1
15. Energia, pęd, kręt w ruchu ciała sztywnego.
Równoważność energii i pracy.
Twierdzenie Koeniga
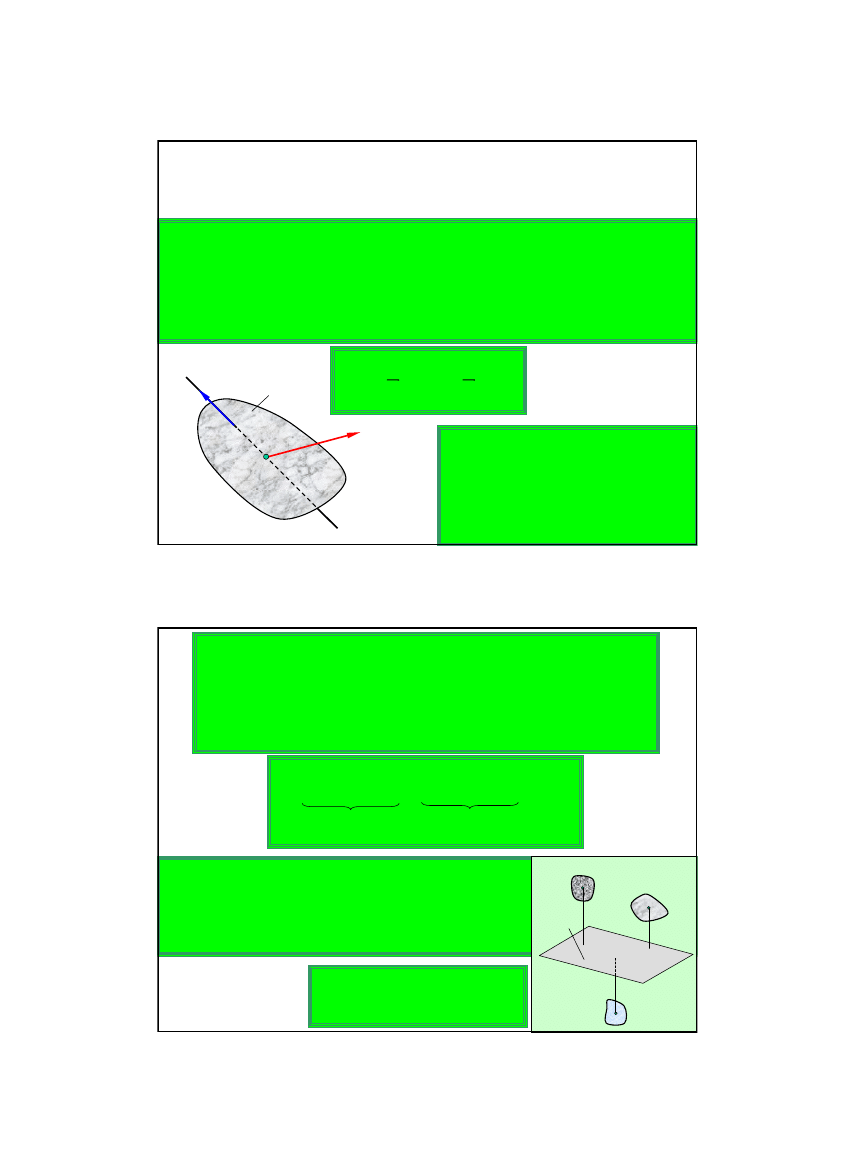
Energia kinetyczna
ciała sztywnego
równa jest sumie
energii kinetycznej ruchu postępowego z prędkością środka masy
i
energii ruchu obrotowego wokół osi przechodzącej przez środek
masy.
2
2
2
1
2
1
ω
υ
l
k
J
m
E
+
=
m
– masa ciała
J
l
– moment bezwładności
względem osi obrotu
Energia kinetyczna
układu ciał sztywnych
równa jest
sumie energii kinetycznych
poszczególnych ciał.
l
ω
ω
ω
ω
υ
υ
υ
υ
m
c
Przyrost energii mechanicznej
układu ciał sztywnych w skończonym przedziale czasu
równy jest
sumie prac sił zewnętrznych niepotencjalnych
działających układ.
( )
( )
(
)
( )
( )
(
)
( )
( )
1
2
2
,
1
1
1
2
2
m
m
p
k
p
k
E
E
W
E
E
E
E
=
+
−
+
Energia potencjalna układu znajdującego się w polu grawitacyjnym
równa jest
sumie iloczynów ciężarów poszczególnych ciał
i wzniesienia ich środków masy ponad dowolnie obrany poziom.
