1.PRAWO OHMA…
Wartość prądu elektrycznego przepływającego przez metalowy przewodnik zależy nie tylko od napięcia, wynikającego z różnicy potencjałów początku i końca przewodnika, ale od ściśle określonych cech ciała przewodzącego, które można przedstawić jednym parametrem zw. rezystancją. * Wartość potencjału I przepływającego przez metalowy przewodnik jest wprost proporcjonalna do napięcia U między jego końcami i odwrotnie proporcjonalna do jego rezystancji R: I= U/R
Stosunek napięcia U do prądu I nazywamy rezystancją przewodnika i oznaczamy przez R. Jednostką rezystancji jest 1 om. Odwrotność rezystancji nazywamy kondunktancją i oznaczamy G zatem G=1/R. Jednostką jest 1 simens (1S) będący odwrotnością oma.
Zależność rez. od temp.:
rezystancja metali czystych zwiększa się wraz ze wzrostem temperatury, a rez. roztworów kwasów, zasad, soli- maleje.
RT=R0[1+α(T-T0)]
1) α > 0 α= 0,04 1/°C
2) α jest bardzo małe- konstantan
3) α < 0 -dialektyki,elektrolity,półprzewodniki
2.PRACA I MOC PRĄDU EL..WYDZIELANIE SIĘ CIEPŁA PODCZAS PRZEPŁYWU PRĄDU
3.PRAWA KIRCHHOFFA- ZASADY STOSOWANIA
Wg. I prawa Kirchhoffa suma prądów wpływających do węzła jest równa sumie prądów odpływających od węzła. Przypisując prądom dopływającym do węzła znak + zaś prądom odpływającym znak - to I prawo można sformułować następująco: suma algebraicznych prądów gałęzi zbierających się w punkcie węzłowym obwodu rozgałęzionego jest równa zero.
II prawo Kirchoffa dotyczy napięć w oczku obwodu elektrycznego i brzmi ono: w dowolnym oczku obwodu prądu stałego suma sił elektromotorycznych (napięć źródłowych) jest równa iloczynowi rezystancji i prądów w gałęziach należących do rozpatrywanego oczka.
ΣE=ΣRI
Ponieważ przyjmuje się że zwrot sił elektromotorycznych, a więc ich znak, jest przeciwny do zwrotu napięć występujących na pozostałych elementach gałęzi, II prawo (napięciowe) można sformułować: w każdym dowolnym punkcie obwodu elektrycznego (oczku) suma sił elektromotorycznych (napięć źródłowych) jest równa sumie spadków napięć.
6. DZIAŁANIE POLA MAGNETYCZNEGO…
Indukcja magnetyczna to podstawowa wielkość charakteryzująca pole magnetyczne. Mówimy że indukcja magnetyczna określa intensywność pola. Im bowiem większa jest indukcja (B), tym większa siła F działa na przewód z prądem umieszczony w polu magnetycznym. indukcja magn. jest wielkością wektorową. Zwrot wektora indukcji jest zgodny ze zwrotem linii pola magnetycznego. Jednostką jest 1 tesla (1T). Zwrot siły F wyznaczamy z dogodnej reguły lewej dłoni: jeżeli lewą dłoń ustawimy tak, aby linie pola magn. zgodnie ze zwrotem wektora indukcji magnetycznej, były zwrócone do dłoni, a 4 palce pokryły się ze zwrotem prądu I, to odchylony kciuk wskaże zwrot siły F.
Załóżmy, że w polu magn. równomiernym o indukcji B umieszczono ramkę w taki sposób, że powierzchnia S ograniczona ramką jest prostopadła do kierunku linii pola. Strumieniem magnetycznym przecinającym ramkę nazywamy iloczyn indukcji B przez pole powierzchni S, czyli Φ=BS. Strumień mag. jest wielkością skalarną. jednostką jest 1 weber (1Wb). Strumień przecinający powierzchnię zamkniętą jest zawsze=0
W polu magnetycznym wytworzonym przez prąd elektryczny indukcja magn. w dowolnym miejscu zależy od własności magnetycznych środowiska, scharakteryzowanych przenikalnością magnetyczną. Dlatego żeby określić pole magn. wprowadzono wielkość wektorową zw. wektorem natężenia pola magnetycznego. H=B/μ a jednostka to (A/m)
Związek między przepływem a natężeniem pola magn. określa prawo przepływu: suma iloczynów natężenia pola magnetycznego i odcinków linii pola, wzdłuż których natężenie się nie zmienia, po zamkniętej drodze l, równa się przepływowi prądu obejmowanemu przez tę zamkniętą drogę.
8. OBWODY MAGNETYCZNE….
Jednym z podstawowych praw wykorzystywanych przy obliczaniu obwodów magnetycznych jest prawo przepływu: suma iloczynów natężenia pola magnetycznego i odcinków linii pola, wzdłuż których natężenie się nie zmienia, po zamkniętej drodze l, równa się przepływowi prądu obejmowanemu przez tę zamkniętą drogę.
