
1
UKŁAD KASKADOWY NA STAŁ
Ą
MOC
Zasada regulacji pr
ę
dko
ś
ci k
ą
towej silników indukcyjnych w układach
kaskadowych polega na wprowadzeniu do ka
ż
dej fazy wirnika dodatkowej siły
elektromotorycznej E’d o cz
ę
stotliwo
ś
ci równej cz
ę
stotliwo
ś
ci po
ś
lizgu f2 =f1s. Przez
zmian
ę
modułu i fazy E’d w stosunku do siły elektromotorycznej E’20, indukowanej
w uzwojeniu wirnika, uzyskuje si
ę
zmian
ę
pr
ę
dko
ś
ci k
ą
towej i współczynnika mocy
silnika.
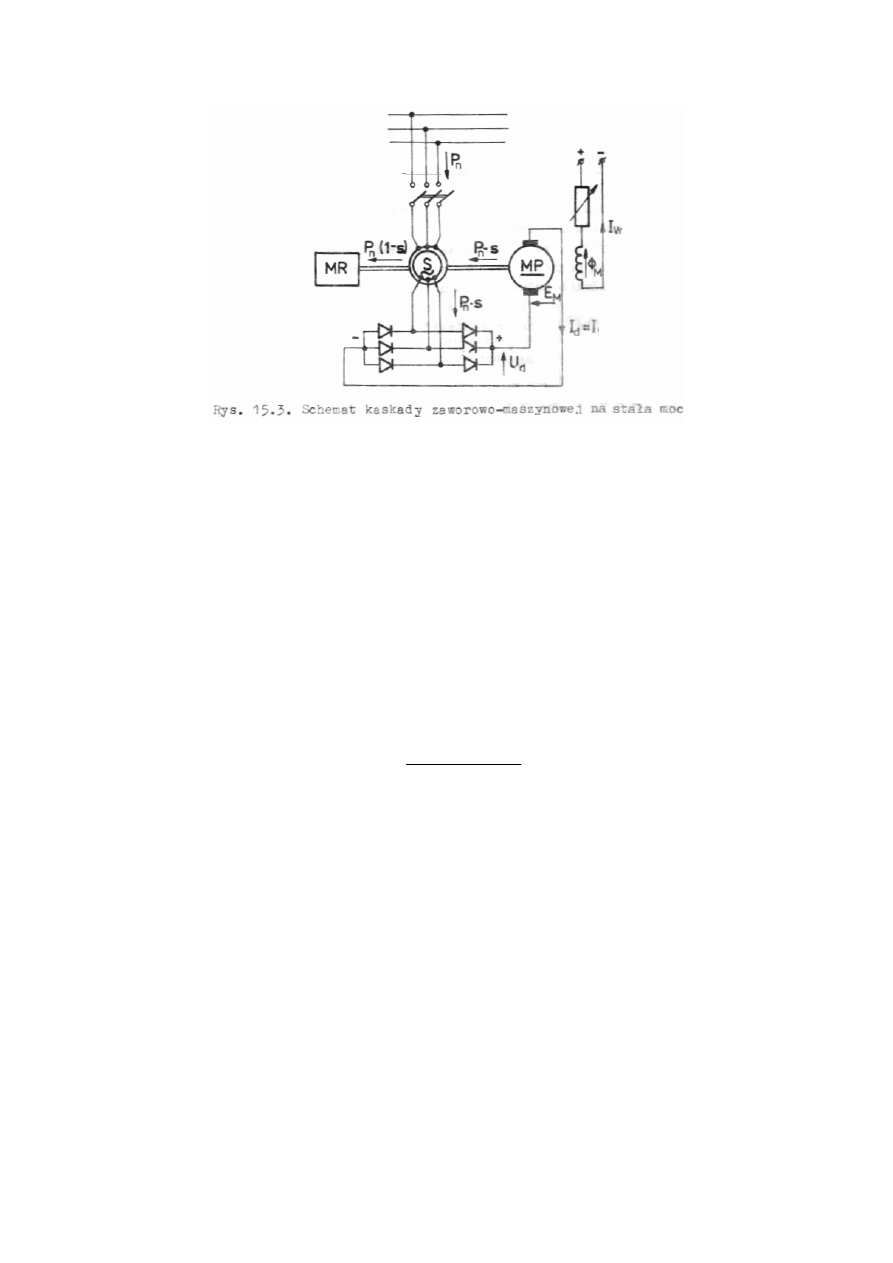
2
W układach kaskadowych na stał
ą
moc, moc pobrana z sieci przez silnik
indukcyjny zamieniona jest na moc mechaniczn
ą
s)
-
(1
P
P
n
=
oraz na tzw. moc
po
ś
lizgu w obwodzie wirnika
ns
P
. Moc po
ś
lizgu, po przetworzeniu w prostowniku
na moc pr
ą
du stałego, zasila silnik pr
ą
du stałego. Z kolei moc ta jest zamieniana na
moc mechaniczna i przekazywana na wał silnika indukcyjnego.
