
Studia I-ego stopnia
na kierunku
automatyka i robotyka
Plan studiów oraz programy przedmiotów przedstawione
w niniejszym dokumencie obowiązują studentów rozpoczynających
studia w roku akademickim 2007 / 2008 i latach następnych.
Wydział Automatyki, Elektroniki i Informatyki
Politechnika Śląska
Gliwice, 2007


SPIS TREŚCI
STUDIA NA KIERUNKU AUTOMATYKA I ROBOTYKA ............................................. 5
System kształcenia........................................................................................................... 6
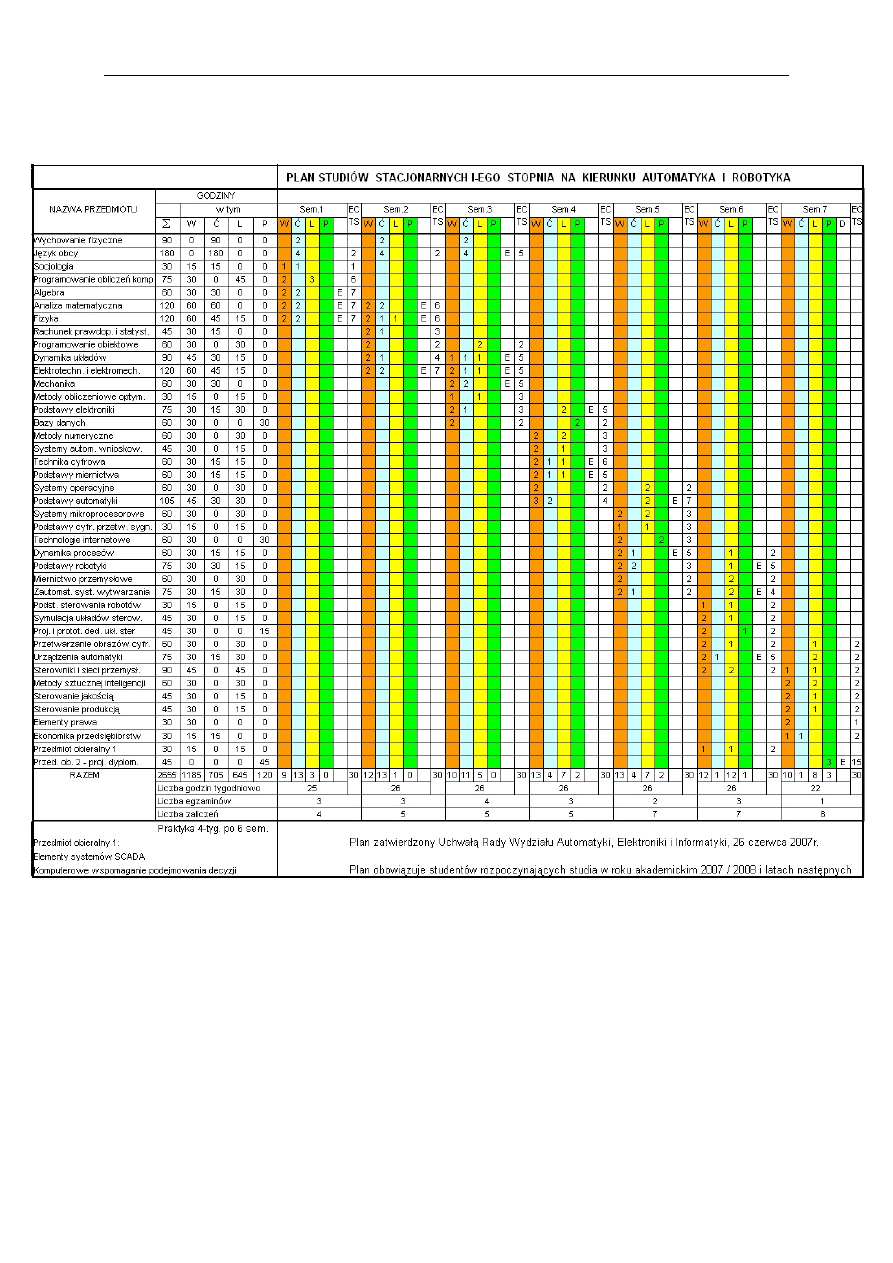
Plan studiów stacjonarnych ............................................................................................. 7
Plan studiów niestacjonarnych ........................................................................................ 9
Socjologia ...................................................................................................................... 12
Programowanie obliczeń komputerowych .................................................................... 14
Algebra .......................................................................................................................... 17
Analiza matematyczna................................................................................................... 21
Fizyka ............................................................................................................................ 24
Rachunek prawdopodobieństwa i statystyka matematyczna......................................... 28
Programowanie obiektowe ............................................................................................ 31
Dynamika układów........................................................................................................ 34
Elektrotechnika i elektromechanika .............................................................................. 37
Mechanika ..................................................................................................................... 41
Metody obliczeniowe optymalizacji.............................................................................. 44
Podstawy elektroniki ..................................................................................................... 46
Bazy danych .................................................................................................................. 49
Metody numeryczne ...................................................................................................... 52
Systemy automatycznego wnioskowania ...................................................................... 55
Technika cyfrowa .......................................................................................................... 58
Podstawy miernictwa..................................................................................................... 61
Systemy operacyjne....................................................................................................... 64
Podstawy automatyki..................................................................................................... 68
Systemy mikroprocesorowe .......................................................................................... 72
Podstawy cyfrowego przetwarzania sygnałów.............................................................. 75
Technologie internetowe ............................................................................................... 78
Dynamika procesów ...................................................................................................... 82
Podstawy robotyki ......................................................................................................... 86
Miernictwo przemysłowe .............................................................................................. 90
Zautomatyzowane systemy wytwarzania ...................................................................... 94
Podstawy sterowania robotów....................................................................................... 97
Symulacja układów sterowania ................................................................................... 100
Projektowanie i prototypowanie dedykowanych układów sterowania ....................... 102
Przetwarzanie obrazów cyfrowych.............................................................................. 106
Urządzenia automatyki................................................................................................ 109
Sterowniki i sieci przemysłowe................................................................................... 112
Metody sztucznej inteligencji...................................................................................... 116
Sterowanie jakością ..................................................................................................... 119
Sterowanie produkcją .................................................................................................. 122
Elementy prawa ........................................................................................................... 125
Ekonomika przedsiębiorstw ........................................................................................ 128
Komputerowe wspomaganie podejmowania decyzjii ................................................. 131
Elementy systemów SCADA ...................................................................................... 133

4
Program studiów na kierunku automatyka i robotyka
STUDIA NA KIERUNKU
AUTOMATYKA I ROBOTYKA

6
Program studiów na kierunku automatyka i robotyka
SYSTEM KSZTAŁCENIA
Na kierunku studiów automatyka i robotyka wprowadzony został trójstopniowy system
kształcenia dostosowany do standardów europejskich.
W ramach tego systemu prowadzone są studia I-ego stopnia, kończące się obroną pracy
dyplomowej inżynierskiej. Odpowiadają one standardom uniwersytetów zachodnich. Są
również zgodne ze standardami kształcenia na tym kierunku, które stanowią:
„Absolwenci studiów powinni posiadać wiedzę z zakresu informatyki, analizy sygnałów,
regulacji automatycznej, robotyki, algorytmów decyzyjnych i obliczeniowych. Powinni
posiadać umiejętnosci korzystania z: sprzetu komputerowego w ramach użytkowania
profesjonalnego oprogramowania inżynierskiego, jak i opracowywania własnych, prostych
aplikacji programowania i sterowników logicznych; sieci komputerowych i sieci
przemysłowych przy eksploatacji i do projektowania układów automatyki oraz systemów
sterowania i systemów wspomagania decyzji. Absolwenci powinni być przygotowani do
eksploatacji, uruchamiania i projektowania systemów automatyki i robotyki w różnych
zastosowaniach. Absolwenci powinni znać język obcy na poziomie biegłosci B2
Europejskiego Systemu Opisu Kształcenia Jezykowego Rady Europy oraz posiadać
umiejętności posługiwania się językiem specjalistycznym z zakresu kierunku kształcenia.
Absolwenci powinni być przygotowani do pracy w przemyśle chemicznym, budowy maszyn,
metalurgicznym, przetwórstwa materiałów, spożywczym, elektrotechnicznym
i elektronicznym oraz ochrony środowiska, a także w małych i średnich przedsiębiorstwach
zatrudniających inżynierów z zakresu automatyki oraz technik decyzyjnych. Absolwenci
powinni być przygotowani do podjecia studiów drugiego stopnia”.
Studia I-ego stopnia realizowane są zarówno w systemie stacjonarnym, jak również
niestacjonarnym
Przy tworzeniu programu nauczania stosowano kryteria FEANI (Fédération Européenne
d'Associations Nationales d'Ingénieurs).
Studia objęte są europejskim systemem punktów kredytowych ECTS.
OPIEKA MERYTORYCZNA
Instytut Automatyki
Sekretariat:
ul. Akademicka 16, pok. 534
44-100 Gliwice
tel.: (32) 2371051, (32) 2371553, (32) 237 2309
fax: (32) 2372127
e-mail : sekr_ia@polsl.pl, dydaktyka_ia@polsl.pl
www.ia.polsl. pl
Kształcenie na kierunku automatyka i robotyka
7
PLAN STUDIÓW STACJONARNYCH

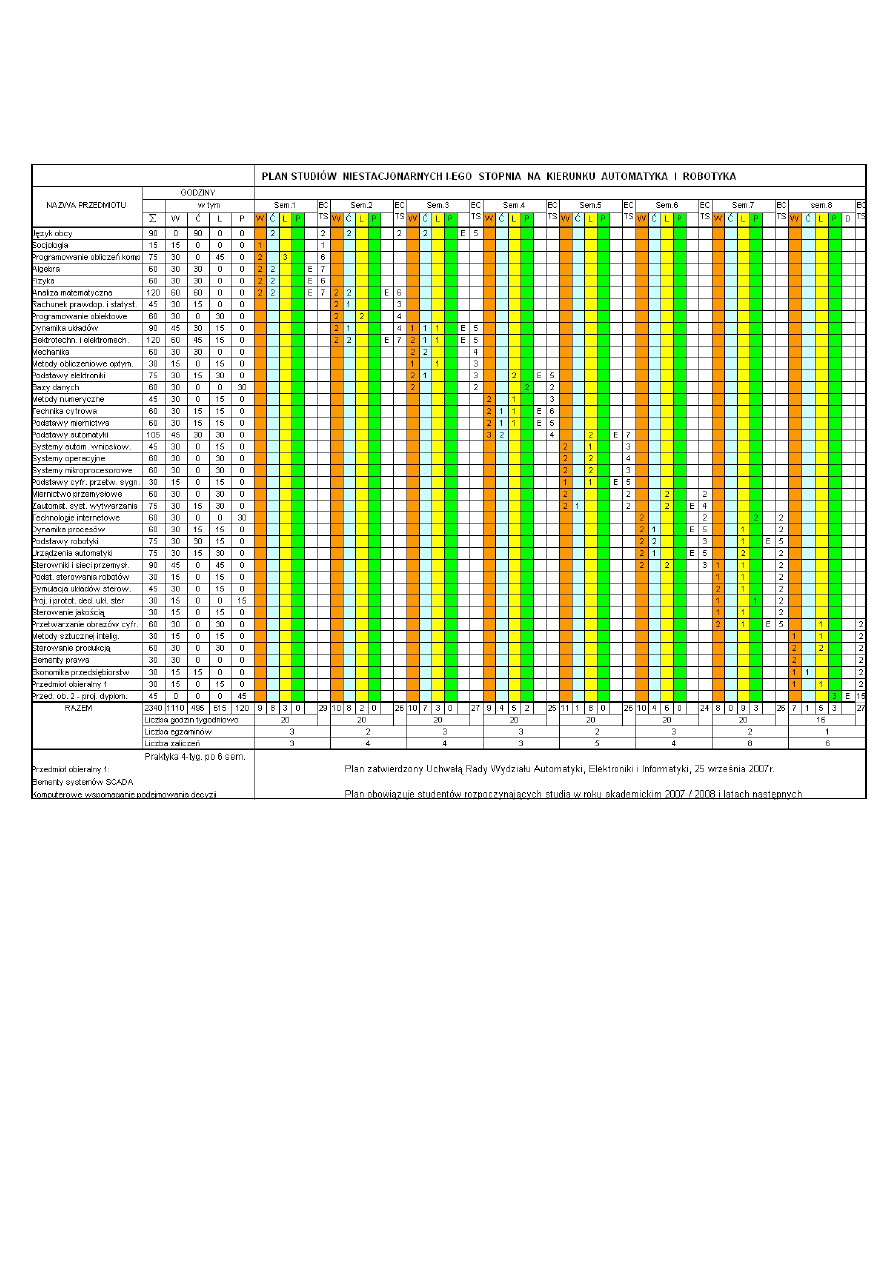
PLAN STUDIÓW NIESTACJONARNYCH

PROGRAMY PRZEDMIOTÓW
Podane rozkłady zajęć w semestrze dotyczą studiów stacjonarnych. Rozkład zajęć na
studiach niestacjonarnych odbywa się według planu studiów podanego na str. 9.

