
Poruszane zagadnienia:
1.
Transmisyjne media bezprzewodowe.
2.
Zło
ż
ono
ść
zagadnienia kinematyki odwrotnej.
3.
Odsprz
ęż
enie kinematyczne.
4.
Kinematyka odwrotna pozycji – podej
ś
cie geometryczne.
5.
Kinematyka odwrotna orientacji,
Kinematyka odwrotna:
Rozwi
ą
zanie zadania kinematyki odwrotnej, sprowadza si
ę
do
wyznaczenia macierzy przekształcenia H (4
×
4), postaci
)
3
(
1
E
∈
=
0
d
R
H
Wyznaczenie tej macierzy polega na znalezieniu (jednego, b
ą
d
ź
wszystkich) rozwi
ą
za
ń
równania:
n
n
n
q
q
q
q
A
A
T
gdzie
H
T
⋅
⋅
=
=
...
)
,...,
(
)
,...,
(
1
6
1
0
6
1
0
Powy
ż
sze równanie daje 12 nieliniowych (nietrywialnych – gdy
ż
dolne wiersze
macierzy R i H to: (0, 0, 0, 1)) równa
ń
, które mo
ż
na zapisa
ć
4
3
2
1
3
2
1
)
,...,
(
,
6
1
,
,
,
; j
,
,
i
gdzie
h
q
q
j
i
i,j
=
=
=
T
Zło
ż
ono
ść
zagadnienia kinematyki odwrotnej:
Podczas rozwi
ą
zywania zadania kinematyki odwrotnej, jeste
ś
my zaintere-
sowani znalezieniem zamkni
ę
tej postaci rozwi
ą
zania równa
ń
, a nie rozwi
ą
-
zaniami numerycznymi, gdy
ż
:
w pewnych zastosowaniach, równania kinematyki odwrotnej musz
ą
by
ć
rozwi
ą
zywane bardzo szybko;
maj
ą
c rozwi
ą
zanie w postaci zamkni
ę
tej, mo
ż
na przygotowa
ć
zasady
wyboru konkretnych rozwi
ą
za
ń
spo
ś
ród wielu istniej
ą
cych.
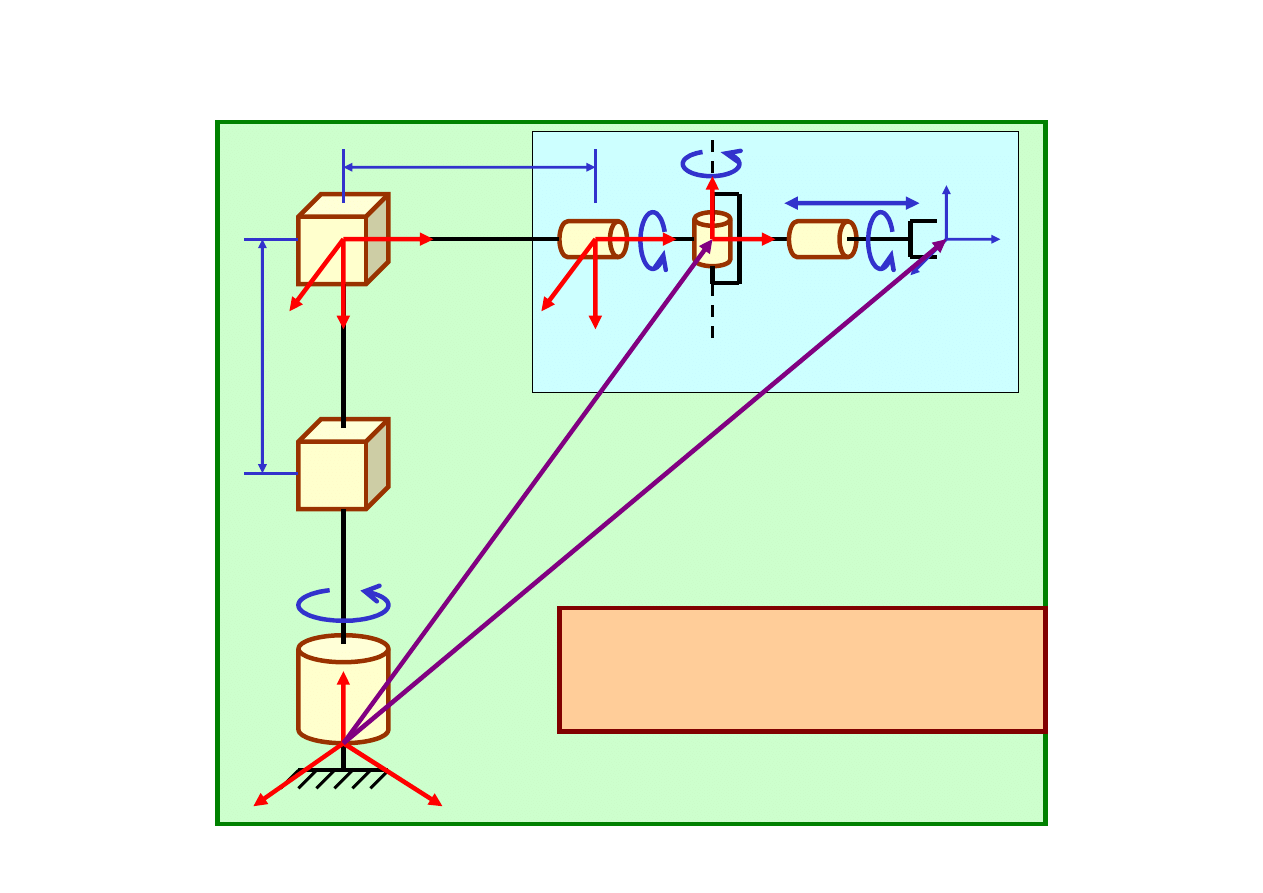
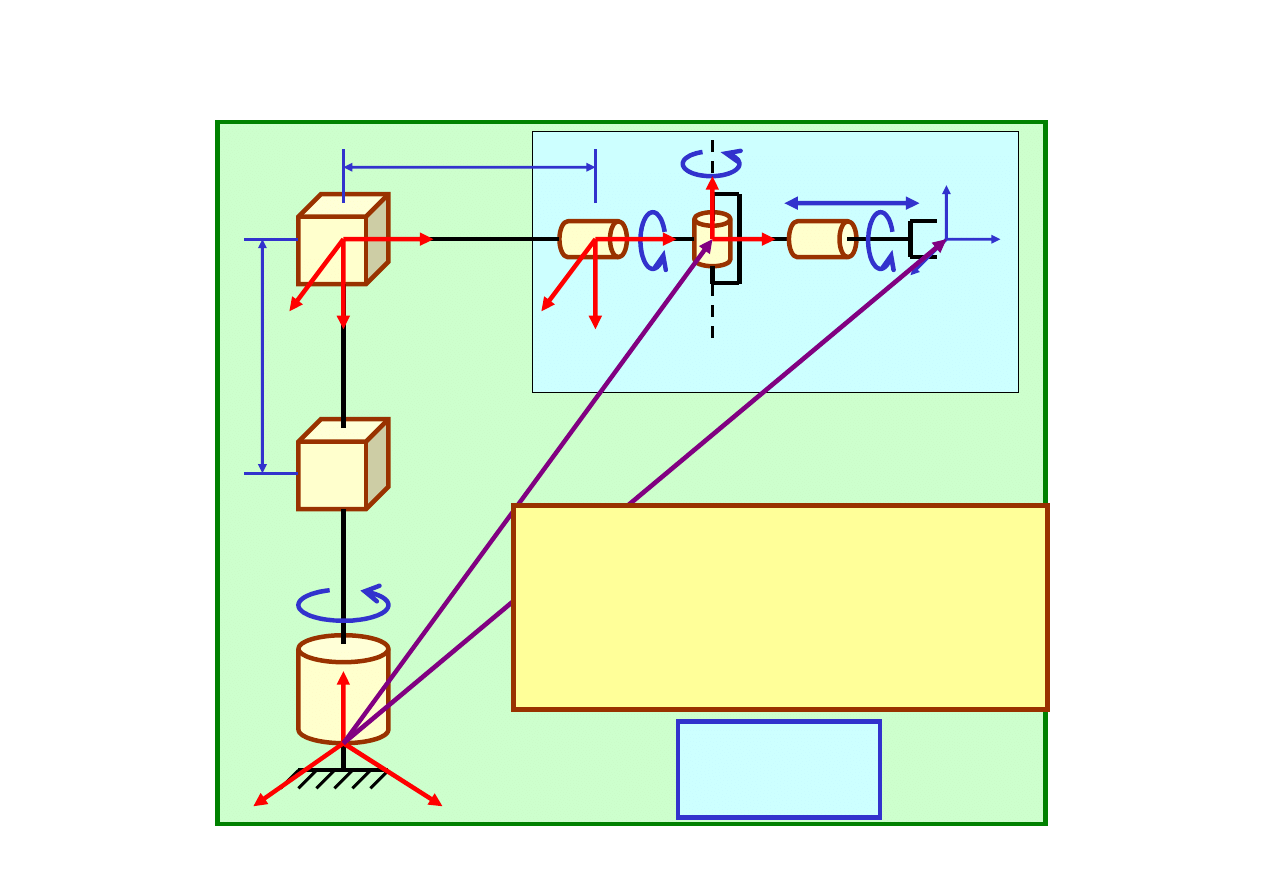
Przykład. Manipulator stanfordzki
=
⋅
⋅
⋅
⋅
⋅
=
1
0
0
0
33
32
31
23
22
21
13
12
11
6
5
4
3
2
1
6
0
z
y
x
d
r
r
r
d
r
r
r
d
r
r
r
A
A
A
A
A
A
T
W celu znalezienia zmiennych przegubowych:
ϕ
1
,
ϕ
2
,
ϕ
3
,
ϕ
4
,
ϕ
5
,
ϕ
6
, nale
ż
y
tutaj rozwi
ą
za
ć
skomplikowany układ równa
ń
trygonometrycznych.
