Przykładowe zadania EGZAMINACYJNE z przedmiotu Podstawy Automatyki
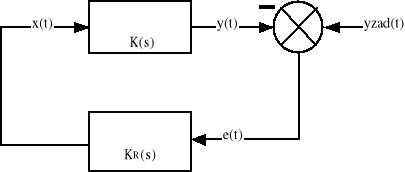
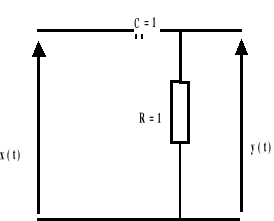
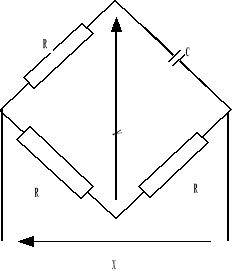
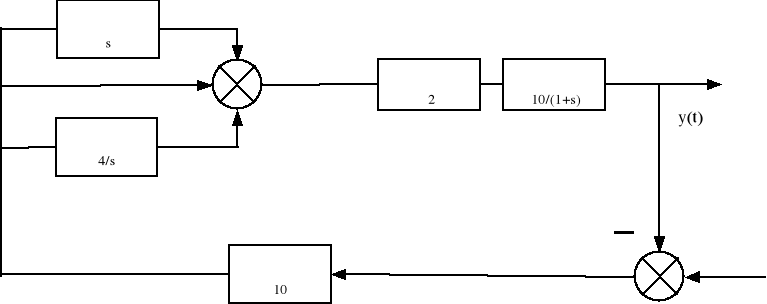
Dla przedstawionego układu
Podać równanie różniczkujące opisujące układ
Wyznacz transmitancję operatorową

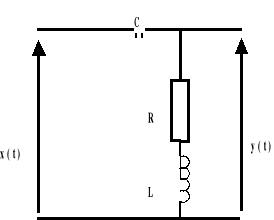
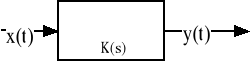
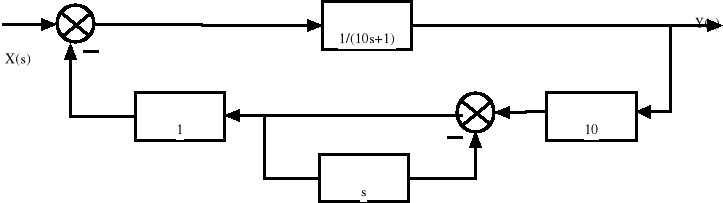
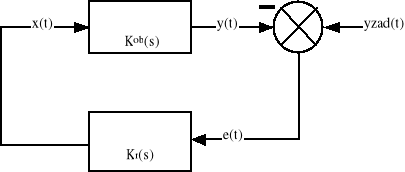
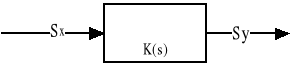
2. Wyznaczyć K(s)=?
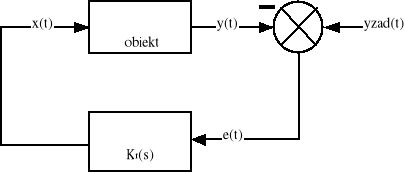
3. Parametry układu przedstawionego na rysunku są następujące:
Obiekt opisany równaniem: ![]()
. Regulator typu P o wzmocnieniu K.
Transmitancja operatorowa czujnika pomiarowego ![]()
Określ K=? dla którego układ regulacji jest stabilny.
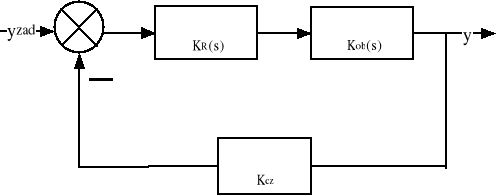
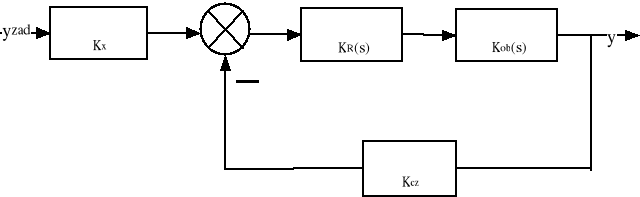
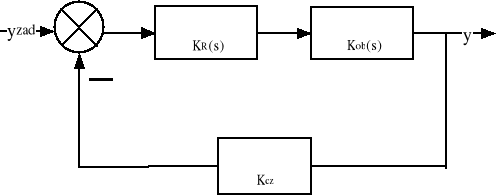
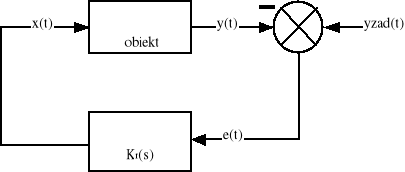
4. Dla układu przedstawionego na rysunku
o parametrach:
![]()
, ![]()
a) wyznacz wartość wyjścia układu w stanie ustalonym (yust), dla yzad=1(t).