∑
∑
=
=
=
=
n
i
i
i
n
i
i
i
p
gh
m
h
Q
E
1
1
m
1
h
i
h
1
m
n
m
i
h
n
E
p
=0
2
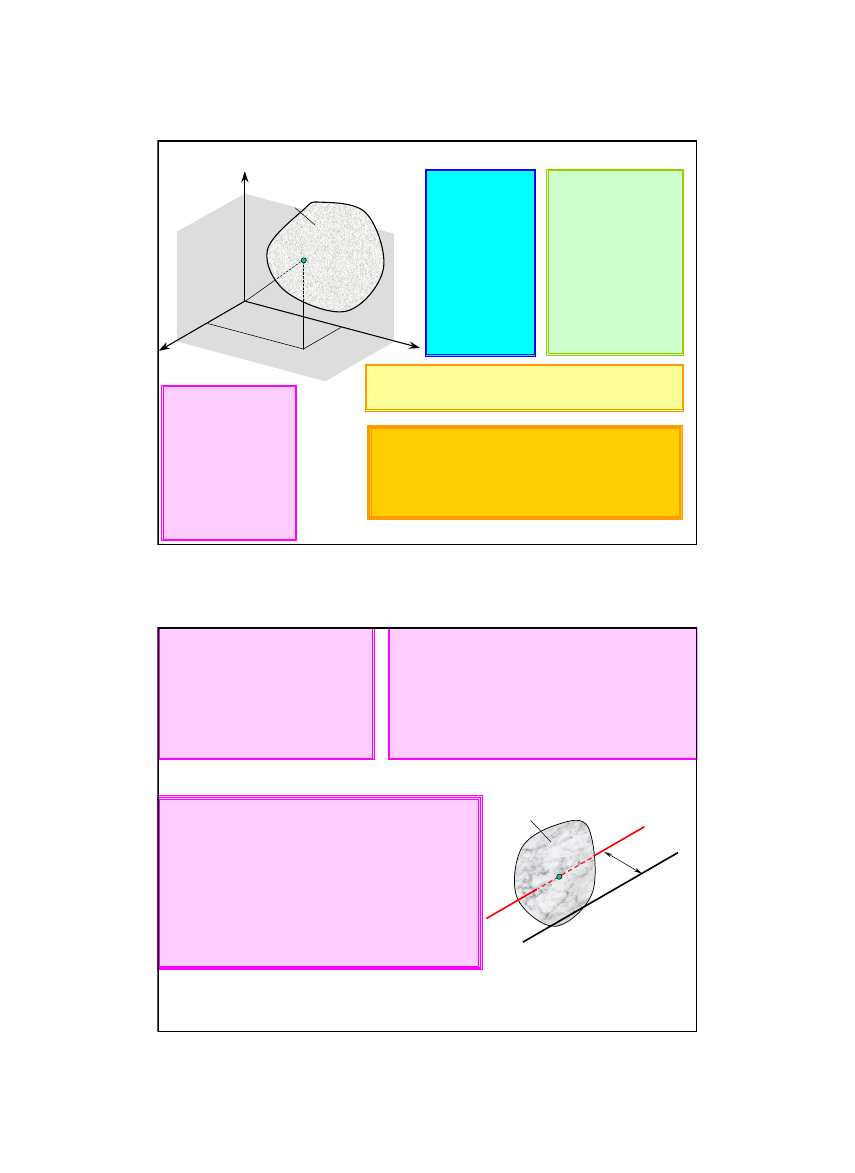
Momenty bezwładności
x
y
z
O
dm
m
y
x
z
r
π
1
π
2
π
3
względem
płaszczyzn
∫
∫
∫
=
=
=
m
m
m
dm
x
J
dm
y
J
dm
z
J
2
2
2
3
2
1
π
π
π
względem
osi
(
)
(
)
(
)
dm
y
x
J
dm
z
x
J
dm
z
y
J
m
z
m
y
m
x
∫
∫
∫
+
=
+
=
+
=
2
2
2
2
2
2
biegunowy
(
)
∫
∫
+
+
=
=
m
m
O
dm
z
y
x
dm
r
J
2
2
2
2
dewiacji
∫
∫
∫
=
=
=
=
=
=
m
xz
zx
m
zy
yz
m
yx
xy
zxdm
J
J
yzdm
J
J
xydm
J
J
[ ]
−
−
−
−
−
−
=
z
zy
zx
yz
y
yx
xz
xy
x
J
J
J
J
J
J
J
J
J
J
macierz
momentów
bezwładności
Twierdzenie Steinera
Moment bezwładności ciała materialnego względem
dowolnej osi równy jest
sumie momentu bezwładności względem osi
równoległej przechodzącej przez środek masy
oraz
iloczynu masy ciała i kwadratu odległości między
tymi dwiema osiami.
J
l
=J
lc
+mh
2
3
2
3
1
2
1
π
π
π
π
π
π
J
J
J
J
J
J
J
J
J
z
y
x
+
=
+
=
+
=
moment bezwładności względem
osi równy jest sumie momentów
bezwładności względem
wzajemnie prostopadłych
płaszczyzn przecinających się
wzdłuż tej osi
biegunowy moment bezwładności
równy jest sumie momentów
bezwładności względem trzech
wzajemnie prostopadłych płaszczyzn
przecinających się w biegunie
1
2
3
π
π
π
J
J
J
J
O
+
+
=
c
lc
l
h
m
3
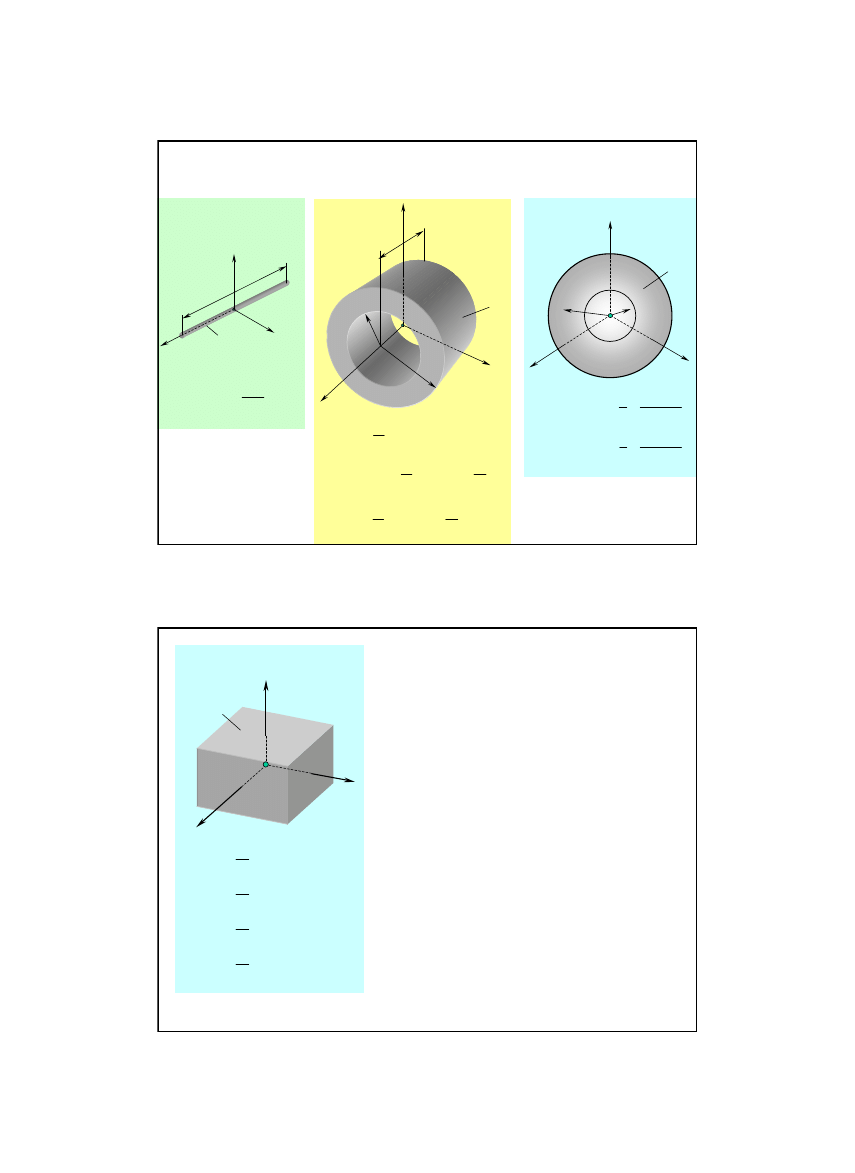
