365606312
Każda obrabiarka w zależności od jej przeznaczenia produkcyjnego jest wyposażona w zespoły robocze o niezbędnej dla nich liczbie ruchów prostoliniowych i obrotowych. Pod względem liczby ruchów prostoliniowych zespoły robocze mogą być jednowspółrzędnościowe, dwuwspółrzędnościowe (płaskie) i trzywspółrzędnościowe (przestrzenne). Zespołami jednowspółrzędnościowymi są np. suwaki strugarek lub dłutownic i niektóre jednostki obróbkowe, zespołami dwuwspólrzędnościowynii są np. stoły krzyżowe i suporty, a zespołami trzywspólrzędnościowymi są np. stoły frezarek wspornikowych. Przykłady takich zespołów roboczych podano na rysunku 2.
Zespoły robocze przystosowane do wykonywania ruchów obrotowych są wyposażone we wrzeciona do wykonywania ruchów głównych lub prowadnice obrotowe do wykonywania ruchów posuwowych lub nastawczych - jak to pokazano poglądowo na rysunku 2 d i e.
Układy konstrukcyjne trzech różnych obrabiarek z zaznaczonymi kierunkami, przemieszczeń zespołów roboczych w przyjętym układzie osi współrzędnych X, Y, Z oraz kierunkami ruchów obrotowych (głównych w i nastawczych C) przedstawiono na rysunku 3.
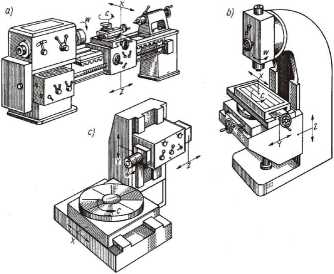
Rys. 3. Układy konstrukcyjne z za znaczonymi kierunkami przemieszczeń liniowych i kątowych: a) tokarki kłowej, b) frezarki wspornikowej pionowej, c) wytaczarko-frezarki z łożem poprzecznym [6].
Kierunki ruchów prostoliniowych oraz osie obrotu zespołów roboczych ustala się na etapie projektowania obrabiarki, przyjmując najbardziej racjonalny pod względem użytkowym wariant konstrukcyjny, przy czym oś współrzędnych Z przyjmuje się jako oś wrzeciona roboczego.
W wielu przypadkach te same powierzchnie mogą być wykonane na obrabiarkach o odmiennych układach konstrukcyjnych, przy zastosowaniu różnych wariantów obróbki. Przykłady ilustrujące zastosowanie czterech różnych odmian konstrukcyjnych szlifierek do płaszczyzn oraz właściwych im sposobów obróbki przedstawiono na rysunek 4.
Układ kinematyczny obrabiarki stanowią mechanizmy służące do nadania zespołom roboczym obrabiarki ruchów niezbędnych do wykonania procesu roboczego. Mechanizmami, z których składa się układ kinematyczny obrabiarki, są najczęściej łańcuchy kinematyczne. Stanowią one zbiór powiązanych ze sobą spójnie par kinematycznych, utworzonych
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego"
13
Wyszukiwarka
Podobne podstrony:
7 9.4.2. WYDAJNOŚĆ POMPY Wydajność pompy jest zależna od jej konstrukcji, ciśnienia tłoczenia
Zdjęcie0115 (5) zatem antykoagulacyjna aktywność heparyny jest zależna od jej połączenia kompleksowe
63877 Zdjęcie0115 (5) zatem antykoagulacyjna aktywność heparyny jest zależna od jej połączenia kompl
IMG478 (4) jcdnolmową, w drugim zaś dwulinową. Różne są konstrukcje kolei
Jasiński Motywowanie w przedsiębiorstwie (15) bądź też zróżnicowany jesi ale w zależności od stanu
Uniwersytet Rzeszowski Internet w mieszkaniach - zależnie od właściciela. W niektórych mieszkaniach
warstwa fizyczna ISDN ramki w warstwie fizycznej różnią się w zależności od tego, czy ramka jest
22239 Zdjęcie0098 (12) ciała sztywnego ^ zależności od warunków początkowych możliwych jest 16 waria
9 W zależności od kierunku studiów, możliwy jest wybór następujących
Warzywnictwo022 bez szyjki lub może mieć mniej lub więcej zaznaczoną szyjkę. Zależnie od odmiany zak
P1070086 Sformułowanie prowemu-. ■ # mowy śmienia się i wzbogaca zależnie od jej roz-L woju i skompl
2 (3075) W zależności od tego jak woda jest związana w krysztale możemy wyróżnić: • &nbs
gdzie: prefix to + lub - w zależności od tego czy dokument jest zarejestrowany czy nie; doc-class -
012 tif 12 W zależności od położenia i przeznaczenia w stropie drewnianym wyróżnia się belki środkow
P1190688 EM, SJS - leczenie • zależnie od czynnika wywołującego (jeżeli jest
zależną od jej miejsca w tabeli 17 (kwadrat na 1. miejscu otrzymał 10 pkt., na 2. miejscu — 9 p
więcej podobnych podstron