1
Podstawy automatyzacji okrętu
2. Model matematyczny
1
Podstawy
Podstawy
Automatyzacji Okr
Automatyzacji Okr
ę
ę
tu
tu
Politechnika Gda
ń
ska
Wydział Oceanotechniki i Okr
ę
townictwa
St. in
ż
. I stopnia, sem. IV, kierunek:
Specjalno
ś
ci Okr
ę
towe
Marzec 2009
2
2
MODEL MATEMATYCZNY RUCHU STATKU
MODEL MATEMATYCZNY RUCHU STATKU
M. H. Ghaemi
M. H. Ghaemi
Podstawy automatyzacji okrętu
2. Model matematyczny
2
2. MODEL MATEMATYCZNY STATKU
2. MODEL MATEMATYCZNY STATKU
δδδδ
α
αα
α
ψ
ψ
ψ
ψ
ββββ
θθθθ
h
Η
Η
Η
Η
P
SS
v
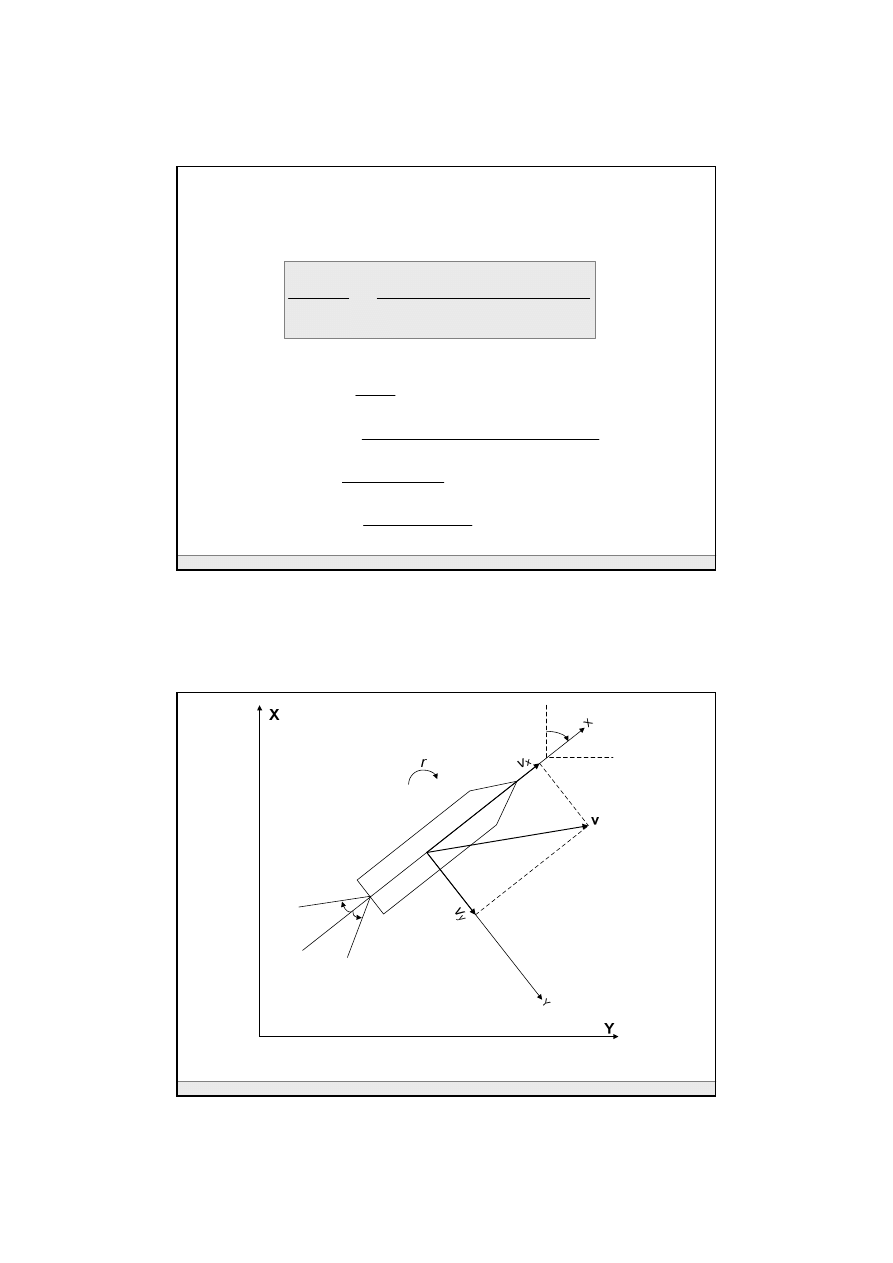
Uproszczony model statku, jako obiektu sterowania
δ
wychylenie steru
h
poło
ż
enie listwy paliwowej
H
skok
ś
ruby nastawnej
P
SS
napór steru strumieniowego
M
ST
moment steruj
ą
ce w układzie
stabilizacji kołysa
ń
statku (lub k
ą
t
nachylenia płetwy)
ψ
kurs statku
v
pr
ę
dko
ść
ruchu
β
k
ą
t dryfu
θ
k
ą
t kołysania
2
Podstawy automatyzacji okrętu
2. Model matematyczny
3
Modele cz
Modele cz
ą
ą
stkowe
stkowe
Model sterowania kursu statku
ψ = ψ(δ)
;
v = cons.
Model sterowania pr
ę
dko
ś
ci statku
v = v(h,H) ;
ψ
= cons.