Momenty bezwładności wybranych brył jednorodnych
względem osi centralnych
c
x
y
z
l
m
cienki pręt
12
0
2
ml
J
J
J
z
y
x
=
=
=
z
y
x
c
r
R
l
m
cylinder
(
)
+
+
=
+
+
=
=
+
=
6
2
3
4
2
2
2
2
2
2
2
2
2
l
r
R
m
J
l
r
R
m
J
J
r
R
m
J
c
z
y
x
kula drążona
3
3
5
5
3
3
5
5
5
3
5
2
r
R
r
R
m
J
r
R
r
R
m
J
J
J
c
z
y
x
−
−
=
−
−
=
=
=
c
R
z
x
y
m
r
prostopadłościan
x
y
z
c
a
b
c
(
)
(
)
(
)
(
)
2
2
2
2
2
2
2
2
2
12
12
12
12
c
b
a
m
J
b
a
m
J
c
a
m
J
c
b
m
J
c
z
y
x
+
+
=
+
=
+
=
+
=
m
4
υ
υ
υ
υ
m
c
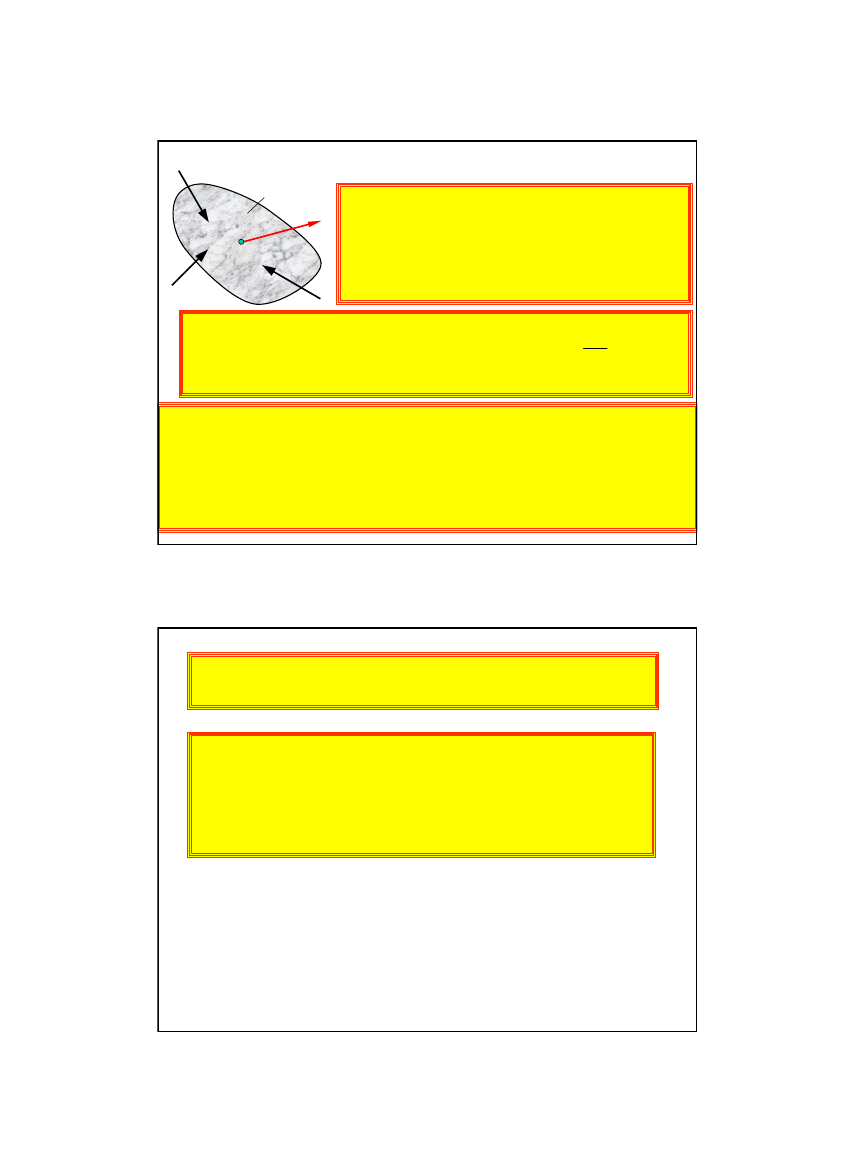
Pęd ciała sztywnego i układu ciał
Pęd ciała sztywnego równy jest iloczynowi
masy ciała
i prędkości jego środka masy
υ
r
r
m
p
=
Pochodna względem czasu pędu ciała sztywnego
równa jest sumie wszystkich sił zewnętrznych
działających na to ciało.
∑
=
=
n
i
i
F
dt
p
d
1
r
r
F
i
F
1
F
n
Przyrost pędu ciała sztywnego w skończonym przedziale czasu
równy jest sumie impulsów sił zewnętrznych działających na ciało.
(
)
∑ ∫
=
=
−
n
i
t
t
i
dt
F
m
1
1
2
2
1
r
r
r
υ
υ
Pęd układu ciał sztywnych równy jest iloczynowi
masy całkowitej układu i prędkości środka masy układu.
Twierdzenie o ruchu środka masy
Środek masy układu porusza się tak,
jakby w tym punkcie skupiona była cała masa układu
i jakby do tego punktu przyłożone były
wszystkie siły zewnętrzne.