12
Program studiów I-ego stopnia na kierunku automatyka i robotyka
SOCJOLOGIA
Przedmiot obowiązkowy
Prowadzący Dr
Wacław Pluskiewicz
(waclaw.pluskiewicz@polsl.pl)
Rozkład
Semestr
1
W
1
Ćw
–
Lab
–
Proj
–
Sem
1
Egz
–
ECTS
1
Cel
Celem przedmiotu jest zapoznanie studentów z podstawowymi problemami
socjologii ogólnej. Opanowanie siatki terminologicznej pozwalającej na opis
oraz samodzielną interpretację zjawisk życia społecznego. Nabycie
umiejętności interpretacji klasycznych tekstów socjologicznych, a także
kształcenie sztuki formułowania własnych opinii o życiu społecznym
i komunikowania tych opinii w toku dyskusji.
Opis
Program przedmiotu obejmuje elementarne zagadnienia socjologii ogólnej.
W trakcie wykładów zostaną one zaprezentowane w ujęciu teoretycznym
wzbogaconym o przykłady, które odnoszą się do aktualnych zjawisk życia
społecznego. Więcej uwagi poświęci się problemom związanym z kierunkiem
studiów oraz procesom społecznym społeczeństw przemysłowych. W toku
seminariów studenci będą interpretować opisy zjawisk społecznych, którymi
zajmowali się klasycy socjologii. Następnie studenci kształcić będą swoje
umiejętności komunikacji społecznej, formułowania własnych poglądów
i rozumienia poglądów cudzych.
Słowa
kluczowe
Socjalizacja; więź społeczna; klasa; struktura społeczna; zmiana społeczna;
globalizacja.
Wykład
1. Przedmiot socjologii, jej geneza, czołowi przedstwaiciele, siatka terminologiczna, metody
badawcze, zakres przedmiotowy.
2. Jednostka w społeczeństwie, proces socjalizacji, najważniejsze koncepcje teoretyczne
socjalizacji; naturalistyczne teorie społeczeństwa; psychologizujące teorie jednostki.
3. Więź społeczna i jej mechanizmy; człowiek jako istota społeczna; typy społeczeństw ze
względu na dominujące w nich więzi społeczne; więź etniczna, więź obywatelska, więź
religijna.
4. Struktura społeczeństwa; kategorie opisujące nierówności społeczne: klasa, warstwa, stan,
kasta; teoria stratyfikacji; władza jako odmiana nierówności; odmiany władzy i jej
legitymizacja.
5. Zmiana społeczna; problem kierunku zmian społecznych; kryteria postępu społecznego:
ekonomiczne, intelektualne, jakości życia; granmice postępu społecznego; teoria „końca
historii”; teoria „zderzenia cywilizacji”.
6. Problemy społeczeństwa przemysłowego; cechy industrializmu: standaryzacja,
specjalizacja, synchronizacja, koncentracja, maksymalizacja, centralizacja; zmiana
charakteru pracy; zjawisko bezrobocia; problem czasu wolnego; społeczeństwo
informacyjne; granice wolności i kontroli społecznej; demokracja bezpośrednia; migracje
ekonomiczne i polityczne; nacjonalizmy, ksenofobia; problemy asymilacji.
7. Społeczne aspekty integracji europejskiej; idea uniwersalizmu europejskiego i jej
realizacje; idea partykularyzmu europejskiego i jej historia; źródła integracji europejskiej:

13
kulturowe, ekonomiczne, polityczne, strategiczne; przebieg procesu integracji;
perspektywy integracji; zagrożenia integracji i problemy Unii Europejskiej.
Seminarium
1. Przedmiot i podział socjologii według Znanieckiego. Socjologia jako rozrywka
intelektualna – Berger.
2. Socjobiologia – Wilson. Źródła zachowań ludzkiech według Lorenza.
3. Źródła społeczeństwa przemysłowego – Weber.
4. Wolność w społeczeństwie – Mannheim.
5. Teoria klasy próżniaczej – Veblen.
6. Współczesne społeczeństwo zewnątrzsterowne – Riesman.
7. Postęp technologiczny i jego skutki dla robotnika oraz inżyniera – Merton.
8. Etapy rozwoju techniki – Ortega y Gasset.
Metody nauczania
Wykład prowadzony metodą tradycyjną. Seminarium w formie analizy klasycznych
tekstów socjologicznych, wydobywania z nich hipotez badawczych oraz stanowisk autorów
i w oparciu o to prezentowanie własnych poglądów studentów.
Warunki zaliczenia
1. Sprawdzian pisemny z umiejętności analizy tekstu socjologicznego.
2. Aktywność merytoryczna w trakcie seminarium.
3. Obecności, zgodnie z Regulaminem Studiów.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu studentowi wystarcza
przygotowanie w zakresie przedmiotów społeczno – humanistycznych na poziomie szkoły
średniej.
Literatura podstawowa
1. Berger Peter – Zaproszenie do socjologii, PWN Warszawa.
2. Sztompka Piotr – Socjologia. Analiza społeczeństwa, Kraków 2002.
3. Broda Jerzy, Pluskiewicz Wacław – Socjologia. Wybór tekstów źródłowych. Skrypty
Politechniki Śląskiej, Gliwice 2003.
Literatura uzupełniająca
1. Szacki Jerzy – Historia myśli socjologicznej, PWN Warszawa.
SOCIOLOGY
Objective
The purpose of the course is to present basic problems of a general sociology. Cognition of
its terminology which lets one to describe and interpretate social phenomena.
Getting a skill
of interpretation classic sociological sources and also learnig how to formulate one's opinions
about social life and showing these opinions during discussion.
Description
The programme of the subject includes basic problems of a general sociology. They will be
presented during lectures, in theoretical and in practical ways too. A special attention will be
paid to problems connected with a particular field of studies and to social processes of
industrial societies. During seminars, students will interpret descriptions of social phenomena,
which was in the area of sociology classic’s interests. Next students will be improving their
own social communication skills, will learn how to formulate their opinions and how to
understand other people’s opinions.
Keywords
Socialization; social links; class; structure of society; social change; globalization.
14
Program studiów I-ego stopnia na kierunku automatyka i robotyka
PROGRAMOWANIE OBLICZEŃ KOMPUTEROWYCH
Przedmiot obowiązkowy
Prowadzący Prof. dr hab. inż. Mieczysław Metzger
(mieczyslaw.metzger@polsl.pl)
Rozkład Semestr
1
2
W
2
–
Ćw
–
–
Lab
3
–
Proj
–
1
Sem
–
–
Egz
–
–
ECTS
6
2
Cel
Celem przedmiotu jest praktyczne nauczenie studentów programowania
strukturalnego obliczeń inżynierskich na komputerach standardu PC, przy
wykorzystaniu języków C/C++ oraz Matlab.
Opis Ze
względu na olbrzymi materiał jaki jest zawarty w literaturze zakres
przedmiotu obejmuje specjalnie wyselekcjonowane, na podstawie wieloletniej
praktyki, wiadomości i umiejętności wystarczające do programowania w tych
językach obliczeń inżynierskich na PC. Aczkolwiek w ramach przedmiotu
wykorzystuje się języki C/C++ i Matlab to ogólna idea przedmiotu opiera się
na wyeksponowaniu cech charakterystycznych dla wszystkich języków
programowania.
Słowa
kluczowe
Programowanie obliczeń inżynierskich; komputery klasy PC; język C/C++;
Matlab.
Wykład
1. Idea programowania strukturalnego (struktura programu – schematy blokowe). Deklaracje
globalne i lokalnie; Standardowe typy zmiennych; Wyrażenia; Wymuszenie typu
wyrażenia; Instrukcje proste: instrukcje podstawienia; Komentarze; Instrukcje strukturalne:
warunkowe; Instrukcje iteracyjne – pętle (for; while; do...while); Instrukcja switch;
Omówienie wprowadzania i wyprowadzania danych; Biblioteki <stdio.h>, <iostream.h.>;
Omówienie standardu dla we/wy domyślnych: printf; scanf; formatowanie. Omówienie
idei strumieni dla C++ Borlanda oraz DevC++; Łatwiejsza obsługa i lepsza kontrola
we/wy; Strumienie cout, cin, cerr; Operatory << oraz >>; Wstawianie i wyjmowanie
elementów ze strumienia; Elementy: ”łańcuch”, wyrażenie, ”\n”, endl. Funkcja width i jej
użycie do formatowania; Funkcja precision.
2. Więcej o operatorach i ich hierarchii; Zmiana typu wyrażenia; Uwaga na typ wyniku przy
dzieleniu. Wprowadzenie do wskaźników i referencji.
3. Wprowadzenie do funkcji; Ogólna postać programu z funkcjami; Cechy języka;
Wykorzystanie funkcji w wyrażeniach; Wprowadzanie danych do funkcji (przez wartość);
Wyprowadzanie wyniku – return; Parametry formalne i aktualne; Zakres działania;
Deklaracja prototypów funkcji; Omówienie deklaracji static double; Zasłanianie;
Przekazywanie danych przez globalność; Przekazywanie przez parametry aktualne;
Program ilustrujący globalność i lokalność. Więcej o wykorzystaniu wskaźników;
Komunikacja z funkcją przy użyciu wskaźników; wskaźniki i referencje; Programy
przykładowe.
4. Złożone struktury danych; tablice jedno i wielowymiarowe; Deklaracja typu tablicowego;
Nazwa tablicy jako wskaźnik; Gromadzenie danych w tablicy; Wyciąganie danych z
tablicy; Elementy tablic w wyrażeniach i funkcjach; Obsługa plików dyskowych;
Deklaracja pliku FILE *we; Funkcje fopen, fprintf, fscanf. Otwieranie plików; Zapis do
pliku; Odczyt z pliku; Plik tekstowy jako pośrednictwo z innymi programami; otwarcie
pliku ze sprawdzeniem obecności; Program Przebieg; Operacje na plikach w c++ –
15
biblioteka <fstream.h>; Kreacja i otwarcie pliku; sterowanie strumieniami; Zamykanie
pliku. Zmienne dynamiczne, dynamiczne struktury danych.
5. Ogólna ideologia oprogramowania Matlab. Pokaz inicjacji tablic i najprostszych obliczeń.
Powiększanie macierzy; Wycinanie kawałków; Operacje macierzowe i tablicowe;
Funkcje i ich wykorzystanie; Globalność w środowisku Matlaba; Wprowadzanie danych
do funkcji; Zwracanie wyników; Grafika w Matlabie; Pokaz bardziej skomplikowanych
programów: iteracyjne rozwiązanie nieliniowego równania algebraicznego. Wykorzystanie
Matlaba do wykresów z programu obliczającego przebieg X(t) w C (zamiast przebiegu z
doświadczenia) – pośrednictwo jawnych plików tekstowych (można łatwo coś zmienić).
Wklejenie wykresów do Worda. Atrybuty obiektów graficznych; Demo zaawansowanych
programów (mini-środowisk windowsowych). Prezentacja wybranych toolboxów.
6. Uwagi ogólne o programowaniu, własnych aplikacjach i programach użytkowych. Języki
programowania mogące zagnieżdżać procedury napisane w C/C++ lub Matlabie. Języki
programowania. Programowanie według innych paradygmatów programowania –
programowanie obiektowe, programowanie graficzne, programowanie agentowe.
Zajęcia laboratoryjne
1. Podstawy języka C
•
Struktura programu w języku C
•
Pojęcie stałej i zmiennej
•
Podstawowe procedury wejścia i wyjścia
•
Praca z kompilatorem i debuggerem
•
Obliczanie wartości wyrażeń matematycznych
•
Operatory logiczne i ich zastosowanie
•
Wykorzystanie prostej instrukcji warunkowej
if
2. Wykorzystanie instrukcji warunkowych
•
Wykorzystanie instrukcji warunkowych if oraz switch
3. Instrukcje iteracyjne
•
wykorzystanie instrukcji iteracyjnych while, for, do..while
•
instrukcje sterujące break oraz continue
4. Złożone struktury danych cz. 1
•
tablice
5. Złożone struktury danych cz. 2
•
tablice cd.
•
pliki (podejście proceduralne)
•
wskaźniki, zmienne dynamiczne
6. Złożone struktury danych cz. 3
•
operacje na łańcuchach
•
typy złożone
7. Dynamiczne struktury danych. Zmienne dynamiczne (wykorzystanie funkcji malloc(),
realloc(), free() ; operatora sizeof() )
8. Funkcje cz. 1
•
funkcje
9. Funkcje cz. 2
•
przekazywanie tablic do funkcji
10. Matlab 1
11. Matlab 2
Zajęcia projektowe
1. Indywidualny program w języku C/C++. Dokumentacja. Instrukcja użytkownika.
2. Indywidualny program w języku Matlab. Dokumentacja. Instrukcja użytkownika.

16
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Wyposażenie laboratoryjne
Wykorzystanie sali wydziałowej – każdy student pracuje przy osobnym komputerze.
Metody nauczania
Wykład jest całkowicie przygotowany w PowerPoincie, wzbogacony o prezentacje
programów komputerowych w języku DevC++ (legalnie dostępnym w Internecie).
Laboratorium odbywa się w sekcjach rozliczeniowych przy czym każdy student ma do
dyspozycji osobny PC. Studenci opracowywują i implementują.zadane programy.
Warunki zaliczenia
Zaliczenie na podstawie oceny z laboratorium. Zaliczenie laboratorium na podstawie 10
kartkówek sprawdzających... przygotowanie do zajęć, oraz kolokwium zaliczeniowego.
Wstępne przygotowanie
Przedmiot na 1 semestrze.
Literatura podstawowa
1. B.Kernigham, D.Ritchie: Język C (7 wydań)
2. B. Eckel: Thinking in C++(w języku polskim), Helion, 2000.
3. J. Grębosz: Symfonia C++. Programowanie w języku C++ orientowane obiektowo.
Oficyna Kallimach, Kraków1999
4. Matlab user-manual
Literatura uzupełniająca
1. B. Stroustrup: Język C++. WNT Warszawa 1994
2. B. Stroustrup: Projektowanie i rozwój języka C++. WNT Warszawa,1994
Przedmiot ma własną stronę internetową z materiałami dydaktycznymi - w tym linki do
podręczników legalnie udostępnianych w Internecie
PROGRAMMATION OF ENGINEERING CALCULATIONS ON COMPUTERS
Objective
The major purpose of the course is to present basic engineering methods for program-
ming in C/C++ and Matlab languages.
Description
The area which is presented during one trimester, deals with all most important prob-
lems in programmation, that is solution of simple problems, as well as matrix operations
and graphical visualization of results of calculations. Basic concepts of programmation in
C/C++. Basic elements and structures in C/C++., Design of numerical calculations in Mat-
lab nvironment.
Keywords
Engineering methods for programming; C/C++ language; Matlab environment; visuali-
zation of results.