W obwodach magnet. sumę iloczynów natężenia pola magnet. przez dł. drogi nazywamy często siłą magnetomotoryczną. Siła ta jest liczbowo równa przepływowi prądu i jest źródłem strumienia magnetycznego. Iloczyn natężenia pola magnetycznego na odcinku, np. pierwszym (k=1) H1, przez długość odcinka obwodu magnetycznego l1 nazywamy napięciem magnetycznym i oznaczamy Um1. W obwodzie magn.siła magnetomotoryczna jest równa sumie napięć magnetycznych.
Zależność Rm=l/μS nazywamy oporem magnetycznym lub też reluktancją. Jednostką reluktancja jest odwrotność henra czyli (1/H).
Wzór Φ=Θ/Rm=Fm/Rm nazywamy przez analogię do obwodu elektrycznego
prawem Ohma dla obwodu magnetycznego. Sile elektromotorycznej (lub napięciu źródłowemu) odpowiada siła magnetomotoryczna (lub przepływ), prądowi elektrycznemu odpowiada strumień magnetyczny, a rezystancji- reluktancja
Θ- E, Φ- I, Rm- R .
Ponieważ charakterystyka magnesowania rdzenia ferromagnetycznego jest nieliniowa zatem reluktancja jest zależna od nasycenia rdzenia czyli wartości strumienia magnetycznego. Obwód elektryczny należy zatem traktować jako nieliniowy.
I prawo Kirchhoffa dotyczące bilansu strumieni magnetycznych w węźle obwodu magnetycznego można sformułować następująco: dla węzła obwodu magnetycznego o liczbie gałęzi wynoszących b, suma algebraiczna strumieni magnetycznych jest =0
II prawo Kirchhoffa dotyczące bilansu napięć magnetycznych w oczku obwodu magnetycznego można sformułować następująco: dla oczka obwodu magnetycznego suma algebraiczna napięć magnetycznych wszystkich odcinków oczka jest = sumie algebraicznej sił magnetomotorycznych działających w tym oczku.
9. PRAWO INDUKCJI ELEKTROMAGNETYCZNEJ, INDUKOWANIE SIĘ SIŁY ELEKTROMOTORYCZNEJ, REGUŁA PRAWEJ DŁONI
Dzięki zastosowaniu prawa indukcji elektromagnetycznej zbudowano prądnice (generatory), w których energia kinetyczna jest przetwarzana w energię elektryczną, możliwe jest przesyłanie energii na duże odległości, przesyłanie informacji i ich odbiór. Powstanie napięcia indukowanego lub, tzw. siły elektromotorycznej indukowanej w uzwojeniu przy jakiejkolwiek zmianie strumienia magnetycznego skojarzonego z tym uzwojeniem nazywamy zjawiskiem indukcji elektromagnetycznej. Kierunek indukowanej siły elektromotorycznej wyznaczamy za pomocą tzw. reguły prawej dłoni: jeśli wyprostowana prawą dłoń ustawimy w taki sposób, że kciuk będzie wskazywał kierunek ruchu przewodu, a linie pola magnetycznego będą wchodziły do dłoni, to wyprostowane 4 palce wskażą kierunek indukowanej siły elektromotorycznej.
10. INDUKCYJNOŚĆ WŁASNA CEWKI, SAMOINDUKCJA
Podczas przepływu prądu elektrycznego przez cewkę powstaje w jej otoczeniu strumień magnetyczny. Przy określonej wartości prądu, wartość strumienia magnetycznego zależy od wymiarów cewki, jej liczby zwojów i środowiska, w jakim zamyka się strumień.
indukcyjnością własną cewki nazywamy stosunek strumienia skojarzonego z cewką ψ do prądu I płynącego przez cewkę. Indukcyjność własną oznaczamy przez L i określamy wzorem L=ψ/I
Jednostką indukcyjności jest 1 henr (1H). Indukcyjność własna cewki o rdzeniu wykonanym z materiałów paramagnetycznych i diamagnetycznych nie zależy od prądu płynącego w cewce. Indukcyjność własną cewki możemy traktować jako jej własność określającą zdolność do wytworzenia strumienia magnetycznego skojarzonego (przy jednostkowym prądzie).