b) Dobierz wartość wzmocnienia Kx układu przedstawionego poniżej, aby wartość na wyjściu układu w stanie ustalonym była taka sama jak w przypadku a, jeżeli Kcz=10.
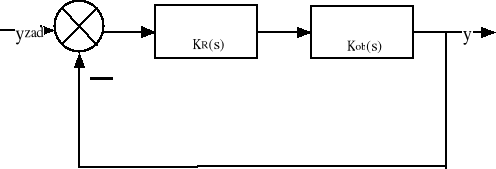
5. Dobrać K aby odpowiedź układu na skok jednostkowy miała charakter aperiodyczny.
gdzie:
![]()
![]()
6. Wyznacz transmitancję operatorową ![]()
7. Określić stabilność układu regulacji korzystając z :
- Kryterium Hurwitz'a
- Kryterium Nyquista
gdzie:
![]()
; ![]()
8 Wyznaczyć charakterystykę logarytmiczną amplitudy dla układu
![]()
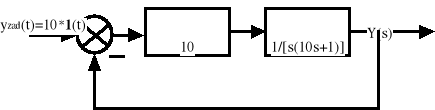
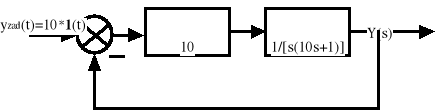
9. W układzie jak na rysunku Wyznaczyć uchyb statyczny układu es w trzech przypadkach, jeżeli wymuszenie yzad=10*1(t)
obiekt opisany jest równanie różniczkowym:
![]()
Transmitancja regulatora Kr(s):
10. Korzystając z kryterium Zieglera-Nicholsa wyznaczyć parametry (Kgr, Tosc) dla układu
![]()
11. Korzystając z kryterium optimum modułu wyznaczyć optymalną nastawę parametru K jeżeli transmitancja układu otwartego jest równa
![]()
12. Wyznaczyć amplitudę Yust odpowiedzi ustalonej obiektu na sygnał sinusoidalny x(t)=10sin10t. Równanie opisujące dynamikę obiektu: ![]()
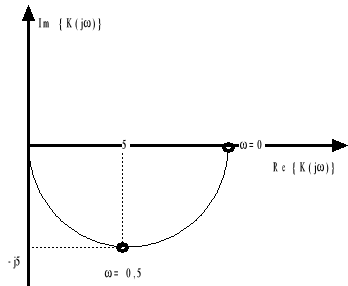
13. Dla przedstawionego układu
Wyznacz transmitancję widmową K(jω) i narysować charakterystykę amplitudowo-fazową
14. Przez układ o transmitancji operatorowej K(s) przechodzi sygnał x(t) = x1(t)+x2(t) będący sumą dwóch składowych: sygnału użytecznego x1(t)=100sint oraz zakłócającego x2(t)=1sin100t.
![]()
a) Narysować charakterystykę logarytmiczną amplitudy - układu
b) Wyznaczyć stosunek amplitud sygnału użytecznego do zakłócającego po przejściu przez układ
15. Parametry układu przedstawionego na rysunku są następujące:
Obiekt opisany równaniem: ![]()
Regulator typu P o wzmocnieniu: K
Transmitancja operatorowa czujnika pomiarowego ![]()
Określ K=? dla którego układ regulacji jest stabilny.
16. Korzystając z kryterium Nyquista znaleźć warunek jaki powinien spełniać parametr k aby układ był stabilny:
17. Określić k przy pomocy kryterium Hurwitza:
K1=![]()
; K2=![]()
18. Narysować charakterystykę logarytmiczną amplitudy transmitancji układu otwartego (metodą przybliżoną)
![]()
19. Korzystając z kryterium Zieglera-Nicholsa wyznaczyć parametry (Kgr, Tosc) dla układu
![]()
20. Obliczyć transmitancję układu przedstawionego na schemacie
21. Obliczyć transmitancję zastępczą układu przedstawionego na schemacie
22. Transmitancja układu otwartego wynosi:
![]()
Jakie powinno być k, aby uchyb statyczny w stanie ustalonym nie przekraczał 10% przy wymuszeniu yzad(t)=1(t) ?