17
ALGEBRA
Przedmiot obowiązkowy
Prowadzący Dr
inż. Marek Żabka
(marek.zabka@polsl.pl)
Rozkład Semestr
1
W
2
Ćw
2
Lab
–
Proj
–
Sem
–
Egz
E
ECTS
7
Cel
Celem przedmiotu jest poznanie podstaw algebry, w szczególności liczb
zespolonych, algebry liniowej oraz geometrii analitycznej. Student nabiera
umiejętność działań na liczbach zespolonych, posługiwania się rachunkiem
macierzowym oraz przeprowadzania obliczeń związanych z krzywymi i po-
wierzchniami (w szczególności z prostymi i płaszczyznami) w przestrzeni trzy-
wymiarowej.
Opis
Elementy logiki; ciała i pierścienie; ciało liczb zespolonych; wielomiany;
zasadnicze twierdzenie algebry; permutacje; macierze i wyznaczniki; działania
na macierzach; rząd macierzy; przestrzeń liniowa; iloczyn skalarny wektorów;
ortogonalność; liniowa niezależność; baza; układy równań liniowych;
przekształcenia liniowe; jądro i obraz; wielomian charakterystyczny macierzy;
wartości własne; wektory własne; formy kwadratowe; postać Jordana
macierzy; macierz exp(A); wektory w R
3
; iloczyn skalarny, wektorowy,
mieszany; równoległość, prostopadłość, komplanarność wektorów; krzywe na
płaszczyźnie; układ biegunowy; prosta i płaszczyzna w przestrzeni i ich
wzajemne położenia; odległość punktu od płaszczyzny i od prostej, odległość
prostych skośnych; powierzchnie stopnia drugiego i ich równania;
współrzędne sferyczne i walcowe.
Słowa
kluczowe
Algebra; algebra liniowa; geometria analityczna; liczby zespolone; macierze;
wyznaczniki; płaszczyzna; prosta;
Wykład
Elementy logiki. Zdania, spójniki logiczne, reguły dowodzenia. Grupa, pierścień, ciało. Ciało
liczb zespolonych, działania na liczbach zespolonych. Argument, moduł. Postacie liczby
zespolonej: algebraiczna, trygonometryczna, wykładnicza.
Potęga liczby zespolonej i pierwiastek. Wzór Moivre’a. Wielomiany, zasadnicze twierdzenie
algebry.
Permutacje, iloczyn, parzystość. Macierze i wyznaczniki, podstawowe własności macierzy i
wyznaczników, działania na macierzach i wyznacznikach, rząd macierzy.
Macierze: zerowa, jednostkowa, dopełnień algebraicznych, transponowana, symetryczna,
skośnie symetryczna, odwrotna, ortogonalna, rzeczywista, urojona, unitarna.
Przestrzeń liniowa nad ciałem, podprzestrzeń, iloczyn skalarny, ortogonalność, liniowa
zależność i niezależność wektorów. Baza przestrzeni, współrzędne w bazie, zmiana bazy.
Układy równań liniowych. Wzory Cramera. Twierdzenie Croneckera-Capelliego. Metoda
Gaussa rozwiązywania układów równań.
Przekształcenie liniowe, macierz przekształcenia w bazie, macierze równoważne. Jądro i obraz
odwzorowania.
Równanie charakterystyczne macierzy, wartości własne, wektory własne. Twierdzenie
Hamiltona. Podobieństwo macierzy.
Formy kwadratowe, sprowadzanie do postaci kanonicznej. Formy kwadratowe określone
dodatnio i ujemnie.
18
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Postać Jordana macierzy, baza Jordana. Macierze exp(A) oraz A
n
.
Wektory w R
3
, współrzędne, rozkład na wersory. Iloczyn skalarny, wektorowy i mieszany,
interpretacje i własności.
Warunki równoległości, prostopadłości i komplanarności wektorów. Podział wektora w danym
stosunku.
Równanie krzywej na płaszczyźnie, uwikłane i parametryczne - przykłady. Układ biegunowy,
równania krzywych w układzie biegunowym, równanie powierzchni, powierzchnie walcowe.
Płaszczyzna, wzajemne położenie płaszczyzn. Odległość punktu od płaszczyzny. Prosta,
równanie prostej w przestrzeni, wzajemne położenie prostych, wzajemne położenie prostej i
płaszczyzny. Odległość punktu od prostej, odległość prostych skośnych.
Powierzchnie stopnia drugiego i ich równania. Współrzędne sferyczne i walcowe oraz ich
związek ze współrzędnymi kartezjańskimi.
Ćwiczenia tablicowe
1. Obliczenia modulo Z(n). Działania logiczne, rozpoznawanie tautologii tabelką.
Wykonywanie działań na liczbach zespolonych, rysowanie zbiorów liczb zespolonych.
Zmiana postaci liczb zespolonych.
2. Potęgowanie i pierwiastkowanie liczb zespolonych. Rozwiązywanie równań i nierówności.
Rozkład wielomianów na czynniki liniowe i kwadratowe.
3. Obliczanie iloczynów permutacji, sprawdzanie parzystości. Dodawanie i mnożenie
macierzy.
4. Obliczanie wyznaczników metodą Gaussa i Laplace’a. Odwracanie macierzy poprzez
macierz dopełnień oraz dzięki procesowi Gaussa.
5. Sprawdzanie liniowej zależności i niezależności wektorów, szukanie baz w przestrzeniach
liniowych. Sprawdzanie ortogonalności poprzez obliczanie iloczynu skalarnego
wektorów. Przeliczanie współrzędnych przy zmianie bazy.
6. Obliczanie rzędu macierzy. Rozwiązywanie układów równań liniowych wzorami Cramera
oraz metodą Gaussa.
7. Zastosowanie twierdzenie Croneckera-Capelliego. Rozwiązanie układu jako podprzestrzeń
liniowa. Przekształcenie liniowe, macierz przekształcenia w bazie, układ równań, a
odwzorowanie liniowe.
8. Sprawdzian pisemny.
9. Znajdowanie baz w jądrze i obrazie. Znajdowanie wartości własnych oraz wektorów
własnych.
10. Sprowadzanie do postaci kanonicznej form kwadratowych. Znajdowanie postaci Jordana
macierzy oraz bazy Jordana. Obliczanie macierze exp(A) oraz A
n
.
11. Obliczenia z wykorzystaniem iloczynu skalarnego, wektorowego i mieszanego bez
zadanego układu współrzędnych i w danym układzie. Sprawdzanie równoległości,
prostopadłości i komplanarności wektorów.
12. Zmiana postaci równanie krzywej na płaszczyźnie z uwikłanego na parametryczne i
odwrotnie. Zapis równań krzywych w układzie biegunowym.
13. Równania prostych i płaszczyzn spełniających podane warunki. Sprawdzanie wzajemnego
położenia prostych, płaszczyzn i punktów. Obliczanie części wspólnych płaszczyzn i
prostych. Obliczanie kątów między prostymi i płaszczyznami, obliczanie odległości
między prostymi, płaszczyznami i punktami.
14. Sprawdzian pisemny.
15. Rozpoznawanie powierzchni stopnia drugiego. Zapis równań powierzchni stopnia
drugiego. Używanie współrzędnych sferycznych i walcowych.
Metody nauczania
Wykład jest prowadzony tradycyjnie, uzupełniony jest materiałami dostępnymi w
Internecie, zawierającymi materiał wykładów wraz z przykładami i rysunkami.

19
Ćwiczenia tablicowe są prowadzone tradycyjnie, prowadzący przedstawia zadania, prosi
studentów o samodzielne rozwiązywanie wspomagane przez prowadzącego lub samodzielnie
przedstawia rozwiązanie lub jego elementy.
Warunki zaliczenia
Na ćwiczeniach przeprowadzone zostają dwa sprawdziany pisemne (testy plus zadania)
przygotowane przez wykładowcę, oceniane w punktach: pierwszy na maksimum 16 a drugi
na maksimum 18 punktów. Ponadto student może uzyskać 6 punktów za aktywny udział w
ćwiczeniach. Razem można zdobyć 40p. w czasie semestru, do zaliczenia ćwiczeń konieczne
jest uzyskanie 20p.
Egzamin końcowy ma postać pisemną – z częścią testową i zadaniową. Każda część
umożliwia zdobycie po 40p. Zaliczenie egzaminu wymaga zaliczenia każdej z części
egzaminu, na co najmniej 20p.
Ocena końcowa przedmiotu jest uzależniona od sumy punktów uzyskanych w czasie
semestru i w czasie egzaminu wg skali: dostateczny dla 60p–70p, plus dostateczny dla 70p–
80p, dobry dla 80p–90p, plus dobry dla 90p–105p oraz bardzo dobry dla 105p–120p.
Dla studentów, którzy nie zaliczyli ćwiczeń, będzie dodatkowy sprawdzian w czasie
egzaminów na 40p (minimum na zaliczenie to 20p.), co pozwoli zaliczyć cały przedmiot, lecz
końcowa ocena będzie obniżona o jeden stopień, nie niżej niż do dostatecznego.
Na ostatnim terminie poprawkowym część zadaniowa będzie na 30p. z progiem 12p,
natomiast będzie krótka część ustna na 15p.
Dla najlepszych studentów przewidywany jest termin zerowy egzaminu.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie szkoły średniej.
Literatura podstawowa
1. J. Klukowski, I. Nabiałek: Algebra dla studentów, WNT, Warszawa 1999r.
2. H. Arodź, K. Rościszewki: Algebra i geometria analityczna w zadaniach, Znak, Kraków
2005r.
3. W. Stankiewicz: Zadania z matematyki dla wyższych uczelni technicznych, Część A
PWN, Warszawa, 2006 r.
4. G. Banaszak, W. Gajda: Elementy algebry liniowej, część I i II, WNT, Warszawa 2002r.
5. M. Żabka: http://mat.polsl.pl/pracownicy/zabka (strona z hasłem, które jest podawane na
pierwszym wykładzie)
Literatura uzupełniająca
1. A.I. Kostrykin: Wstęp do algebry część 1. i część 2, PWN, Warsawa 2004r.
2. E. Kącki, D. Sadowska, L. Siewierski, Geometria analityczna w zadaniach, PWN,
Warszawa 1993r.
3. Zbiór zadań z algebry, praca zbiorowa pod red. A. I. Kostrykina, PWN Warszawa 2005r.
4. G. Kozłowska, M. Żabka, M. Żytka, Repetytorium matematyki elementarnej, skrypt
uczelniany nr 2165, Gliwice 1999r. (wydanie II)
ALGEBRA
Objective
Students get the basic knowledge of linear algebra, complex numbers and analytic geometry.
They learn to calculate with complex numbers, do matrices calculations and to use equations of
curves and surfaces (especially plains and lines).
Description
Fields and rings; field of complex numbers; polynomials; fundamental theorem of algebra.;
permutations; matrices and determinants, operations on matrices; rank of matrix; vector

20
Program studiów I-ego stopnia na kierunku automatyka i robotyka
spaces, dot products, normal vectors, linear independence of vectors; system of linear
equations; linear operators; kern and image; characteristic polynomial of matrix, eigenvalues
eigenvectors; quadratic forms; Jordan canonical form of matrix; matrix exp(A); vectors in 3-
dimentional space; dot and cross products; normal and parallel vectors; plain curves; polar co-
ordinates; plains and lines in 3-dimentional space; quadratic surfaces.
Keywords
Algebra; linear algebra; analytic geometry; complex numbers; matrices; determinants; plains;
lines.

21
ANALIZA MATEMATYCZNA
Przedmiot obowiązkowy
Prowadzący dr Iwona Nowak
(iwona.nowak@polsl.pl)
Rozkład Semestr
1
2
W
2
2
Ćw
2
2
Lab
–
–
Proj
–
–
Sem
–
–
Egz
E
E
ECTS
7
6
Cel
Celem przedmiotu jest zdobycie przez studentów wiedzy koniecznej do
samodzielnych, dalszych studiów w zakresie matematyki oraz nabycie
umiejętności niezbędnych do budowania modeli matematycznych opisujących
różne zjawiska fizyczne oraz rozwiązywania postawionych problemów.
Opis Pojęcie funkcji i jej własności; przestrzenie metryczne; ciągi w przestrzeniach
metrycznych; granica funkcji; ciągłość; rachunek różniczkowy funkcji jednej
i
wielu zmiennych; zastosowania rachunku różniczkowego; całka
nieoznaczona; całka Riemanna; całki niewłaściwe; całki wielokrotne; całka
krzywoliniowa nieskierowana; zastosowania całek; szeregi liczbowe
i funkcyjne; szeregi potęgowe; szeregi Taylora i Maclaurina; szeregi Fouriera.
Słowa
kluczowe
Funkcja; rachunek różniczkowy; rachunek całkowy; szeregi liczbowe, szeregi
funkcyjne.
Wykład
1. Ogólne pojęcie funkcji. Przykłady funkcji w różnych przestrzeniach. Pojęcie funkcji
odwrotnej, superpozycja funkcji. Metryka i przestrzeń metryczna.
2. Ciągi w przestrzeniach metrycznych, granica ciągu liczbowego.
3. Granica funkcji, granice jednostronne, granice niewłaściwe.
4. Ciągłość funkcji. Własności funkcji ciągłych. Jednostajna ciągłość.
5. Definicja pochodnej i jej interpretacja. Pojęcie różniczki i jej zastosowania.
6. Pochodne i różniczki rzędów wyższych. Podstawowe twierdzenia rachunku
różniczkowego. Wzór Taylora i Maclaurina.
7. Reguła de l’Hospitala. Ogólne badanie przebiegu zmienności funkcji.
8. Całka nieoznaczona. Definicja, własności. Metody całkowania.
9. Całkowanie funkcji wymiernych, niewymiernych, trygonometrycznych.
10. Całka Riemanna. Definicja, interpretacje, własności. Twierdzenie o wartości średniej.
Związek z całką nieoznaczoną. Całkowanie przez części. Zmiana zmiennych.
11. Całka niewłaściwa. Zastosowania całki oznaczonej.
12. Transformata Laplace’a. Definicja i podstawowe twierdzenia.
13. Rachunek różniczkowy funkcji wielu zmiennych. Pochodne cząstkowe funkcji wielu
zmiennych. Różniczka zupełna i jej zastosowania.
14. Pochodna funkcji złożonej i uwikłanej. Pochodne cząstkowe wyższych rzędów. Różniczki
wyższych rzędów.
15. Ekstrema funkcji dwu zmiennych. Pochodna kierunkowa. Gradient
16. Całki wielokrotne. Def. całek podwójnej i potrójnej, interpretacje, własności, obliczanie.
Zmiana zmiennych.
17. Szeregi. Szeregi liczbowe. Suma szeregu. Warunek konieczny zbieżności. Kryteria
zbieżności dla szeregów o wyrazach dodatnich.
18. Szeregi znakozmienne. Kryterium Leibniza. Szeregi bezwzględnie i warunkowo zbieżne.

22
Program studiów I-ego stopnia na kierunku automatyka i robotyka
19. Szeregi funkcyjne. Zbieżność zwykła i jednostajna. Kryterium Weierstrassa.
20. Szeregi potęgowe. Promień zbieżności szeregu potęgowego i jego wyznaczanie.
21. Szeregi Taylora i Maclaurina. Rozwijanie w szereg pewnych funkcji. Szeregi Fouriera dla
funkcji okresowej o okresie T. Wyznaczanie współczynników rozwinięcia.
22. Kryterium Dirichleta. Rozwijanie funkcji parzystej i nieparzystej w szereg.
Ćwiczenia tablicowe
W ramach ćwiczeń tablicowych utrwala się i ilustruje zadaniami materiał według
programu wykładu.
Metody nauczania
Wykład jest prowadzony metodą tradycyjną, prowadzący zapisuje na tablicy wypowiedzi
wszystkich definicji i twierdzeń, równocześnie omawiając szczegółowo przerabiany materiał.
Twierdzenia są dowodzone (o ile dowód nie wykracza poza materiał wykładu). Wszystkie
definicje i twierdzenia ilustowane są odpowiednimi przykładami.
Ćwiczenia tablicowe także prowadzone są metodą tradycyjną, prowadzący formułuje
zadania, które następnie rozwiązywane są przez studentów na tablicy (przy pomocy i pod
nadzorem prowadzącego)
Warunki zaliczenia
Zaliczenie ćwiczeń na podstawie dwóch kolokwiów, ocena modyfikowana jest
aktywnością.
Egzamin (po każdym semestrze) pisemny, dwuczęściowy: część zadaniowa, część
teoretyczna (test). Ocenę pozytywną z egzaminu student uzyskuje po pozytywnym zaliczeniu
obu części.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie matematyki na poziomie szkoły średniej.
Literatura podstawowa
1. Fichtenholz G.M.: Rachunek różniczkowy i całkowy, t. 1, 2
2. Grzymkowski R.: Matematyka
3. E. Łobos, B. Sikora: Calculus and differential equations in exercises
4. G.N. Berman: Zbiór zadań z analizy matematycznej
5. R. Grzymkowski: Matematyka – zadania i odpowiedzi
Literatura uzupełniająca
1. Kołodziej W.: Analiza matematyczna
2. Leja F.: Rachunek Różniczkowy i całkowy
3. Szałajko K.: Matematyka, t. 1, 2
4. Trajdos – Wróbel T.: Matematyka dla inżynierów
5. W. Krysicki, L. Włodarski: Zbiór zadań z analizy matematycznej
CALCULUS
Objective
A student will obtain a knowledge necessary for him to self-sufficient further study in
Mathematics. The obtained knowledge will enable to build the mathematical models, describe
various physical problems and to solve them.
Description
A function and its properties. Metric spaces. Sequences in the metric spaces. The
derivative calculus (ordinary and partial derivatives). The integral calculus (indefinite
integral, definite integral, improper integrals, multiple integrals, line integrals). The series of
numbers and functions. Power series. The Taylor series and the Maclaurin series. The Fourier
series.