12. WIELKOŚCI CHARAKTERYZUJĄCE PRZEBIEGI SINUSOIDALNE…
Jako przebiegi sinusoidalne będziemy rozumieli zarówno napięcie sinusoidalne jak i prąd sinusoidalnie zmienny. Badając przebiegi sinusoid. musimy przyjąć pewną zasadę mierzenia czasu t. Częstotliwość jest równa liczbie okresów przebiegu sinusoidalnego, przypadających na jednostkę czasu, czyli na jedną sekundę. Częstotliwość jest to odwrotność okresu czyli f=1/T a jednostką jest 1 herc (1Hz). Jeżeli przez T oznaczymy czas pełnego obrotu ramki, tzn. obrotu o kąt pełny, równy 2pi radianów to pulsacja ω=2π/T. jednostką pulsacji jest 1 radian na sekundę (1rad/sek.). Pulsacja to inaczej prędkość kątowa obrotu ramki. Wartością skuteczną prądu sinusoidalnego nazywamy taką wartość prądu stałego, który przepływając prze niezmienna rezystancję R, w czasie odpowiadającym okresowi T, spowoduje wydzielenie na tej rezystancji takiej samej ilości energii cieplnej, co prąd sinusoidalny w tym samym czasie. Wartością średnia półokresową prądu sinusoidalnego o okresie T nazywamy średnią arytmetyczną tego prądu obliczoną za połową okresu, w którym przebieg jest dodatni. Pojęcie wartości średniej opiera się na równoważności ładunku. Wartość średnia półokresowa prądu zmiennego jest to taka wartość prądu stałego, którego przepływ przez przekrój poprzeczny przewodnika w czasie T/2 spowoduje przesunięcie takiego ładunku elektrycznego, jaki byłby przesunięty podczas przepływu prądu zmiennego w tym samym czasie. Wartości skuteczne oznaczamy dużymi literami alfabetu.
13. ELEMENTY RLC W OBWODACH PRĄDU SINUSOIDALNIE ZMIENNEGO….
W obwodach prądu sinusoidalnego mamy do czynienia ze wszystkimi elementami pasywnymi czyli z rezystorami o rezystancji R, kondensatorami o pojemności C i cewkami o indukcyjności L. Każdy element rzeczywisty jest tak zbudowany że dominujące znaczenie ma jeden z wymienionych parametrów. Nie można jednak pominąć występowania pozostałych parametrów. Większość elementów ma dialektryk częściowo przewodzący w związku z czym nie może być pominięta tzw. rezystancja upływowa, odpowiadająca stratom w dialektyku. Ujawnienie się poszczególnych własności a więc i parametrów schematu zastępczego realnego urządzenia zależy w znacznym stopniu od częstotliwości, napięcia i prądu związanego z danym elementem. W schemacie obwodu występują więc przeważnie wszystkie parametry R,L,C, a często też indukcyjność wzajemna M. Obwody zawierające tylko jeden z wymienionych elementów nazywamy obwodami z elementami idealnymi. Niekiedy wyznaczenie schematu zastępczego elementu rzeczywistego lub urządzenia nie jest łatwe gdyż od połączenia elementów idealnych zależy prawidłowość przyjętego schematu.
14. SZEREGOWE I RÓWNOLEGŁE POŁĄCZENIE ELEM. RLC- REZONANS NAPIĘĆ I PRĄDÓW
Rezonans jest to taki stan pracy obwodu elektrycznego, w którym reaktancja wypadkowa obwodu lub jego susceptancja wypadkowa jest =0.
W rezonansie elektrycznym częstotliwość źródła równa jest częstotliwości własnej obwodu, która zależy jedynie od wartości indukcyjności L i pojemności C. Warunkiem koniecznym (ale nie dostatecznym) wystąpienia rezonansu elektrycznego jest to, aby obwód zawierał zarówno kondensatory, jak i cewki.
Rezonans można zdefiniować również jako stan obwodu, w którym reaktancja odbiornika lub susceptancja odbiornika są równe zeru.
Jeżeli w odbiorniku istnieje szeregowe połączenie elementów RLC i jest prawdziwy warunek że reaktancja (X)=0 to występuje rezonans szeregowy zwany rezonansem napięć.
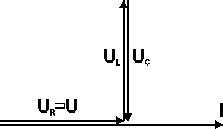
wtedy XL=XC lub ωL=1/ωC
Dobroć obwodu określa, ile razy napięcie na indukcyjności lub napięcie na pojemności jest większe od napięcia na zaciskach obwodu (Q=ρ/R)
Jeżeli w odbiorniku istnieje równoległe połączenie elementów RLC i spełniony jest warunek że susceptancja jest =0 to odbiornik jest w stanie rezonansu równoległego zwanego rezonansem prądów. 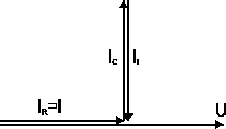
15. MOC PRĄDU SINUSOIDALNEGO, MOC CZYNNA, BIERNA, POZORNA….
Mocą chwilową nazywamy iloczyn chwilowych wartości napięcia i prądu: p=u(t)i(t)
Jeżeli napięcie u(t) oraz prąd i(t) są sinusoidalnymi funkcjami czasu.
Ze wzoru ![]()
wynika, że moc chwilowa p oscyluje z podwójną pulsacją 2 wokół stałej wartości mocy równej UIcos. Moc ta, równa wartości średniej mocy chwilowej obliczonej w okresie T, nazywa się mocą czynną P tak więc ![]()
Jednostką jest 1 wat (1W).
Moc bierna , oznaczana przez Q i definiowana jako iloczyn wartości skutecznych napięcia, prądu i sinusa kąta przesunięcia fazowego między nimi, czyli Q=UIsinα. Jednostką jest 1war (1var)
Moc pozorna oznaczana przez S i definiowana jako iloczyn wartości skutecznych napięcia i prądu S=UI. Jednostką jest (AV).
