1257951396
34
Z uwagi na fakt, że w rzeczywistych warunkach eksploatacji czas pracy elementu może być limitowany wystąpieniem dowolnego z powyższych przypadków, trwałość możemy zdefiniować jako minimalny czas spośród wyżej wymienionych tci
(4 6)
tc = min {tci}
4.1.2. Model matematyczny procesu pełzania i zniszczenia
Równanie równowagi ciała sztywnego w układzie kartezjańskim ma postać
T311 ■
(4.7)
gdzie:
ay — tensor naprężeń,
— siły objętościowe,
ij -1,2,3.
Tensor odkształceń ey jest powiązany ze składowymi przemieszczeń związkiem

^thi, 3u, 1
dx. + 3xL
V j
Analogiczny związek możemy zapisać dla prędkości odkształceń i przemieszczeń
chij
3xj
3uj
3xi
(4.9)
Zakładając, że na części sp powierzchni ciała zadano siły, a na części su przemieszczenia, warunki brzegowe mają postać:
Ui = Uj na su
Pi=Pi na sD (4.10)
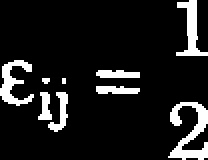
Przy założeniu sumowania się odkształceń związki konstytutywne opisuje zależność:

_eE ,
“ eij +

(4.11)
gdzie:
(4.12)
(4.13)
(4.14)
8y - symbol Kronekera.
Przyjmując w stanie jednoosiowym opis pełzania ogólnym równaniem potęgowym
e = BanK(t) (4.15)
w stanie przestrzennym dostajemy
= | B 1 K(t) (oy - lo^ 8„) (4.16)
w szczególności dla równania Nortona:
= | B af 1 (a;j - ~CTkk 5ij) (4.17)
Przedstawiony układ równań będący modelem matematycznym procesów pełzania pozwala wyznaczyć składowe stanu naprężenia i odkształcenia w analizowanym ciele. Uwzględnienie w analizie procesów zniszczenia charakteryzowanych przez parametr zniszczenia a) wymaga uzupełnienia równań konstytutywnych o parametr co oraz równanie opisujące jego zmianę. W przypadku równania (4.17) otrzymujemy:
2 B (1 - co)n (<7ij 3CkkSu) (4‘18)
Zmianę parametru zniszczenia w przestrzennym stanie naprężeń opisuje uogólnione równanie kinetyczne (3.6) [16, 18, 51]
co - A
1 - co
(4.19)
Wyszukiwarka
Podobne podstrony:
umnk • Z uwagi na fakt, że S2e(XTX)~x jest obciążonym estymatorem macierz} wa
24 Janusz POBOŻNIAK Z uwagi na fakt, że producenci oferują całe serie płytek z dobrze zdefiniowanymi
DSC03725 (2) Ze wzoru *2.344) wynika korelacja pomiędzy X i p. określona wzorem: (2.508) Z uwagi na
Konrad Marciniak Ma ona szczególne znaczenia dla niniejszej pracy z uwagi na fakt, że jej istota odz
indywidualizacji pracy nauczyciela z uczniem, co było bardzo ważne z uwagi na fakt, że w projekcie u
skanuj0140 Zaczyński ło zwrócenie uwagi na fakt, że nie zawsze mechanizmy motywacyjne sterujące celo
założeniu, że zmiana warunków klimatycznych dla kolejnych dni może być opisana jako stochastyczny pr
założeniu, że zmiana warunków klimatycznych dla kolejnych dni może być opisana jako stochastyczny pr
założeniu, że zmiana warunków klimatycznych dla kolejnych dni może być opisana jako stochastyczny pr
założeniu, że zmiana warunków klimatycznych dla kolejnych dni może być opisana jako stochastyczny pr
skanuj0120 (16) Przechowywanie dóbr ■ych ulegać zmianie z uwagi na to, że np. z opakowań jednostkowy
skanuj0233 30 Rozdział 1 Jednocześnie zwraca się uwagę na fakt, że niekoniecznie strategię należy łą
PA030077 142 BUNT W TREBLINCE go57. Ze względu na fakt, że parzysta strona ulicy Natolińskiej przyle
więcej podobnych podstron