23
Keywords
Function; the derivative calculus; the integral calculus; series of numbers; power series.

24
Program studiów I-ego stopnia na kierunku automatyka i robotyka
FIZYKA
Przedmiot obowiązkowy
Prowadzący Dr hab inż. Jerzy Bodzenta
(jerzy.bodzenta@polsl.pl)
Rozkład Semestr
1
2
W
2
2
Ćw
2
1
Lab
–
1
Proj
–
–
Sem
–
–
Egz
E
E
ECTS
7
6
Cel
Celem przedmiotu jest zaznajomienie studentów ze zjawiskami
i podstawowymi prawami fizyki. Ważne jest pokazanie zasad poprawnej
analizy problemów, wykształcenie umiejętności wyróżniania zjawisk
fizycznych zachodzących w złożonych układach i poprawnego ich opisu.
Zwraca się uwagę na zakres stosowalności przybliżeń. Kształcone są
umiejętności poprawnego wykonywania pomiarów i oceniania niepewności
pomiarowych.
Opis
Kinematyka i dynamika punktu materialnego i bryły sztywnej; siły
bezwładności; siły tarcia; elementy szczególnej teorii względności; pojęcie pola;
potencjalne pola sił; opis drgań; fale sprężyste; fale akustyczne; zjawisko
Dopplera; elementy teorii kinetyczno-molekularnej gazów; zasady
termodynamiki; właściwości elektryczne materii; pole magnetyczne; właściwości
magnetyczne materii; indukcja elektromagnetyczna; równania Maxwella; fale
elektromagnetyczne; elementy optyki geometrycznej i falowej; promieniowanie
cieplne; dualizm korpuskularno-falowy; elementy mechaniki kwantowej;
budowa atomu; promieniowanie wymuszone i zasada działania lasera; elementy
fizyki ciała stałego; metale; półprzewodniki; zjawiska kontaktowe; zjawiska
termoelektryczne.
Słowa
kluczowe
Mechanika; termodynamika; elektryczność; magnetyzm; optyka; mechanika
kwantowa; fizyka atomowa; fizyka ciała stałego; pomiary fizyczne.
Wykład
Fizyka - nauka o przyrodzie.
Ruch i jego opis (kinematyka ruchu postępowego i obrotowego). Przyczyny ruchu -
dynamika punktu materialnego i bryły sztywnej. Pęd i zasada zachowania pędu. Układy
inercjalne i nieinercjalne - siły bezwładności. Bryła sztywna - moment bezwładności.
Dynamika ruchu obrotowego bryły sztywnej. Moment pędu i zasada zachowania momentu
pędu. Precesja. Żyroskop. Ruch ciał z uwzględnieniem oporów ruchu. Zależność siły oporu
od prędkości. Zasada względności Galileusza.
Transformacja Galileusza. Niezmienniczość prędkości światła. Transformacja Lorentza.
Konsekwencje transformacji Lorentza. Składanie prędkości. II zasada dynamiki Newtona w
mechanice relatywistycznej. Związek masy i energii.
Centralne pola sił. Pole grawitacyjne i elektrostatyczne. Natężenie i potencjał pola.
Związek między natężeniem i potencjałem pola. Prawo Gaussa. Praca w polu centralnym.
Energia potencjalna i kinetyczna. Zasada zachowania energii mechanicznej.
Drgania harmoniczne - mechaniczne i elektryczne. Równanie ruchu harmonicznego.
Drgania nietłumione, tłumione i wymuszone. Rezonans. Logarytmiczny dekrement tłumienia.
Dobroć.

25
Fale sprężyste. Równanie falowe i jego rozwiązania dla fali płaskiej. Prędkość fal
sprężystych w ośrodku. Natężenie fali. Fale akustyczne. Czułość ucha. Poziom głośności.
Zjawisko Dopplera dla fal akustycznych.
Ruchy cieplne cząstek. Ciśnienie gazu na ściankę. Równanie stanu gazu doskonałego.
Zasada ekwipartycji energii. Rozkład Maxwella. Wzór barometryczny i rozkład Boltzmanna.
Rozkład Maxwella-Boltzmanna. Podstawowe zasady termodynamiki. Entropia. Cykl Carnota.
Potencjały termodynamiczne.
Zjawiska transportu. Dyfuzja, przewodnictwo cieplne, lepkość. Średnia droga swobodna i
współczynniki w równaniach transportu.
Pole elektrostatyczne w próżni i dielektrykach. Polaryzacja dielektryka - jej rodzaje.
Wektor indukcji elektrycznej. Objętościowe i powierzchniowe ładunki związane.
Ferroelektryki. Energia pola elektrycznego. Zjawisko piezoelektryczne. Przewodniki w polu
elektrycznym. Pojemność elektryczna. Kondensatory.
Pole magnetyczne. Prawo Biota-Savarta. Siła Lorentza. Prawo Ampere'a. Pole
magnetyczne w materii. Dia-, para- i ferromagnetyki. Samoindukcja i indukcja wzajemna.
Indukcyjność. Energia pola magnetycznego.
Zjawisko indukcji elektromagnetycznej. Prądy wirowe. Prąd przesunięcia. Równania
Maxwella dla pola elektromagnetycznego.
Fale elektromagnetyczne. Prędkość światła. Energia fal elektromagnetycznych.
Oddziaływanie fal elektromagnetycznych z materią. Prędkość grupowa i fazowa. Dyspersja.
Modulacja.
Optyka geometryczna. Prawa optyki geometrycznej. Zasada Fermata. Optyka falowa.
Zasada Huyghensa-Fresnela. Dyfrakcja. Interferencja. Fale stojące. Polaryzacja.
Promieniowanie cieplne. Prawo Kirchhoffa. Prawo Stefana-Boltzmanna. Prawo Wiena.
Wzór Rayleigha-Jeansa. Wzór Plancka. Korpuskularna natura światła. Zjawisko
fotoelektryczne zewnętrzne. Zjawisko Comptona.
Hipoteza de Broglie'a. Falowe własności cząstek. Zasada nieoznaczoności Heisenberga.
Równanie Schrödingera. Elektron w studni potencjału. Kwantowanie energii. Kwantowanie
momentu pędu. Oscylator harmoniczny. Zjawisko tunelowe.
Atom wodoru. Postulaty Bohra. Równanie Schrödingera dla atomu wodoru. Poziomy
energetyczne. Orbitalny moment magnetyczny atomu. Spin elektronu. Zakaz Pauliego.
Własności elektryczne i magnetyczne materii a budowa atomu.
Promieniowanie spontaniczne i wymuszone. Lasery. Własności promieniowania
laserowego.
Wiązania w ciałach stałych. Struktura pasmowa ciał stałych. Metale, półprzewodniki,
dielektryki. Gaz elektronowy. Kwantowa teoria elektronów swobodnych w metalu. Rozkład
Fermiego-Diraca. Fermiony i bozony. Przewodnictwo elektryczne metali. Prawo
Wiedemanna-Franza. Nadprzewodnictwo.
Półprzewodniki. Półprzewodniki samoistne i domieszkowe. Przewodnictwo elektryczne
półprzewodników. Generacja nośników w półprzewodnikach.
Praca wyjścia. Kontaktowa różnica potencjałów. Zjawiska termoelektryczne.
Złącze p-n. Zasada działania diody i tranzystora. Fotoogniwo.
Ćwiczenia tablicowe
1. Kinematyka punktu materialnego: wektor położenia, prędkości i przyspieszenia.
2. Zasada niezależności ruchów, opis ruchu w układzie związanym z torem.
3. Kinematyka bryły sztywnej.
4. Zasady dynamiki Newtona.
5. Inercjalne i nieinercjalne układy odniesienia. Siły bezwładności.
6. Dynamika bryły sztywnej. Precesja.
7. Zasada zachowania pędu. Zasada zachowania momentu pędu.

26
Program studiów I-ego stopnia na kierunku automatyka i robotyka
8. Zasada zachowania energii mechanicznej.
9. Transformacja Lorentza. Masa i pęd w mechanice relatywistycznej. Związek masy i
energii.
10. Potencjalne pola sił. Pole grawitacyjne i elektrostatyczne. Prawo Gaussa.
11. Drgania harmoniczne. Drgania tłumione i wymuszone. Drgania w obwodzie RLC.
12. Fale sprężyste. Natężenie fali.
13. Fale akustyczne, poziom głośności. Zjawisko Dopplera.
14. Ruchy cieplne molekuł. Rozkład prędkości Maxwella. Wzór barometryczny i rozkład
Boltzmanna.
15. Równanie stanu gazu doskonałego. Przemiany gazu doskonałego.
16. Zasady termodynamiki. Sprawność maszyn cieplnych. Związek między liczbą stopni
swobody i ciepłem molowym.
17. Zjawiska transportu.
18. Pole magnetyczne. Prawo Biota-Savarta. Prawo Ampere'a.
19. Siły działające na cząstki naładowane w polu elektrycznym i magnetycznym.
20. Zasada indukcji elektromagnetycznej. Równania Maxwella.
21. Fale elektromagnetyczne. Wektor Poyntinga.
22. Energia fal elektromagnetycznych.
23. Interferencja światła.
24. Dyfrakcja światła. Polaryzacja światła.
25. Promieniowanie cieplne.
26. Kwantowa natura światła.
27. Falowe własności cząstek. Zasada nieoznaczoności Heisenberga.
28. Równanie Schrödingera.
29. Atom wodoru. Postulaty Bohra. Poziomy energetyczne. Orbitalny moment magnetyczny
atomu. Spin elektronu.
30. Gaz elektronowy w metalach. Przewodnictwo elektryczne i cieplne metali. Prawo
Wiedemanna-Franza.
Zajęcia laboratoryjne
1. Wyznaczenie temperatury Curie ferrytów
2. Wyznaczenie parametrów złącza p-n
3. Zjawisko Halla
4. Wyznaczanie szerokości przerwy energetycznej metodą termiczna (termistor)
5. Wrażenie barwy a widmo światła
6. Zależność lepkości wody od temperatury
7. Analiza drgań harmonicznych struny
8. Pomiar prędkości dźwięku za pomocą puzonu
9. Wahadło matematyczne
10. Wyznaczenie współczynnika załamania światła w powietrzu
11. Pochłanianie promieniowania gamma
12. Wyznaczanie charakterystyki Licznika Geigera-Müllera
Wyposażenie laboratoryjne
Pracownia fizyczna wyposażona w typowy sprzęt pomiarowy i gotowe zestawy
demonstracyjne, umożliwiające studentom samodzielne wykonywanie doświadczeń.
Metody nauczania
Wykład jest prowadzony w sposób tradycyjny, ilustrowany demonstracjami wybranych
zjawisk fizycznych, krótkimi filmami oraz prezentacjami multimedialnymi.
Ćwiczenia tablicowe prowadzone są metodą tradycyjną, prowadzący formułuje zadania,
które studenci rozwiązują samodzielnie. Prowadzący udziela niezbędnej pomocy
naprowadzając na właściwy sposób rozumowania.