5
c
m
l
ω
ω
ω
ω
Kręt ciała materialnego względem osi obrotu
równy jest iloczynowi
momentu bezwładności względem osi obrotu
i prędkości kątowej ciała.
ω
r
r
l
l
J
K
=
Kręt ciała sztywnego i układu ciał
x
y
z
m
c
ω
ω
ω
ω
[ ]
=
−
−
−
−
−
−
=
z
y
x
z
y
x
z
zy
zx
yz
y
yx
xz
xy
x
K
K
K
J
J
J
J
J
J
J
J
J
K
ω
ω
ω
Kręt ciała materialnego
względem środka masy
x
y
z
O
c
m
r
m
υ
υ
υ
υ
K
c
Kręt ciała materialnego względem
dowolnego bieguna O równy jest
sumie krętu względem środka
masy c oraz momentu względem
bieguna O wektora pędu
przyłożonego w środku masy
rozpatrywanego ciała.
υ
r
r
r
r
m
r
K
K
c
O
×
+
=
Pochodna względem czasu krętu układu
ciał materialnych względem środka masy
układu równa jest sumie momentów
wszystkich sił zewnętrznych względem
tegoż środka.
∑
=
=
n
i
ci
c
M
dt
K
d
1
r
r
6
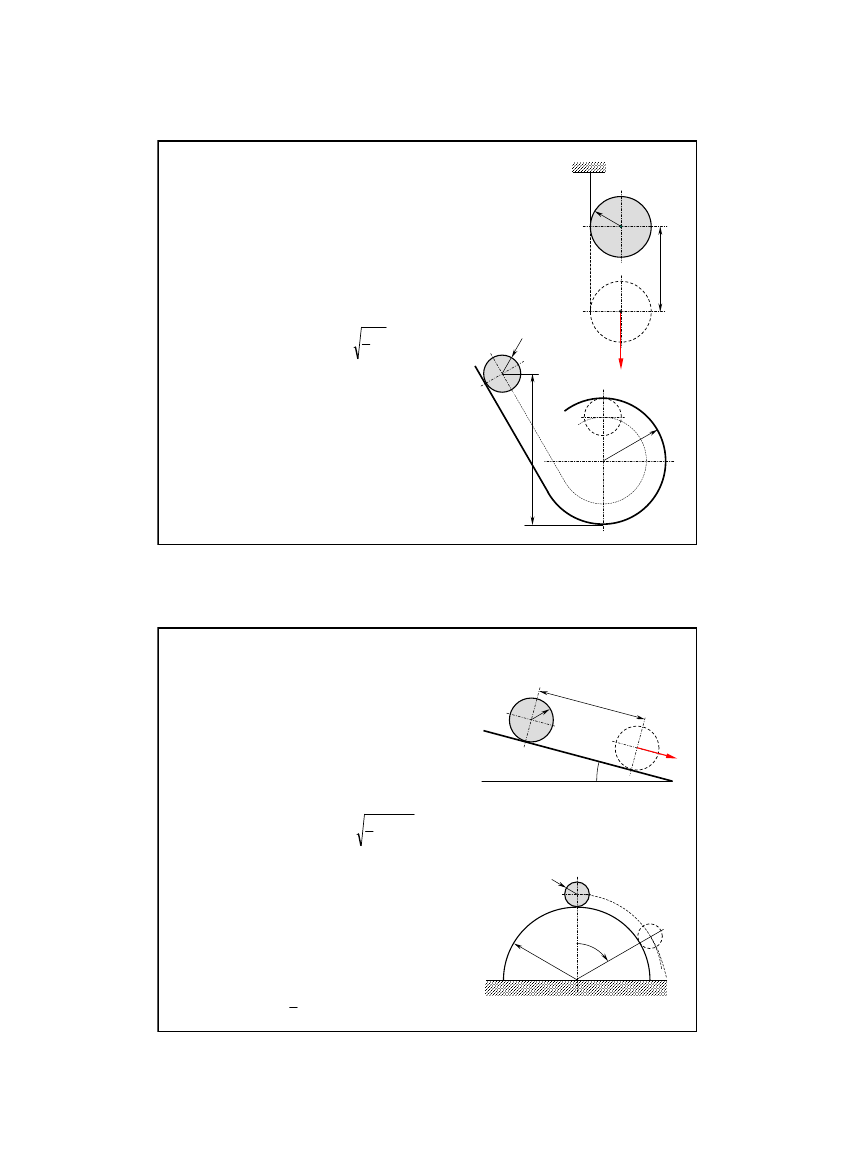
Zadanie 1/15
Jednorodny krążek o masie m i promieniu r
puszczono bez prędkości początkowej pozwalając mu
odwijać się z pionowo przebiegającej, nieważkiej nici.
Jaką prędkość υ uzyska środek O krążka po przebyciu
wysokość h?
h
r
m
υ
O
O
Zadanie 2/15
Z jakiej co najmniej wysokości h należy
puścić jednorodny wałek o masie m i
promieniu r aby, tocząc się bez poślizgu,
nie oderwał się w najwyższym punkcie
toru o promieniu R?
R
r
m
h
Odp.:
gh
3
4
=
υ
Zadanie 3/15
Jednorodny walec o masie m i
promieniu r, puszczony bez prędkości
początkowej, stacza się bez poślizgu po
równi nachylonej pod kątem α.
Jaką prędkość υ uzyska środek walca po
przebyciu drogi l?
α
r
m
l
υ
Zadanie 4/15
Z wierzchołka półwalca o promieniu R
stacza się bez poślizgu z pomijalnie małą
prędkością początkową jednorodny wałek
o masie m i promieniu r.
Przy jakim kącie α
0
wałek oderwie się od
półwalca?
R
r
m
α
0
Odp.:
o
2
.