Model sterowania ruchu statku przy pomocy steru strumieniowego
ψ = ψ
(P
SS
)
Model stabilizacji kołysa
ń
statku
θ = θ
(M
ST
)
lub
θ
=
θ
(
α
)
Modele kombinowane
Modele kombinowane
Sterowanie kursu statku według okre
ś
lonej trajektorii
Sterowanie antykolizyjne
Sterowanie na wodach ograniczonych
sterowanie
ψ
, v
Podstawy automatyzacji okrętu
2. Model matematyczny
4
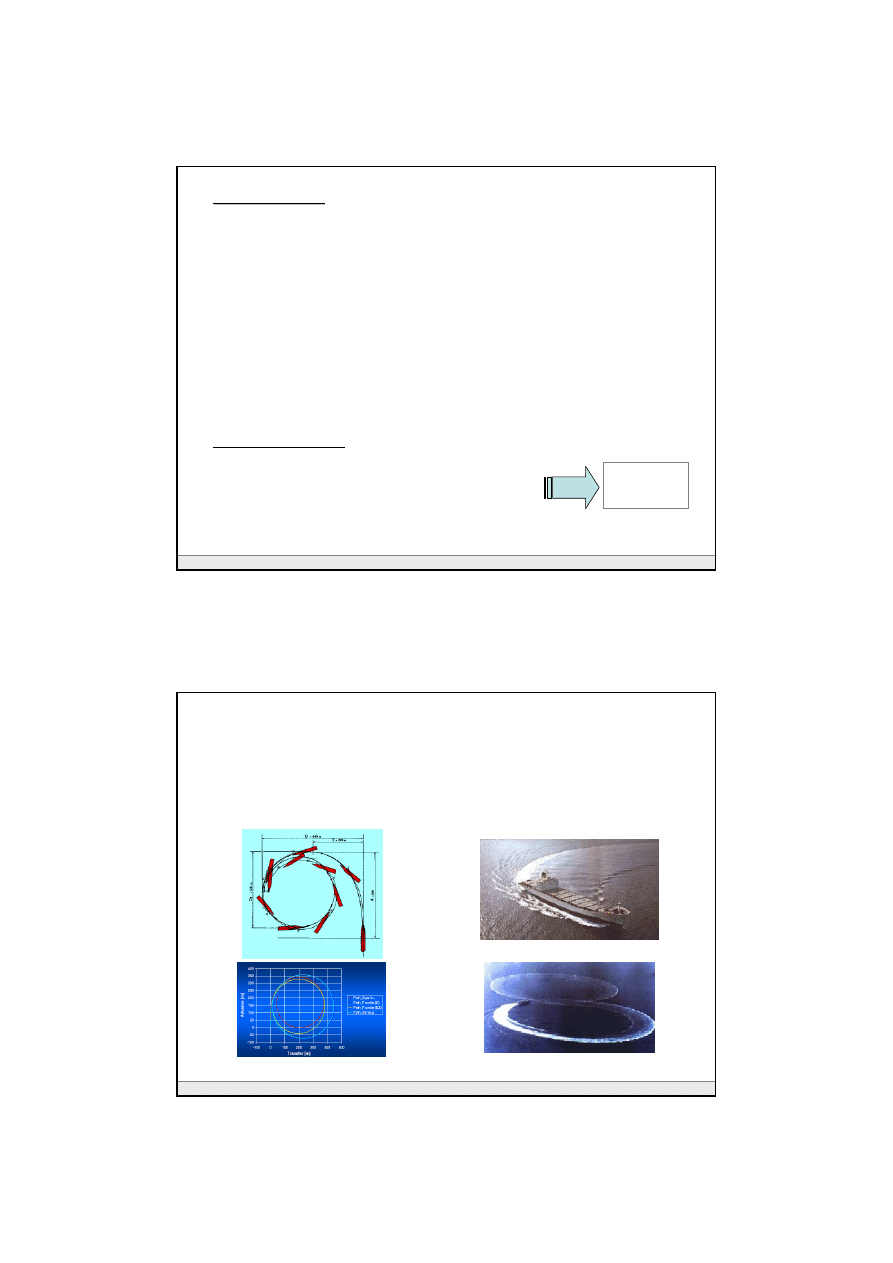
Turning-circle
Próba spiralna
2.1. Charakterystyki statyczne statku
2.1. Charakterystyki statyczne statku
• stateczno
ść
kursowa
• manewrowo
ść
• próby morskie: „spiral”, „pull-out”, zig-zag, „modified zig-zag”, „turning-circle”,
„stopping”, itp. (np.. Na podstawie „ITTC Recommended Procedures”)
3
Podstawy automatyzacji okrętu
2. Model matematyczny
5
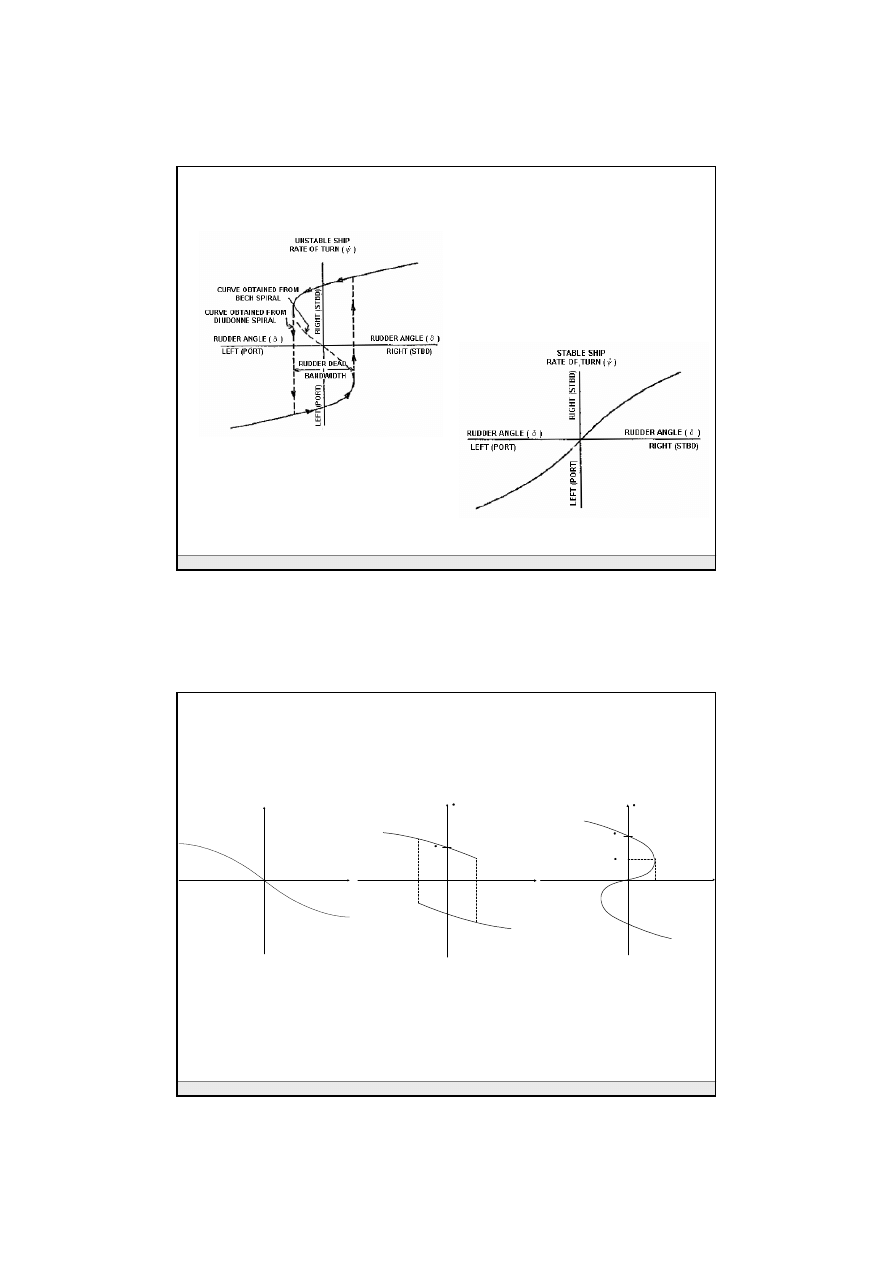
Próba spiralna, statek jest niestateczny
Próba spiralna, statek jest stateczny
Podstawy automatyzacji okrętu
2. Model matematyczny
6
δ
ψ
.