27
Laboratorium odbywa się w sekcjach dwuosobowych lub trzyosobowych. Studenci
wykonują samodzielnie pomiary, a następni każdy przygotowuje własne sprawozdanie. Przed
przystąpieniem do wykonania ćwiczeń prowadzący sprawdza przygotowanie teoretyczne
studentów.
Warunki zaliczenia
Zaliczenie ćwiczeń tablicowych - na podstawie pisemnych sprawdzianów przeprowadzanych
w trakcie zajęć lub sprawdzianów poprawkowych.
Zaliczenie laboratorium - na podstawie zaliczenia wszystkich ćwiczeń laboratoryjnych.
Egzamin – w formie ustnej, po uprzednim zaliczeniu ćwiczeń tablicowych.
Wstępne przygotowanie
Przygotowanie z matematyki i fizyki w zakresie szkoły średniej.
Literatura podstawowa
1. Jerzy Bodzenta, Wykłady z fizyki, Wydawnictwo Pracowni Komputerowej Jacka
Skalmierskiego, Gliwice 2004.
2. Sz. Szczeniowski, Fizyka doświadczalna, tom I-VI, PWN, Warszawa 1966.
Literatura uzupełniająca
1. Igor Sawieljew, Kurs Fizyki, cz. I. Mechanika. Fizyka cząsteczkowa, PWN, Warszawa
1987.
2. Igor Sawieljew, Kurs Fizyki, cz. II. Elektryczność i magnetyzm. Fale. Optyka, PWN,
Warszawa 1989.
3. Igor Sawieljew, Kurs Fizyki, cz. III. Optyka kwantowa. Fizyka atomowa, ciała stałego,
jądra atomowego i cząstek elementarnych, PWN, Warszawa 1989.
4. G.L. Squires, Praktyczna fizyka, Wydawnictwo Naukowe PWN, Warszawa 1992.
5. Wyrażanie niepewności pomiaru. Przewodnik, Główny Urząd Miar.
PHYSICS
Objective
The aim of this course is introducing students to physical effects and basic physical laws.
An important goal is also demonstration of rules of proper analysis and description of
different specific problems. Students learn how to divide complex problems into separate
effects. Attention is paid to applicability of approximations. In physics laboratory students
acquire experience in measurements, estimation of uncertainties and preparing reports.
Description
Kinematics and dynamics of point object and rigid body; forces of inertia; friction forces;
elements of special theory of relativity; fields; potential fields of forces; description of vibrations;
elastic waves; acoustic waves; Doppler effect; principles of thermodynamics; electrical
properties of matter; magnetic field; magnetic properties of matter; electromagnetic induction;
Maxwell’s equations; elements of geometric and wave optics; thermal radiation; particle-wave
duality; elements of quantum mechanics; atomic structure; stimulated emission and principle of
laser operation; elements of solid state physics; metals; semiconductors; contact effects;
thermoelectric effects.
Keywords
Mechanics; thermodynamics; electricity; magnetism; optics; quantum mechanics; atomic
physics; solid state physics; physical measurements.
28
Program studiów I-ego stopnia na kierunku automatyka i robotyka
RACHUNEK PRAWDOPODOBIEŃSTWA I STATYSTYKA
MATEMATYCZNA
Przedmiot obowiązkowy
Prowadzący Dr hab. inż. Adam Czornik
(adam.czornik@polsl.pl)
Rozkład Semestr
2
W
2
Ćw
1
Lab
–
Proj
–
Sem
–
Egz
–
ECTS
3
Cel
Celem przedmiotu jest nauczenie studentów podstaw rachunku
prawdopodobieństwa i statystyki matematycznej potrzebnych w praktyce
inżynierskiej. Szczególny nacisk położony jest na opis empiryczny i
zastosowania praktyczne. Celem wykładu jest również rozwinięcie intuicji
studentów i umiejętności formułowania problemów praktycznych w języku
probabilistycznym.
Opis
Aksjomatyczna definicja przestrzeni probabilistycznej; elementy
kombinatoryki; niezależność zdarzeń; twierdzenie o prawdopodobieństwie
całkowitym; twierdzenia Bayesa; zmienne losowe i ich charakterystyki
liczbowe-wartość oczekiwana, wariancja, momenty wyższych rzędów;
niezależność zmiennych losowych i współczynnik korelacji; typy zbieżności
ciągów zmiennych losowych; centralne twierdzenie graniczne i prawa
wielkich liczb; statystyka opisowa; populacja ogólna; próba prosta; statystyki;
estymator i ich klasyfikacja; pojęcie hipotezy statystycznej - hipotezy
parametryczne i nieparametryczne; podstawowe testy statystyczne- testy
dotyczące wartości oczekiwanej, wariancji, współczynnika korelacji.
Słowa
kluczowe
Rachunek prawdopodobieństwa; kombinatoryka; statystyka matematyczna;
estymacja; testowanie hipotez.
Wykład
Aksjomatyczna definicja prawdopodobieństwa, przypadek skończenie elementowej
przestrzeni probabilistycznej, niezależność zdarzeń, wzór na prawdopodobieństwo całkowite i
wzór Bayesa. Elementy kombinatoryki- permutacje, kombinacje i wariacje. Zmienne losowe-
dystrybuanta zmiennej losowej, podstawowe typy rozkładów zmiennych losowych
dyskretnych i ciągłych, wartość oczekiwana, wariancja i inne charakterystyki liczbowe.
Rozkład normalny. Niezależność zmiennych losowych- podstawowe twierdzenia dotyczące
zmiennych losowych niezależnych, współczynnika korelacji, niezależność a korelacja. Typy
zbieżności ciągów zmiennych losowych- zbieżność z prawdopodobieństwem 1, zbieżność
według prawdopodobieństwa, słaba zbieżność i zbieżność średniokwadratowa, centralne
twierdzenie graniczne, silne i słabe prawo wielkich liczb. Statystyka opisowa, populacja
ogólna, próba prosta, statystyki. Estymatory- metody uzyskiwania; testy statystyczne- testy
dotyczące wartości oczekiwanej, wariancji, współczynnika korelacji, test serii, eliminacja
wyników wątpliwych.
Ćwiczenia tablicowe
1. Obliczanie prawdopodobieństw zdarzeń w przypadku skończenie elementowej przestrzeni
probabilistycznej
2. Wykorzystanie wzoru Bayesa do oblicznia prawdopodobieństw
3. Wykorzystanie wzoru na prawdopodobieństwo całkowite
4. Badanie niezależności zdarzeń
29
5. Obliczanie charakterystyk liczbowych zmiennych losowych o rozkładach dyskretnych i
ciągłych.
6. Badanie rozkładów funkcji zmiennych losowych.
7. Rozkład noramlny
8. Współczynnik korelacji.
9. Interpretowanie praw wielkich liczb.
10. Zastosowanie centralnego twierdzenia granicznego do szacowania prawdopodobieństw
związanych z sumą zmiennych losowych niezależnych.
11. Statystyka opisowa, populacja ogólna, próba prosta, statystyki.
12. Konstrukcja estymatorów charakterystyk liczbowych podstawowych rozkładów i badanie
ich własności.
13. Estymacja przedziałowa.
14. Testowanie hipotez parametrycznych.
15. Testowanie hipotez nieparametrycznych.
Metody nauczania
Wykład prowadzony jest metodą tradycyjną. Treść teoretycna jest bogato ilustrowana
przykładami.
Ćwiczenia tablicowe prowadzone są metodą tradycyjną, studenci otrzymują z
wyprzedzeniem listy z zadaniami, które następnie rozwiązują korzystając w razie
konieczności z pomocy prowadzącego.
Warunki zaliczenia
Zaliczenie przedmiotu odbywa się na podstawie ćwiczeń. Studenci uzyskują zaliczenie na
podstawie ocen cząstkowych uzyskanych w trakcie semestru lub w przypadku nie uzyskania
dostatecznej liczby ocen cząstkowych na podstawie kolokwium zaliczeniowego.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: analizy matematycznej i algebry.
Literatura podstawowa
1. D. Bobrowski, Probabilistyka w zastosowaniach technicznych, PWN Warszawa 1991.
2. W. Krysicki, J. Bartos, W. Dyczka, Rachunek prawdopodobieństwa i staystyka
matematyczna w zadaniach Cz.I i Cz. II, Warszawa PWN 1996.
Literatura uzupełniająca
1. A. Plucińska, E. Pluciński, Elementy probabilistyki, PWN Warszawa 1991.
2. W. Feller, Wstęp do rachunku prawdopodobieństwa, PWN Warszawa 1961.
3. S. Firkowicz S, Statystyczne badanie wyrobów. W-wa, WNT 1970.
4. M. Fisz, Rachunek prawdopodobieństwa i statystyki matematycznej. W-wa, PWN 1967.
5. I. Kotlarski, Rachunek prawdopodobieństwa dla inżynierów. W-wa, WNT 1966.
PROBABILITY AND MATHEMATICAL STATISTICS
Objective
The objective of this course is to give a theoretical basis of probability theory and
mathematical statistics in a very general context and to demonstrate possible applications of
this theory. The cours shoul enable to formulate basic technical problems with uncertainty in
terms of probability and to solve problems in this framework.
Description
Axiomatic definition of probability space. Combinatorial methods. Independence of
events. Random variables and their numerical characteristics- expectation, variance, other
moments. Independent random variables and correlation coefficient. Types of convergence of
sequences of random variables. The central limit theorem and laws of large numbers.

30
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Estimators and their classifications. The concept of statistical hypothesis- parametric and
nonparametric hypotheses. Fundamental statistical hypotheses- tests for the mean, for the
variance and forthe correlation coefficient, the sign test, tolerance limits.
Keywords
Probability; combinatorial methods; mathematical statistics; estimation; hypothesis.

31
PROGRAMOWANIE OBIEKTOWE
Przedmiot obowiązkowy
Prowadzący Dr
inż. Aleksander Nawrat
(aleksander.nawrat@polsl.pl)
Rozkład Semestr
2
3
W
2
–
Ćw
–
–
Lab
–
2
Proj
–
–
Sem
–
–
Egz
–
–
ECTS
2
2
Cel
Celem przedmiotu jest zapoznanie słuchaczy z technikami, metodologią
i organizacją projektów systemów informacyjnych w oparciu o pojęcia
obiektowości. W ramach wykładów UML/OMT omówione zostaną
podstawowe cele i założenia UML/OMT, model obiektów wraz z odpowiednia
notacją graficzną, modele dynamiczne i model funkcjonalny.
Opis Omówione
będą podstawowe konstrukcje wchodzące w skład specyfikacji
języka C++. Przykłady będą mogły być uruchamiane zarówno w systemie
operacyjnym Windows jak i Linux. Początkowo omówione zostaną elementy
w/w języka jako nieobiektowe; później zagadnienia związane z obiektowością.
W trakcie wykładów omówione zostaną również podstawy języka C# i JAVY.
Nie jest jednak możliwe w piętnastu wykładach omówić trzech tak bogatych
języków jak C++, C# czy JAVA, uwaga zatem będzie skupiona na nauczeniu i
pokazani samej ideologii programowania obiektowego czyniąc jednak częste
dygresje na temat podstawowych podobieństw i różnic między tymi językami.
Wiadomości na temat C# i Javy jakie zostaną podane powinny znacznie
ułatwić późniejsze samodzielnie studiowanie tych języków.
Słowa
kluczowe
UML; C/C++; C#; JAVA; Analiza zorientowana obiektowo algorytmów;
automaty stanów.
Wykład
1. Paradygmat obiektowy w modelowaniu. Analiza i projektowanie obiektowe.
wprowadzeniu w UML i metodykę OMT (Object Modeling Technique). Przegląd języków
obiektowych.
2. Wstęp do graficznych środowisk programistycznych GUI dla C++, C# i JAVA
Microsoft.NET, Microsoft Visual Studio, Builder C++. Pierwszy program tych językach.
3. Zmienne i stałe. Instrukcje i wyrażenia. Funkcje.
4. Klasy.
5. Zaawansowane sterowanie programem.
6. Zarządzanie pamięcią. Zaawansowane wykorzystanie wskaźników.
7. Referencje. Zaawansowane referencje i wskaźniki.
8. Zaawansowane funkcje. Przeciążanie operatorów. Tablice. Dziedziczenie i polimorfizm.
9. Zaawansowany polimorfizm. Listy.
10. Specjalne klasy i funkcje. Preprocesor.
11. Obiektowo zorientowana analiza i projektowanie. Szablony. Wyjątki i obsługa błędów.
12. Programowanie wizualne w C++, JAVA i C#. Sposób konstruowania aplikacji
wizualnych w zależności od kompilatora.
13. Programowanie zdarzeniowe. Funkcje API Windows i ich zastosowania.
14. Komponenty VCL. Grafika – własności Canvas.
15. Aplikacje wielowątkowe i konstrukcje serwerów.

32
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Zajęcia laboratoryjne
1. Laboratoria składają się z ćwiczeń (10 ćwiczeń) i projektu (5 zajęć poświęconych na
napisanie własnej aplikacji).
2. Ćwiczenia wykonywane są indywidualnie.
3. Ćwiczenia odbywają się w salach laboratoryjnych i zaliczane są pod koniec zajęć.
4. Projekt przygotowywany jest indywidualnie lub zespołowo. Tematyka projektu jest ściśle
związana z tematyką wykładów. Projekty kilkuosobowe maja mieć na celu naukę pracy
zespołowej studentów, podział problemu na podzadania. Praktyczną naukę pracy
zespołowej, komunikacji pomiędzy zespołami oraz gruntowne testowanie aplikacji wraz z
dokumentacją.
5. Do zaliczenia zajęć potrzebne jest zaliczenie wszystkich ćwiczeń, oraz oddanie i zaliczenie
projektu w wyznaczonym przez prowadzącego terminie.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 12 komputerów PC z oprogramowaniem
specjalistycznym (w tym Microsoft Visual Studio, Microsoft.NET, Borland Builder 6.0,
NetBeans).
Metody nauczania
Wykład jest ilustrowany slajdami, wzbogacony o prezentację fragmentów programów
komputerowych.
Laboratorium odbywa się w sekcjach maksymalnie dwuosobowych. Studenci opracowywują
algorytm proponowanego rozwiązania problemowego i implementują go w zależności od
rodzaju rozwiązywanego zadania w jezyku programowania C++, C# lub JAVA.
Warunki zaliczenia
Warunkiem zaliczenia wykładu jest poprawne rozwiązanie testu końcowego.
Warunki zaliczenia laboratorium:
1. Programy oceniane są pod kątem:
•
poprawności projektu obiektów
•
poprawności konstrukcji algorytmów
•
poprawności działania
•
przejrzystości kodu
•
logicznych komentarzy i dokumentacji
•
użytych technologii
•
ogólnego wrażenia
2. Każde ćwiczenie może dostać od 0 do 5 punktów (10 zajęć laboratoryjnych)
3. Projekt oceniany jest w skali od 0 do 50 punktów. (5 zajęć poświęconych dopracowaniu
projektu).
4. Skala ocen:
91 -100 : 5.0
81 - 90 : 4.5
71 - 80 : 4.0
61 - 70 : 3.5
51 - 60 : 3.0
Wstępne przygotowanie
Zakłada się, że słuchacz tego wykładu zna podstawy programowania strukturalnego i
potrafi programować w języku C. Natomiast nie zakłada się żadnej znajomości języka C++,
C# oraz JAVY: ich elementy będą wprowadzane stopniowo od podstaw w kolejnych
wykładach.
Literatura podstawowa
1. K.Subieta, Obiektowość w projektowaniu i bazach danych

33
2. G.Booch, J.Rumbaugh, I.Jacobson, UML - przewodnik użytkownika
3. Bruce Eckel, „Thinking in C++”, Helion, 2000.
4. Bruce Eckel, „Thinking in Java”, Helion, 2000.
Literatura uzupełniająca
1. Jesse Liberty, „C++ -- Księga eksperta”, Helion, 2000.
2. Bertrand Meyer, Object-oriented software construction, Prentice Hall, 1988
3. B. Stroustrup, The C++ Programming Language, Addison-Wesley, Reading, Mass., 1991.
4. Jan Bielecki, Java po C++, Warszawa 1996.
5. Mike Morgan, Poznaj język Java 1.2, Warszawa 1999.
OBJECT ORIENTED PROGRAMMING
Objective
The main aim of the lecture and laboratory is introduction to different techniques and
methodology of organization of the informative systems based on the object oriented design.
In frames of lectures about the UML/OMT will be described based objectivity and
assumptions for UML/ OMT objects model together with suitable graphic notation.
Description
They will be introduced all the basic constructions of C++ programming language. All
examples used in the lecture can be run both in Windows or Linux based operating systems.
First will be described non-objective elements of computer programming languages, later on
will be introduced in contrary these elements which make possible to apply the objectivity.
During the lectures will be described also the basis of C # and JAVA computer language. It is
obvious that in fifteen lectures it is impossible to learn in details three most popular computer
languages such as C ++, C # or JAVA. The lecture and laboratory will be rather concentrated
on teaching and presenting to the listener the ideology of object-oriented programming point-
ing the similarity and differences between these languages. The information about C# and
JAVA will allow later on self studying of these languages.
Keywords
UML; C/C++: C#; JAVA; object oriented analysis.

