5783291369
6 Odwrotne zadanie kinematyki
Rysunek 2.1: Proste zadanie kinematyki - opis w tekście
|
C2 = cose2 = * H-t-4-4 2aia2 |
(2.1) |
|
zatem ©2 jest równe: | |
|
©2 = arccos(C2) |
(2.2) |
|
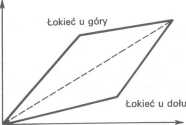
Mając na uwadze postać konfiguracji „łokieć u góry” i „łokieć u dołu”, można wyprowadzić zależność algebraiczną dającą możliwość rozróżnienia obu członów robota: | |
|
sin(02) = ±(\/l - C|), |
(2.3) |
|
©2 = ar etan--—. O2 |
(2.4) |
|
y2 a2sin(@2) ©1 = ar etan--ar etan-. _ ., X2 ai+02C0S(©2j |
(2.5) |
Wyszukiwarka
Podobne podstrony:
Rys. 10-9. Rysunek taboretu o podłożu miękkim (opis w tekście) architrend.pl 10 Sznur
3. Odwrotne zadanie kinematyki. W opracowaniu tym odwrotne zadanie kinematyki zostanie wyznaczone ty
1. Wstęp. Przedstawiony tutaj projekt z robotyki jest kompletnym rozwiązaniem odwrotnego zadania kin
Do rozwiązania zadania wykorzystaj: Opis procesu technologicznego produkcji dżemu ekstra z czarnej p
Do rozwiązania zadania wykorzystaj: Opis procesu technologicznego produkcji dżemu ekstra z czarnej p
IMAG0603 (3) Wykorzystanie modeli matematycznych• Zadanie wprost i odwrotne • Zadanie wprost (symula
IMAG0604 (2) wykorzystanie modeli matematycznych• Zadanie wprost i odwrotne • Zada
IMAG0605 (2) Wykorzystanie modeli matematycznych • Owa rodzaje zadania odwrotnego • Zadani
IMAG0607 (2) Wykorzystanie modelimatematycznych • Dwa rodzaje zadania odwrotnego •
Zadania stat opis 1 STATYSTYKA OPISOWA (średnia arytmetyczna, mediana, kwantyle, dominanta, rozstą
Zadanie 16. Opis objawów klinicznych świadczy o chorobie „Obrzęk powiek, chwiejność zadu,
001 2 Obliczenie odwrotnego zadania geodezyjnego metodą średniej szerokości,wzorami opracowanymi prz
278 2 278 7. Różnice skończone w całkowaniu i różniczkowaniu 73.8. Interpolacja odwrotu* Zadani^. Da
Zadania Ogólny opis poszczególnych zadań projektowych - szczegóły będą przekazywane przez
55596 Zadania stat opis 1 STATYSTYKA OPISOWA (średnia arytmetyczna, mediana, kwantyle, dominanta,
więcej podobnych podstron