55
7
4
arccos
0
≅
=
α
Odp.:
α
υ
sin
3
4
gl
=
7
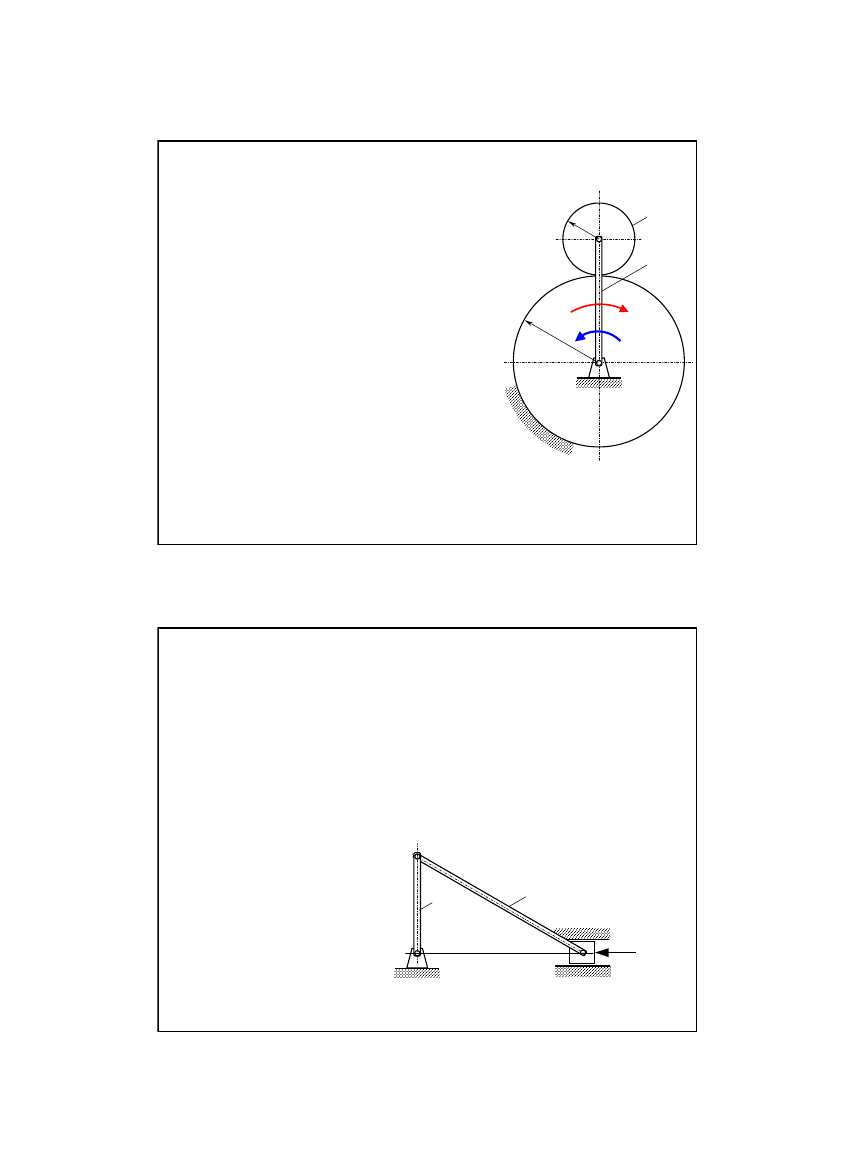
Zadanie 5/15
W położeniu mechanizmu pokazanym
na rysunku korba OA posiada prędkość
kątową ω.
Jaka będzie prędkość kątowa ω’ korby
w chwili, gdy punkt A zajmie najniższe
położenie, jeśli na korbę działa stały
moment hamujący M?
Jaka musi być wartość momentu M, aby
układ w tym położeniu pozostał
nieruchomy?
Korbę potraktować jako jednorodny
cienki pręt o masie m, zaś ruchome koło
jak jednorodny walec o masie m
1
i
promieniu r toczący się bez poślizgu po
nieruchomym kole o promieniu R.
R
r
A
O
ω
M
m
m
1
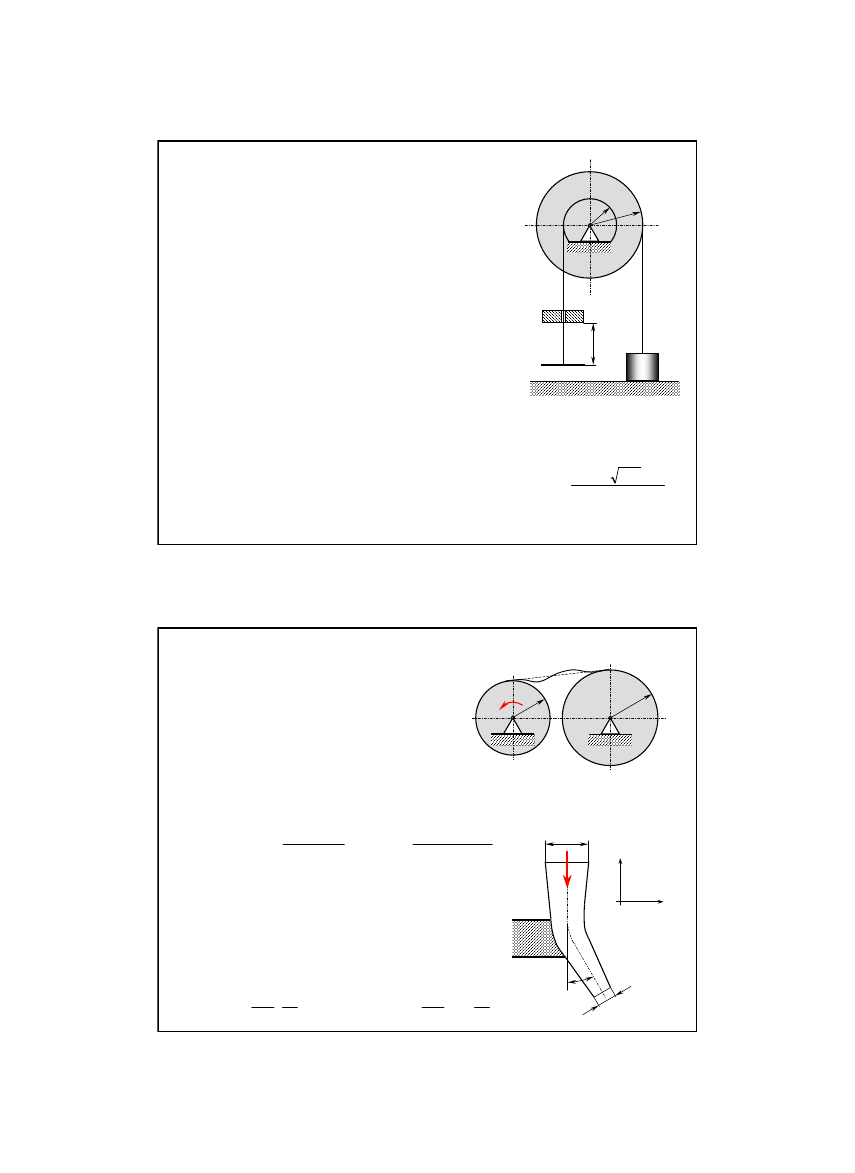
Zadanie 6/15
Mechanizm korbowy leżący w pionowej płaszczyźnie składa się z
korby OA o długości r i masie m
1
oraz korbowodu o długości l i
masie m
2
. W chwili, gdy punkt A zajmował najwyższe położenie
nadano mu pomijalnie małą prędkość skierowaną w prawo.
