6781097312
Tracking errors decreasing in CNC system of machinę tools 87
and velocity feedforward value. The torque reference value is the sum of the velocity loop output and torque feedforward value.
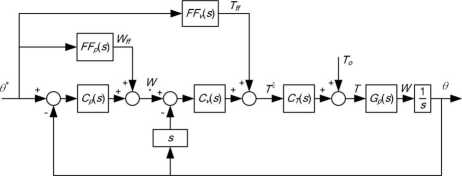
Fig. 1. Błock diagram of servo system structure with command feedforward control
We can assume CT(s) -1 for perfect current control. For motion unit given by
first order equation: G„(s) = -—-—the transfer function from the torque input
p Js + D
T* and servo-drive position is expressed as:
G(s) =
T‘(s)
1
J.i2 + Ds '
The perfect position tracking can be achieved if:
(2)
FFV (s) = Js2 +Ds.
Thus the output from velocity FFv(s) feedforward controller is:
Tff(s) = (Js1+Ds)8*(s),
dr
dl
(3)
Wyszukiwarka
Podobne podstrony:
Tracking errors decreasing in CNC system of machinę tools 89 Fig. 3. The architecture of CNC control
Tracking errors decreasing in CNC system of machinę tools 91 Fig. 6. Waveforms of velocity and posit
93 Tracking errors decreasing in CNC system of machinę toolsLITERATURĘ 1. Tsai M.-
7 The Role of the Government In this system of Social Partnership, the government has a com-pensator
AMADA MIYACHI EUROPE ISO employees In Euroof A revenue of C48 f.‘ 3 Manufaciurmg Netherlands and&nbs
P1190299 ‘54 Irena I arnik hfe of locml populałion* in ihc bcginning of thc Iron Age. and il can be
Panel 5. cz. l. European Exclaves in thf. Process of De-bordf.ring and Re-bordering SALA
p62 (2) • ILLUS.51 TRANSMISSION—SHOWING ALL PARTS IN CORRECT ORDER OF ASSEMBLY Illustrations 51 and
p62 (2) • ILLUS.51 TRANSMISSION—SHOWING ALL PARTS IN CORRECT ORDER OF ASSEMBLY Illustrations 51 and
essent?rving?79 ABOUT THE AUTHOR Dick Onians, bom in 1940 in a house fuli of books, folk carvings an
Picture 7 Track O Masters of Metal A faeavy/thrasb meta) style-* workout in tlie key of K usiug eoat
ŚWIAT ^^The World of Machinę Tools & Tools^^™CRRARIARI5K_ I MARZIEDZI
bbcn14?ck The Doctor and Martha go in search of a real live dodo, and are transported by the TARDIS
więcej podobnych podstron