34
Program studiów I-ego stopnia na kierunku automatyka i robotyka
DYNAMIKA UKŁADÓW
Przedmiot obowiązkowy
Prowadzący Prof. dr hab. inż. Jerzy Klamka
(jerzy.klamka@polsl.pl)
Rozkład Semestr
2
3
W
2
1
Ćw
1
1
Lab
–
1
Proj
–
–
Sem
–
–
Egz
–
E
ECTS
4
5
Cel
Celem przedmiotu jest przedstawienie metod tworzenia i analizy modeli
matematycznych układów dynamicznych na podstawie teorii równań
różniczkowych zwyczajnych i różnicowych.
Opis Przedstawia
się metody tworzenia modeli matematycznych ukladów
fizycznych i wynikające z nich równania różniczkowe zwyczajne oraz metody
ich rozwiazywania i właściwości rozwiązań. Omawia się transformację
Laplace’a i jej zastosowanie do rozwiązywania równań różniczkowych
liniowych w tym równań z wymuszeniem dystrybucyjnych. Przedstawia się
także liniowe, ciągłe, skończenie-wymiarowe, stacjonarne układy dynamiczne,
ich równania stanu i wyjścia, macierz transmitancji operatorowych,
transmitancję operatorowa i widmową i ich własności, sterowalność;
obserwowalność oraz kanoniczną postać Kalmana.
Słowa
kluczowe
Równania różniczkowe i różnicowe; układy dynamiczne; modele
matematyczne; transmitancja operatorowa; sterowalność; obserwowalność.
Wykład
Modele matematyczne układów dynamicznych i sposoby ich tworzenia; budowa modeli
matematycznych układów dynamicznych z zastosowaniem bilansów mas, objętości i energii.
Modelowanie fizyczne i matematyczne elementów układów elektrycznych i
mechanicznych o ruchu postępowym prostoliniowym i obrotowym. Geometria układów,
równania równowagi i techniki ich układania.
Równania Lagrange’a i ich zastosowanie do modelowania układów.
Analogie elektromechaniczne, termodynamiczne, przykłady.
Równania różniczkowe zwyczajne: istnienie i jednoznaczność rozwiązania, ciągła
zależność rozwiązania od warunków początkowych i parametrów równania, punkty
równowagi i stabilność rozwiązań równań nieliniowych.
Równania różniczkowe liniowe i metody ich rozwiązywania, równania jednorodne,
fundamentalny układ rozwiązań i jego zastosowanie do rozwiązywania równań liniowych o
stałych współczynnikach.
Układy równań różniczkowych, sposoby rozwiązywania równań nieliniowych, metoda
izoklin, równania o rozdzielonych zmiennych, równania w postaci normalnej.
Dystrybucje, transformata Laplace’a i ich zastosowania w równaniach różniczkowych
liniowych.
Równania różnicowe: równania liniowe i metody ich rozwiązywania, transformata Z i jej
zastosowanie do rozwiązywania równań liniowych o stałych współczynnikach.
Model matematyczny układu dynamicznego w przestrzeni stanu: różniczkowe równania
stanu i algebraiczne równania wyjścia, pojęcie stanu i jego interpretacja.

35
Linearyzacja równań stanu, rodzaje układów liniowych, układy skończenie-wymiarowe
oraz układy nieskończenie-wymiarowe, przykłady.
Rozwiązywanie równań stanu liniowego układu skończenie-wymiarowego o wielu
wejściach i wielu wyjściach: macierz tranzycji stanu i jej własności, całkowa postać
rozwiązania równania stanu i jej interpretacja, składowa wymuszona i składowa swobodna
odpowiedzi układów, przykłady.
Stacjonarne układy liniowe: model matematyczny, wykładnicza macierz tranzycji stanu jej
własności i sposoby jej wyznaczania, kanoniczna postać Jordana i jej zastosowania w teorii
układów dynamicznych, przykłady.
Macierz transmitacji operatorowych dla układów stacjonarnych: własności macierzy
transmitancji operatorowych, przykłady.
Transmitancja operatorowa: własności transmitancji operatorowej, równanie dynamiki,
odpowiedź skokowa, odpowiedź impulsowa, współczynnik wzmocnienia, interpretacja
fizyczna położenia zer i biegunów, przykłady podstawowych elementów dynamicznych.
Transmitancja widmowa: własności transmitancji widmowej, charakterystyka
częstotliwościowa, odpowiedzi na wymuszenia sinusoidalne, przykłady.
Liniowe układy dynamiczne z opóźnieniami i ich modele matematyczne: postać warunków
początkowych, przestrzeń stanów układów z opóźnieniami, równania stanu, transmitancje
operatorowe, przykłady.
Sterowalność i obserwowalność: podstawowe definicje i pojęcia, macierze sterowalności i
obserwowalności, kryteria badania sterowalności i obserwowalności, kanoniczna postać
Kalmana, przykłady.
Ćwiczenia tablicowe
1. Przykłady układów dynamicznych i ich analiza.
2. Równania Lagrange’a.
3. Analogie elektromechaniczne.
4. Rozwiązywanie liniowych równań różniczkowych.
5. Transformacja Laplace’a i rozwiązywanie równań różniczkowych za pomocą transformat
Laplace’a.
6. Nieliniowe równania różniczkowe.
7. Równania różnicowe i transformata Z.
8. Równania stanu i równania wyjścia.
9. Macierz transmitancji operatorowych
10. Transmitancje operatorowe i ich własności.
11. Równanie dynamiki.
12. Odpowiedzi skokowe i impulsowe.
13. Charakterystyki częstotliwościowe i odpowiedzi na wymuszenie sinusoidalne.
14. Sterowalność i obserwowalność układów liniowych.
15. Kanoniczna postać Kalmana.
Zajęcia laboratoryjne
Zajęcia laboratoryjne prowadzone są w blokach 3x45 min.
1. Budowa modeli matematycznych w Simulinku. Analiza wpływu położenia pierwiastków
równania charakterystycznego dla układów II oraz III rzędu na składową swobodną i
wymuszoną odpowiedzi układu.
2. Porównanie odpowiedzi skokowych modeli nieliniowych i zlinearyzowanych.
3. Charakterystyki częstotliwościowe i odpowiedzi na wymuszenie sinusoidalne.
4. Porównanie działania modeli pełnych i uproszczonych.
5. Termin na odrabianie zaległości.

36
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 30 komputerów PC z oprogramowaniem
specjalistycznym (w tym Matlab/ Simulink).
Metody nauczania
Wykład prowadzony jest metodą tradycyjną.
Ćwiczenia tablicowe prowadzone są metodą tradycyjną, prowadzący formułuje
i rozwiązuje zadania.
Laboratorium odbywa się w
sekcjach dwuosobowych. Studenci opracowywują
i implementują przyklady popdane przez prowadzącego zajęcia.
Warunki zaliczenia
Zaliczenie wykładu odbywa się na podstawie pisemnego eqzaminu zawierającego część
zadaniowa oraz cześć teoretyczną.
Zaliczenie ćwiczen tablicowych odbywa się na podstawie obecności, kartkówek oraz
kolokwium poprawkowego.
Zaliczenie laboratorium odbywa się na podstawie obecności, sprawdzianów przygotowania
do ćwiczeń oraz sprawozdań.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: algebry, analizy matematycznej i elektrotechniki.
Literatura podstawowa
1. Klamka J., Ogonowski Z., „Teoria systemów liniowych”, skrypt Politechniki Śląskiej
nr 2159, Gliwice. 1999.
2. Kaczorek T. „Teoria sterowania i systemów”. PWN. Warszawa. 1993.
Literatura uzupełniająca
1. Niederliński A. „Systemy i sterowanie. Wstęp do automatyki i cybernetyki technicznej.
PWN. Warszawa. 1983.
DYNAMICAL SYSTEMS
Objective
The main purpose is to present theory of mathematical models and analysis of linear finite-
dimensional stationary control systems based on the theory of ordinary differential equations
and difference equations.
Description
Ordinary differential equations are considered. Presented are also: dynamical systems;
linear continuous-time finite-dimensional dynamical systems; state and output equations;
matrix of transfer functions; transfer functions and its properties; controllability;
observability; Kalman canonical form.
Keywords
Differential equations; difference equations; dynamical systems; mathematical models;
tranfer function; controllability; observability.

37
ELEKTROTECHNIKA I ELEKTROMECHANIKA
Przedmiot obowiązkowy
Prowadzący Dr
Bożena Paluchiewicz, Dr inż. Zbigniew Bortliczek
(bozena.paluchiewicz@polsl.pl, zbigniew.bortliczek@polsl.pl)
Rozkład Semestr
2
3
W
2
2
Ćw
2
1
Lab
–
1
Proj
–
–
Sem
–
–
Egz
E
E
ECTS
7
5
Cel
Celem przedmiotu jest zapoznanie studentów z podstawowymi
wiadomościami z dziedziny teorii układów elektrycznych i teorii
elektromechanicznego przetwarzania energii w maszynach i mikromaszynach
elektrycznych w zakresie właściwym dla kierunku Automatyka i Robotyka.
Opis
Przedmiot obejmuje wybrane działy teorii układów elektrycznych
z wymuszeniem stałym i sinusoidalnym w stanie ustalonym i nieustalonym;
fizyczne podstawy elektromechanicznego przetwarzania energii; przykłady
realizacji zasad elektromechanicznego przetwarzania energii w maszynach
i mikromaszynach elektrycznych dla układów automatyki i robotyki.
Słowa
kluczowe
Układy (obwody) elektryczne; analiza układów (obwodów) elektrycznych;
maszyny (mikromaszyny) elektryczne; elektromechaniczne przetworniki
energii; elektromaszynowe elementy automatyki.
Wykład
Semestr 2: Elementy teorii układów elektrycznych
1. Elementy układów elektrycznych: opis matematyczny elementów konserwatywnych
i dyssypatywnych, źródła energii elektrycznej napięciowe i prądowe.
2. Układy elektryczne: ich struktura i opis matematyczny za pomocą prawa Ohma i praw
Kirchhoffa, metoda oczkowa i węzłowa.
3. Liniowość i nieliniowość elementów i układów elektrycznych, zasada superpozycji.
4. Układy elektryczne z wymuszeniem stałym: elementy układów przy wymuszeniu stałym w
stanie nieustalonym i ustalonym; opis matematyczny układów z wymuszeniem stałym w
stanie ustalonym; metody rozwiązywania zadania analizy takich układów: bezpośrednia,
oczkowa i węzłowa, twierdzenie Thevenina i Nortona.
5. Układy elektryczne z wymuszeniem sinusoidalnym: elementy układów przy wymuszeniu
sinusoidalnym w stanie nieustalonym i ustalonym; analiza układów z wymuszeniem
sinusoidalnym w stanie ustalonym: opis matematyczny takich układów w postaci
zespolonej, zespolona wersja wybranych metod rozwiązywania zadania analizy; zjawiska
rezonansowe; moc elektryczna w układach z wymuszeniem sinusoidalnym.
6. Stany nieustalone w układach elektrycznych z wymuszeniem stałym: opis matematyczny
takich układów w postaci operatorowej, operatorowa wersja wybranych metod
rozwiązywania zadania analizy.
Semestr 3, część I: Fizyczne podstawy elektromechaniki
1. Podstawowe prawa elektromagnetyzmu: prawo przepływu prądu, prawo ciągłości
strumienia magnetycznego; obwody magnetyczne: przegląd rozwiązań, magnetyki,
równanie materiałowe magnetyków, opis matematyczny obwodów magnetycznych,
analogi elektryczne obwodów magnetycznych.
2. Zjawisko indukcji elektromagnetycznej: ruch przewodu w stałym polu magnetycznym;
nieruchomy obwód prądowy w zmiennym polu magnetycznym; uogólnienie na
przykładzie elementarnej prądnicy elektrycznej; induktory; transformatory.

38
Program studiów I-ego stopnia na kierunku automatyka i robotyka
3. Energia i siły w polu magnetycznym: energia pola magnetycznego; siły w polu
magnetycznym: siła działająca na element ferromagnetyczny; siła działająca na przewód
z prądem; uogólnienie na przykładzie elementarnego silnika elektrycznego.
Semestr 3, część II: Elektromechaniczne przetworniki energii:
4. Maszyna elektryczna jako elektromechaniczny przetwornik energii: praca silnikowa
i prądnicowa, bilans energetyczny, sprawność; klasyfikacja maszyn elektrycznych.
5. Maszyny elektryczne bezkomutatorowe: charakterystyka ogólna.
6. Maszyny elektryczne asynchroniczne: zasady budowy; praca silnikowa maszyny
dwufazowej przy zasilaniu symetrycznym i asymetrycznym; praca prądnicowa; przykłady
zastosowania w układach automatyki i robotyki: dwufazowy asynchroniczny silnik
wykonawczy, dwufazowa asynchroniczna prądnica tachometryczna.
7. Maszyny elektryczne komutatorowe: osobliwości budowy i opis matematyczny.
8. Maszyny elektryczne komutatorowe prądu stałego: praca silnikowa i prądnicowa;
przykłady zastosowania w układach automatyki i robotyki: silniki wykonawcze i prądnice
tachometryczne prądu stałego.
Ćwiczenia tablicowe
Semestr 2:
1. Równania równowagi układów elektrycznych.
2. Układy elektryczne z wymuszeniem stałym w stanie nieustalonym - metoda klasyczna.
3-4. Proste układy elektryczne z wymuszeniem stałym.
5-6. Złożone układy elektryczne z wymuszeniem stałym - metoda oczkowa i węzłowa.
7. Złożone układy elektryczne z wymuszeniem stałym - twierdzenie Thevenina i Norto-
na.
8-9. Układy elektryczne z wymuszeniem sinusoidalnym - metoda symboliczna.
10. Układy elektryczne z wymuszeniem sinusoidalnym - pomiar i obliczanie mocy czynnej.
11-12. Układy elektryczne z wymuszeniem stałym w stanie nieustalonym - metoda operatoro-
wa.
Semestr 3:
1. Obwody magnetyczne prądu stałego.
2. Transformatory – parametry schematu zastępczego.
3. Elektromagnetyczne mechanizmy wykonawcze prądu stałego - obliczanie siły pochodzenia
elektrycznego.
4.
Ogólne zasady elektromechanicznego przetwarzania energii – obliczanie momentu
elektromagnetycznego.
5. Silniki wykonawcze prądu stałego - właściwości regulacyjne.
Zajęcia laboratoryjne
1. Prądnice tachometryczne.
2. Dwufazowy asynchroniczny silnik wykonawczy.
3. Silniki wykonawcze prądu stałego – sterowanie twornikowe i biegunowe.
4. Silniki wykonawcze prądu stałego – stanowisko badawcze.
5. Dynamika układów elektrycznych z elementami R, L, C.
6. Symulator silnika wykonawczego prądu stałego.
Wyposażenie laboratoryjne:
Laboratorium jest wyposażone w stanowiska urządzeniowe i komputerowe z
oprogramowaniem specjalistycznym (w tym Matlab/Simulink).
W laboratorium badane są (stanowiska urządzeniowe) : dwufazowy asynchroniczny silnik
wykonawczy typ SF-2, silnik wykonawczy prądu stałego typ SB-4, dwufazowa
asynchroniczna prądnica tachometryczna.