Obliczyć prędkość punktu A w chwili, gdy korba przyjmie poziome
położenie, jeśli na tłok B działa stała siła F=(m
1
+m
2
)g/4.
Masę tłoka zaniedbać. Korbę i korbowód potraktować jako
jednorodne, cienkie pręty.
B
F
O
A
r
l
m
1
m
2
8
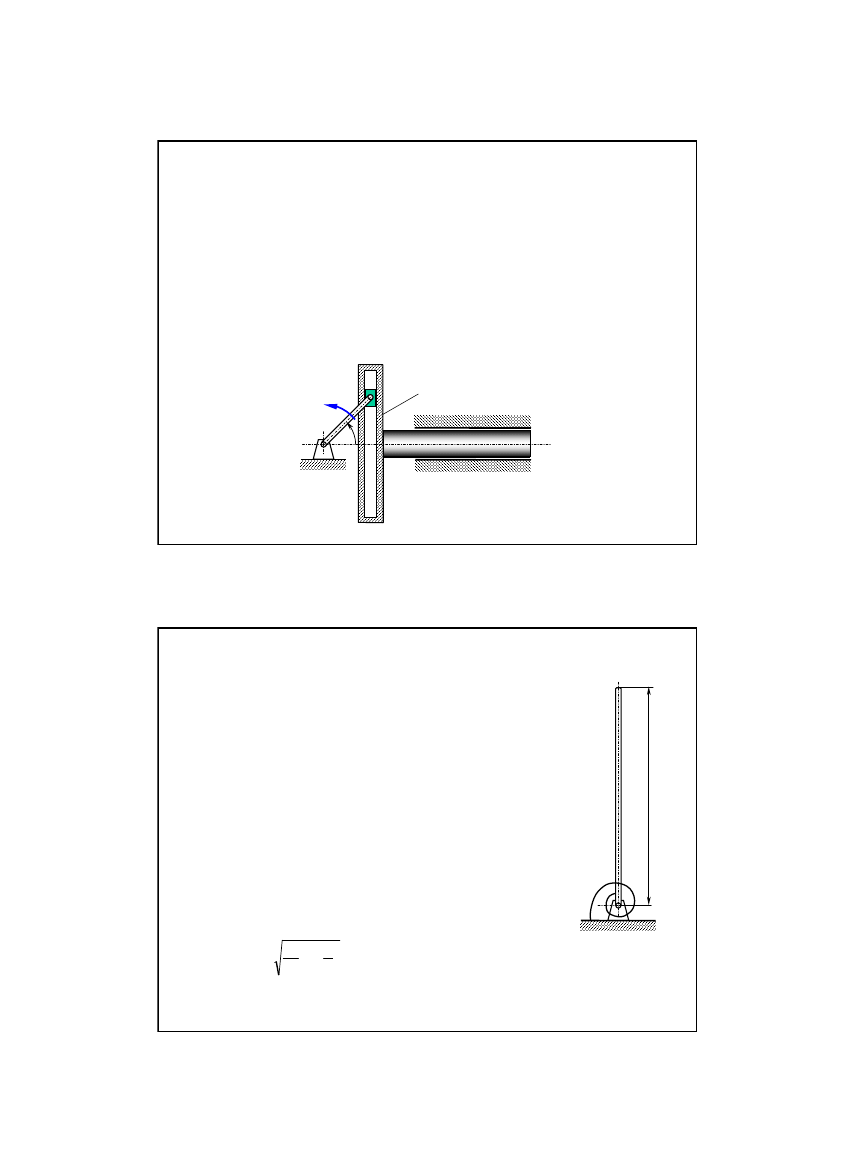
Zadanie 7/15
Na korbę OA mechanizmu korbowo-jarzmowego działa stały
moment obrotowy M. W chwili początkowej mechanizm znajdował
się w spoczynku w położeniu określonym przez kąt ϕ
0
.
Jaką prędkość korbową osiągnie korba po czasie jednego, pełnego
obrotu, jeśli jej długość wynosi r, moment bezwładności względem
osi obrotu J
0
, a masa jarzma równa jest m?
Przyjąć, że siła tarcia w prowadnicach jarzma jest stała i równa F.
Masę suwaka A pominąć.
O
A
ϕ
0
M
m
r
Zadanie 8/15
Jednorodny cienki pręt AB o długości 2a może
obracać się bez tarcia wokół poziomej osi A.
Do pręta zamocowana jest sprężyna spiralna o
takiej sztywności, że może utrzymać pręt
dokładnie w poziomym położeniu.
Z jaką prędkością kątową przejdzie pręt przez
położenie poziome, jeśli w początkowym
pionowym położeniu nadano mu pomijalnie
małą prędkość kątową, a sprężyna nie była
napięta?