n
P
=
+
−
⋅
ns
n
P
s
P
)
1
(
Ś
redni
ą
warto
ść
pr
ą
du wyprostowanego I
d
okre
ś
la zale
ż
no
ść
:
Z
M
p
d
R
E
s
E
k
I
−
⋅
⋅
=
20
gdzie:
Z
R
– rezystancja zast
ę
pcza obwodu prostownika i twornika silnika pomocniczego,
20
E
– siła elektromotoryczna wirnika przy po
ś
lizgu s = 1,
mp
mp
k
p
/
sin
/
π
π
−
– stosunek napi
ę
cia wyprostowanego
0
d
U
przekształtnika mostkowego
w stanie jałowym do fazowego napi
ę
cia zasilania.
Przy zało
ż
eniu,
ż
e I
d
= 0 otrzymuje si
ę
zale
ż
no
ść
:
M
j
M
e
p
E
k
s
E
k
=
⋅
⋅
=
⋅
⋅
0
20
ϖ
φ
3
Po uwzgl
ę
dnieniu zale
ż
no
ś
ci na po
ś
lizg silnika indukcyjnego:
0
0
0
0
ϖ
ϖ
ϖ
j
s
−
=
otrzymuje
si
ę
zale
ż
no
ść
okre
ś
laj
ą
c
ą
charakterystyk
ę
regulacyjn
ą
układu
kaskadowego na stał
