7957909537
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II,
Kraków, 16-18 października 2012 r.
Poszczególne segmenty każdego z odnóży połączone zostały ze sobą przy pomocy więzów Revolute Joint, przy jednoczesnym oznaczeniu wynikowych stopni swobody jako aktywne, sterowane niezależnie. Obliczona przez środowisko ogólna liczba stopni swobody (ang. DOF - deegres of freedom) wynosi zero (obliczenia nie uwzględniają aktywnych stopni swobody). Utworzono ponadto 18 poleceń służących do niezależnego sterowania każdym przegubem (rys. 5). Bezpośrednią kontrolę na przemieszczeniem kątowym w każdej parze kinematycznej daje narzędzie Simulation with Commands. Za pomocą suwaków ustawiona może zostać pozycja wszystkich przegubów, a rezultat tego ruchu przenoszony jest natychmiastowo na wszystkie połączone segmenty mechanizmu.
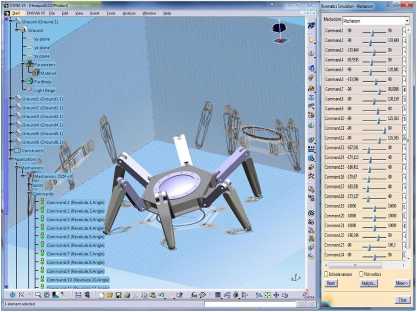
Rys. 5 Ogólny widok interfejsu graficznego modułu DMU Kinematics środowiska CATIA V5; widoczne pola analizy mechanizmu i interfejs narzędzia Simulation with Commands
Jak wspomniano wcześniej, aplikacja CATIA V5 umożliwia nagrywanie i odtwarzanie symulacji. Może to zostać zrealizowane na dwa sposoby. Pierwszą możliwością jest nagrywanie sekwencji ruchowych poprzez manualne ustawienie przemieszczeń w każdym z przegubów dla każdej chwili czasu trwania symulacji. Ze względu na dużą liczbę stopni swobody zadanie to jest bardzo żmudne, a wynik miałby charakter jednorazowy - wprowadzenie zmian w sekwencji symulacji nie jest możliwe do wykonania w prosty sposób. Drugim sposobem jest zapisanie przemieszczeń w każdym z przegubów jako funkcji czasu. Umożliwia to zaprogramowanie sekwencji ruchu mających charakter prezentacyjny. Po zakończeniu symulacji może być ona zmodyfikowana a następnie odtworzona ponownie. Celem niniejszej pracy jest natomiast stworzenie alternatywnej możliwości w postaci symulatora, pozwalającego na zmianę wszelkich parametrów i generowanie przemieszczeń w czasie rzeczywistym. Symulator taki wymaga utworzenia oddzielnego interfejsu graficznego umożliwiającego sterowanie modelem i procesora
6
Wyszukiwarka
Podobne podstrony:
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Trzmiel A
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. •
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. metody
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Główne ok
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Rys. 11 L
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Ostatnią
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. nad syste
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. 2. Analiz
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. nie znajd
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. 3. Symula
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Rys. 3 Og
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. DMU Kinem
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Wszystkie
Artykuł Autorski, XI Forum Inżynierskiego ProCAx cz. II, Kraków, 16-18 października 2012 r. Aktualne
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Dr inż. Mac
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Do znanych
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Najważniejs
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012
więcej podobnych podstron