39
Na skomputeryzowanym stanowisku z najnowszymi czujnikami pomiaru prędkości i
momentu badany jest silnik prądu stałego typ PRMO 30.
Komputerowe stanowisko symulatora silnika wykonawczego prądu stałego jest aktualnie
uruchamiane.
Z wykorzystaniem oprogramowania Matlab/Simulink badana jest odpowiedź układów R,
L, C (także układów mechanicznych) na wymuszenie skokiem jednostkowym .
Metody nauczania
Wykład prowadzony jest w sposób tradycyjny. Do wykładów opracowywane są
prezentacje multimedialne.
Ćwiczenia tablicowe prowadzone są metodą tradycyjną, prowadzący formułuje i
rozwiązuje zadania.
Laboratorium odbywa się w sekcjach kilkuosobowych. Studenci wykonują pomiary na
stanowiskach urządzeniowych i symulując pracę wybranych przetworników na stanowiskach
komputerowych opracowują wyniki pomiarów i obliczają wybrane parametry przetworników.
Do oceny przedstawiają sprawozdanie w formie pisemnej.
Warunki zaliczenia i egzamin
Ćwiczenia – w każdym semestrze po 5 sprawdzianów pisemnych, kolokwium
poprawkowe.
Laboratorium – indywidualna ustna obrona pisemnego sprawozdania z każdego ćwiczenia.
Egzamin - ustny.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki przedmiotu student ma przygotowanie w
zakresie następujących przedmiotów: matematyka – podstawy analizy matematycznej, liczby
zespolone, rozwiązywanie układów równań liniowych, podstawy rachunku operatorowego
wg Laplace’a, fizyka – fizyczne podstawy elektrotechniki.
Na wykładach i ćwiczeniach niezbędne wiadomości z matematyki i fizyki a także podstaw
rachunku operatorowego ( np. opis odpowiedzi na skok jednostkowy w układach R, L, C oraz
dynamika silników) ukierunkowane na zastosowania w elektrotechnice i elektromechanice
wprowadzane są przez wykładowcę.
Literatura podstawowa
1. Wykłady – stanowią kompendium wiedzy wybranej z literatury pod kątem kierunku
automatyka i robotyka.
2. Wykłady multimedialne : przygotowany wykład z silników wykonawczych prądu stałego;
część wykładów z elektrotechniki (zawierają również przykładowe zadania i testy)
3. Osiowski J., Szabatin J.: Podstawy teorii obwodów. T.I - II, WNT, Warszawa 1998
(wyd.III).
4. Owczarek J. (red.): Elektryczne maszynowe elementy automatyki. WNT, Warszawa 1983.
5. Instrukcje laboratoryjne – materiały powielane.
Literatura uzupełniająca
1. Bolkowski S.: Teoria obwodów elektrycznych. WNT, Warszawa 1998 (wyd.V).
2. Meisel J.: Zasady elektromechanicznego przetwarzania energii. WNT, Warszawa 1970.
ELECTROTECHNICS AND ELECTROMECHANICS
Objectives
The goal of the subject is to instruct students in common knowledge about electrical
circuits theory and electromechanical energy conversion theory in area which is adequately
for Automatic and Robotic specialization.
40
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Description
The subject includes:
select fields of theory of electricalcircuits with constant and sinusoidal excitation in steady
and nonsteady states; physical principles of electromechanical energy conversion; examples
of applications of electrical machines and micromachines for automatic control and robotics.
Keywords
Electrical systems (circuits); analysis of electrica systems (circuits); electrical machines
(micromachines); electromechanical energy converters; electrical micromachines for
automatic control.

41
MECHANIKA
Przedmiot obowiązkowy
Prowadzący Dr hab. inż. Arkadiusz Mężyk
(arkadiusz.mezyk@polsl.pl)
Rozkład Semestr
3
W
2
Ćw
2
Lab
–
Proj
–
Sem
–
Egz
E
ECTS
5
Cel
Celem przedmiotu jest zaznajomienie studentów z podstawowymi prawami i
pojęciami mechaniki, wytrzymałości materiałów oraz mechaniki analitycznej,
które mogą być wykorzystane w zrozumieniu zagadnień specjalistycznych.
Zdobyta wiedzy pomoże również zrozumieć zasady projektowania i doboru
cech konstrukcyjnych elementów mechanizmów i maszyn.
Opis
Statyka; kinematyka i kinetyka bryły sztywnej; podstawy wytrzymałości
materiałów; układy statycznie niewyznaczalne; klasyfikacja mechanizmów i
par kinematycznych; kinematyka i kinetyka mechanizmów płaskich; podstawy
mechaniki analitycznej; opis ruchu ciał za pomocą macierzy przekształceń
jednorodnych, współrzędne Denavita-Hartenberga; zasada prac
przygotowanych; wyznaczanie częstości własnych układów mechanicznych;
elementy mechaniki płynów; statyka płynów; elementy kinematyki płynów;
równanie Bernoulliego; przepływy laminarne i turbulentne; przepływy przez
kanały zamknięte i otwarte; równanie Naviera-Stokesa; podobieństwa zjawisk
przepływowych; przepływy potencjalne i dynamika gazów; podstawy
mechaniki komputerowej; podstawy teorii drgań.
Słowa
kluczowe
Mechanika; statyka; kinematyka; kinetyka; wytrzymałość materiałów;
mechanika analityczna; mechanizmy; mechanika płynów.
Wykład
Tematyka poszczególnych wykładów obejmuje następujące zagadnienia:
1. Aksjomaty statyki, stopnie swobody i reakcje więzów, modele ciał rzeczywistych
stosowane w mechanice.
2. Redukcja przestrzennego dowolnego układu sił, wyznaczanie sił wewnętrznych w prętach
płaskich, elementy teorii stanu naprężenia i odkształcenia.
3. Prawo Hooke’a, układy liniowo-sprężyste, naprężenia i odkształcenia przy rozciąganiu,
zginaniu, skręcaniu i ścinaniu, układy statycznie niewyznaczalne.
4. Naprężenia dopuszczalne. Hipotezy wytężeniowe. Analiza wytężenia elementów maszyn.
Analiza wytrzymałościowa płyt i powłok cienkościennych. Wytrzymałość zmęczeniowa.
5. Kinematyka punktu, naturalny układ współrzędnych, kinematyka bryły, prędkości
i przyspieszenia w ruchu postępowym, obrotowym, płaskim,
6. Kinematyka bryły w ruchu złożonym, kulistym i ogólnym,
7. Geometria mas, masowe momenty bezwładności, momenty dewiacji, główne centralne
osie bezwładności, Tensor bezwładności.
8. Dynamiczne równania ruchu postępowego, obrotowego i płaskiego, reakcje dynamiczne,
praca, moc i energia w ruchu postępowym, obrotowym i płaskim,
9. Klasyfikacja więzów i par kinematycznych, klasyfikacja mechanizmów; kinematyka
i kinetyka mechanizmów płaskich;
10. Podstawy mechaniki analitycznej; opis ruchu ciał i układów mechanicznych za pomocą
macierzy przekształceń jednorodnych, współrzędne Denavita-Hartenberga; opis dynamiki
ciał doskonale sztywnych z pomocą macierzy przekształceń jednorodnych,

42
Program studiów I-ego stopnia na kierunku automatyka i robotyka
11. Współrzędne uogólnione i stopnie swobody układu, zasada prac przygotowanych, zasada
d’Alemberta, zasada Hamiltona, równania Lagrange’a I i II rodzaju, równania kanoniczne
Hamiltona
12. Wyznaczanie częstości własnych układów mechanicznych; Podstawy teorii drgań
13. Podstawy mechaniki komputerowej; metoda elemntów skończonych i brzegowych
14. Statyka płynów. Elementy kinematyki płynów. Równanie Bernoulliego. Przepływy
laminarne i turbulentne. Przepływy przez kanały zamknięte i otwarte.
15. Równanie Naviera-Stokesa. Podobieństwa zjawisk przepływowych. Przepływy
potencjalne i dynamika gazów.
Ćwiczenia tablicowe
1. Reakcje więzów w płaskim i przestrzennym dowolnym układzie sił.
2. Redukcja przestrzennego dowolnego układu sił,
3. Redukcja sił wewnętrznych w belkach zginanych.
4. Wyznaczanie naprężeń i odkształceń przy rozciąganiu, skręcaniu, zginaniu i ściskaniu.
5. Hipotezy wytężeniowe - hipoteza Hubera.
6. Układy statycznie niewyznaczalne.
7. Wyznaczanie prędkości i przyspieszeń w ruchu postępowym, obrotowym, płaskim.
8. Wyznaczanie prędkości i przyspieszeń w ruchu złożonym i kulistym.
9. Dynamiczne równania ruchu postępowego, obrotowego i płaskiego.
10. Analiza drgań układów; częstości własne.
11. Praca, moc i energia w ruchu postępowym, obrotowym i płaskim.
12. Zasada prac przygotowanych, zasada d’Alemberta.
13. Równania Lagrange’a I i II rodzaju.
14. Statyka płynów. Równanie Bernoulliego. Przepływy laminarne i turbulentne.
15. Zaliczenie przedmiotu.
Metody nauczania
Wykład jest ilustrowany prezentacjami multimedialnymi i filmami, wzbogacony o
prezentacje programów komputerowych.
Ćwiczenia tablicowe prowadzone są metodą tradycyjną, prowadzący formułuje zadania
i rozwiązuje wraz ze studentami.
Warunki zaliczenia
Zaliczenie ćwiczeń tablicowych - na podstawie pisemnych sprawdzianów przeprowadzanych
w trakcie zajęć lub sprawdzianów poprawkowych.
Zaliczenie wykładów - na podstawie pisemnych sprawdzianów przeprowadzanych w trakcie
zajęć lub sprawdzianów poprawkowych.
Egzamin – w formie pisemnej, po uprzednim zaliczeniu ćwiczeń tablicowych i wykładu.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: rachunku wektorowego, rachunku macierzowego, równań
rózniczkowych zwyczajnych.
Literatura podstawowa
1. Leyko J.: Mechanika ogólna. PWN, Warszawa 2002.
2. Bąk R., Burczyński T.: Wytrzymałość materiałów z elementami ujęcia komputerowego.
WNT Warszawa 2001
3. Morecki A., Knapczyk J., Kędzior K.: Teoria mechanizmów i manipulatorów, WNT
Warszawa 2002
4. Puzyrewski R., Sawicki J.: Podstawy mechaniki płynów i hydrauliki. PWN Warszawa
2000.

43
5. Niezgodziński M.E., Niezgodziński T.: Zbiór zadań z mechaniki ogólnej. PWN Warszawa
2003
Literatura uzupełniająca
1. Hibbeler R. C.: Engineering Mechanics. Prentice Hall, New York 1997.
2. Awrejcewicz J.: Mechanika. WNT Warszawa 2007.
3. Gryboś R.: Zbiór zadań z technicznej mechaniki płynów. PWN Warszawa 2002.
4. Gutowski R.: Mechanika analityczna. PWN Warszawa 1971.
MECHANICS
Objectives:
The aim of this course is introducing students to basic laws and concepts of mechanics
strength of materials, theory of machines and mechanisms, and variational methods of
mechanics, which can be useful for understanding of other technical problems. Another
important goal is also to help understand the rules of design and selection of design features
of mechanisms and machines.
Description:
Statics, kinematics and kinetics of rigid body, introduction to strength of materials,
statically indeterminate systems, classification of mechanisms and kinematic pairs, kinematics
and kinetics of planar mechanisms, introduction to variational methods of mechanics,
kinetics of rigid body, Denavit-Hartenberg coordinates, principle of virtual work, eigenvalues
and eigenvectors of mechanical systems, intorduction to fluid mechanics, fluid statics,
introduction to fluid kinematics, Bernoulli equation, laminar and turbulent flow, flows
through chanels, Navier-Stokes equation, dynamic similarity of flows; potential flow and
dynamics of gas, introduction to computational mechanics, introduction to mechanical
vibration.
Keywords:
Mechanics; statics; kinematics and kinetics; strength of materials; variational methods of
mechanics; mechanism; fluid mechanics.

44
Program studiów I-ego stopnia na kierunku automatyka i robotyka
METODY OBLICZENIOWE OPTYMALIZACJI
Przedmiot obowiązkowy
Prowadzący Dr hab. inż. Zdzisław Duda
(zdzislaw.duda@polsl.pl)
Rozkład Semestr
3
W
1
Ćw
–
Lab
1
Proj
–
Sem
–
Egz
–
ECTS
3
Cel
Celem przedmiotu jest omówienie wybranych numerycznych metod
optymalizacji statycznej. Znajomość tych metod ułatwi studentom
formułowanie i rozwiązywanie problemów optymalizacyjnych oraz
zrozumienie działania profesjonalnych algorytmów oferowanych przez
producentów oprogramowania.
Opis Sformułowanie problemów optymalizacji statycznej; przykłady zagadnień
optymalizacyjnych; warunki konieczne i wystarczające ekstremum funkcji
jednej i wielu zmiennych; numeryczne metody minimalizacji funkcji jednej
zmiennej; numeryczne metody (bezgradientowe i gradientowe) minimalizacji
funkcji wielu zmiennych bez ograniczeń; numeryczne metody optymalizacji z
ograniczeniami równościowymi i nierównościowymi; programowanie liniowe.
Słowa
kluczowe
Programowanie bez ograniczeń; metody bezgradientowe; metody
gradientowe; programowanie z ograniczeniami, programowanie liniowe.
Wykład
Sformułowanie problemów optymalizacji statycznej; przykłady zagadnień
optymalizacyjnych: analiza regresji, problem przydziału maszyn; programowanie nieliniowe;
numeryczne metody minimalizacji funkcji jednej zmiennej bez ograniczeń : Fibonacciego,
złotego podziału i aproksymacji kwadratowej; obliczanie gradientu formy liniowej i
kwadratowej, gradientu funkcji, hesjanu, badanie określoności macierzy kwadratowej
wykorzystującej warunki Sylwestra, warunki konieczne i wystarczające na ekstremum funkcji
wielu zmiennych bez ograniczeń, numeryczne metody (bezgradientowe i gradientowe)
minimalizacji funkcji wielu zmiennych bez ograniczeń: Gaussa-Seidela i najszybszego
spadku; algorytmy poszukiwań ekstremum funkcji według kierunków sprzężonych oparte na
metodach Powella i gradientu sprzężonego, zasady generowania „korzystnych” kierunków
poszukiwań; możliwości przyśpieszania zbieżności metod bezgradientowych; metody
newtonowskie i quasi-newtonowskie: Newtona-Raphsona, Davidona-Fletchera-Powella,
programowanie nieliniowe z ograniczeniami; metody z zastosowaniem funkcji kary: metoda
Carrola, Fiacco i McCormicka ; metody z zastosowaniem modyfikacji kierunków, metoda
Complex, porównanie prezentowanych metod; programowanie liniowe; metoda graficzna
rozwiązania; interpretacja geometryczna rozwiązania optymalnego, metoda Simplex; tablica
simpleksów.
Zajęcia laboratoryjne
1. Wprowadzenie do laboratorium – 1 h.
2. Minimalizacja na kierunku i proste metody bezgradientowe (algorytmy złotego podziału i
Gaussa-Seidla) – 2 h.
3. Metoda Powella – 2h.
4. Proste metody gradientowe poszukiwania minimum (algorytm najszybszego spadku) –2 h.
5. Metody poszukiwania minimum z ograniczeniami (metoda funkcji kary) – 2 h.
6. Metody newtonowskie – 2 h.