δ
ψ
ψ
0
δ
ψ
δ
kr
ψ
kr
ψ
0
Przykłady krzywych (charakterystyk) Dieudonné i Bech:
a) charakterystyka stateczna, b) i c) charakterystyki niestateczne
a)
b)
c)
Próba spiralna - Krzywy Dieudoné’ i Bech
4
Podstawy automatyzacji okrętu
2. Model matematyczny
7
δ
ψ
2,0
1,0
1,5
0,5
0
-0,5
-1,0
-1,5
-2,0
10
o
20
o
30
o
-30
o
-20
o
-10
o
6 w
12 w
24 w
Zale
ż
no
ść
przebiegu kursowej Dieudonné od pr
ę
dko
ś
ci liniowej statku
nieliniowo
ść
Podstawy automatyzacji okrętu
2. Model matematyczny
8
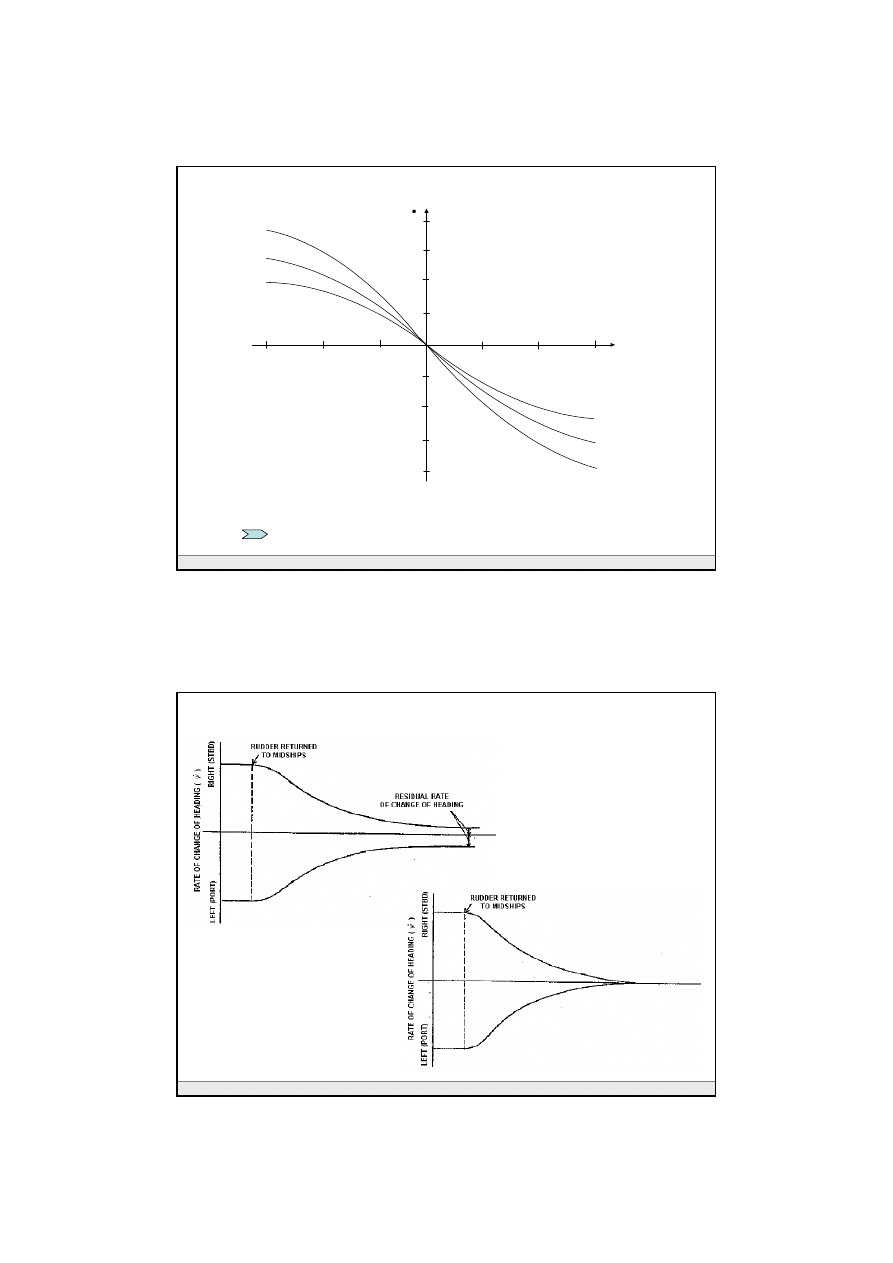
Próba „pull-out”, statek jest niestateczny
Próba „pull-out”, statek jest stateczny
5
Podstawy automatyzacji okrętu
2. Model matematyczny
9
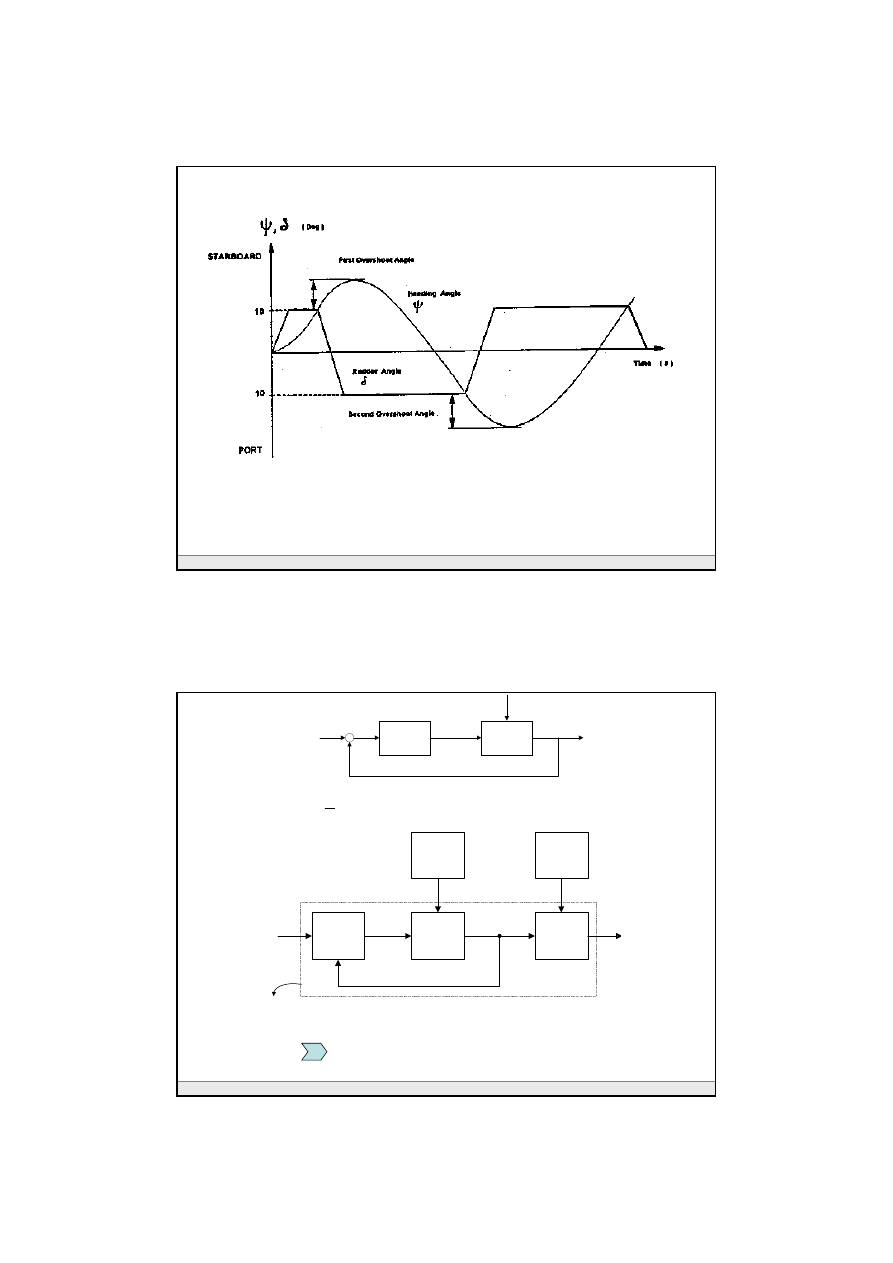
„zig-zag”
Podstawy automatyzacji okrętu
2. Model matematyczny
10
R
S
u
Z
X
_
X +
-
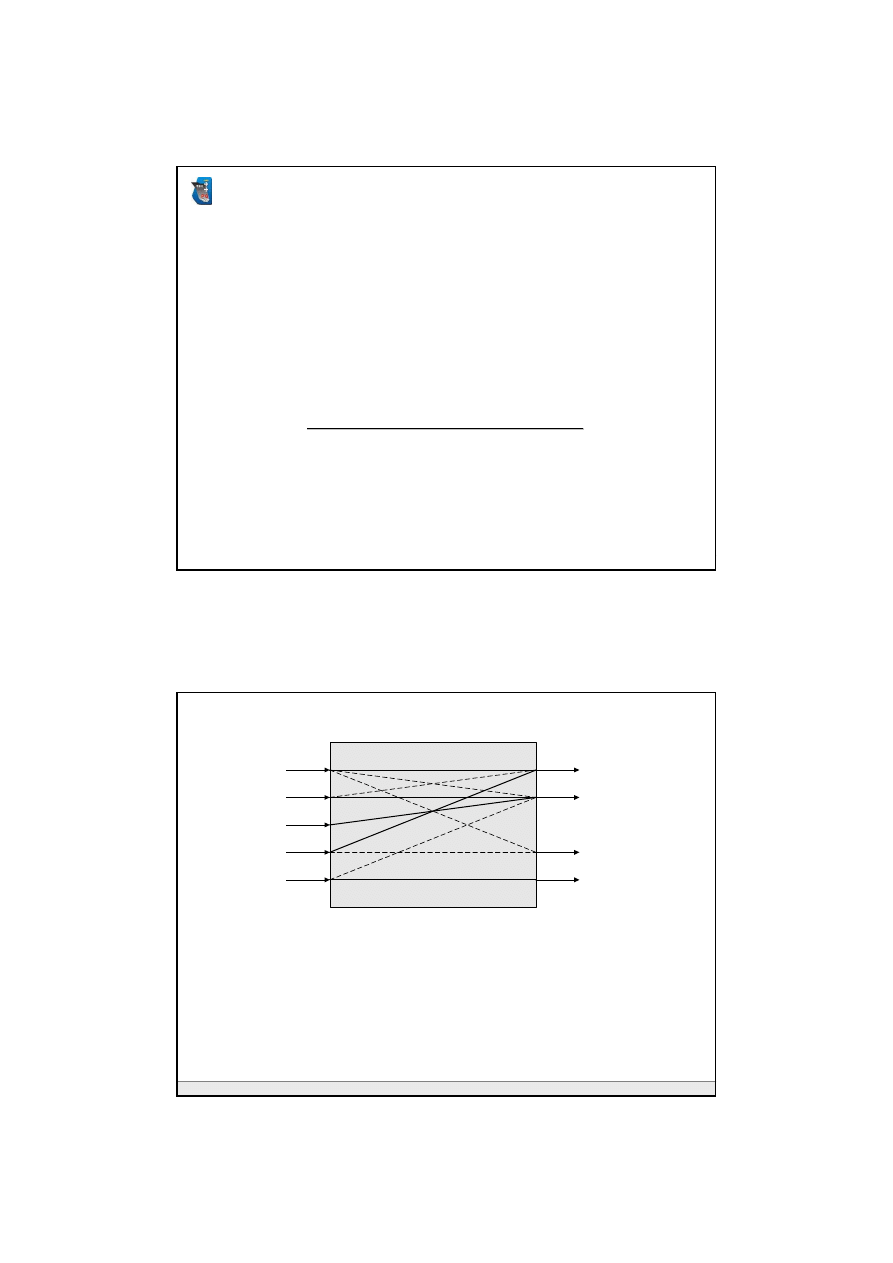
Uproszczony schemat blokowy układu sterowania ruchu statku.