Układ równa
ń
trygonometrycznych niezb
ę
dnych do wyznaczenia
zmiennych przegubowych robota stanfordzkiego:
=
−
+
=
+
+
+
+
=
−
+
+
−
=
+
−
=
+
+
=
−
+
=
+
+
=
+
−
+
+
+
−
=
+
−
−
+
+
−
=
−
−
−
=
+
+
−
−
=
+
−
−
−
z
y
x
d
s
s
c
c
c
d
c
d
d
s
s
c
s
s
c
c
s
s
c
d
c
d
s
s
d
d
s
s
s
s
c
c
s
c
c
c
d
s
d
s
c
d
r
c
c
s
c
s
r
s
s
c
c
s
s
c
c
s
r
s
s
s
c
s
s
c
c
c
r
s
s
c
c
s
s
c
c
s
r
c
c
s
c
s
c
s
s
s
c
s
s
c
c
c
s
r
c
c
s
c
s
s
s
s
s
c
s
s
c
c
c
c
r
c
s
c
s
s
c
c
c
s
r
s
c
c
c
s
c
c
s
s
s
s
c
c
c
c
s
r
s
c
c
c
s
s
c
s
s
s
s
c
c
c
c
c
)
(
)
(
)
(
)
(
)
(
)
(
)
(
]
)
(
[
)
(
]
)
(
[
)
(
)
(
]
)
(
[
)
(
]
)
(
[
5
2
4
5
2
6
2
3
2
1
5
5
1
4
2
5
4
1
6
1
2
2
1
3
5
4
1
