2323411292
PROGRAM ROZWOJOWY
a POLITECHNIKI WARSZAWSKIEJ
Ćwiczenie 3 7
„Modelowanie układu wykonawczego w środowisku MATLAB / SIMULINK”
Model mechanizmu
Ze względu na przyjętą koncepcję modelowania napędzany mechanizm jest reprezentowany przez momenty siły i masowy moment bezwładności, które mogą być funkcjami czasu, kąta obrotu, prędkości lub innych wielkości
Mmech = » Jmech = (3.3)
Funkcje te opracowywane są na podstawie znajomości koncepcji konstrukcyjnej lub dokumentacji technicznej układu napędowego.
W śrubowym mechanizmie zamiany ruchu (rys. 3.7) zewnętrzna siła F przyłożona do popychacza obciąża czynny element mechanizmu momentem Msr [12]
Msr =YFtg(/ + p') (3.4)
gdzie: d2 - średnica podziałowa gwintu, y - kąt pochylenia linii śrubowej, p ’ - pozorny kąt tarcia pary gwintowej.
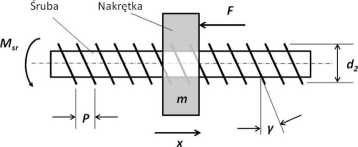
Rys. 3.7. Schemat mechanizmu śrubowego
Pozorny kąt tarcia w mechanizmie oblicza się ze wzoru
P-arctg-p—r. (3.5)
cos(a/2J
w którym a oznacza kąt zarysu gwintu. Wzór (3.4) opisuje tylko jeden przypadek obciążenia mechanizmu tzn. taki, gdy siła przyłożona do popychacza działa przeciwnie do kierunku jego ruchu. Aby model uwzględniał także przypadek odwrotny (tzn. gdy zewnętrzna siła działa zgodnie z napędem), konieczne jest zmodyfikowanie wzoru przez uzależnienie znaku pozornego kąta tarcia od zwrotu prędkości
Msr = tgfr + ^sgnj^-jj (3-6)
przy czym przez <piX oznaczono kąt obrotu śruby.
Przedstawiony opis jest jednym z najczęściej używanych w pracach inżynierskich, ma jednak pewną wadę. Obliczany moment łączy w sobie zarówno moment tarcia mechanizmu, jak i moment czynny od przyłożonej siły. Przy modelowaniu mechanizmów samohamow-
UNIA EUROPEJSKA
EUROPEJSKI FUNDUSZ SPOŁECZNY
a KAPITAŁ LU DZKI Symulacja w projektowaniu
narodowa sidAitciA spójność urządzeń mechatronicznych
Wyszukiwarka
Podobne podstrony:
PROGRAM ROZWOJOWY a POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 3 „Modelowanie układu
PROGRAM ROZWOJOWY a POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 5 „Modelowanie układu
PROGRAM ROZWOJOWY a POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 9 „Modelowanie układu
PROGRAM ROZWOJOWY a POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 11 „Modelowanie układu wykonawczego w
PROGRAM ROZWOJOWY a POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 13 „Modelowanie układu wykonawczego w
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 11 „Programowanie frezarki sterowanej
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ 2 Ćwiczenie 3 „Programowanie frezarki sterowanej
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 3 „Programowanie frezarki
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ 4 Ćwiczenie 3 „Programowanie frezarki sterowanej
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ 6 Ćwiczenie 3 „Programowanie frezarki sterowanej
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 7 „Programowanie frezarki
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 3 9 „Programowanie frezarki
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 11 „Czujniki pól magnetycznych. Badanie
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 7 „Czujniki pól magnetycznych. Badanie
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 9 „Czujniki pól magnetycznych. Badanie
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ 8 Ćwiczenie 1 „Formowanie wtryskowe termoplastycznych
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 4 11 „Obróbka na frezarce sterowanej
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ 2 Ćwiczenie 4 „Obróbka na frezarce sterowanej numeryczni
PROGRAM ROZWOJOWY POLITECHNIKI WARSZAWSKIEJ Ćwiczenie 4 3 „Obróbka na frezarce
więcej podobnych podstron