S – obiekt sterowania, R – regulator, u – sygnał nastawczy, X – sygnał regulowany,
- warto
ść
zadana, Z – sygnał zakłócaj
ą
cy
X
urz
ą
dzenie
nastawcze
model
dynamiki
statku
δ
Z
X
fale, wiatr,
pr
ą
dy
δ
c
od
regulatora
urz
ą
dzenie
pomiarowe
zakłócenia
pomiarowe
w
X
m
do
regulatora
obiekt sterowania
Schemat blokowy statku jako obiektu sterownia.
dynamika statku:
urz
ą
dzenie nastawcze:
urz
ą
dzenie pomiarowe:
)
,
,
(
Z
X
f
X
δ
=
&
)
,
,
(
c
X
g
δ
δ
δ
=
&
)
,
(
w
X
h
X
m
=
6
Podstawy automatyzacji okrętu
2. Model matematyczny
11
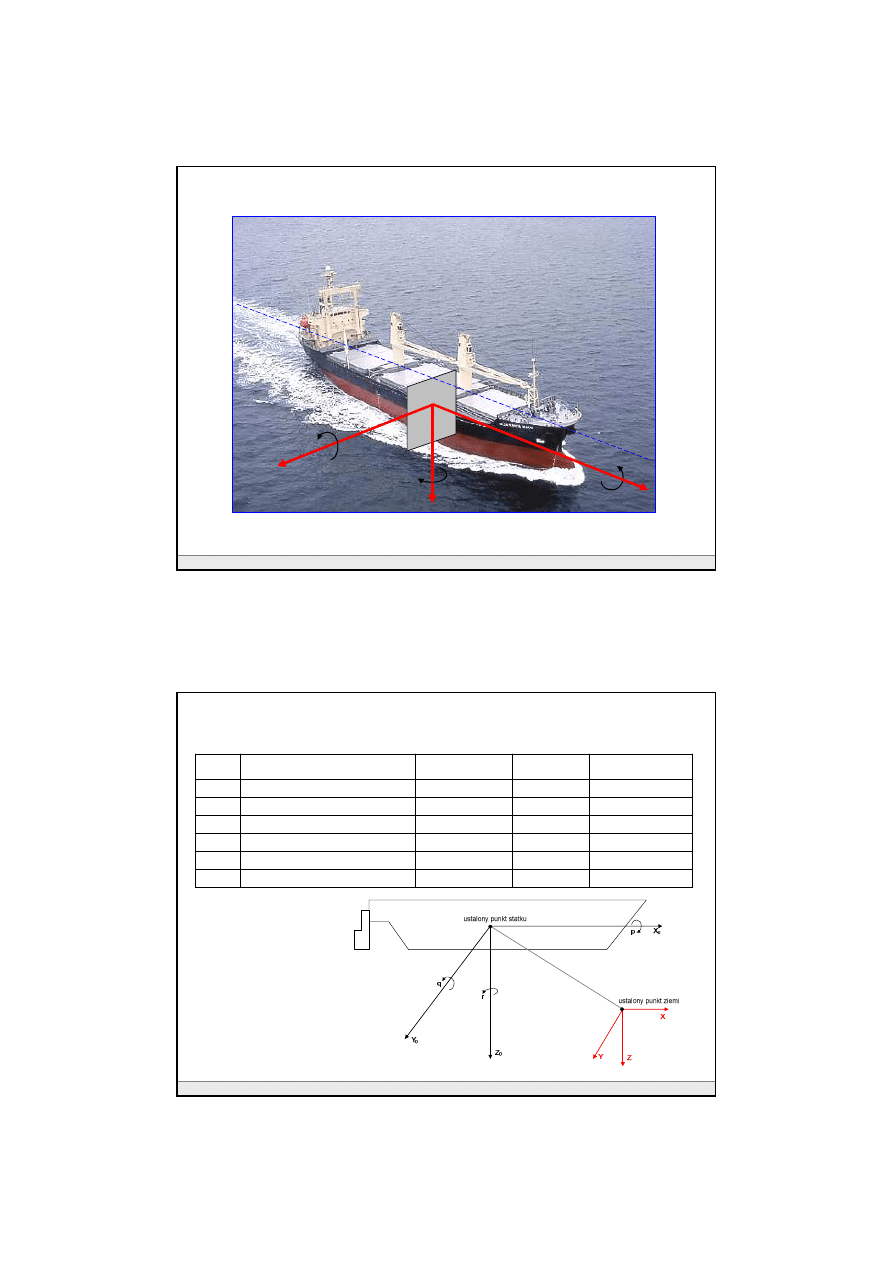
2.2.1. Og
2.2.1. Og
ó
ó
lna posta
lna posta
ć
ć
r
r
ó
ó
wnania ruchu statku
wnania ruchu statku
z
o
y
x
φ
θ
ψ
x: oscylacje pod³u¿ne (surge)
y: oscylacje poprzeczne (sway)
z: nurzanie (heave)
: ko³ysanie (roll)
: kiwanie (pitch)
: myszkowanie (yaw)
φ
θ
ψ
Główne składowe ruchu oscylacyjnego statku
Podstawy automatyzacji okrętu
2. Model matematyczny
12
Dynamika: kinematyka + kinetyka
ψ
r
N
Obrót wokół osi pionowej z
6
θ
q
M
Obrót wokół osi porzecznej y
5
φ
p
K
Obrót wokół osi wzdłużnej x
4
z
v
z
Z
Pionowe, kierunek osi z
3
y
v
y
Y
Poprzeczne, kierunek osi y
2
x
v
x
X
Wzdłużne, kierunek osi x
1
Współrzędne Eulera liniowe
i kątowe
Prędkości liniowe i
kątowe
Siły i momenty
wymuszające
Składowa ruchu
L.p.