2
5
1
5
4
2
1
6
1
2
2
1
3
33
5
2
5
4
2
23
5
4
1
5
2
5
4
2
1
13
5
4
1
5
2
5
4
2
1
32
6
5
2
6
4
6
5
4
2
22
6
4
6
5
4
1
6
5
2
6
4
6
5
4
2
1
12
6
4
6
5
4
1
6
5
2
6
4
6
5
4
2
1
31
6
5
2
6
4
6
5
4
2
21
6
4
6
5
4
1
6
5
2
6
4
6
5
4
2
1
11
6
4
6
5
4
1
6
5
2
6
4
6
5
4
2
1
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
a
n
s
d
2
d
3
ϕ
6
ϕ
5
ϕ
4
ϕ
1
y
3
z
3
x
3
O
3
z
2
y
2
x
2
O
2
z
4
z
5
z
0
y
0
x
0
d
0
c
d
0
n
d
6
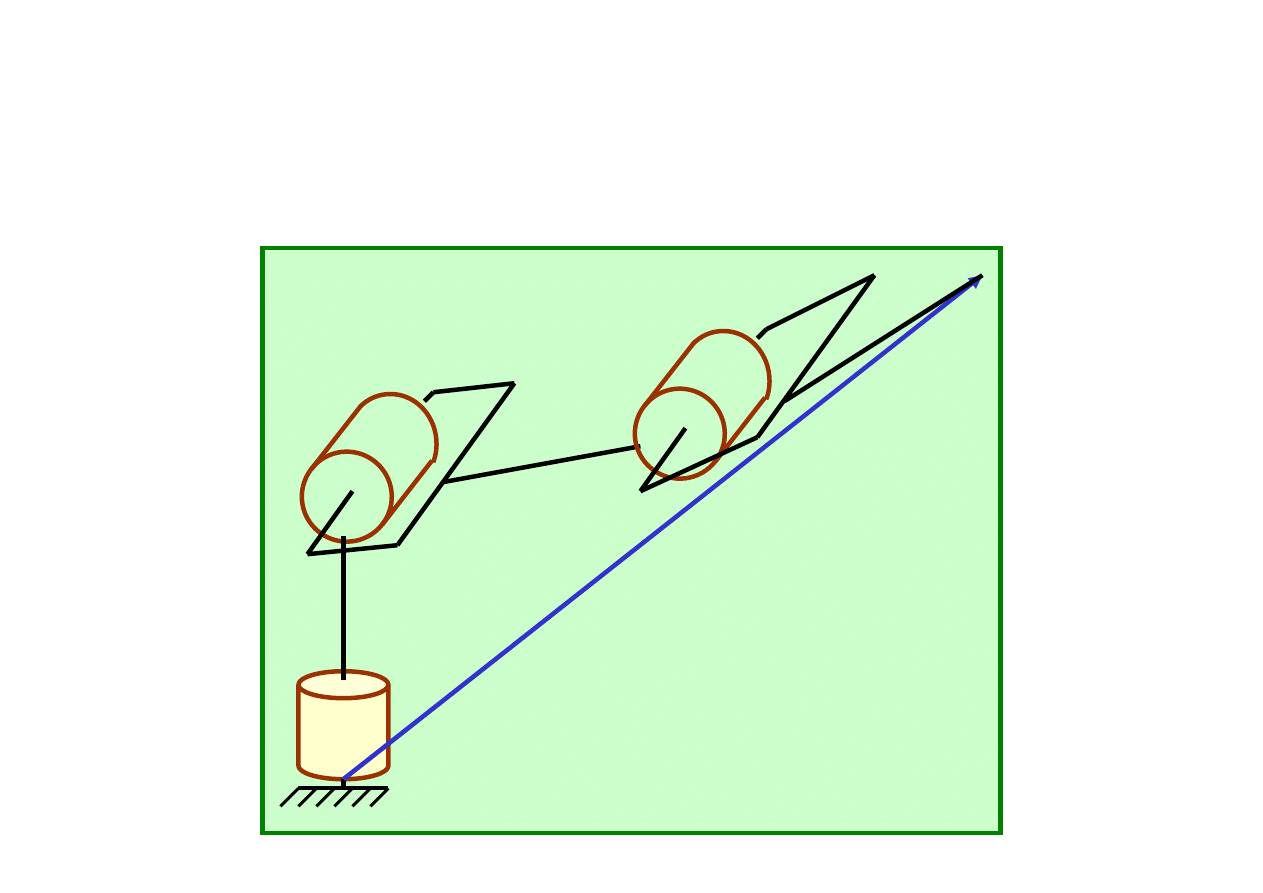
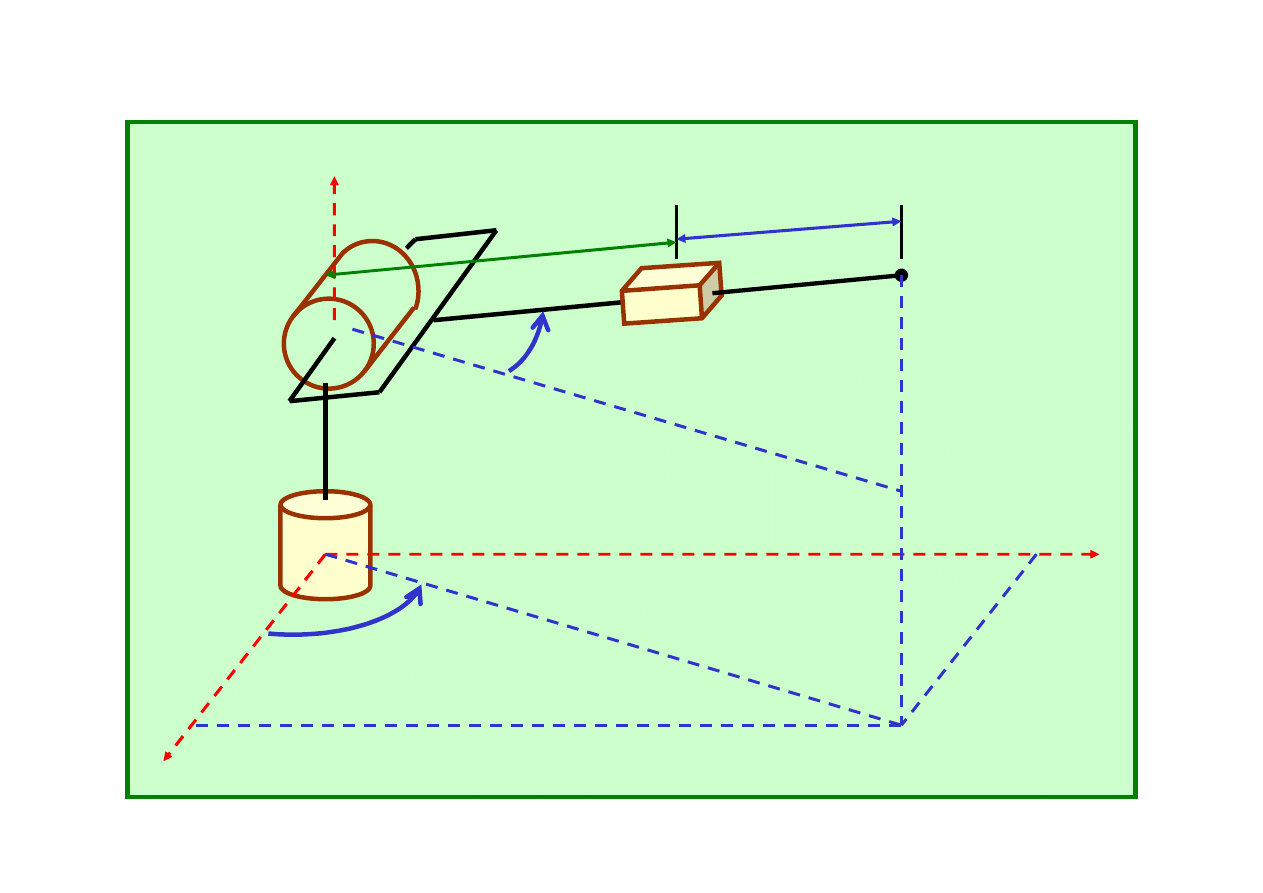
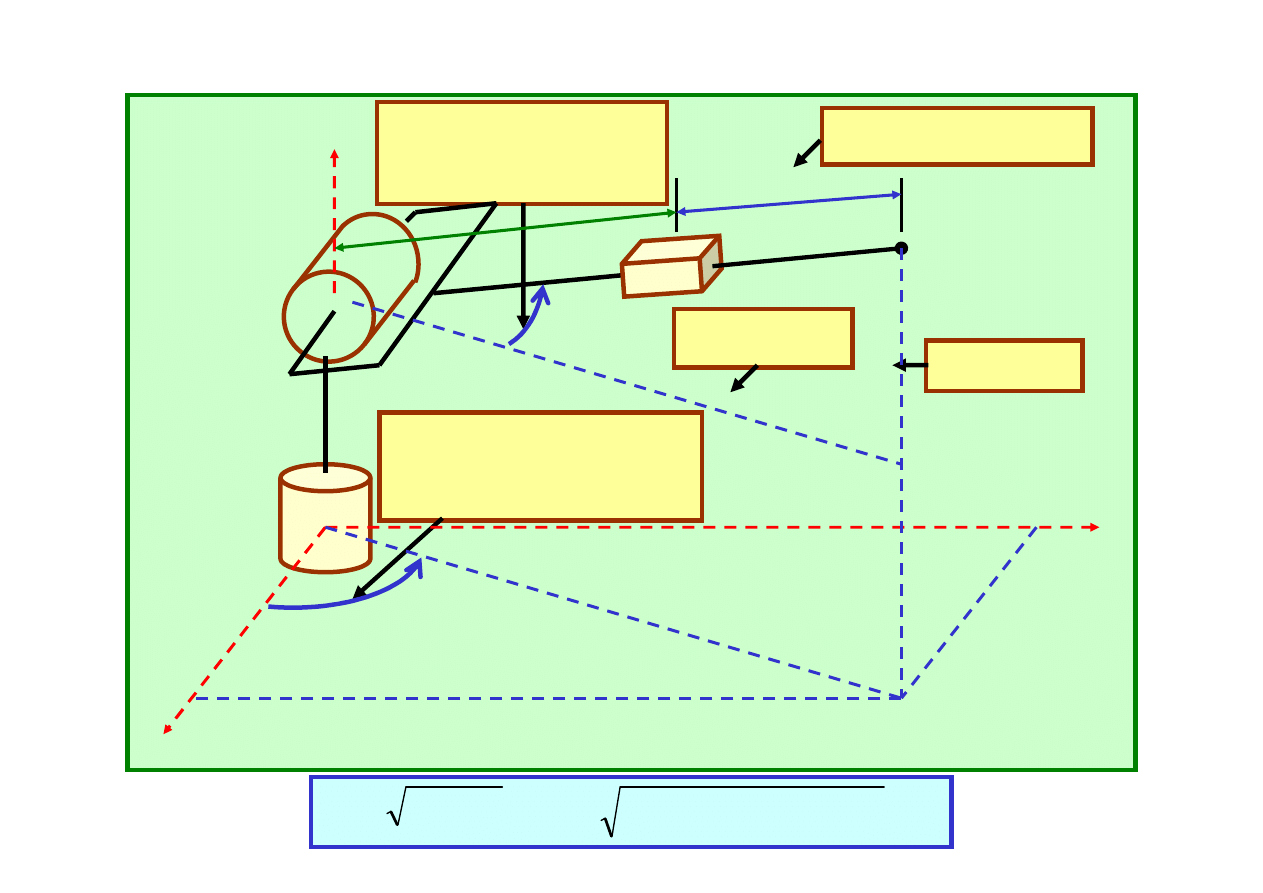
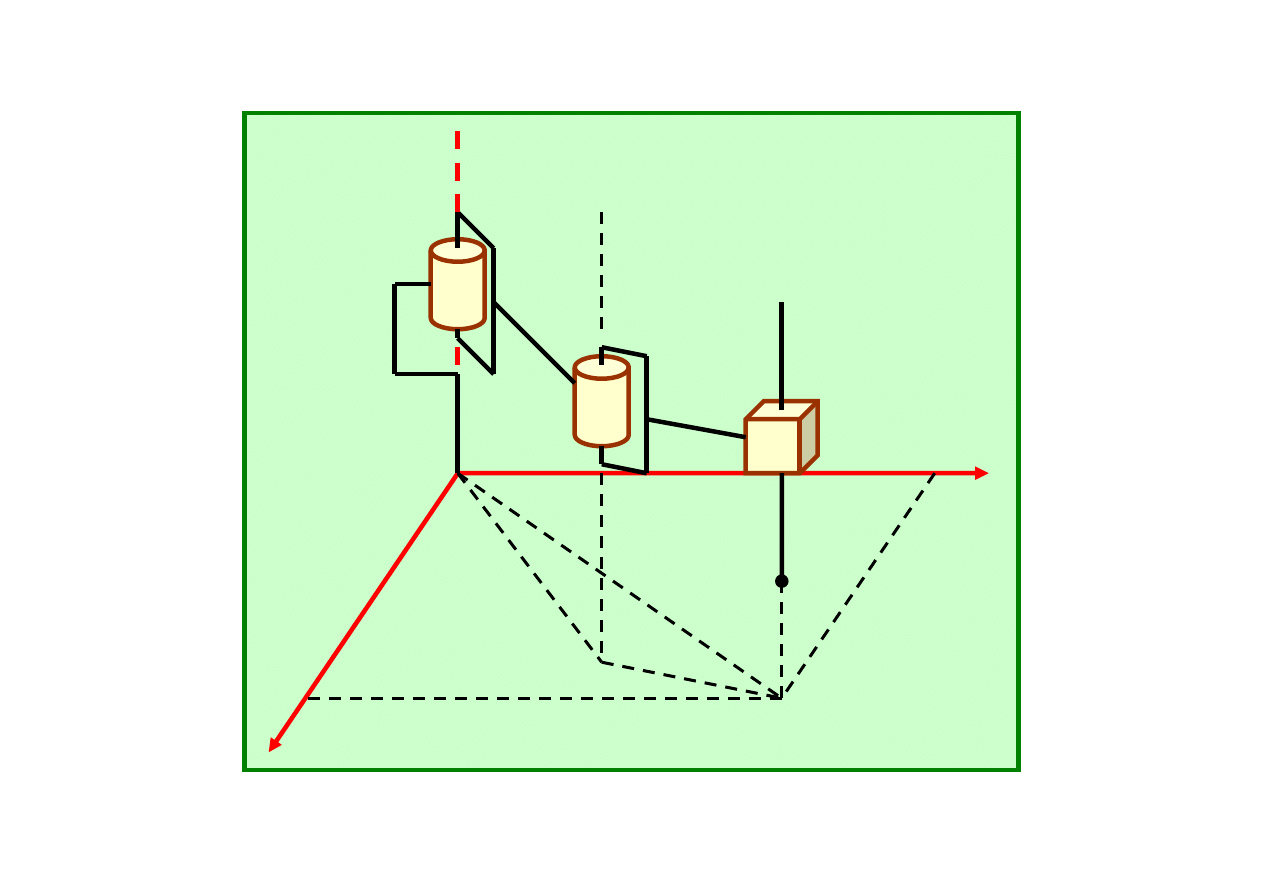
Rozwa
ż
my manipulator o sze
ś
ciu
stopniach swobody (np. manipula-
tor stanfordzki).