23. Wyznaczyć wartość całki z kwadratu uchybu 
, po podaniu na wyjściu układu skoku jednostkowego yzad(t) = 1(t). Transmitancja operatorowa układu otwartego wynosi: ![]()
24. Wyznaczyć gęstość widmową wyjścia Sy(ω) układu o transmitancji ![]()
jeżeli na wejście układu podany jest sygnał o gęstości widmowej Sx(ω)=N.
25. Korzystając z kryterium Hurwitza wyznaczyć stabilność układu opisanego transmitancją:
![]()
26. Określić uchyb statyczny es układu
27. Wyznaczyć transmitancję K(s)=![]()
dla układu przedstawionego na rysunku
28. Wyznaczyć transmitancję ![]()
dla układu:
29. Wyznaczyć gęstość widmową wyjścia Sy(ω) układu o transmitancji ![]()
jeżeli na wejście układu podany jest sygnał o gęstości widmowej Sx(ω).
30. Korzystając z kryterium optimum modułu wyznaczyć optymalną nastawę parametru K jeżeli transmitancja układu otwartego jest równa
![]()
31. Dla jakiego k układ automatycznej regulacji będzie stabilny
![]()
32. Wyznaczyć charakterystyki logarytmiczne amplitudy i fazy dla układu
![]()
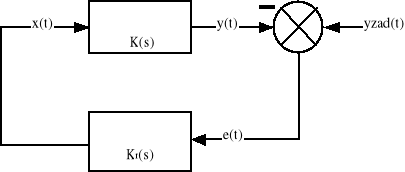
33. W układzie jak na rysunku
obiekt opisany jest równanie różniczkowym:
![]()
Transmitancja regulatora Kr(s):
Wyznaczyć uchyb statyczny układu es w trzech przypadkach, jeżeli wymuszenia yzad=1(t)
34. Korzystając z kryterium Hurwitza wyznaczyć stabilność układu opisanego transmitancją:
![]()
35. Korzystając z kryterium Nyquista wyznaczyć stabilność układu opisanego transmitancją:
![]()
36. Określić uchyb statyczny es układu
37. Narysować charakterystykę logarytmiczną amplitudy transmitancji układu otwartego (metodą przybliżoną)
![]()
38. Wyznaczyć uchyb statyczny układu es=?
39. Określić stabilność układu regulacji korzystając z kryterium Hurwitz'a
![]()
, ![]()
40. Wyznaczyć y(t) w stanie ustalonym, jeżeli:
![]()
oraz ![]()
41. Wyznaczyć charakterystyki logarytmiczne amplitudy i fazy dla układu
![]()
42. Dla jakiego K układ będzie stabilny (Zastosować kryterium Nyquista)
![]()
43. Wyznaczyć uchyb statyczny układu es=?
44. Wyznaczyć charakterystyki logarytmiczne amplitudy i fazy dla układu
![]()
45. Określić stabilność układu korzystając z K. Nyquista.
K0(s)=![]()
46. Wyznaczyć uchyb średniokwadratowy sygnału y.
Sx=N
K(s)=![]()