Składowe ruchu statku
Układy współrz
ę
dnych
(układy odniesienia):
zwi
ą
zanych z
ustalonym punktem ziemi,
zwi
ą
zanych z
ustalonym punktem
statku
7
Podstawy automatyzacji okrętu
2. Model matematyczny
13
∑
⋅
=
v
m
F
&
i
T
z
y
x
r
q
p
v
v
v
]
,
,
,
,
,
[
=
v
n
i
N
M
K
Z
Y
X
T
i
i
i
i
i
i
i
,...,
2
,
1
;
]
,
,
,
,
,
[
=
=
F
np. dla
n
=1:
r
X
q
X
p
X
v
X
v
X
v
X
r
X
q
X
p
X
v
X
v
X
v
X
X
r
q
p
z
v
y
v
x
v
r
q
p
z
v
y
v
x
v
z
y
x
z
y
x
&
&
&
&
&
&
&
&
&
&
&
&
−
−
−
−
−
−
−
−
−
−
−
−
=
1
.
.
.
r
v
v
N
X
X
y
x
,...,
,
: współczynniki tłumienia liniowego,
: współczynniki hydrodynamicznej masy dodanej
Model klasyczny:
: macierz bezwładno
ś
ci statku
: uogólniony wektor pr
ę
dko
ś
ci
: wektor sił i momentów
v
m
i
F
r
v
v
N
X
X
y
x
&
&
&
,...,
,
72 elementów w 6 równaniach
r
N
q
N
p
N
v
N
v
N
v
N
r
N
q
N
p
N
v
N
v
N
v
N
N
r
q
p
z
v
y
v
x
v
r
q
p
z
v
y
v
x
v
z
y
x
z
y
x
&
&
&
&
&
&
&
&
&
&
&
&
−
−
−
−
−
−
−
−
−
−
−
−
=
1
Podstawy automatyzacji okrętu
2. Model matematyczny
14
ruch statku
T
T
T
]
,
[
2
1
η
η
η
=
T
z
y
x
]
,
,
[
=
1
η
T
]
,
,
[
2
ψ
θ
φ
=
η
T
T
T
]
,
[
2
1
v
v
v
=
T
z
y
x
v
v
v
]
,
,
[
1
=
v
T
r
q
p
]
,
,
[
2
=
v
T
T
T
]
,
[
2
1
τ
τ
τ
=
T
Z
Y
X
]
,
,
[
=
1
τ
T
N
M
K
]
,
,
[
=
2
τ
Wektor okre
ś
la pozycj
ę
i orientacj
ę
statku w układzie współrz
ę
dnych
zwi
ą
zanych z ustalonym punktem ziemi
Wektor okre
ś
la pr
ę
dko
ść
liniowa i k
ą
tow
ą
statku w układzie współrz
ę
dnych
zwi
ą
zanych z ustalonym punktem statku
Wektor okre
ś
la siły i momenty sił działaj
ą
ce w układzie współrz
ę
dnych
zwi
ą
zanych z ustalonym punktem statku
η
v
τ
nieliniowe równanie dynamiki ruchu statku:
τ
g(η
v
D(v)
v
C(v)
v
M
=
+
⋅
+
⋅
+
⋅
)
&
8
Podstawy automatyzacji okrętu
2. Model matematyczny
15
z drugiej zasady dynamiki Newtona
równania Lagrange’a
f
v
m
=
⋅
&
Q
P
L
L
dt
d
=
∂
∂
+
∂
∂
−
∂
∂
η
η
η
&
&
T
z
y
x
]
,
,
,
,
,
[
ψ
θ
φ
=
η
wektor współrz
ę
dnych uogólnionych
T
z
y
x
r
q
p
v
v
v
]
,
,
,
,
,
[
=
v
?
?!
0
=
⋅
∫
t
dt
v
2.2.2. Si
2.2.2. Si
ł
ł
y i momenty wymuszaj
y i momenty wymuszaj
ą
ą
ce wyst
ce wyst
ę
ę
puj
puj
ą
ą
ce w ruchu statku
ce w ruchu statku
S
S
S
τ
v
(v)
C
v
M
=
⋅
+
⋅
&
τ
τ
τ
τ
E
H
S
+
+
=
j.w.
Podstawy automatyzacji okrętu
2. Model matematyczny
16
ź
ródła:
•
bezwładno
ś
ci wody towarzysz
ą
cej ze statkiem
(masa tej wody, siły Coriolisa
z ni
ą
zwi
ą
zane),
•
tłumienie
: potencjalne (wynikaj
ą
ce z pochłoni
ę
cia energii przez fale
powierzchniowe powstaj
ą
ce pod wpływem ruchu statku), wywołane tarciem
powierzchniowym (statku o wod
ę
), powodowane dryfem w ruchu statku,
powodowane wirami wywołanymi ruchem statku,
•
siły stabilizuj
ą
ce
(siły ci
ęż
aru i wyporno
ś
ci).
H
τ
)
g(η
v
D(v)
v
(v)
C
v
M
τ
A
A
H
−
⋅
−
⋅
−
⋅
−
=
&
τ
τ
g(η
v
D(v)
v
C(v)
v
M
E
+
=
+
⋅
+
⋅
+
⋅
)
&
Równanie ruchu statku:
A
S
A
S
C
C
C
M
M
M
+
=
+
=
;
9
Podstawy automatyzacji okrętu
2. Model matematyczny
17
η
η
η
η
η
τ
(η
g
η
η)
(v,
D
η
η)
(v,
C
η
(η
M
=
+
⋅
+
⋅
+
⋅
)
)
&
&
&
&
v
I(η
η
⋅
=
)
&
:
)
I(η
macierz transformacji współrz
ę
dnych zwi
ą
zanych z ustalonym punktem
statku do układu współrz
ę
dnych zwi
ą
zanego z ustalonym punktem ziemi
2.2.3. Uproszczone postaci modelu ruchu statku
2.2.3. Uproszczone postaci modelu ruchu statku
Zało
ż
enia:
0
;
0
=
=
G
G
z
y
0
=
=
yz
xy
I
I
0
=
=
=
=
=
=
q
p
v
q
p
v
z
z
&
&
&
Podstawy automatyzacji okrętu
2. Model matematyczny
18
X
r
x
r
v
v
m
G
y
x
=
⋅
−
⋅
−
⋅
)
(
2
&
Y
r
x
r
v
v
m
G
x
y
=
⋅
+
⋅
+
⋅
)
(
&
&
N
r
v
v
x
m
r
I
x
y
G
z
=
⋅
+
⋅
⋅
+
⋅
)
(
&
&
.)
(
;
.