Moc czynna, bierna i pozorna związane są zależnością S2=P2+Q2
16. UKŁADY TRÓJFAZOWE, POJĘCIA PODSTAWOWE…
Układem wielofazowym nazywamy zbiór obwodów elektrycznych, w których działają napięcia źródłowe sinusoidalnie zmienne jednakowej częstotliwości, przesunięte względem siebie w fazie i wytwarzane w jednym źródle energii, zwanym prądnicą lub generatorem wielofazowym. W szczególnym przypadku trzech faz mamy układ trójfazowy. Do wytwarzania napięć w układzie trójfazowym służą prądnice (generatory) trójfazowe. W fazach indukują się napięcia o jednakowych amplitudach, o tej samej częstotliwości i przesunięte względem siebie o 1/3 okresu.
Układ trójfazowy nazywamy symetrycznym, jeśli prądnica trójfazowa symetryczna jest połączona z odbiornikiem złożonym z trzech identycznych impedancji zespolonych.
17. UKŁAD TRÓJFAZOWY SKOJARZONY W GWIAZDĘ (SYMETR., NIESYMETR.)
Symetryczny
Prądnica jest skojarzona w gwiazdę, jeśli końce uzwojeń trzech faz są ze sobą połączone we wspólny punkt zwany punktem neutralnym lub punktem gwiazdowym, a początki uzwojeń tworzą zaciski prądnicy. Również odbiornik można skojarzyć w gwiazdę łącząc jedne końcówki impedancji we wspólny punkt, a trzy pozostałe końcówki wyprowadzając na zewnątrz. W układzie trójfazowym symetrycznym gwiazda- gwiazda potencjał punktu neutralnego źródła jest równy potencjałowi punktu neutralnego odbiornika. Suma wartości skutecznych zespolonych napięć fazowych odbiornika jest =0. Suma wartości skutecznych zespolonych prądów przewodowych jest =0. Suma wartości skutecznych zespolonych napięć międzyfazowych jest =0.
Niesymetryczny
Punkt neutralny odbiornika połączonego w gwiazdę jest izolowany. Między punktami neutralnymi źródła i odbiornika występuje napięcie niesymetrii.
18. UKŁAD TRÓJFAZOWY SKOJARZONY W TRÓJKĄT (SYM. I NIESYMETR.)
Symetryczny:
Prądnica będzie połączona w trójkąt, jeśli koniec jednej fazy połączymy z początkiem drugiej, koniec drugiej fazy z początkiem trzeciej a koniec trzeciej fazy z początkiem pierwszej. Moduły prądów fazowych płynących w gałęziach trójkąta są jednakowe. Suma wartości skutecznych zespolonych prądów fazowych jest równa 0. Moduł prądu przewodowego Ip jest pierwiastek z 3 razy większy od modułu prądu fazowego Ir.
Niesymetryczny:
20. TRANSFORMATORY; CEL STOS. I RODZAJE
Są to urządzenia służące do zmiany napięć i natężeń prądów przemiennych na zasadzie indukcji elektromagnetycznej bez udziału ruchu mechanicznego. Transformatory mają różne przeznaczenie. Transformator energetyczny służy do przetwarzania energii elektrycznej o jednym napięciu na energię elektryczną o innym napięciu. Oprócz zastosowań energetycznych buduje się różne transformatory specjalne: np. pomiarowe zwane przekładnikami, spawalnicze i prostownikowe, a także transformatory miniaturowe stosowane w układach elektroniki, automatyki i teletransmisji. Różnorodność typów transformatorów mocy oraz zakresu ich przeznaczenia pociąga za sobą różnorodność ich konstrukcji. W zależności od liczby uzwojeń sprzężonych magnetycznie rozróżniamy transformatory dwuuzwojeniowe i wielouzwojeniowe.
21. BUDOWA TRANSFORMATORA (RDZEŃ, UZWOJENIA)
Są to urządzenia służące do zmiany napięć i natężeń prądów przemiennych na zasadzie indukcji elektromagnetycznej bez udziału ruchu mechanicznego. Składa się z rdzenia i dwóch uzwojeń: pierwotnego- które pobiera energie elektryczną ze źródła (np. sieci) i wtórnego, które oddaje energię elektryczną (np. odbiornikom). W zależności od liczby uzwojeń sprzężonych magnetycznie rozróżniamy transformatory dwuuzwojeniowe i wielouzwojeniowe. Napięcia i prądy związane z uzwojeniem pierwotnym nazywamy pierwotnymi, a związane z uzwojenie wtórnym- wtórnymi.
Rdzenie transformatorów wykonane są z materiałów ferromagnetycznych, obecnie najczęściej z blachy magnetycznej walcowanej na zimno o niskiej stratności. Konstrukcja rdzenia transformatora jednofazowego najczęściej jest ramkowa, natomiast 3- fazowego- trójkolumnowa lub pięciokolumnowa. Uzwojenia wykonane są z miedzi elektrolitycznej (rzadko z aluminium). Uzwojenia głównego napięcia nawijane są drutem profilowanym w izolacji papierowej. Konstrukcja uzwojeń powinna zapewniać dobrą wytrzymałość dialektryczną izolacji oraz bardzo dobrą wytrzymałość zwarciową.