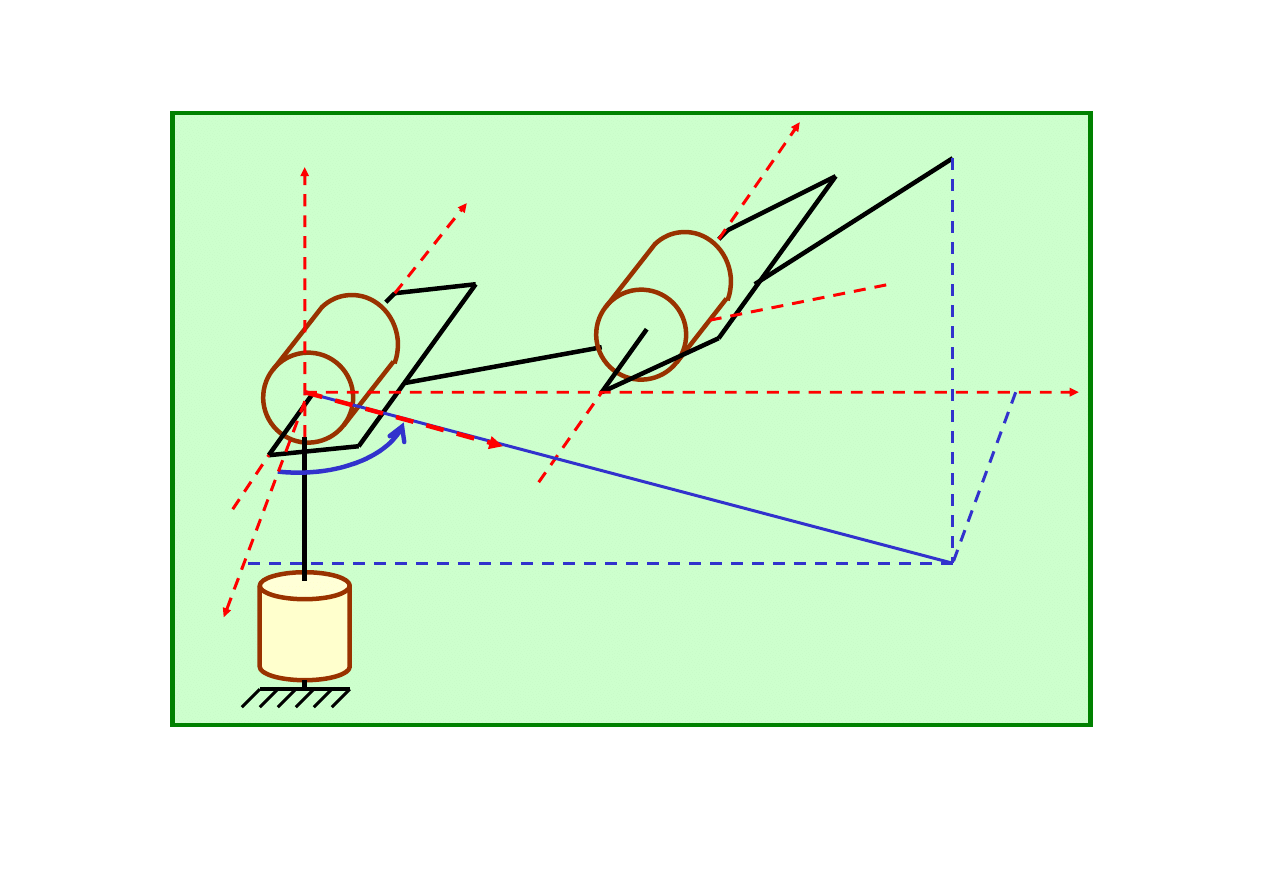
Odsprz
ęż
enie kinematyczne
a
n
s
d
2
d
3
ϕ
6
ϕ
5
ϕ
4
ϕ
1
y
3
z
3
x
3
O
3
z
2
y
2
x
2
O
2
z
4
z
5
z
0
y
0
x
0
d
0
c
d
0
n
d
d
oraz
R
R
:
równa
ń
dwóch
postaci
w
H
T
zale
ż
no
ść
wyrazimy
=
=
=
)
,...,
(
)
,...,
(
)
,...,
(
6
1
6
0
6
1
6
0
6
1
0
q
q
q
q
q
q
n
d
6
Rk
d
p
:
zatem
6
d
c
−
=
Analiza przypadku
Je
ś
li współrz
ę
dne wektora d oznaczy
ć
odpowiednio: d
x
, d
y
, d
z
,
a współrz
ę
dne wektora p
c
przez p
x
, p
y
, p
z
, to:
−
−
−
=
33
6
23
6
13
6
r
d
d
r
d
d
r
d
d
p
p
p
z
y
x
z
y
x
teraz, gdy mo
ż
liwe jest ju
ż
wyznaczenie 3 pierwszych zmiennych
przegubowych, korzystaj
ą
c z wyra
ż
enia
6
3
3
0
R
R
R
⋅
=
okre
ś
lamy orientacj
ę
ko
ń
cówki robota wzgl
ę
dem układu O
3
x
3
y
3
z
3
(na podstawie której wyznaczamy 3 pozostałe k
ą
ty przegubowe,
jako zbiór k
ą
tów Eulera odpowiadaj
ą
cych przekształceniu R
3
6
):
( )
( )
R
R
R
R
R
⋅
=
⋅
=
−
T
3
0
1
3
0
6
3
Algorytm realizacji powy
ż
szego zadania:
Krok 1. Znale
źć
zmienne przegubowe q
1
, q
2
, q
3
takie,
ż
e
ś
rodek ki
ś
ci
o wektorze p
c
jest zlokalizowany równaniem:
Krok 2. Wykorzystuj
ą
c zmienne przegubowe wyznaczone w kroku 1,