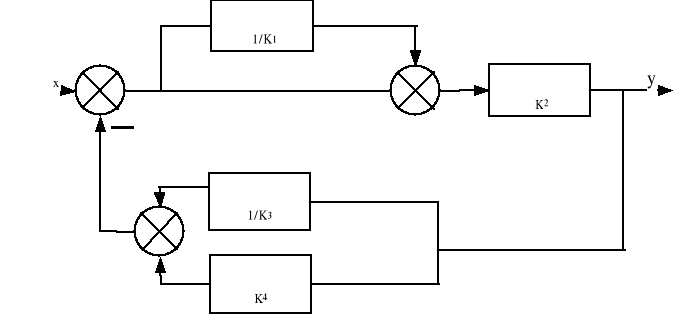
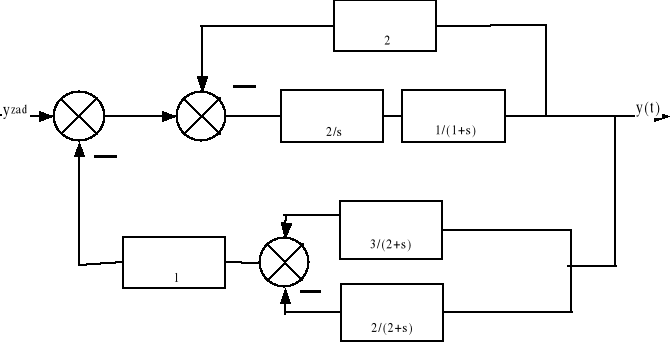
47. Wyznacz uchyb statyczny es=?
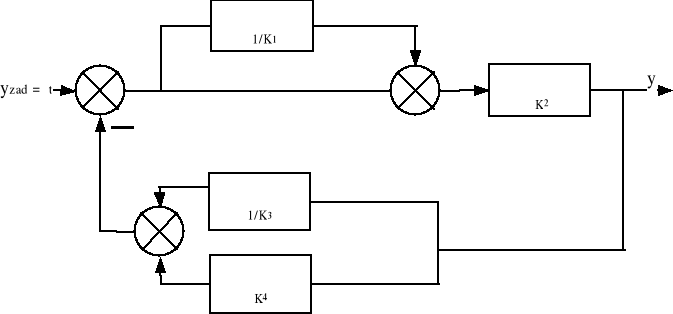
K1(s)=5, K2(s)=![]()
K3(s)=2s, K4(s)=s
48. Wyznaczyć charakterystyki logarytmiczne amplitudy i fazy dla układu
![]()
49. Określić stabilność układu regulacji (K. Hurwitz'a)
50. Dla jakiego k zapas modułu ΔM.=2 (Skorzystaj z k. Nyquista)
K0(s)=![]()
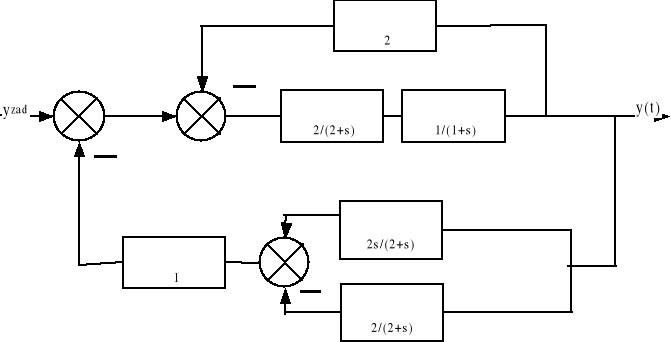
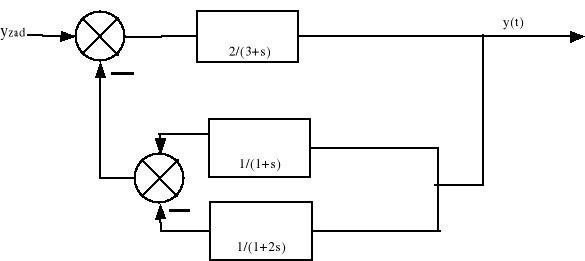
51. Wyznaczyć wartość ustaloną y.
52. Wyznacz uchyb statyczny es=?
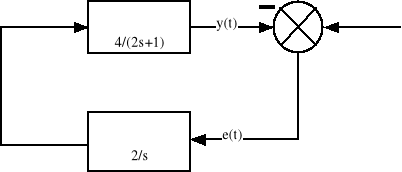
53. Wyznaczyć charakterystyki logarytmiczne amplitudy i fazy dla układu
![]()
12
C1
U1
U2
C2
R2
R1
Wyszukiwarka
Podobne podstrony:
projekt 2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
projekt 1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
dyskretna-egzamin-zaoczne, Studia, PWR, 2 semestr, Matematyka dyskretna, kolokwium
@Opracowane pytania do egzaminu z IM, Elektrotechnika AGH, Semestr III zimowy 2013-2014, Inżynieria
automaty-, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Automatyka, Autom
tsis kolos troche pytan, Automatyka i Robotyka, Semestr 4, Technologia sterowania
interpolacja projekt, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
12 - Przekszt sch blok, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Auto
Zagadnienia na egzamin, PWR - Automatyka i Robotyka W10, Semestr 1, air
JAUT6~1, Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, AUTOMATYKA LABORATORIUM, AUT
opracowanie TSS, Automatyka i Robotyka, Semestr 4, Technologia sterowania
tss, Automatyka i Robotyka, Semestr 4, Technologia sterowania
pytania teoria, IŚ Tokarzewski 27.06.2016, VI semestr COWiG, Podstawy Automatyki Procesów, KOLOKWIUM
automatyka i robotyka-rozwiazania, POLITECHNIKA, AiR, Semestr II, AUTOMATYKA I ROBOTYKA, KOLOKWIUM
opracowanie, Automatyka i Robotyka, Semestr 4, Technologia sterowania
interpolacje projekt2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
interpolacja projekt1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
kryterium Hurwitza, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Automaty
więcej podobnych podstron