7957909536
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r.
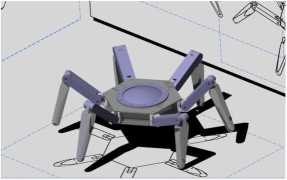
Rys. 3 Ogólny widok zamodelowanej makiety robota kroczącego
Przyjęto strukturę korpusu typu holonomicznego. Odnóża rozmieszczone zostały na bazie koła w równych odstępach wynoszących 60°. Każda z sześciu kończyn posiada trzy segmenty połączone szeregowo przegubami obrotowymi. Łączna suma par kinematycznych wynosi 18, przy czym każda z nich napędzana jest z osobna. Ostatni segment posiada zaokrąglenie imitujące kształtem stopę dopasowującą się do nierówności terenu. Wizualizacja modelu pojedynczej kończyny przedstawiona została na rys. 4.

Rys. 4 Modele poszczególnych segmentów odnóża Model kinematyczny
Do wprowadzenia zależności kinematycznych w modelu posłużył moduł przeznaczony do budowania makiet cyfrowych (DMU Kinematics). Jest to bardzo rozbudowana część składowa środowiska umożliwiająca przekształcenie więzów czysto konstrukcyjnych określających jedynie zależności złożeniowe pomiędzy detalami na więzy kinematyczne umożliwiające definiowanie wzajemnych przemieszczeń pomiędzy segmentami. Pod względem graficznego interfejsu użytkownika (ang. GUI - graphic user interface) moduł ten nie różni się znacząco od pozostałych modułów oferowanych przez środowisko. Trzeba jednak zwrócić uwagę na główne narzędzia umożliwiające budowę modeli kinematycznych, jak również ich szczegółową analizę [3],
5
Wyszukiwarka
Podobne podstrony:
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Rys. 11 L
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Trzmiel A
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. •
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. metody
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Główne ok
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Ostatnią
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. nad syste
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. 2. Analiz
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. nie znajd
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. 3. Symula
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Poszczegó
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. DMU Kinem
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Wszystkie
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Rys. 5. Sch
Artykuł Autorski, XI Forum Inżynierskiego ProCAx cz. II, Kraków, 16-18 października 2012 r. Aktualne
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Dr inż. Mac
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Do znanych
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Najważniejs
więcej podobnych podstron