0
const
cons
v
x
=
=
τ
0
0
0
=
=
r
v
y
małe odchylenia
,
,
y
v
r
δ
N
N
Y
Y
X
X
X
r
r
v
v
v
v
v
y
y
x
x
x
∆
=
∆
=
∆
+
=
∆
=
∆
=
∆
+
=
,
,
,
,
0
0
N
r
v
v
x
m
r
I
Y
r
x
r
v
v
m
X
X
v
m
x
y
G
z
G
x
y
x
∆
=
∆
⋅
+
∆
⋅
⋅
+
∆
⋅
∆
=
∆
⋅
+
∆
⋅
+
∆
⋅
∆
+
=
∆
⋅
)
(
)
(
0
0
0
&
&
&
&
&
10
Podstawy automatyzacji okrętu
2. Model matematyczny
19
X
X
v
m
x
∆
+
=
∆
⋅
0
&
N
r
v
v
x
m
r
I
Y
r
x
r
v
v
m
x
y
G
z
G
x
y
=
⋅
+
⋅
⋅
+
⋅
=
⋅
+
⋅
+
⋅
)
(
)
(
0
0
&
&
&
&
równanie pr
ę
dko
ś
ci statku:
równania kursu statku(*):
)
,
,
,
,
(
)
,
,
,
,
(
)
,
,
,
,
,
(
R
y
y
R
y
y
R
x
y
x
r
v
r
v
N
N
r
v
r
v
Y
Y
T
v
r
v
v
X
X
δ
δ
δ
&
&
&
&
&
=
=
=
wymuszenia:
R
δ
T
wychylenie steru w kierunku zgodnym z ruchem wskazówek zegara,
napór p
ę
dnika
Podstawy automatyzacji okrętu
2. Model matematyczny
20
Model
Model
Nomoto
Nomoto
R
r
y
v
r
y
v
R
r
y
v
r
y
v
N
r
N
v
N
r
N
v
N
N
Y
r
Y
v
Y
r
Y
v
Y
Y
y
y
y
y
δ
δ
δ
δ
⋅
+
⋅
+
⋅
+
⋅
+
⋅
=
⋅
+
⋅
+
⋅
+
⋅
+
⋅
=
&
&
&
&
&
&
&
&
załó
ż
my
R
x
v
δ
⋅
=
⋅
+
⋅
b
w
N
w
M
)
(
0
&
równania kursu statku (*):
[ ]
T
y
r
v ,
=
w
=
=
=
−
⋅
⋅
−
−
⋅
−
=
=
−
−
⋅
−
⋅
−
=
2
1
22
21
12
11
0
0
0
22
21
12
11
,
)
(
,
b
b
N
Y
n
n
n
n
N
v
x
m
N
Y
v
m
Y
v
m
m
m
m
N
I
N
x
m
Y
x
m
Y
m
r
x
G
v
r
x
v
x
r
z
v
G
r
G
v
y
y
y
y
δ
δ
b
N
M
&
&
&
&
u
B
x
A
x
⋅
+
⋅
=
&
[ ]
=
=
=
−
=
=
=
−
−
21
11
22
21
12
11
,
b
b
a
a
a
a
r
v
R
T
y
b
M
B
N
M
A
u
x
1
1
δ
11
Podstawy automatyzacji okrętu
2. Model matematyczny
21
)
1
(
)
1
(
)
1
(
)
(
)
(
2
1
3
s
T
s
T
s
T
K
s
s
r
R
R
⋅
+
⋅
⋅
+
⋅
+
⋅
=
δ
N
N
N
N
M
det
det
det
det
det
21
11
11
21
3
21
11
11
21
12
21
21
12
11
22
22
11
2
1
2
1
b
m
b
m
T
K
b
n
b
n
K
m
n
m
n
m
n
m
n
T
T
T
T
R
R
⋅
−
⋅
=
⋅
⋅
−
⋅
=
⋅
−
⋅
−
⋅
+
⋅
=
+
=
⋅
(transmitancja)
Model Nomoto
Podstawy automatyzacji okrętu
2. Model matematyczny
22
R
δ
δ
ψ
0
0
Zmienne opisuj
ą
ce ruch statku w płaszczy
ź
nie poziomej
12
Podstawy automatyzacji okrętu
2. Model matematyczny
23
K
K
def
R
def
−
=
−
=
,
R
δ
δ
0
>
δ
0
>
r
0
=
=
θ
φ
r
=
ψ
&
)
(
)
(
3
2
1
2
1
δ
δ
ψ
ψ
ψ
&
&
&
&
&
&
&
⋅
+
=
+
⋅
+
+
⋅
⋅
T
K
T
T
T
T
)
1
(
)
1
(
)
1
(
)
(
)
(
2
1
3
s
T
s
T
s
s
T
K
s
s
⋅
+
⋅
⋅
+
⋅
⋅
+
=
δ
ψ
Model Nomoto 2. rz
ę
du
)
1
(
)
1
(
)
1
(
)
(
)
(
2
1
3
s
T
s
T
s
T
K
s
s
r
⋅
+
⋅
⋅
+
⋅
+
=
δ
)
1
(
)
1
(
)
1
(
)
(
)
(
2
1
s
T
s
T
s
T
K
s
s
v
v
v
y
⋅
+
⋅
⋅
+
⋅
+
=
δ
Podstawy automatyzacji okrętu
2. Model matematyczny
24
Model Nomoto 1. rz
ę
du
δ
ψ
ψ
⋅
=
+
K
T
&
&
&
)
1
(
)
(
)
(
s
T
s
K
s
s
⋅
+
⋅
=
δ
ψ
3
2
1
T
T
T
T
−
+
=
13
Podstawy automatyzacji okrętu
2. Model matematyczny
25
p
s
p
s
p
0
1
3
2
p
0
p
0
od
regulatora
od
regulatora
prawa burta
lewa burta
suwak steruj
ą
cy
suwak odcinaj
ą
cy
siłownik
ster
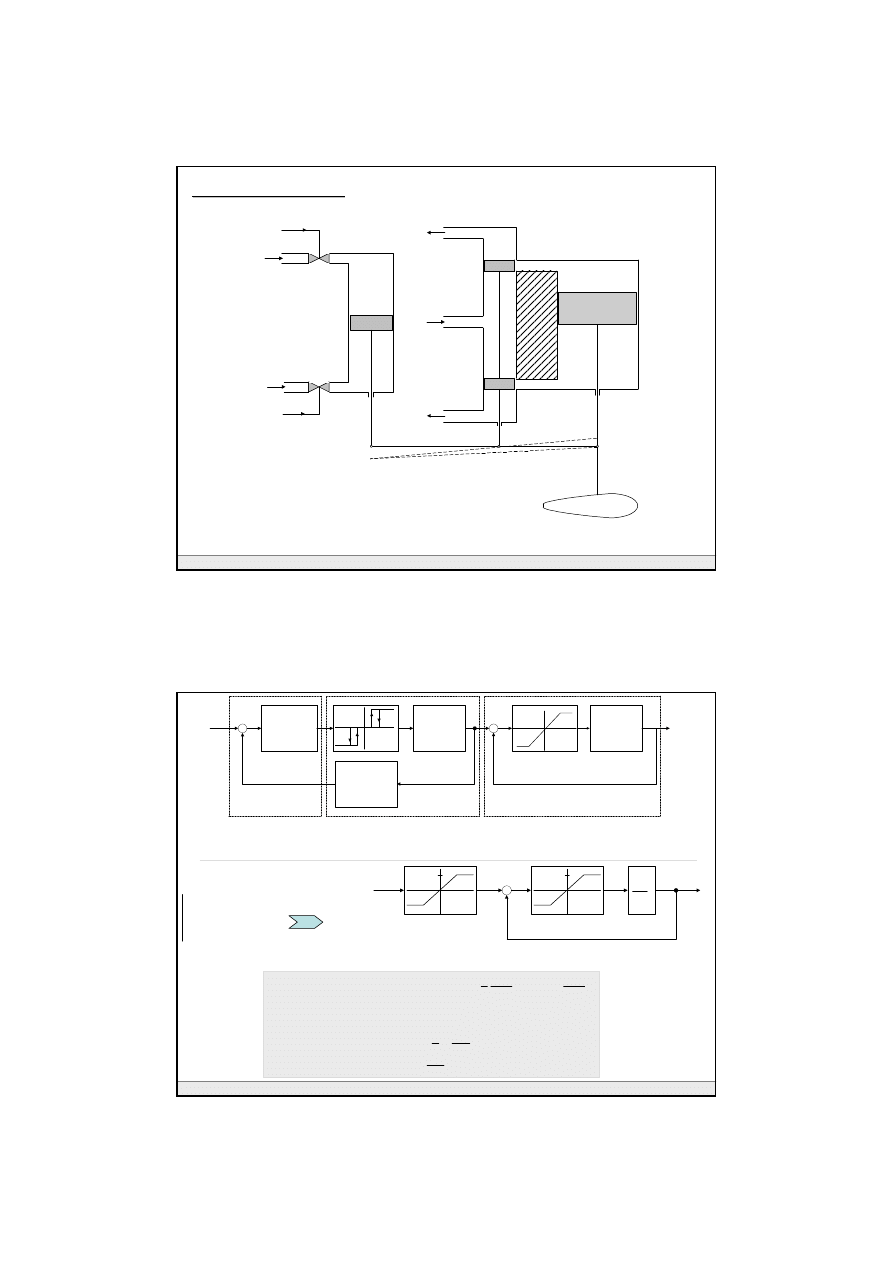
2.3. Maszyna sterowa