obliczy
ć
macierz przekształcenia R
0
3
.
Krok 3. Znale
źć
zestaw k
ą
tów Eulera odpowiadaj
ą
cych macierzy obrotu
R
3
6
na podstawie wzoru:
Rk
d
p
6
d
c
−
=
( )
( )
R
R
R
R
R
⋅
=
⋅
=
−
T
3
0
1
3
0
6
3
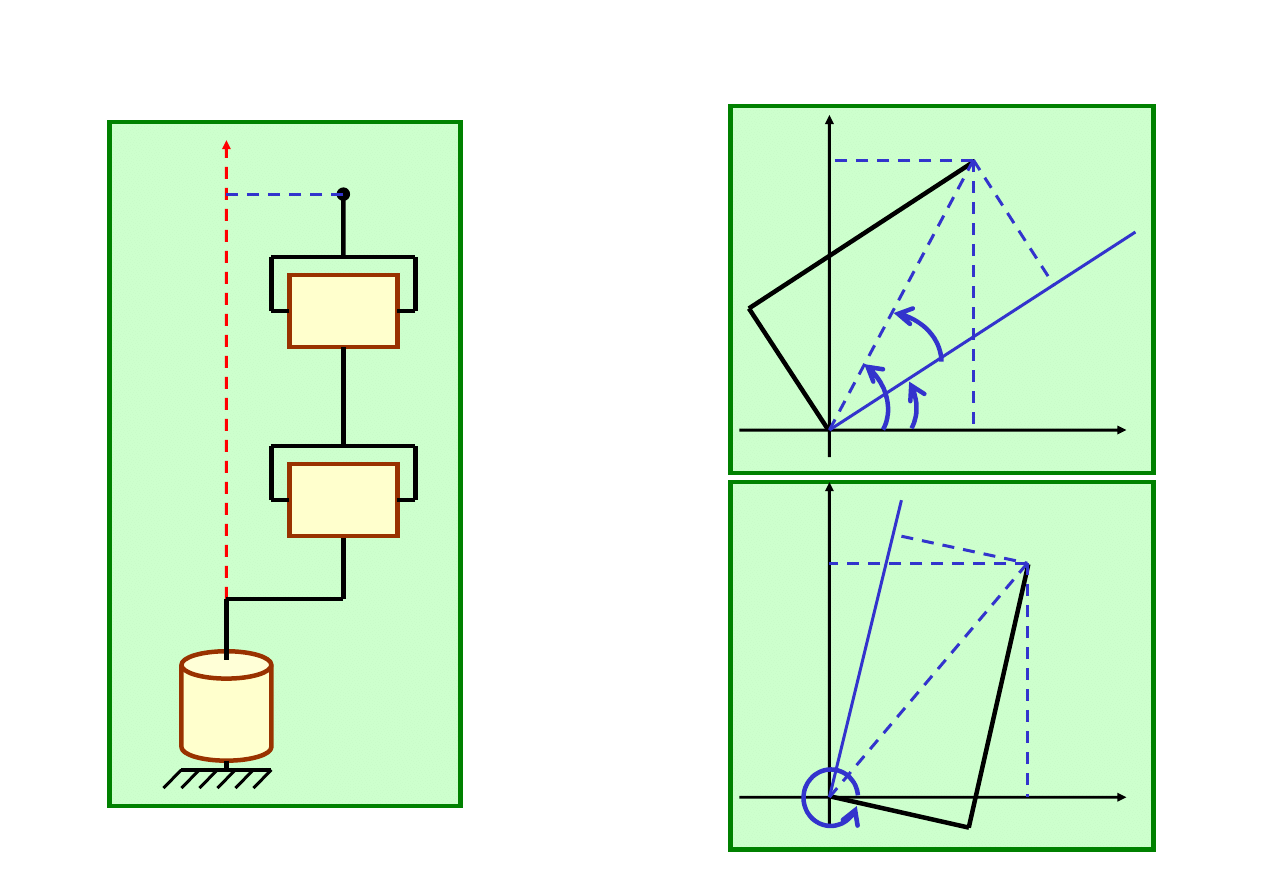
Kinematyka odwrotna pozycji – podej
ś
cie
geometryczne
Manipulator z łokciem – konfiguracja stawowa
p
c
p
c
= [p
x
, p
y
, p
z
]
T
Rzutowanie wektora p
c
na płaszczyzn
ę
x
0
y
0
z
2
P
y
P
x
S
z
r
x
0
y
0
x
1
z
1
z
0
ϕ
1
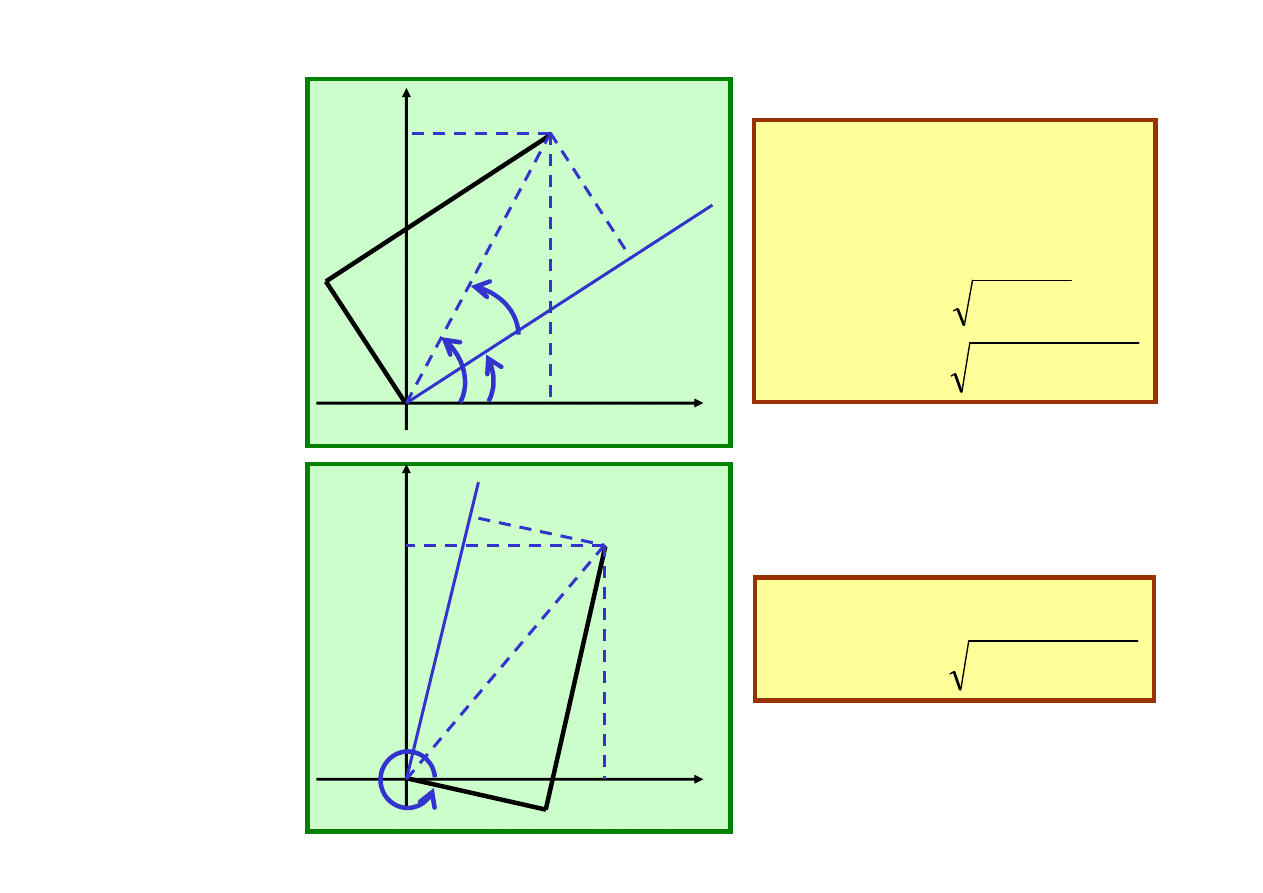
Zatem rzut
ś
rodka ki
ś
ci na płaszczyzn
ę
x
0
y
0
przedstawia si
ę
nast
ę
puj
ą
co:
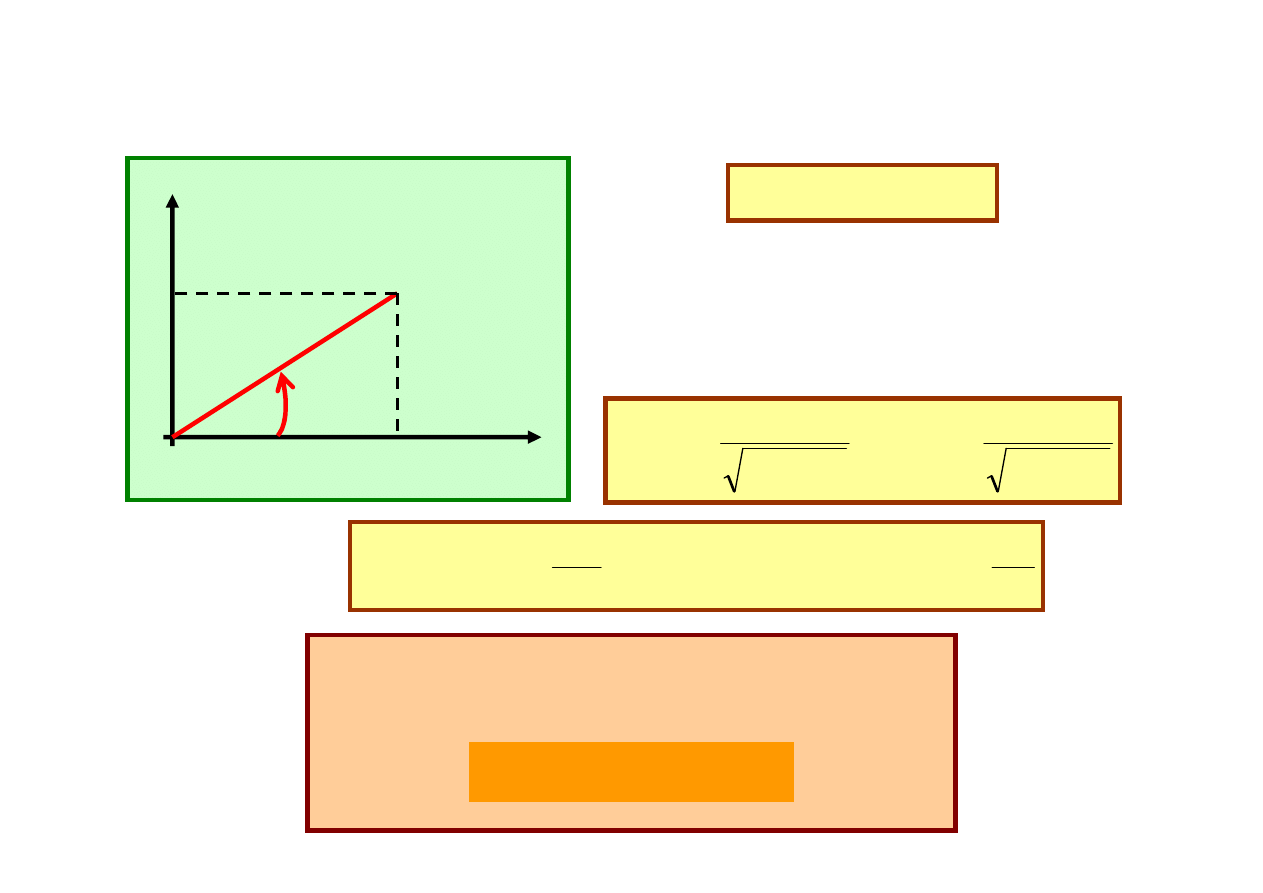
ϕ
1
r
x
0
y
0
p
y
p
x
)
,
arctan(
1
y
x
p
p
=
ϕ
gdzie arctan(x,y) ozn. dwuargumentow
ą
funkcj
ę
arcus tangens zdefiniowan
ą
dla
wszystkich (x,y)
≠
0, wyznaczaj
ą
c
ą
jed-
noznacznie k
ą
t
ϕ
taki,
ż
e:
2
2
2
2
sin
,
cos
y
x
y
y
x
x
+
=
+
=
ϕ
ϕ
Na przykład:
4
3
)
1
,
1
arctan(
,
4
)
1
,
1
arctan(
π
π
=
−
−
=
−
natomiast
Jednocze
ś
nie nale
ż
y zauwa
ż
y
ć
,
ż
e drugim do-
puszczalnym rozwi
ą
zaniem dla k
ą
ta
ϕ
1
jest:
)
,
arctan(
1
y
x
p
p
+
=
π
ϕ
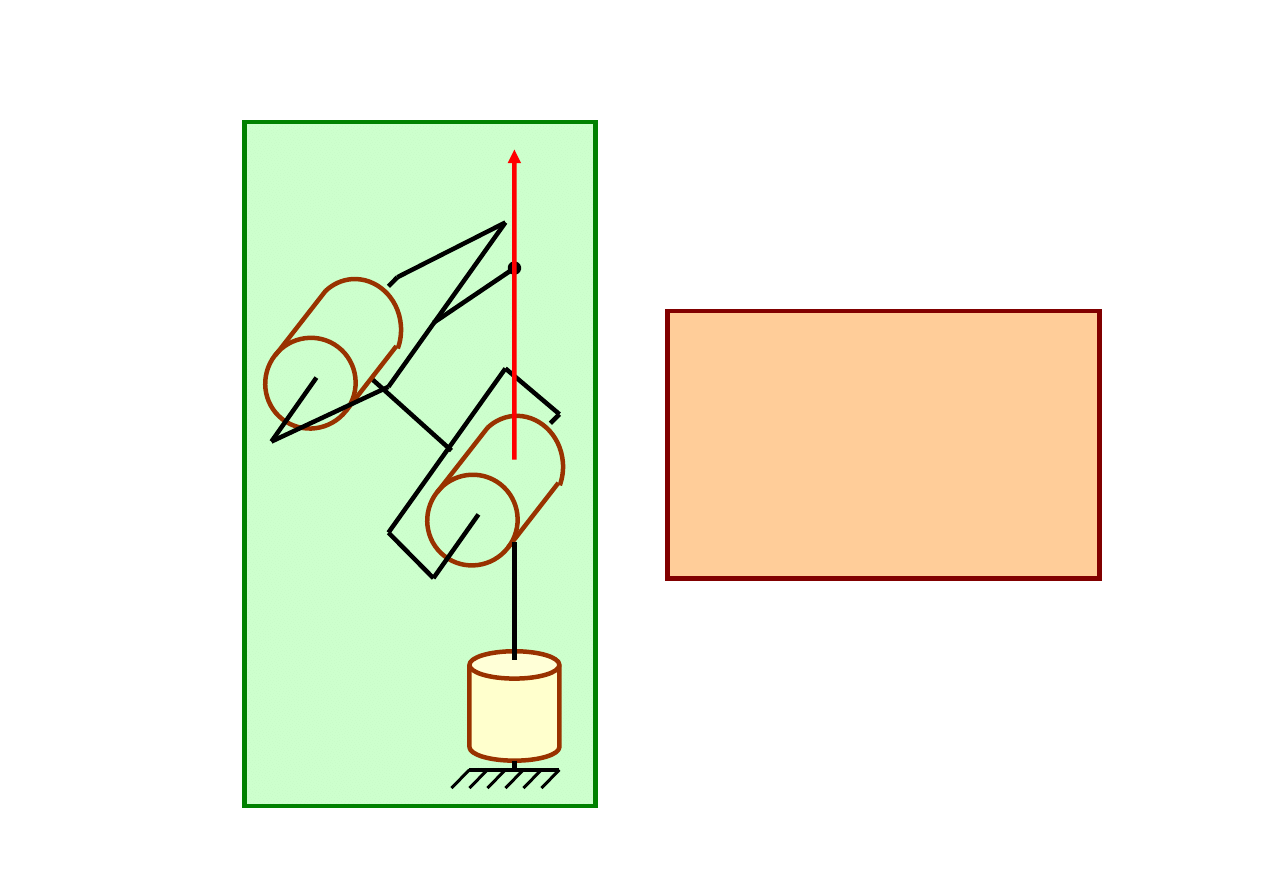