ą
moc:
0
20
20
0
0
ω
φ
ϖ
ϖ
⋅
⋅
+
⋅
⋅
=
M
e
p
p
j
k
E
k
E
k
gdzie:
oj
ω
– pr
ę
dko
ść
k
ą
towa idealnego biegu jałowego,
0
ω
– pr
ę
dko
ść
synchroniczna silnika.
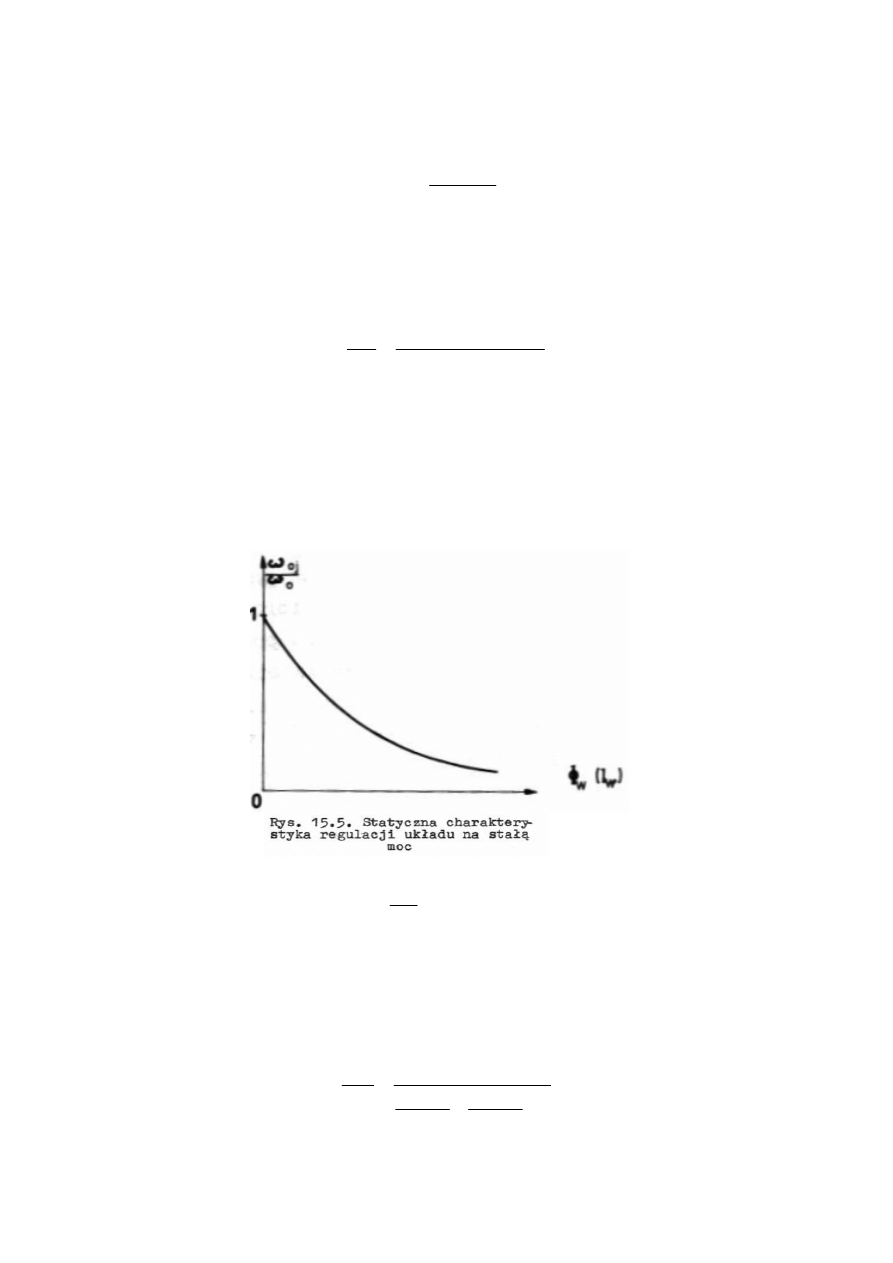
Z przebiegu charakterystyki
)
(
0
0
M
j
f
φ
ω
ω
=
wynika,
ż
e pr
ę
dko
ść
k
ą
towa zmienia
si
ę
hiperbolicznie w funkcji strumienia magnetycznego
M
φ
maszyny pomocniczej,
a wi
ę
c nie mo
ż
na doprowadzi
ć
silnika indukcyjnego do pr
ę
dko
ś
ci
0
=
ω
.
Moment obrotowy silnika indukcyjnego:
2
4
0
0
0
0
+
−
−
+
−
−
=
s
s
s
s
s
s
s
s
M
M
kk
kk
ek
ea
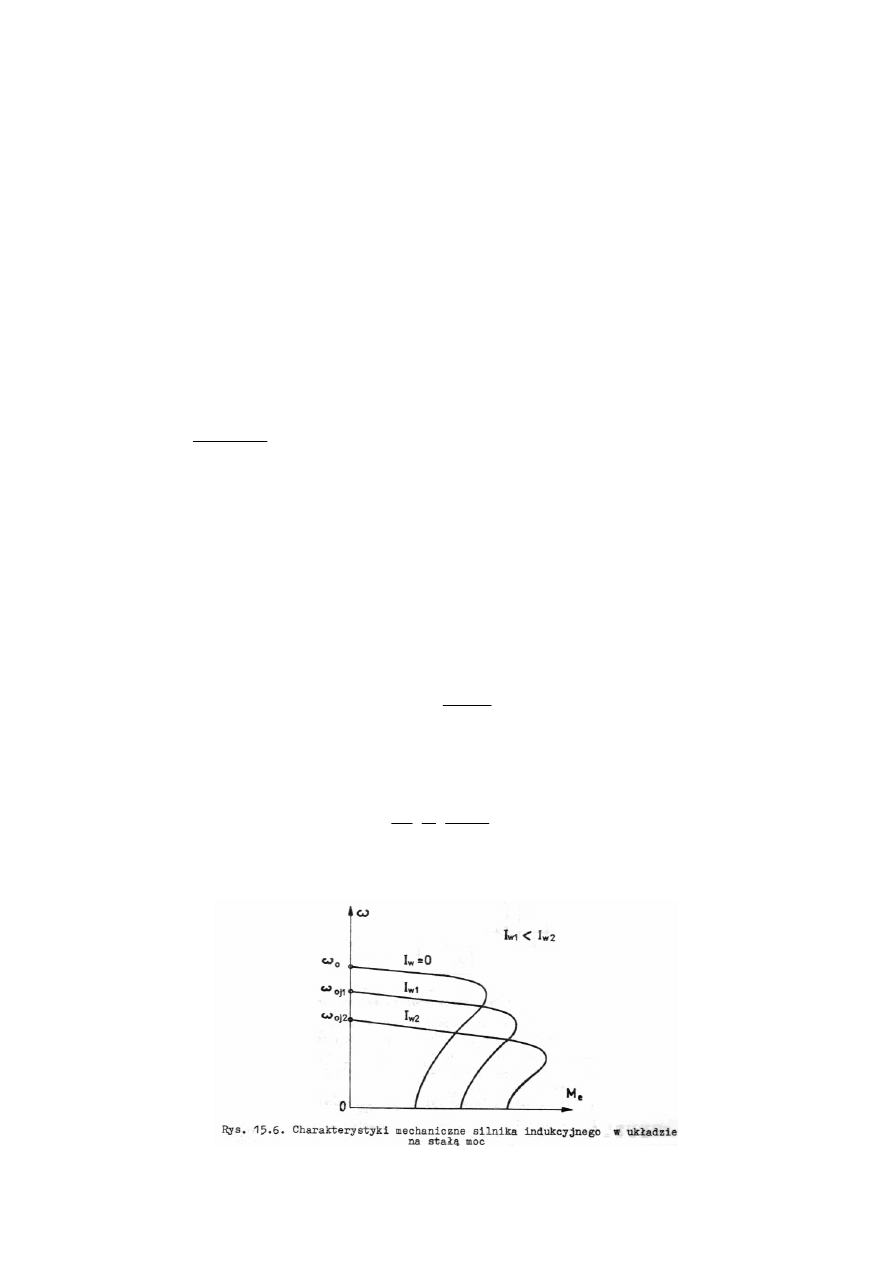
4
gdzie:
kk
s
– po
ś
lizg krytyczny w układzie kaskadowym,
ea
M
– moment obrotowy silnika indukcyjnego,
ek
M
– moment krytyczny silnika w układzie kaskadowym.
Całkowity moment elektromagnetyczny kaskady zaworowo-maszynowej, jako suma
momentu M
ea
silnika indukcyjnego i M
ep
silnika pomocniczego pr
ą
du stałego, wynosi:
)
1
(
λ
+
⋅
≡
+
=
ea
ep
ea
e
M
M
M
M
,
gdzie:
20
0
E
k
k
p
M
e
⋅
⋅
⋅
=
ω
φ
λ
.
Przy niewielkim zwi
ę
kszeniu zakresu regulacji, bardzo szybko zwi
ę
ksza si
ę
moc znamionowa silnika pomocniczego M
p
. Na skutek tego, w kaskadach zaworowo-
maszynowych na stał
ą
moc, praca układu odbywa si
ę
w zakresie po
ś
lizgów
idealnego biegu jałowego
5
,
0
0
≤
s
. Moment obrotowy silnika asynchronicznego
mo
ż
na wyznaczy
ć
z mocy po
ś
lizgu w obwodzie wyprostowanego pr
ą
du wirnika, czyli:
s
I
U
M
d
d
ea
⋅
⋅
=
0
ω
.