22. ZASADA DZIAŁANIA TRANSFORMATORA JEDNOFAZOWEGO
23. CHRAKTERYSTYCZNE STANY PRZCY TRANSFORMATORA
Stan jałowy: jest to taki stan transformatora w którym jedno z uzwojeń zasilane jest napięciem o wartości znamionowej, a uzwojenie drugie jest rozwarte. Prąd pobierany w stanie jałowym przy znamionowym napięciu w transf. 1- fazowych wynosi najczęściej 5-10% napięcia znamionowego a dla 3- fazowych może wynosić tylko ułamek procenta. Przemienny strumień magnetyczny powoduje powstanie w rdzeniu strat z histerezy oraz od prądów wirowych. Całość tych strat nazywamy stratami w rdzeniu lub stratami jałowymi. Straty mocy w uzwojeniu pierwotnym są bardzo małe i można przyjąć że cała moc jaką pobiera transformator w stanie jałowym to moc strat w rdzeniu. Prąd jałowy transf. równy prawie prądowi magnesującemu jest proporcjonalny do natężenia pola magnetycznego.
Stan zwarcia pomiarowego: napięciem zwarcia transformatora nazywamy napięcie, jakie należy przyłożyć do zacisków uzwojenia pierwotnego, aby przy zwartych zaciskach uzwojenia wtórnego spowodować przepływ prądu znamionowego w obu uzwojeniach. Napięcie zwarcia jest zazwyczaj niewielkie i wynosi kilka lub kilkanaście % napięcia znamionowego. Moc pomierzona przy zwarciu pomiarowym jest praktycznie równa mocy traconej w uzwojeniach transformatora. Moc pobierana przy zwarciu praktycznie w całości pokrywa straty obciążeniowe w uzwojeniach, co pozwala na obliczenie rezystancji zwarcia transformatora. 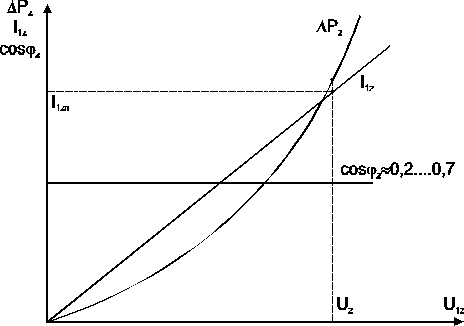
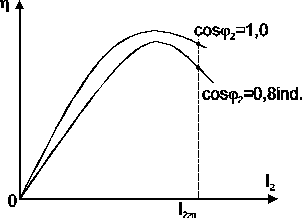
Stan obciążenia: występuje gdy do zacisków wtórnych jest dołączony odbiornik. W stanie obciążenia transformatora można wyznaczyć jego charakterystykę zewnętrzną oraz charakterystykę sprawności. Charakterystyką zewn. nazywamy zależność napięcia na zaciskach uzwojenia wtórnego U2 do prądu wtórnego I2 przy U1=UZN=const., f=const., cosφ2=const. 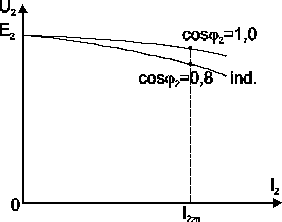
Charakterystyki zewnętrzne transformatora jednofazowego
Charakterystyki sprawności transformatora jednofazowego
25. BUDOWA SILNIKA ASYNCHRONICZNEGO 3- FAZOWEGO KLATKOWEGO, PIERŚCIENIOWEGO
Silniki asynchroniczne są najbardziej rozpowszechnionymi maszynami elektrycznymi, zarówno z uwagi na ich taniość, jak i prostotę budowy i obsługi oraz łatwość konserwacji.
Silnik asynchroniczny składa się z dwóch podstawowych części: nieruchomego stojana i obracającego się wirnika. Zarówno stojan jak i wirnik mają obwody magnetyczne stalowe wykonane z cienkich odizolowanych blach elektrotechnicznych; ma to na celu zmniejszenie strat od prądów wirowych. Na wewnętrznej powierzchni stojana wycięte są żłobki, w których umieszczone jest uzwojenie trójfazowe. W zależności od rodzaju uzwojenia wirnika rozróżnia się silniki asynchroniczne zwarte (klatkowe) i pierścieniowe.
W silniku asynchronicznym zwartym w żłobkach wirnika znajdują się nieizolowane pręty wykonane z miedzi lub aluminium, zwarte na obydwu czołach wirnika. Na duże moce (nawet rzędu MW) wykonywane są silniki o wirniku klatkowym, tzw. głębokożłobkowe i dwuklatkowe. Silniki te posiadają korzystne charakterystyki rozruchowe. W silniku asynchronicznym pierścieniowym uzwojenie wirnika wykonane jest przewodami izolowanymi podobnie jak uzwojenie stojana. Uzwojenie to jest najczęściej uzwojeniem trójfazowym skojarzonym trwale w gwiazdę bądź w trójkąt.