Pozycja osobliwa manipulatora (p
x
= p
y
= 0)
z
0
W pozycji nieosobliwej
ś
rodek
ki
ś
ci opisany wektorem p
c
le
ż
y
na osi z
0
, a wi
ę
c dla ka
ż
dej
warto
ś
ci k
ą
ta
ϕ
1
poło
ż
enie
ś
rodka jest stałe. Mamy wi
ę
c
do czynienia z niesko
ń
czon
ą
liczb
ą
rozwi
ą
za
ń
dla
ϕ
1
.
Manipulator z łokciem z przesuni
ę
tym barkiem
z
0
d
1
p
x
r
α
φ
ϕ
1
d
1
x
0
y
0
p
x
r
ϕ
1
d
1
x
0
y
0
Konfiguracja
lewego
ramienia
Konfiguracja
prawego
ramienia
p
y
p
y
Konfiguracja
lewego
ramienia:
p
x
r
α
φ
ϕ
1
d
1
x
0
y
0
(
)
(
)
2
1
2
2
1
2
1
2
1
1
1
,
arctan
,
arctan
)
,
arctan(
d
p
p
d
d
r
d
p
p
y
x
y
x
−
+
=
=
−
=
=
−
=
gdzie
α
ϕ
α
φ
ϕ
p
y
Konfiguracja
lewego
ramienia:
p
x
r
ϕ
1
d
1
x
0
y
0
p
y
(
)
2
1
2
2
1
1
,
arctan
)
,
arctan(
d
p
p
d
p
p
y
x
y
x
−
+
−
−
=
ϕ
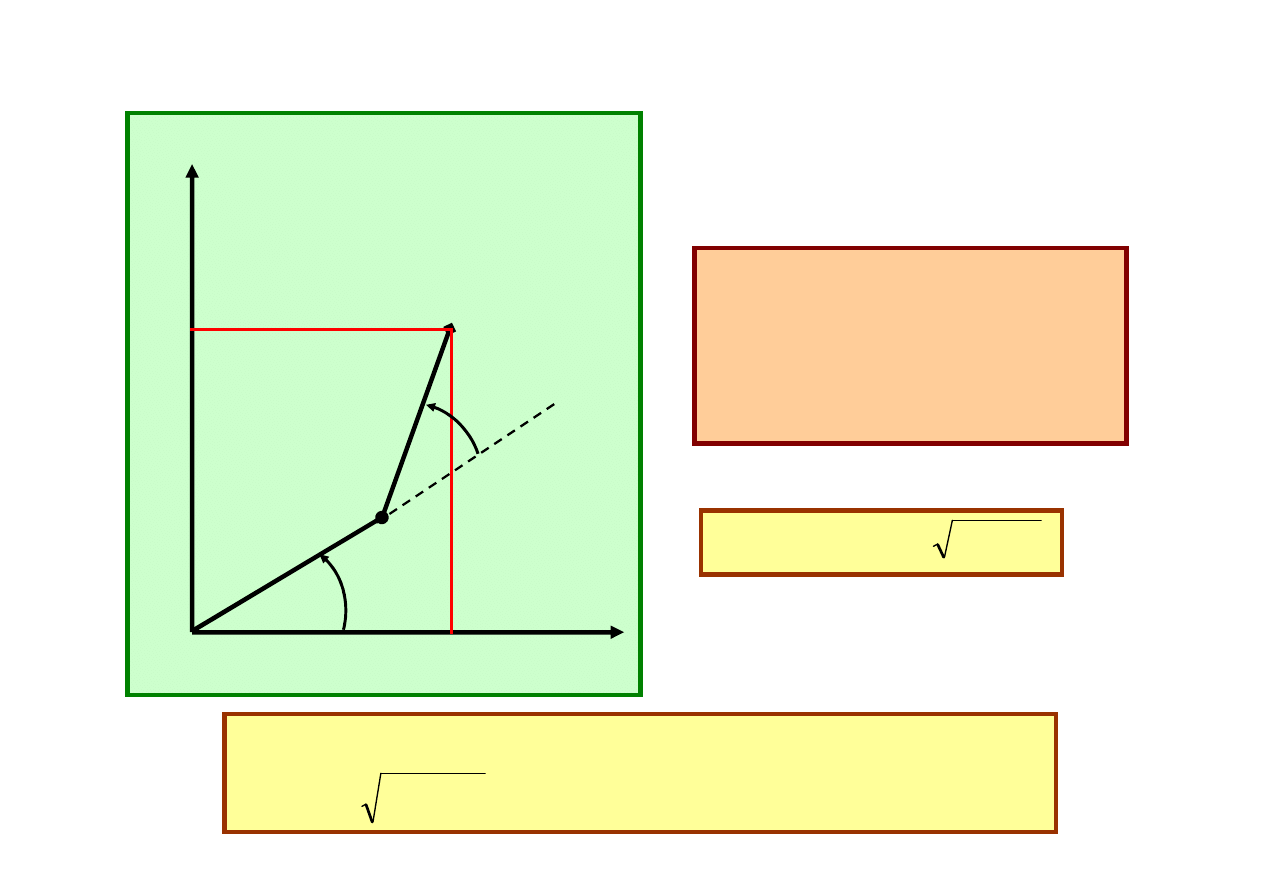
Wyznaczenie k
ą
tów
ϕ
2
i
ϕ
3
manipulatora:
x
0
y
0
s
r
ϕ
2
ϕ
3
a
2
a
3
)
1
,
arctan(
2
3
M
M
−
±
=
ϕ
)
sin
,
cos
arctan(
)
,
arctan(
)
sin
,
cos
arctan(
)
,
arctan(
3
3
3
3
2
1
2
2
3
3
3
3
2
2
ϕ
ϕ
ϕ
ϕ
ϕ
a
a
a
d
p
p
p
a
a
a
s
r
z
y
x
+
−
−
+
=
=
+
−
=
Na mocy wzorów wyprowa-
dzonych na wykładzie pierw-
szym,
dla
dwuczłonowego