2.3. Maszyna sterowa
Schemat działania maszyny sterowej
Podstawy automatyzacji okrętu
2. Model matematyczny
26
Schemat blokowy układu sterowania poło
ż
enia steru
suwak steruj
ą
cy
serwomotor
algorytm
sterowania
)
1
(
s
T
s
K
R
R
⋅
+
⋅
)
1
(
s
T
s
K
S
S
⋅
+
⋅
przetwornik
połozenie
liniowe / k
ą
towe
δ
c
+
-
+
-
δ
człon kształtuj
ą
cy sygnału
steruj
ą
cego
suwak steruj
ą
cy:
człon proporcjonalny
0
≈
S
T
.
max
δ
&
.
max
δ
c
δ
δ
&
s
K
S
δ
-
+
od regulatora
kursu
ogranicznik
poło
ż
enia steru
ogranicznik przesterowania
pr
ę
dko
ś
ci steru
Uproszczony schemat blokowy maszyny sterowej
s
s
.
deg
7
.
deg
3
1
2
;
.
deg
35
max
max
<
<
=
δ
δ
&
s
L
v
.
deg
,
9
,
132
min
=
δ
&
s
t
30
35
≤
s
.
deg
20
15
÷
≡
δ
&
wymaganie TK
ograniczenia
w zale
ż
no
ś
ci od
parametrów statku
nowe szybkie statki
14
Podstawy automatyzacji okrętu
2. Model matematyczny
27
PRS:
PRS:
Urz
ą
dzenie sterowe przy nap
ę
dzie główn
ą
maszyn
ą
sterow
ą
powinno zapewni
ć
przeło
ż
enie steru lub dyszy
obrotowej z wychylenia
35°
na jedn
ą
burt
ę
do wychylenia
35°
na drug
ą
burt
ę
, gdy statek jest zanurzony do letniej
wodnicy ładunkowej i porusza si
ę
naprzód z maksymaln
ą
pr
ę
dko
ś
ci
ą
eksploatacyjn
ą
, oraz zapewni
ć
w tych samych
warunkach mo
ż
liwo
ść
przeło
ż
enia steru lub dyszy
obrotowej z wychylenia
35°
na jedn
ą
burt
ę
do wychylenia
30°
na drug
ą
burt
ę
w czasie nie przekraczaj
ą
cym
28 s
przy
działaniu na trzon sterowy znamionowym momentem
obrotowym maszyny.
Wyszukiwarka
Podobne podstrony:
Automatyka dynamiakPAOo 2
Automatyka dynamiakPAOo 2
układ dynamiczny automaty
AUTOMATYKA, Liniowe modele dynamiczne i sposoby ich opisu, Nr ?wiczenia :
Cwiczenie 1 moje - obiekt dynamiczny linowy, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, A
BADANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH REGULATORÓW PID, SGGW Technika Rolnicza i Leśna, Auto
Dynamika, Politechnika Opolska, sprawozdania, zachomikowane, Automatyka
Wykład 2009 2010 dynamika, Automatyka i Robotyka, SEMESTR 5, NEMAR, Nemar stary, nemar, nemar DUŻO,
BADANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH REGULATORÓW PID 2, SGGW Technika Rolnicza i Leśna, Au
obliczenia do robota, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatoró
syposz,podstawy automatyki, PODSTAWOWE CZŁONY DYNAMICZNE
Modelowanie układów dynamicznych na elektronicznej maszynie analogowej, STUDIA - Kierunek Transport,
Kinematyka odwrotna, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatorów
Wykład 2010 2011 dynamika, Automatyka i Robotyka, SEMESTR 5, NEMAR, Nemar stary, nemar, nemar DUŻO,
Ident. obiektu dynamicznego nr2, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
więcej podobnych podstron