A
B
2a
Odp.:
−
=
4
1
2
3
π
ω
a
g
9
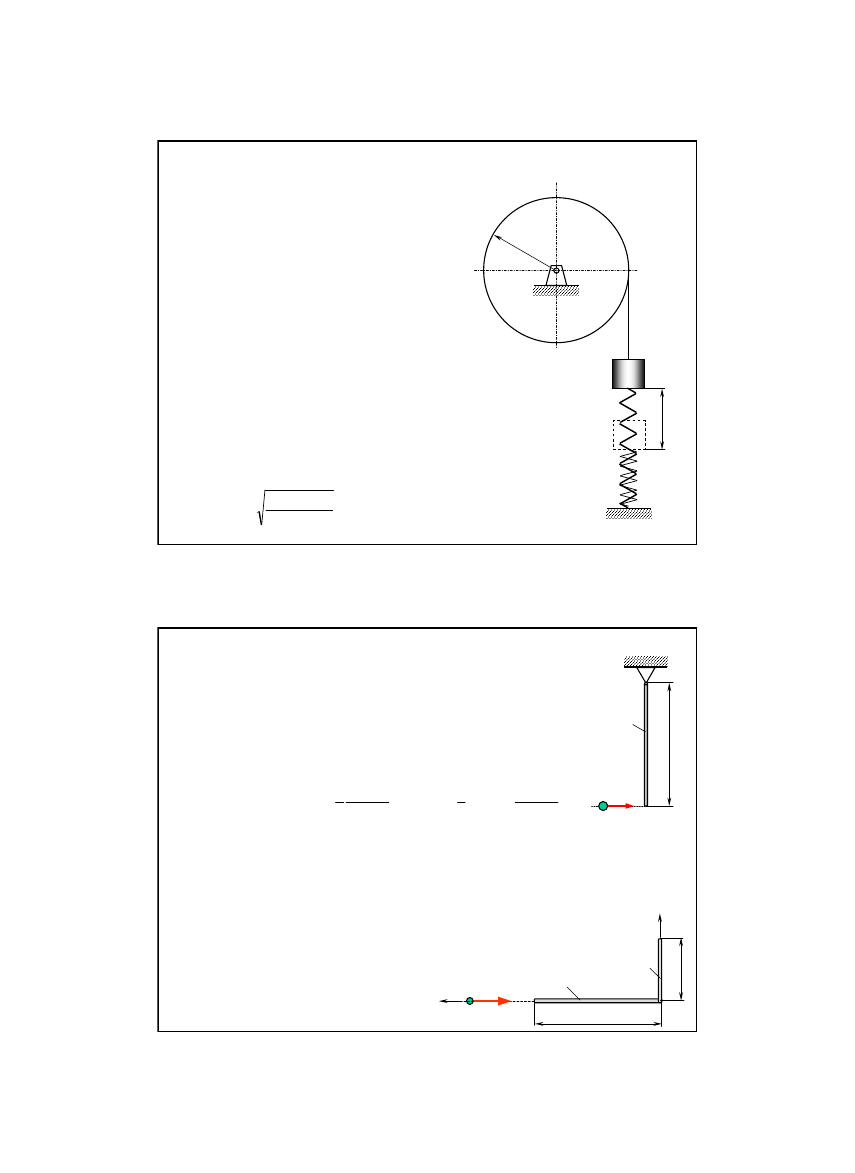
Zadanie 9/15
Na jednorodny cylinder o masie M i
promieniu R nawinięto nić, na końcu
której zawieszono masę m połączoną
z podłożem poprzez sprężynę o
sztywności c. Obracając cylinder
podniesiono masę m do położenia,
przy którym sprężyna została
rozciągnięta o długość s i puszczono
bez prędkości początkowej.
Obliczyć prędkość masy m w
położeniu, przy którym sprężyna nie
będzie napięta.
Masę nici i sprężyny pominąć.
R
M
m
s
c
Odp.:
m
M
cs
mgs
2
2
4
2
+
+
=
υ
Zadanie 10/15
Punkt o masie m uderza prostopadle z prędkością υ
0
w koniec B jednorodnego, cienkiego pręta AB o
masie M i długości l mogącego obracać się bez tarcia
wokół końca A i przykleja się do niego. Obliczyć
prędkość kątową ω pręta po uderzeniu oraz zmianę
∆
E
k
energii kinetycznej układu.
l
M
m
υ
υ
υ
υ
A
B
Odp.:
+
−
−
=
∆
+
=
m
M
m
m
E
m
M
m
l
k
3
3
1
2
1
3
3
2
υ
υ
ω
l
2
l
1
m
1
m
2
m
0
υ
0
x
y
Zadanie 11/15
Na gładkim stole spoczywają połączone ze sobą pod kątem prostym
jednorodne, cienkie pręty o masach i długościach odpowiednio:
m
1
=
1kg, l
1
=
1m oraz m
2
=
0.5kg, l
2
=0.5m.
W pierwszy w nich uderza z prędkością υ
0
=
1m/s punkt
materialny o masie m
0
=
1kg i przykleja się do jego końca.
Wyznaczyć ruch środka masy układu po zderzeniu oraz
zmianę
∆
E
k
energii kinetycznej układu.
Odp.: υ
x
=0, υ
y
=−0.4m/s, ω=0.107rad/s
∆
E
k
= −0.297J
10
O
r
2r
h
m
M
Zadanie 12/15
Układ składa się z bębna o promieniach r i 2r,
posiadającego względem osi obrotu moment
bezwładności J
0
oraz nawiniętych na nim
nieważkich, doskonale wiotkich linek, na
końcach których umocowano masę M oraz
nieważką szalkę. Jaką prędkość kątową ω
uzyska bęben, jeśli na szalkę spadnie z
wysokości h pierścień o masie m? Przed
opuszczeniem szalki układ był nieruchomy,
masa M spoczywała na podłożu a linka była
napięta.
Odp.:
2
2
0
4
2
Mr
mr
J
hg
mr
+
+
=
ω
r
2
r
1
m
1
m
2
ω
0
Zadanie 13/15
Na dwa jednorodne krążki o masach
i promieniach: m
1
, r
1
oraz m
2
, r
2
nawinięto nierozciągliwą, nieważką
linkę i poluzowano ją. Pierwszemu
krążkowi nadano prędkość kątową
ω
0
. Jakie prędkości kątowe ω
1
i ω
2
uzyskają krążki po szarpnięciu
linki oraz jaka będzie zmiana
∆
E
k
energii kinetycznej układu?
υ
1
d
1
d
2
α
x
y
Zadanie 14/15
Obliczyć reakcję kolana rury na podporę
jeśli dane są: prędkość wlotowa cieczy υ
1
,
ś
rednica wlotowa d
1
, średnica wylotowa d
2
,
gęstość cieczy ρ oraz kąt α.