mechanizmu płaskiego, otrzy-
mujemy:
oraz
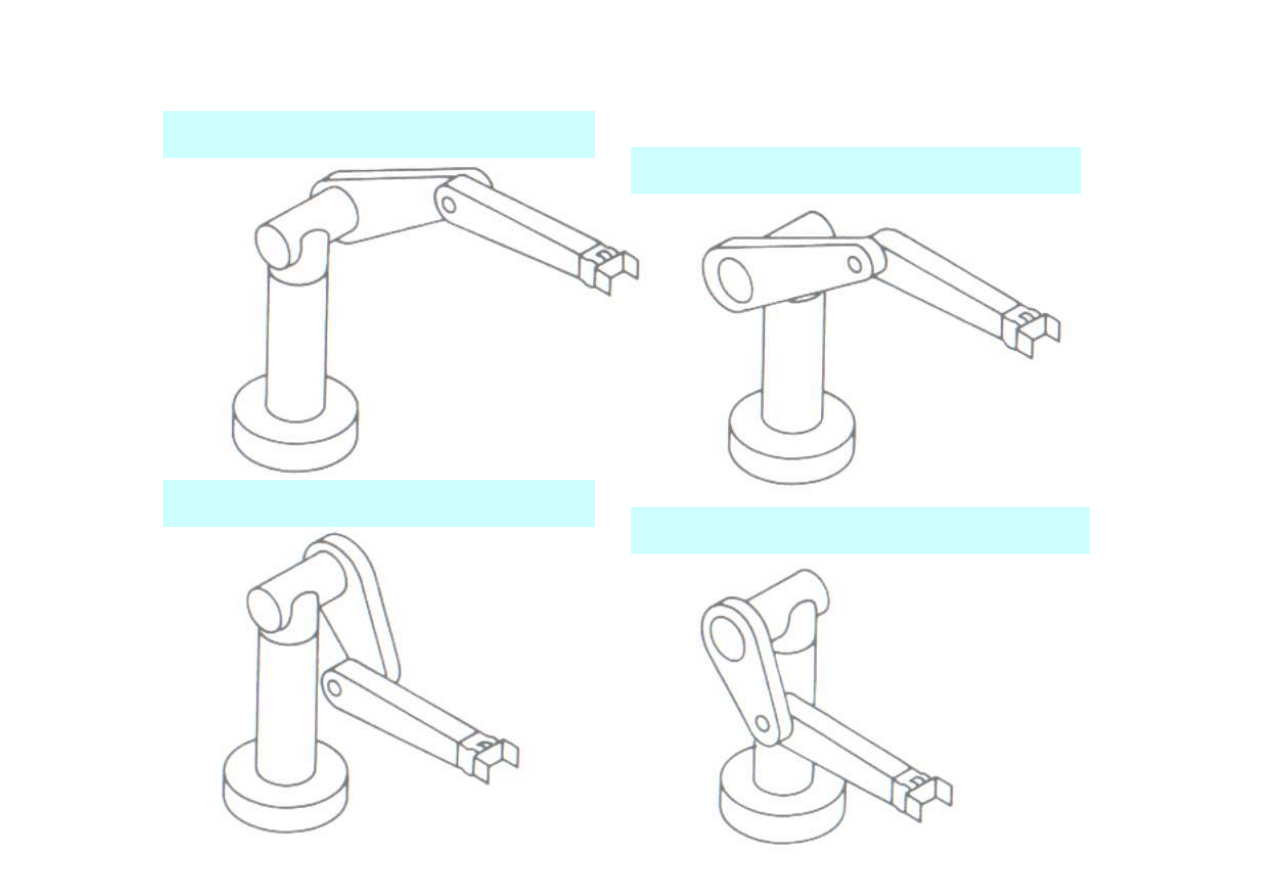
Manipulator z łokciem z przesuni
ę
ciem – robot PUMA
Rami
ę
z lewej strony u góry
Rami
ę
z prawej strony u góry
Rami
ę
z lewej strony u dołu
Rami
ę
z prawej strony u dołu
Konfiguracja sferyczna – manipulator sferyczny
x
0
z
0
ϕ
1
y
0
ϕ
2
r
s
d
1
d
3
p
x
p
z
p
y
a
2
Analiza manipulatora sferycznego
)
,
arctan(
)
,
arctan(
1
1
y
x
y
x
p
p
p
p
+
=
=
π
ϕ
ϕ
)
,
arctan(
)
,
arctan(
2
2
s
r
s
r
−
=
=
π
ϕ
ϕ
2
2
2
y
x
p
p
r
+
=
1
d
p
s
z
−
=
x
0
z
0
ϕ
1
y
0
ϕ
2
r
s
d
1
d
3
p
x
p
z
p
y
a
2
2
2
2
2
3
)
(
s
r
a
d
+
=
+
2
2
1
2
2
2
2
2
3
)
(
a
d
p
p
p
a
s
r
d
z
y
x
−
−
+
+
=
−
+
=
Kinematyka odwrotna orientacji – znajdowanie
k
ą
tów Eulera odpowiadaj
ą
cych macierzy obrotu R
W celu wyznaczenia k
ą
tów Eulera
αααα
,
ββββ
,
γγγγ
(w przypadku ki
ś
ci
sferycznej), nale
ż
y rozwi
ą
za
ć
równanie macierzowe postaci:
=
−
+
−
+
−
−
−
33
32
31
23
22
21
13
12
11
u
u
u
u
u
u
u
u
u
c
s
s
c
s
s
s
c
c
s
c
s
s
c
c
c
s
s
c
c
s
s
c
c
s
s
c
c
c
β
γ
β
γ
β
β
α
γ
α
γ
β
α
γ
α
γ
β
α
β
α
γ
α
γ
β
α
γ
α
γ
β
α
)
1
,
arctan(
lub
)
1
,
arctan(
1
1
0
.
2
)
0
0
(
0
0
.