Końce uzwojenia doprowadzone są do trzech odizolowanych pierścieni ślizgowych, do których przylegają szczotki węglowe. Do uzwojenia wirnika silnika pierścieniowego można przyłączyć rezystory zewnętrzne, które w zależności od tego, czy przewidziane są do pracy krótkotrwałej lub ciągłej (czyli od przekroju drutu) mogą służyć jako rozruszniki lub regulatory prędkości obrotowej. Silniki asynchroniczne pierścieniowe, jako kosztowniejsze i trudniejsze w obsłudze, nie są tak rozpowszechnione jak silniki zwarte i mają od tych ostatnich mniejszą sprawność i współczynnik mocy. Silniki asynchroniczne pierścieniowe mają za to lepsze właściwości rozruchowe.
26. ZASADA DZIAŁANIA SILNIKA ASYNCHRONICZNEGO, POSLIZG, MOMENT OBROTOWY
Silnik asynchroniczny składa się z dwóch podstawowych części: nieruchomego stojana i obracającego się wirnika. Zarówno stojan jak i wirnik mają obwody magnetyczne stalowe wykonane z cienkich odizolowanych blach elektrotechnicznych; ma to na celu zmniejszenie strat od prądów wirowych. Na wewnętrznej powierzchni stojana wycięte są żłobki, w których umieszczone jest uzwojenie trójfazowe. Uzwojenie stojana w zależności od napięcia sieci zasilającej oraz znamionowego napięcia silnika może być łączone w gwiazdę lub trójkąt W przypadku, gdy napięcie fazowe stojana jest równe napięciu międzyprzewodowemu sieci zasilającej, wówczas silnik powinien być połączony w trójkąt, natomiast silnik łączymy w gwiazdę gdy napięcie międzyprzewodowe sieci jest pierwiastek z 3 razy większe niż napięcie fazowe silnika. Silniki asynchroniczne do sieci mają przyłączone uzwojenie stojana. Uzwojenie wirnika nie ma połączenia elektrycznego z siecią; energia przenoszona jest do tego uzwojenia na drodze indukcji elektromagnetycznej. Po włączeniu uzwojenia stojana do sieci trójfazowej popłynie w nim prąd, który wytworzy w szczelinie maszyny wirujące pole magnetyczne. Pole to przecinając pręty uzwojenia wirnika indukuje w nich siłę elektromotoryczną. Jeżeli obwód uzwojenia wirnika jest zamknięty, to popłynie w nim prąd, który współdziałając z polem magnetycznym stojana wytworzy siłę działającą na wirnik w kierunku zgodnym z kierunkiem ruchu pola wirującego. Aby więc powstał moment napędowy musi zachodzić przecinanie prętów uzwojenia wirnika przez linie sił pola magnetycznego wirującego, czyli prędkość wirowania wirnika musi być mniejsza od prędkości pola wirującego (prędkości synchronicznej). Względną różnicę tych prędkości nazywamy poślizgiem. Poślizg silnika przy obciążeniu znamionowym wynosi kilka procent
i jest tym mniejszy, im większa jest moc znamionowa. Przy przeciążeniu poślizg wynosi kilkanaście procent, a podczas biegu jałowego silnika, ułamek procenta. W pierwszej chwili rozruchu, gdy wirnik jest jeszcze nieruchomy, poślizg jest równy 100%.
28. SPOSOBY ROZRUCHU SILNIKÓW ASYNCHRON. PRĄD ROZRUCH, MOMENT ROZRUCHU
Rozruch silnika obejmuje okres przejściowy od postoju do stanu pracy ustalonej. Rozruch jest możliwy tylko wtedy, gdy moment elektromagnetyczny silnika przewyższa moment hamujący na wale czyli występuje tzw. moment dynamiczny. Przy określonym momencie bezwładności układu silnik-maszyna robocza, wartość momentu dynamicznego decyduje o czasie trwania rozruchu.
Praca silnika asynchronicznego przy nieruchomym wirniku ze zwartym jego uzwojeniem odpowiada stanowi zwarcia silnika. Pobierany jest wówczas duży prąd rozruchowy, który jest szkodliwy, zarówno ze względu na sam silnik (grzanie uzwojeń) jak i na sieć zasilającą (duże spadki napięć). Dąży się do zmniejszenia prądu rozruchowego, przy czym pożądane jest równocześnie powiększenie momentu rozruchowego silnika.
Rozruch bezpośredni: Bezpośrednie przyłączenie do sieci silnika asynchronicznego zwartego związane jest z przepływem znacznego prądu rozruchowego.
Rozruch za pomocą przełącznika gwiazda- trójkąt: Przełącznik gwiazda-trójkąt stosowany jest w celu zmniejszenia prądu pobieranego z sieci w chwili rozruchu, przez zmniejszenie napięcia na zaciskach uzwojenia stojana. W pierwszej chwili uruchamiania, uzwojenie stojana połączone jest w gwiazdę, następnie przełączamy je w trójkąt. Ten sposób rozruchu stosowany jest wówczas, gdy rozruch odbywa się bez obciążenia lub przy niewielkim obciążeniu. Przełączników gwiazda-trójkąt używa się przy uruchamianiu silników średniej mocy (najczęściej do 15kW) i tylko do silników, których uzwojenie stojana w czasie normalnej pracy powinno być połączone w trójkąt.
