4508849
242 Piotr Frączak
gdzie A jest macierzą podstawową obwodu elektrycznego (macierz stanu - układ automatyki), B jest macierzą wymuszeń obwodu elektrycznego (macierz wejść -układ automatyki), x jest wektorem stanu (wektor stanu - układ automatyki).
Równanie (2) ujmujące opis obwodu elektrycznego w postaci macierzowej odpowiada określonej strukturze schematu blokowego (rys. 1). Schemat blokowy zamieszczony na rys.l stanowi układ automatyki. W układach automatyki x(t) oznacz pochodną wektora stanu.
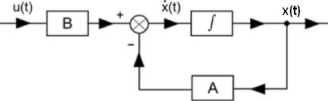
Rys. 1. Struktura układu opisanego równaniem (2)
2. OPIS ANALITYCZNY WYBRANYCH UKŁADÓW AUTOMATYKI Z SYGNAŁAMI ZAKŁÓCAJĄCYMI
Klasyczne badanie układów automatyki w relacji: wejście sterujące - wyjście lub wejście zakłócające - wyjście nie ujmują bezpośrednio w całości obrazu dynamiki danego układu. Aby uzyskać całościowe ujęcie dynamiki danego układu, opisuje się go metodą zmiennych stanu. Metoda ta pozwala opisać stan układu automatyki w każdej chwili [4].Poniżej zamieszczono wybrane układy automatyki z uwzględnieniem sygnałów zakłócających i odpowiednio je opisano.
2.1. Działanie sygnału zakłócającego na wejście układy automatyki
Dynamikę układu liniowego ciągłego stacjonarnego wielowymiarowego (rys. 2), w którym występuje oddziaływanie sygnałów zakłócenia na wejście układu ujmują równanie stanu (3) i równanie wyjścia układu (4).
x(t) = A • x(t) + B • u (t) + E • z(t) (3)
y(t) = C-x(t) (4)
przy czym: x(t) e n - wektor stanu; u(t) e m - wektor wymuszeń; y(t) e wektor odpowiedzi; z(t) e m -wektor sygnałów zakłócających; A - macierz stanu o wymiarze nxn\ B - macierz wejść o wymiarze nxm:C - macierz wyjść o wymiarze lxn ; E - macierz wejść sygnałów zakłócających o wymiarze nxm.
Wyszukiwarka
Podobne podstrony:
Projekt NUMPRESS, Zad. 2: Program NUMPRESS-Explicit: podstawy teoretyczne gdzie L jest macierzą-oper
057 3 Równanie sianu 57 (7.33) x(0 = F(r,ro)x(fo) gdzie F(;,;0) jest macierzą okre
Walec Pb = 2irrh P = 2xr(r+h) V = trr~li gdzie / jest promieniem podstawy. h wysokością walca • Stoż
CCF20101007�012 13 Yu = " R Rv 1+* (2-3)R, gdzie R =R, *o jest rezystancją zastępczą obwodu wid
Metody numeryczne - 2. Metody dokładne rozwiązywania układów równań liniowych gdzie J jest macierzą
Walec h • Kula Pb = 2nrh P = 2nr(r + li) V = nr2h gdzie r jest promieniem podstawy, h - wysokością w
Chemia rep67 3. Alkohole Struktura Alkohole są związkami o ogólnym wzorze ROH, gdzie R jest dowolną
152. Dla danego niezerowego v € R4 określamy macierz H = I--—vvT, gdzie I jest macierzą identycznośc
0)Ćwiczenia z teorii sterowania - sprawdzian nr 2 - grupa A1 Zadanie Dana jest macierz stanu 1. Obli
(1)Ćwiczenia z teorii sterowania - sprawdzian nr 2 - grupa A1 Zadanie Dana jest macierz stanu _f>
DSC02332 (4) Georg Simon Ohm (1787-1854) jest odkrywcą podstawowego dla elektrotechniki prawa Ohma,&
więcej podobnych podstron