6075430021
4.1. MONTAŻ TYPOWYCH ZESPOŁÓW MASZYNOWYCH
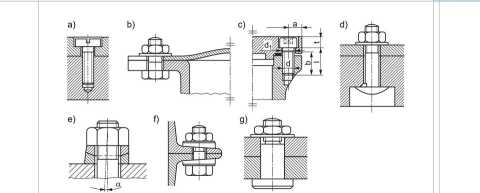
Rys. 4.1. Przykłady typowych połączeń gwintowych: o) śrubą krytą, b) korpusu i pokrywy, c) śrubą z gniazdem wewnętrznym ukrytą w pokrywie, d) z użyciem śruby noskowej zabezpieczającej przed obrotem, e) z podkładkami kulistymi - oś śruby nieprostopadła do powierzchni,/) ze śrubą pasowaną (4]


Rys. 4.2. Kolejność dokręcania śrub lub nakrętek. [1,6]

Pasowanie
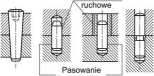
spoczynkowe
Rys. 4.3. Wtłaczanie kołków ustalających: a) kołki, b) oprawka do wtłaczania kołków 1 - tuleja, 2 - śruba ograniczająca, 3 - bijak [6)
Wyszukiwarka
Podobne podstrony:
metodyki w zakresie ustalania kolejności montażu części i zespołów maszyn, która może się przyczynie
W pracy przedstawiono zagadnienie wyboru najkorzystniejszej kolejności montażu części i zespołów mas
164 4. PODSTAWOWE OPERACJE TECHNOLOGICZNE MONTAŻUMontaż typowych zespołów maszynowych W TYM ROZDZIAL
167 4.1. MONTAŻ TYPOWYCH ZESPOŁÓW MASZYNOWYCH naciskowe), krążkowe i pierścieniowe. Zapewniają one
SPIS TREŚCI 4. Podstawowe operacje technologiczne montażu EH Montaż typowych zespołów
NARODOWEJ Marian NowotnikRozróżnianie typowych części i zespołów maszyn 311[32].O1.06Poradnik dla
Maszyna Turinga 3 Przykład 3: W kolejnym przykładzie zobaczymy jak MT realizuje jeden z typowych alg
Image 27 31 Rys 2.5. Przykłady struktur kinematycznych typowych robotów przemysłowych wg [9] Rys. 2.
Rys. 1. Przykłady połączeń klejonych. Źródło: Rutkowski A.: Części Maszyn. WSiP, Warszawa
4. Podstawowe operacje technologiczne montażu ■ Montaż typowych
IMG#66 (5) Rys. 9.4. Przykład schematu montażowego połączeń wewnętrznych wnęki sterowniczej pola
- informacyjne, służące do przetwarzania informacji (na przykład maszyny matematyczne). Rys. 5. Przy
3.1. Montaż wskazanych zespołów mechanizmów maszyn i urządzeń zgodnie z
77 (89) ST-/ * szt /POZ 9J [_SO‘BO‘iQ Rys. 6-7. Przykład rysunku montażowego - konstrukcja pionowego
więcej podobnych podstron