1
2
33
33
2
33
33
2
33
33
33
23
13
23
13
23
13
u
u
u
u
u
s
u
c
u
u
u
u
u
s
u
u
−
−
=
−
=
−
±
=
=
±
=
⇒
=
∧
=
∨
=
∧
≠
⇒
≠
∧
β
β
β
β
β
zatem
a
:
i
Je
ś
li wybierzemy pierwsz
ą
warto
ść
k
ą
ta
ββββ
, wówczas s
ββββ
> 0 oraz:
−
=
=
)
,
arctan(
)
,
arctan(
32
31
23
13
u
u
u
u
γ
α
Je
ś
li wybierzemy za
ś
drug
ą
warto
ść
k
ą
ta
ββββ
, wówczas s
ββββ
< 0 oraz:
−
=
−
−
=
)
,
arctan(
)
,
arctan(
32
31
23
13
u
u
u
u
γ
α
Je
ś
li natomiast u
13
= u
23
= 0, to fakt
ż
e macierz U jest ortogonalna impliku-
je równo
ś
ci u
33
=
±±±±
1 i u
31
= u
32
= 0, co oznacza,
ż
e macierz U jest postaci:
±
=
1
0
0
0
0
22
21
12
11
u
u
u
u
U
Je
ś
li u
33
= 1, wtedy c
ββββ
= 1 i s
ββββ
= 0, czyli
ββββ
= 0, a zatem równanie
macierzowe, które nale
ż
y rozwi
ą
za
ć
jest postaci:
=
+
+
+
−
+
=
+
−
+
−
−
−
1
0
0
0
0
1
0
0
0
)
(
)
(
0
)
(
)
(
1
0
0
0
0
22
21
12
11
u
u
u
u
c
s
s
c
c
c
s
s
s
c
c
s
c
s
s
c
s
s
c
c
γ
α
γ
α
γ
α
γ
α
γ
α
γ
α
γ
α
γ
α
γ
α
γ
α
γ
α
γ
α
Sum
ę
k
ą
tów
αααα
i
γγγγ
mo
ż
na wyznaczy
ć
z równania:
)
,
arctan(
)
,
arctan(
12
11
21
11
u
u
u
u
−
=
=
+
γ
α
Je
ś
li u
33
= -1, wtedy c
ββββ
= -1 i s
ββββ
= 0, czyli
ββββ
=
ππππ
, a zatem równanie
macierzowe, które nale
ż
y rozwi
ą
za
ć
jest postaci:
−
=
−
−
−
−
−
−
−
1
0
0
0
0
1
0
0
0
)
(
)
(
0
)
(
)
(
22
21
12
11
u
u
u
u
c
s
s
c
γ
α
γ
α
γ
α
γ
α
Ró
ż
nic
ę
k
ą
tów
αααα
i
γγγγ
mo
ż
na wyznaczy
ć
z równania:
)
,
arctan(
)
,
arctan(
22
21
21
11
u
u
u
u
−
−
=
−
−
=
−
γ
α
Przykład. Analiza zadania kinematyki odwrotnej – 3
ostatnie zmienne manipulatora z łokciem
+
−
+
−
+
−
+
−
+
−
+
=
0
)
(
)
(
)
(
)
(
)
(
)
(
3
2
3
2
1
3
2
1
3
2
1
1
3
2
1
3
2
1
3
0
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
c
s
c
s
s
c
s
s
s
c
c
c
R
−
−
−
−
+
−
+
=
5
6
5
6
5
5
4
6
4
6
5
4
6
4
6
5
4
5
4
6
4
6
5
4
6
4
6
5
4
6
3
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
c
s
s
c
s
s
s
c
c
s
c
s
c
c
c
c
s
s
c
c
s
c
c
c
s
s
c
c
c
R
Równanie, które nale
ż
y rozwi
ą
za
ć
dla 3 ostatnich zmiennych
manipulatora jest postaci:
( )
R
R
gdzie
U,
R
R
R
6
0
3
0
6
3
=
=
=
T
Stosuj
ą
c rozwi
ą
zanie uzyskane w przypadku k
ą
tów Eulera, otrzymujemy:
23
1
13
1
33
33
3
2
23
3
2
1
13
3
2
1
5
4
23
33
3
2
23
3
2
1
13
3
2
1
5
4
13
)
(
)
(
)
(
)
(
)
(
)
(
r
c
r
s
u
r
c
r
s
s
r
s
c
s
s
u
r
s
r
c
s
r
c
c
s
c
u
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
−
=
+
−
+
−
+
−
=
=
+
−
+
+
+
=
=
Je
ś
li u
13
i u
23
nie s
ą
jednocze
ś
nie równe zeru, wówczas ze wzorów:
)
1
,
arctan(
lub
)
1
,
arctan(
2
33
33
2
33
33
u
u
u
u
−
−
=
−
=
β
β
otrzymujemy:
(
)
2
23
1
13
1
23
1
13
1
5
)
(
1
,
arctan
r
c
r
s
r
c
r
s
ϕ
ϕ
ϕ
ϕ
ϕ
−
−
±
−
=
Je
ś
li w powy
ż
szym równaniu zostanie wybrana dodatnia warto
ść
pierwiastka, wówczas k
ą
ty
ϕϕϕϕ
4
i
ϕϕϕϕ
6
obliczy
ć
mo
ż
na ze wzorów:
−
=
=
)
,
arctan(
)
,
arctan(
32
31
23
13
u
u
u
u
γ
α
zatem:
+
−
=
+
−
+
−
+
−
+
−
+
+
+
=
)
,
arctan(
)
)
(
)
(
)
(
,
)
(
)
(
)
(
arctan(
22
1
12
1
21
1
11
1
6
33
3
2
23
3
2
1
13
3
2
1
33
3
2
23
3
2
1
13
3
2
1
4
r
c
r
s
r
c
r
s
r
c
r
s
s
r
s
c
r
s
r
c
s
r
c
c
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
Podsumowanie rozwa
ż
a
ń
dla manipulatora z łokciem
(manipulatora stawowego)
−
−
−
=
33
6
23
6
13
6
r
d
d
r
d
d
r
d
d
p
p
p
z
y
x
z
y
x
Je
ś
li dysponujemy nast
ę
puj
ą
cymi danymi:
=
z
y
x
d
d
d
d
oraz:
=
33
32
31
23
22
21
13
12
11
r
r
r
r
r
r
r
r
r
R
wówczas zmienne przegubowe w notacji (D-H) s
ą
okre
ś
lone
nast
ę
puj
ą
cymi wzorami:
(
)
+
−
=
−
−
±
−
=
+
−
+
−
+
−
+
−
+
+
+
=
−
−
−
+
+
=
−
±
=
+
−
−
+
=
=
)
,
arctan(
)
(
1
,
arctan
)
)
(
)
(
)
(
,
)
(
)
(
)
(
arctan(
2
)
(
),
1
,
arctan(
)
,
arctan(
)
,
arctan(
)
,
arctan(
22
1
12
1
21
1
11
1
6
2
23
1
13
1
23
1
13
1
5
33
3
2
23
3
2
1
13
3
2
1
33
3
2
23
3
2
1
13
3
2
1
4
3
2
2
3
3
2
2
1
2
2
2
3
3
3
3
3
2
1
2
2
2
1
r
c
r
s
r
c
r
s
r
c
r
s
r
c
r
s
r
c
r
s
s
r
s
c
r
s
r
c
s
r
c
c
a
a
a
a
d
p
p
p
M
gdzie
M
M
s
a
c
a
a
d
p
p
p
p
p
z
y
x
z
y
x
y
x
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
Przykład. Manipulator SCARA
Poniewa
ż
kinematyka prosta tego manipulatora okre
ś
lona jest przez
macierz T
0
4
(4 stopnie swobody), to kinematyka odwrotna sprowadza si
ę
do rozwi
ą
zania nast
ę
puj
ą
cego równania macierzowego:
−
−
−
+
+
+
−
+
−
+
−
+
+
+
+
+
+
−
+
+
+
=
1
0
0
0
1
0
0
)
(
0
)
(
)
(
)
(
)
(
)
(
0
)
(
)
(
)
(
)
(
1
4
3
2
1
2
1
1
4
2
1
4
2
1
4
2
1
4
2
1
2
1
2
1
1
4
2
1
4
2
1
4
2
1
4
2
1
d
d
s
a
s
a
c
c
s
s
s
c
c
s
c
a
c
a
c
s
s
c
s
s
c
c
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
0
d
R
Rozwi
ą
zanie powy
ż
szego równania jest mo
ż
liwe wtedy i tylko wtedy gdy
macierz R jest postaci:
)
,
arctan(
1
0
0
0
0
11
12
4
2
1
r
r
c
s
s
c
=
−
+
=
−
−
=
ϕ
ϕ
ϕ
α
α
α
α
α
gdzie
,
R
Rzutowanie ramion manipulatora na płaszczyzn
ę
x
0
y
0
x
0
y
0
z
0
p
x
p
y
p
z
Wyznaczanie zmiennych przegubowych manipulatora
(na podstawie rysunku)
2
1
2
2
2
1
2
2
2
2
2
2
),
,
1
arctan(
a
a
a
a
d
d
r
r
r
y
x
−
−
+
=
−
±
=
gdzie
ϕ
)
,
arctan(
)
,
arctan(
2
2
2
2
1
1
ϕ
ϕ
ϕ
s
a
c
a
a
d
d
y
x
+
−
=
K
ą
t
ϕϕϕϕ
4
wyznaczamy z zale
ż
no
ś
ci:
)
,
arctan(
11
12
4
2
1
r
r
=
−
+
=
ϕ
ϕ
ϕ
α
Zatem:
)
,
arctan(
11
12
2
1
2
1
4
r
r
−
+
=
−
+
=
ϕ
ϕ
α
ϕ
ϕ
ϕ
4
3
d
d
d
z
+
=
oraz:
Wyszukiwarka
Podobne podstrony:
Kinematyka odwrotna
4 Kinematyka odwrotna
Kinematyka odwrotna, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatorów
wykład 5 +matlab, W SPR nr 03 04 Kinematyka Odwrotna
6 Kinematyka odwrotna
Kinematyka odwrotna id 235013 Nieznany
kinematyka odwrotna
odwrotna kinematyka manipulatoa
Odwrotne zadanie kinematyki
Wykł 1B wstępny i kinematyka
Wyklad 06 kinematyka MS
Wyklad 05 kinematyka MS
3 Rodzaje jednorodnych transformacji stosowanych w kinematy
więcej podobnych podstron