Odp.:
(
)
2
2
2
1
1
2
1
1
0
2
2
2
1
1
1
1
0
1
r
r
m
r
m
r
m
r
m
r
m
r
m
+
=
+
=
ω
ω
ω
ω
Odp.:
2
1
2
2
1
2
1
2
1
2
2
1
2
1
cos
1
4
sin
4
υ
α
π
ρ
α
υ
π
ρ
−
−
=
−
=
d
d
d
R
d
d
d
R
y
x
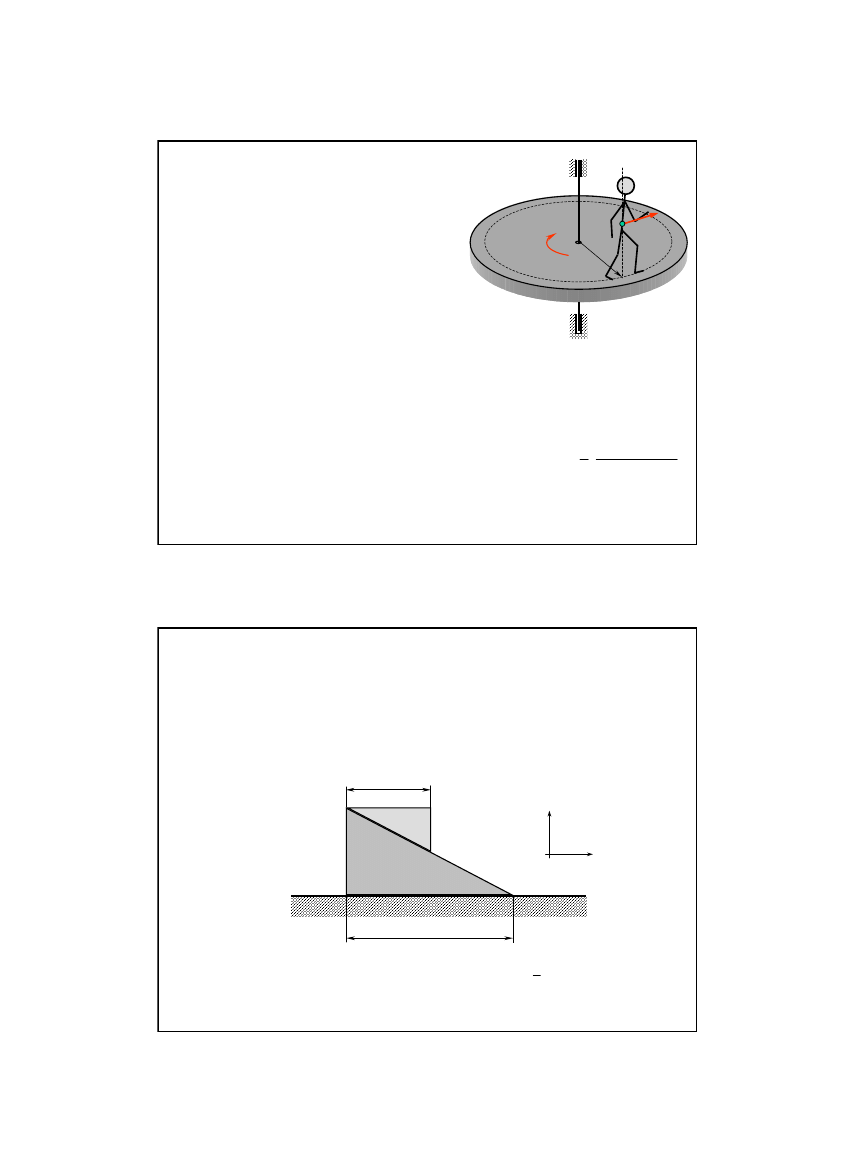
11
O
r
m
c
υ
ω
Zadanie 15/15
Na poziomo ustawionej, nieruchomej
tarczy mogącej obracać się bez tarcia
wokół pionowej osi stoi człowiek o
masie m
c
. Jaką prędkość kątową ω
uzyska tarcza jeśli człowiek zaczynie
iść wzdłuż okręgu o promieniu r z
prędkością υ względem tarczy?
Moment bezwładności tarczy względem osi obrotu równy jest J
0
,
zaś człowieka względem pionowej osi przechodzącej przez jego
ś
rodek ciężkości J
c
.
Odp.:
2
0
2
r
m
J
J
r
m
J
r
c
c
c
c
+
+
+
⋅
=
υ
ω
Zadanie 16/15
Na jednorodny klin o masie 4m i długości 2a, mogący ślizgać się
po gładkiej powierzchni, położono jak na rysunku klin o masie m
oraz długości a i puszczono bez prędkości początkowej. O ile
przesunie się klin dolny po zsunięciu się klina górnego?
2a
a
m
4m
x
y
Odp.:
a
x
5
1
=
∆
w lewo
Wyszukiwarka
Podobne podstrony:
Mechanika Techniczna I Skrypt 2 4 Kinematyka
Mechanika Techniczna I Skrypt 4 2 4 Układ belkowy złożony
Mechanika Techniczna I Skrypt 1 2 1 Okreslenie i rodz
Mechanika Techniczna I Skrypt 5 03
Mechanika Techniczna I Skrypt 3 14
Mechanika Techniczna I Skrypt 5 02
Mechanika Techniczna I Skrypt 3 7
Mechanika Techniczna I Skrypt 3 1
Mechanika Techniczna I Skrypt przyklady do rozwiazania id 291
Mechanika Techniczna I Skrypt 2 8 Prety, układy pretów
Mechanika Techniczna I Skrypt 5 10
Mechanika Techniczna I Skrypt 5 06
Mechanika Techniczna I Skrypt 3 12
Mechanika Techniczna I Skrypt 2 14 Zagadnienia wybrane
Mechanika Techniczna I Skrypt 1 7 1 Przedmiot dynamiki
Mechanika Techniczna I Skrypt 5 08
Mechanika Techniczna I Skrypt 3 9
Mechanika Techniczna I Skrypt 3 15
Mechanika Techniczna I Skrypt 1 2 7 Pochodna funkcji wektorowej
więcej podobnych podstron