Rozruch za pomocą autotransformatora: Ten sposób rozruchu stosuje się do silników o dużej mocy. Zadaniem autotransformatora jest zmniejszanie napięcia doprowadzanego do silnika do wartości (0,5...0,7)Uzn.
29. REGULACJA PRĘDKOŚCI OBROTOWEJ, HAMOWANIE SILNIKÓW
Najczęściej stosowanymi sposobami hamowania silników asynchronicznych zwartych są: hamowanie przeciwprądowe i hamowanie prądem stałym. Niekiedy jest stosowane również hamowanie prądnicowe (nadsynchroniczne).
Hamowanie przeciwprądowe: Hamowanie to polega na zmianie kierunku obrotów pola wirującego silnika. Zmianę tę dokonujemy przez przełączenie dwóch dowolnych faz uzwojenia stojana. że prąd płynący w okresie hamowania przeciwprądem osiągnie znaczne wartości, większe nawet od prądu rozruchu bezpośredniego. Związane to jest z tym, że w okresie hamowania do silnika posiadającego energię kinetyczną nagromadzoną w wirniku i innych połączonych z nim masach wirujących dostarczona jest również energia pola wirującego. Cała ta energia zamienia się w wirniku na energię cieplną. Czas hamowania silnika jest bardzo krótki i silnik po zatrzymaniu się, może zmienić kierunek wirowania.
Hamowanie prądem stałym: Hamowanie prądem stałym polega na tym, że po odłączeniu uzwojenia stojana od sieci trójfazowej zostaje ono podłączone do źródła prądu stałego. Hamowanie prądem stałym jest mniej skuteczne w porównaniu z hamowaniem przeciwprądem, ale jest ono łagodne i po osiągnięciu prędkości obrotowej równej zeru nie zachodzi zmiana kierunku wirowania. W czasie hamowania, z sieci pobierana jest tylko energia potrzebna do wzbudzenia, zatem znacznie mniejsza jest ilość ciepła wydzielanego w uzwojeniach silnika.
31. BUDOWA I ZASADA DZIALANIA MASZYN PRĄDU STAŁEGO (PRĄDNICA, SILNIK)
Maszyny prądu stałego mogą pracować w charakterze silników, prądnic i hamulców. Silniki przetwarzają dostarczoną energię elektryczną na energię mechaniczną, prądnice natomiast zamieniają energię mechaniczną maszyny napędzającej na energię elektryczną. Zjawisko przeciwdziałania momentu elektromagnetycznego momentowi maszyny napędzającej, jakie występuje w prądnicy, można wykorzystać do elektrycznego hamowania.
Maszyny prądu stałego mogą być budowane jako komutatorowe i unipolarne. Drugi rodzaj maszyn nadaje się wyłącznie do celów specjalnych, natomiast maszyny komutatorowe są stosowane powszechnie.
32. SILNIK BOCZNIKOWY PR. STAŁEGO (SCHEMAT….) Charakterystyka zewnętrzna silnika bocznikowego
1 - przy pominięciu wpływu oddziaływania twornika; 2 - z uwzględnieniem oddziaływania twornika
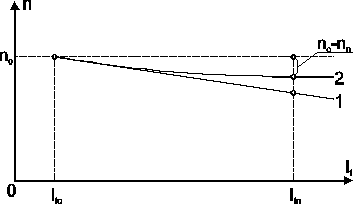
Charakterystyka zewnętrzna jest to zależność prędkości obrotowej silnika od prądu twornika przy stałym napięciu zasilającym i stałym prądzie wzbudzenia. Przy dużych obciążeniach prędkość obrotowa nieznacznie wzrasta z powodu zmniejszania się strumienia magnetycznego. Jest to wynikiem nakładania się na pole magnetyczne biegunów głównych pola powstającego od prądu twornika - tzw. oddziaływanie twornika. Zmienność prędkości obrotowej
waha się od 2 do 5%.
Charakterystyka mechaniczna
pozwala ocenić zachowanie się silnika w układzie napędowym.
Z warunków statecznej
pracy układu napędowego
wynika, że przy stałym momencie
charakterystyka mechaniczna
powinna być
funkcją malejącą.
W przeciwnym przypadku mogłoby wystąpić rozbieganie lub utknięcie silnika. Sytuacja taka jest możliwa przy znacznej reakcji twornika o charakterze rozmagnesowującym.