Moment krytyczny:
2
2
20
0
)
1
(
2
3
3
λ
π
ω
+
⋅
⋅
⋅
⋅
=
Z
ek
X
E
M
5
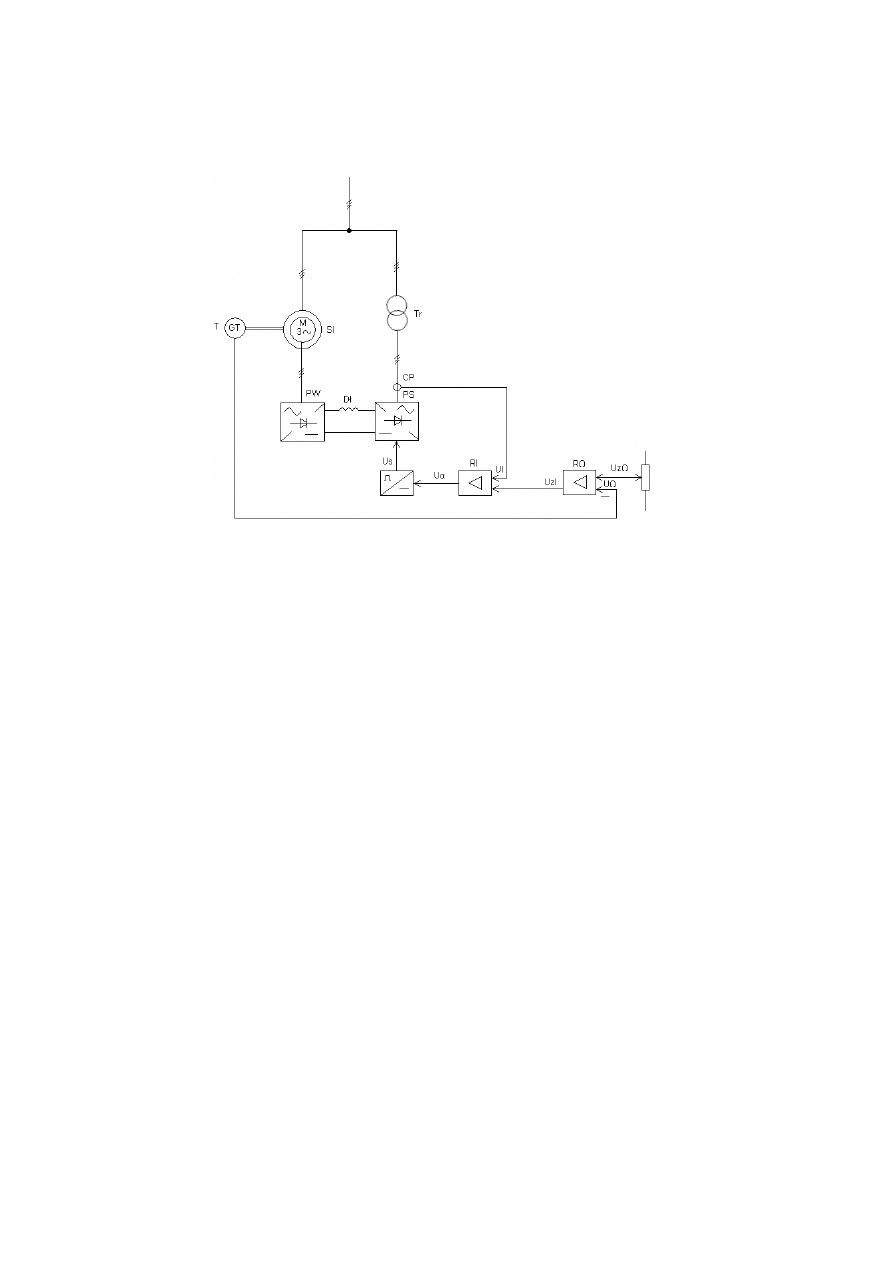
Przykładowy układ automatycznej regulacji pr
ę
dko
ś
ci i pr
ą
du w układzie
kaskadowym:
Wyszukiwarka
Podobne podstrony:
kaskada na stala moc, instrukcja
kaskada na stala moc instrukcja
Kaskada na stala moc (1)
Kaskada na stala moc
wypalanie kamienia wapiennego oraz ocena jakości produktu – wapna palonego. (3), materiały naukowe
ćwiczeniee 43, materiały naukowe do szkół i na studia, chemia fizyczna moja, Chemia fizyczna, Opraco
Otrzymywanie wapna palonego, materiały naukowe do szkół i na studia, technologia chemiczna sprawozda
20. Oznaczanie zawartosci wody w cialach stalych i cieczach, materiały naukowe do szkół i na studia,
Materialy dydaktyczne do cwiczenia nr 5
Ćwiczenie 3 Źródło rzeczywiste; dopasowanie odbiornika do źródła na maksymalną moc
wypalanie kamienia wapiennego oraz ocena jakości produktu – wapna palonego, materiały naukowe do sz
wykaz cwiczen, materiały naukowe do szkół i na studia, technologia chemiczna sprawozdania
16. Oznaczanie zawartosci tluszczu w nasionach oleistych, materiały naukowe do szkół i na studia, te
otrzymanie żywicy fenolowo-formaldehydowej, materiały naukowe do szkół i na studia, technologia chem
kolokwium, materiały naukowe do szkół i na studia, polimery chomikuj, polimery chomikuj
15. Otrzymywanie polistyrenu metoda perelkowa, materiały naukowe do szkół i na studia, technologia c
więcej podobnych podstron