2323411290
PROGRAM ROZWOJOWY
a POLITECHNIKI WARSZAWSKIEJ
Ćwiczenie 3 5
„Modelowanie układu wykonawczego w środowisku MATLAB / SIMULINK”
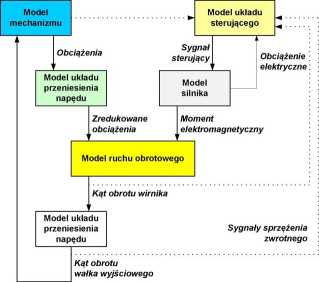
Rys. 3.4. Zasada budowy symulacyjnego modelu elektrycznego układu napędowego
Do wyznaczenia tych wielkości służą zależności opisujące modele: napędzanego mechanizmu, przekładni mechanicznych oraz silnika napędowego i jego układu sterującego wraz z torami sprzężeń zwrotnych.
3.1.3. Symulacja pracy układu
Pod pojęciem symulacji działania systemu rozumiane jest rozwiązanie zadania zapisanego w postaci modelu matematycznego z użyciem „symulatora”, najczęściej w dziedzinie czasu [10]. W przypadku układów napędowych symulacja dotyczy z reguły czasowych odpowiedzi układu na wymuszenia w postaci sygnałów sterujących, które są funkcją czasu i zdarzeń w systemie, oddziaływujących na wejścia poprzez pętle sprzężenia zwrotnego. Symulacja komputerowa wymaga wcześniejszego zapisania modelu matematycznego w postaci symbolicznej za pomocą operatorów wybranego języka symulacyjnego. Układ ten jest następnie rozwiązywany metodami numerycznymi, przy czym symulatorem jest program komputerowy, który obecnie bardzo często stanowi element większego pakietu matematycznego. Wyniki symulacji w postaci liczbowej (np. szeregów czasowych) lub zależności graficznych stanowią podstawę do formułowania wniosków dotyczących zamodelowanego układu.
3.1.4. Cel ćwiczenia
1. Praktyczne zapoznanie się z zasadami modelowania mechanizmów i zespołów przeniesienia napędu.
2. Poznanie możliwości wykorzystania symulacji komputerowej w pracach inżynierskich.
UNIA EUROPEJSKA
EUROPEJSKI FUNDUSZ SPOŁECZNY
a KAPITAŁ LU DZKI Symulacja w projektowaniu
narodowa sidAitciA spójność urządzeń mechatronicznych
Wyszukiwarka
Podobne podstrony:
PROGRAM ROZWOJOWY a POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 3 „Modelowanie układu
PROGRAM ROZWOJOWY a POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 7 „Modelowanie układu
PROGRAM ROZWOJOWY a POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 9 „Modelowanie układu
PROGRAM ROZWOJOWY a POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 11 „Modelowanie układu wykonawczego w
PROGRAM ROZWOJOWY a POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 13 „Modelowanie układu wykonawczego w
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 11 „Programowanie frezarki sterowanej
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ 2 Ćwiczenie 3 „Programowanie frezarki sterowanej
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 3 „Programowanie frezarki
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ 4 Ćwiczenie 3 „Programowanie frezarki sterowanej
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ 6 Ćwiczenie 3 „Programowanie frezarki sterowanej
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 7 „Programowanie frezarki
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 9 „Programowanie frezarki
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 11 „Czujniki pól magnetycznych. Badanie
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 7 „Czujniki pól magnetycznych. Badanie
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 9 „Czujniki pól magnetycznych. Badanie
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ 8 Ćwiczenie 1 „Formowanie wtryskowe termoplastycznych
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 4 11 „Obróbka na frezarce sterowanej
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ 2 Ćwiczenie 4 „Obróbka na frezarce sterowanej numeryczni
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 4 3 „Obróbka na frezarce
więcej podobnych podstron