Regulację prędkości obrotowej silnika bocznikowego możemy przeprowadzić przez: zmianę strumienia magnetycznego, zmianę rezystancji w obwodzie twornika, zmianę napięcia zasilającego. Zmianę wartości strumienia magnetycznego można uzyskać włączając rezystancję dodatkową do obwodu wzbudzenia. Tym sposobem możemy regulować prędkość w górę.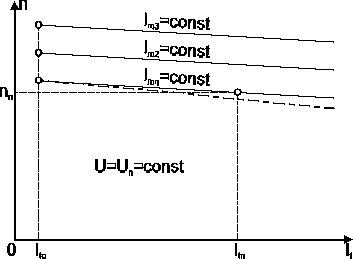
Włączenie rezystancji dodatkowej w obwód twornika pozwala uzyskać regulację prędkości w dół.
Wadą tego sposobu regulacji prędkości obrotowej są znaczne straty energii wydzielanej w postaci ciepła w oporniku dodatkowym.
33. SILNIK SZEREGOWY PRĄDU STAŁEGO (SCHEMAT…..)
Silniki szeregowe ze względu na swoje właściwości (duży moment rozruchowy i dużą rozpiętość osiąganych prędkości obrotowych) stosowane są głównie w trakcji elektrycznej (koleje, tramwaje, trolejbusy, kolejki, wózki akumulatorowe), gdzie pracują sprzęgnięte na stałe z osią pojazdu w sposób nierozłączny. W silniku szeregowym uzwojenie wzbudzające i uzwojenie twornika połączone są szeregowo, tak więc strumień zmienia się proporcjonalnie do zmian obciążenia. 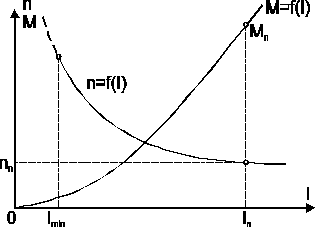
Charakterystyka zewnętrzna i charakterystyka momentu silnika szeregowego
Charakterystyka momentu, podobnie jak charakterystyka zewnętrzna wyznaczana jest przy stałym napięciu zasilającym.
Wykresem tej charakterystyki jest więc parabola. Cenną właściwością silnika szeregowego jest szybki wzrost momentu przy wzroście prądu, co pozwala na zastosowanie go do pracy w warunkach dużych przeciążeń i ciężkich rozruchów. a zatem poprzez regulację Rr od maksimum do zera osiągamy płynny wzrost prędkości obrotowej silnika od zera do wartości znamionowej.
Rozruchu silnika szeregowego dokonuje się przy obciążeniu, poprzez zmianę rezystancji rozrusznika Rr włączonego szeregowo z twornikiem. Wzrostowi rezystancji Rr odpowiada mniejsza prędkość obrotowa przy tym samym prądzie obciążenia. Regulację prędkości obrotowej w silniku szeregowym można przeprowadzać przez: zmianę strumienia magnetycznego,
zmianę rezystancji w obwodzie twornika, zmianę napięcia zasilającego. 
Regulacja prędkości obrotowej silnika szeregowego przez bocznikowanie uzwojenia wzbudzającego
Zmianę wartości strumienia magnetycznego osiąga się przez bocznikowanie uzwojenia wzbudzenia lub uzwojenia twornika silnika szeregowego. W pierwszym sposobie, po zbocznikowaniu, przez uzwojenie magnesujące płynie mniejszy prąd i w konsekwencji wzrasta prędkość obrotowa. Regulację prędkości przez zmianę napięcia zasilającego uzyskuje się przez zmianę napięcia w sieci zasilającej lub przez łączenie szeregowe bądź szeregowo-równoległe dwóch lub więcej mechanicznie ze sobą, sprzęgniętych silników. Najbardziej rozpowszechnionym układem jest układ trakcyjny jako zespół dwóch, czterech lub sześciu silników szeregowych, które początkowo łączy się szeregowo, a następnie równolegle.
Wyszukiwarka
Podobne podstrony:
Žci ga EGZAMIN WSZYSTKO
Egzamin ci ga do wydruku, zarządzanie, Rachunkowość Zarządcza
ci ga 1, AGH - IMIR - IMIM, II ROK, PKM, PKM - egzamin II rok
ROŽLINY OZDOBNE Âci-ga 1 kolo, Studia, III rok, III rok, V semestr, pomoce naukowe, do egzaminu
Âci-ga na egzamin, Studia, IV rok, PST, Projektowanie struktur terenowych
Opracowanie na MO - wersja ci ga, Politechnika Poznańska, Mechatronika, SEMESTR I, Odlewnictwo, Egz
GENA -CI-GA DU-A, VI rok, Genetyka, Genetyka, Egzamin
Wszyscy kochamy biofizyk - ci ga, UMED wojlek I rok, Biofizyka, Biofiza, egzaminegzamin
sprz g a ci ga, PKM egzamin kolosy ( łukasik, Salwiński )
ci ga, ! UR Towaroznawstwo, III ROK, 1 semestr, Towaroznawcza ocena konserw i przetworów z owoców i
POB egzamin - ci ga, wisisz, wydzial informatyki, studia zaoczne inzynierskie, przetwarzanie obrazo
EGZAMIN CI GA DOC
Termodynamika egzamin, ci ga
wersja ci ga
(2) zarz dzanie wyk?y ci ga
więcej podobnych podstron