45
7. Zadanie programowania liniowego (Algorytm simpleksów) – 2 h.
8. Odrabianie i zaliczenie laboratorium – 2 h.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 12 komputerów PC z oprogramowaniem.
Metody nauczania
Wykład prowadzony jest tradycyjnie i ilustrowany slajdami.
Laboratorium odbywa się w sekcjach dwuosobowych. Studenci rozwiązują zadania
optymalizacyjne formułowane przez prowadzącego zajęcia korzystając z wiadomości
przekazanych na wykładzie i używając oprogramowania specjalistycznego.
Warunki zaliczenia
Zaliczenie wykładu polega na uzyskaniu pozytywnego wyniku na kolokwium
zaliczeniowym.
Zaliczenie laboratorium polega na zaliczeniu poszczególnych ćwiczeń laboratoryjnych.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie podstawowych pojęć z analizy matematycznej i algebry oraz
znajomość programowania np. w Matlabie
Literatura podstawowa
1. Findeisen W., Szymanowski J., Wierzbicki A.: Teoria i metody obliczeniowe
optymalizacji
2. Laboratorium metod optymalizacji statycznej, skrypt uczelniany nr. 1852 .
Literatura uzupełniająca
1. Sidler I., Badach A., Molisz W.: Metody rozwiązywania zadań optymalizacji.
COMPUTATIONAL OPTIMIZATION
Objective
The course is concerned with numerical methods of nonlinear and linear programming and
some theoretical considerations related to discussed techniques. Owing to this students can
formulate and solve optimizations problems and understand professional algorithms available
in software packages.
Description
Optimization problem statement; some optimization problems; necessary and sufficent
conditions for an extremum of a function of one and several variables; numerical
minimization for a function of one variable; numerical (non-gradient and gradient)
unconstrained minimization for a function of several variables; numerical constrained
minimization for a function of several variables; linear programming
Keywords
Numerical optimization; unconstrained programming; non-gradient methods; gradient
methods, constrained optimization; linear programming.
46
Program studiów I-ego stopnia na kierunku automatyka i robotyka
PODSTAWY ELEKTRONIKI
Przedmiot obowiązkowy
Prowadzący Dr
inż Adam Błaszkowski
(adam.blaszkowski@polsl.pl)
Rozkład Semestr
3
4
W
2
–
Ćw
1
–
Lab
–
2
Proj
–
–
Sem
–
–
Egz
–
E
ECTS
3
5
Cel
Celem przedmiotu jest nabycie umiejętności i uzyskanie kompetencji
obejmujących zasady działania, budowę i modele przyrządów
półprzewodnikowych i układów scalonych oraz analizę, projektowanie
i pomiarową weryfikację prostych analogowych i cyfrowych układów
elektronicznych, w tym przetworników A/C i C/A.
Opis
Podstawowe pojęcia elektroniki; kompatybilność elektromagnetyczna;
charakterystyki elementarnych obwodów RLC; diody półprzewodnikowe;
tranzystory bipolarne i polowe, charakterystyki statyczne, parametry
małosygnałowe, podstawowe układy pracy; tyrystory i inne elementy
przełącznikowe; elementy optoelektroniczne; technologie układów scalonych;
układy z przełączanymi pojemnościami; układy prostownicze i zasilające;
stabilizacja napięcia; podstawowe układy energoelektroniczne; układy
wzmacniające małej częstotliwości; wzmacniacze operacyjne i ich
zastosowania; sprzężenie zwrotne i stabilność wzmacniacza; wzmacniacze
mocy; generatory o przebiegach sinusoidalnych i niesinusoidalnych; generatory
kwarcowe i funkcyjne; układy modulacji i demodulacji amplitudy i kąta; klucze
analogowe, układy próbkująco-pamiętające, przetworniki analogowo-cyfrowe i
cyfrowo-analogowe; podstawowe układy cyfrowe w technice bipolarnej i unipo-
larnej; programowalne układy analogowe.
Słowa
kluczowe
Kompatybilność elektromagnetyczna; przyrządy półprzewodnikowe; układy
scalone; układy elektroniczne; energoelektronika; układy półprzewodnikowe;
wzmacniacze; prostowniki; generatory; przetworniki A/C i C/A;
programowalne układy analogowe.
Wykład
1. Podstawowe pojęcia elektroniki. Symbole graficzne i zasady oznaczeń literowych
wielkości elektrycznych. Kompatybilność elektromagnetyczna.
2. Bierne elementy i obwody RLC. Diody półprzewodnikowe, podstawowe charakterystyki i
parametry.
3. Tranzystory bipolarne, charakterystyki statyczne, parametry małosygnałowe, podstawowe
układy pracy.
4. Tranzystory polowe złączowe i z izolowaną bramką i ich zastosowania.
5. Tyrystory i inne elementy przełącznikowe, elementy optoelektroniczne, technologie
układów scalonych. Nowoczesne techniki analogowe: technika prądowa, układy z
przełączanymi pojemnościami i przełączanymi prądami.
6. Układy prostownicze i zasilające. Stabilizacja napięcia.
7. Podstawowe układy energoelektroniczne: klasyfikacja przekształtników
energoelektronicznych, przekształtniki prądu stałego na prąd stały i przemienny,
przemienniki częstotliwości.

47
8. Układy wzmacniające: małej częstotliwości, szerokopasmowe, wzmacniacze prądu
stałego, wzmacniacze operacyjne i ich zastosowanie.
9. Sprzężenie zwrotne i stabilność wzmacniacza.
10. Wzmacniacze mocy klasy A, B, C i D.
11. Generatory o przebiegach sinusoidalnych LC i RC. Generatory kwarcowe. Generatory o
przebiegach niesinusoidalnych.
12. Układy modulacji i demodulacji amplitudy i kąta.
13. Podstawy przetwarzania AC i CA: klucze, układy próbkująco-pamiętające, przetworniki
analogowo-cyfrowe i cyfrowo-analogowe.
14. Praca wielkosygnałowa i charakterystyki wzmacniaczy tranzytowych w technice
bipolarnej i unipolarnej.
15. Programowane układy analogowe.
Ćwiczenia tablicowe
1. Analiza podstawowych obwodów RLC w dziedzinie czasu i częstotliwości.
2. Wyznaczanie charakterystyk stałoprądowych i punktów pracy układów
półprzewodnikowych.
3. Małosygnałowe schematy zastępcze i parametry tranzystorów. Analiza układu WE i WS.
4. Kolokwium zaliczeniowe I
5. Analiza układów z idealnymi wzmacniaczami operacyjnymi.
6. Układy prostownicze sterowane i niesterowane, obliczanie parametrów.
7. Kolokwium zaliczeniowe II
Zajęcia laboratoryjne
1. Podstawowe przyrządy pomiarowe
2. Diody półprzewodnikowe
3. Tranzystor bipolarny w układzie wspólnego emitera
4. Tranzystory polowe JFET i CMOS
5. Elementy optoelektroniczne
6. Tyrystor
7. Układy prostownicze
8. Zastosowanie wzmacniaczy operacyjnych
9. Generatory
10. Charakterystyki wielkosygnałowe wzmacniaczy bipolarnych i MOS.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 10 testerów do badania przyrządów
półprzewodnikowych i układów scalonych oraz zestaw dedykowanych stanowisk do
pomiarów i badań układów elektronicznych. Każde stanowisko jest wyposażone w
indywidualny zasilacz sieciowy, generator sygnałowy, oscyloskop i komplet mierników
uniwersalnych, a w razie potrzeby w specjalistyczny sprzęt pomiarowy i zestaw mierzonych
elementów / układów.
Metody nauczania
Wykład jest ilustrowany slajdami i wzbogacony o prezentacje programów komputerowych
i symulacje omawianych elementów i układów.
Ćwiczenia tablicowe prowadzone są metodą tradycyjną, prowadzący formułuje
i rozwiązuje zadania; umiejętność ich rozwiązywania jest sprawdzana w trakcie kolokwiów
zaliczeniowych.
Laboratorium prowadzone jest w sekcjach dwu- lub trzyosobowych. Studenci korzystając
z instrukcji laboratoryjnych łączą układy pomiarowe, wykonują pomiary, a następnie
sporządzają sprawozadania oceniane przez prowadzącego.

48
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Przedmiot ma swoją stronę na Platformie Zdalnej Edukacji Instytutu Elektroniki
Politechniki Śląskiej (http://platforma.polsl.pl/rau3/course/enrol.php?id=71).
Warunki zaliczenia
Ćwiczenia tablicowe zaliczane na podstawie wyników dwu pisemnych sprawdzianów
przeprowadzanych w połowie i na końcu semestru.
Zaliczenie laboratorium wymaga wykonania kompletu ćwiczeń i oddania pisemnych
sprawozdań, a także zdania dwu pisemnych sprawdzianów po 1. i 2. serii ćwiczeń.
Przystąpienie do egzaminu wymaga posiadania zaliczeń z ćwiczeń tablicowych i
laboratorium. Egzamin składa sie z 3 części: zadań i testu z teorii w formie pisemnej oraz
części ustnej (pozytywne wyniki części zadaniowej i testu zwalniają z egzaminu ustnego).
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: analizy matematycznej, równań różniczkowych i elektrotechniki.
Zagadnienia poruszane w trakcie studiowania podstaw elektroniki powiązane są częściowo z
przedmiotem Dynamika układów.
Literatura podstawowa
1. Tietze U., Schenk Ch.: Układy półprzewodnikowe i układy scalone. WNT, W-wa 1996
2. Filipkowski A: Układy elektroniczne analogowe i cyfrowe. WNT, Warszawa 2006
3. Ciążyński W.: Elektronika w zadaniach. Tom I – III. Wyd. PKJS, Gliwice 1999 – 2001
4. Zioło K. (red.): Laboratorium elektroniki I. Wyd. Pol. Śl., Gliwice 2003
5. Zioło K. (red.): Laboratorium elektroniki II. Wyd. Pol. Śl., Gliwice 2003
Literatura uzupełniająca:
1. Chwaleba A., Moeschke B., Płoszajski G.: Elektronika. WSziP, Warszawa 2007
2. Marciniak W.: Przyrządy półprzewodnikowe i układy scalone. WNT, Warszawa 1993
3. Horowitz P., Hill W.: Sztuka elektroniki, cz. 1 i 2. WKŁ, Warszawa 1997
4. Krykowski K.: Energoelektronika. Wyd. Pol. Śl., Gliwice 1996
PRINCIPLES OF ELECTRONICS
Objective
Objective of the course is to provide a basic understanding of the operating principles and
models of semoconductor devices and integrated circuits and an introduction to the theory,
operation and design of electronic circuits, including A/D and D/A converters. Due to classes
and laboratory work students should be able to analyse the operating principles of basic
electronic circuits and also to verify obtained results by measurements.
Description
Basic terms of electronics; electromagnetic compatibility (EMC); characteristics of
elementary RLC circuits; semiconductor diodes; bipolar and field-effect transistors,
characteristics and small-signal parameters, equivalent circuits; thyristors and other switching
devices; optoelectronic devices; integrated circuits techniques; switched capacitor (SC)
circuits; rectifier systems and power supplies; voltage regulators; principles od power
electronics; LF amplifiers; operational amplifiers and their applications; feedback and
stability in amplifiers; power amplifiers; sine wave, square wave, ramp and crystal oscillators,
function generators; amplitude and angle modulation and demodulation circuits; analog
switches, sample-and-hold circuits; A/D and D/A converters, basic bipolar and unipolar
digital circuits; field programmable analog arrays.
Keywords
EMC; Semiconductor devices; integrated devices; electronic circuits; semiconductor
circuits; amplifiers; rectifiers; power electronics; oscillators; modulators; A/D and D/A
converters; field programmable analog arrays.
49
BAZY DANYCH
Przedmiot obowiązkowy
Prowadzący Prof. dr hab. inż. Stanisław Kozielski
(stanislaw.kozielski@polsl.pl)
Rozkład Semestr
3
4
W
2
–
Ćw
–
–
Lab
–
–
Proj
–
2
Sem
–
–
Egz
–
–
ECTS
2
2
Cel
Celem przedmiotu jest przedstawienie podstaw baz danych, języka SQL jako
standardu języków zapytań, problemów ochrony integralności baz danych,
bezpieczeństwa baz danych, zarządzania transakcjami, architektury systemów
baz danych oraz metod projektowania baz danych.
Opis
Baza danych a system zarządzania bazą danych; modele danych; formalna
definicja modelu relacyjnego; język SQL; ochrona integralności danych;
bezpieczeństwo baz danych; zarządzanie transakcjami; sterowanie
współbieżnym dostępem do bazy danych; prowadzenie dziennika bazy
danych; odtwarzanie spójnego stanu bazy po awariach; projektowanie
struktury logicznej relacyjnych baz danych; modelowanie związków encji
i
tworzenie schematu relacyjnej bazy danych; normalizacja schematu
relacyjnej bazy danych; architektura systemu z bazą danych; architektura
klient/serwer; wielowarstwowe internetowe systemy bazodanowe.
Słowa
kluczowe
Baza danych; system zarządzania bazą danych; model relacyjny; algebra
relacji; języki zapytań; język SQL; integralność i bezpieczeństwo bazy
danych; transakcja; redundancja danych; postacie normalne relacji;
modelowanie związków encji; diagram związków encji.
Wykład
Ogólna charakterystyka baz danych. Baza danych a system zarządzania bazą danych.
Zadania systemu zarządzania bazą danych. Modele danych – krótka charakterystyka
hierarchicznego, sieciowego i relacyjnego modelu danych. Formalna definicja modelu
relacyjnego. Algebra relacji. Język SQL. Definiowanie tablic. Wprowadzanie i aktualizacja
danych w tablicach. Formułowanie zadań wyszukiwania danych. Wyszukiwanie w wielu
tablicach. Pytania zagnieżdżone. Funkcje agregujące. Grupowanie danych. Pytania
skorelowane. Perspektywy. Ochrona integralności danych – więzy referencyjne. Bezpieczeń-
stwo baz danych – kontrola dostępu; tworzenie użytkowników, nadawanie uprawnień.
Zarządzanie transakcjami: definicja i własności transakcji. Sterowanie współbieżnym dostę-
pem do bazy danych – mechanizmy blokad. Szeregowalność harmonogramów transakcji.
Zakleszczenie transakcji. Prowadzenie dziennika bazy danych. Odtwarzanie spójnego stanu
bazy po awariach. Projektowanie struktury logicznej relacyjnych baz danych. Modelowanie
związków encji: encje, związki, atrybuty; rodzaje związków. Algorytm tworzenia schematów
relacji z diagramu związków encji. Redundancja danych. Funkcyjne zależności między
danymi. Postacie normalne relacji. Architektura systemu z bazą danych. Architektura
klient/serwer. Wielowarstwowe internetowe systemy bazodanowe.
Zajęcia laboratoryjne
1. Definiowanie struktury bazy danych w języku SQL w środowisku PostgreSQL.
2. Proste zapytania w języku SQL w środowisku MySQL.
3. Zapytania złożone i podzapytania w języku SQL w środowisku MS SQLServer.

50
Program studiów I-ego stopnia na kierunku automatyka i robotyka
4. Tworzenie procedur składowanych i wyzwalaczy w środowisku PostgreSQL.
5. Tworzenie tabel, kwerend, formularzy i raportów w systemie Access 2000.
6. Projekt struktury relacyjnej bazy danych.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 20 komputerów PC z systemami zarządzania bazami
danych i programami narzędziowymi: SQLServer 2000, PostgreSQL, MySQL, MS Access
2000, EasyCase.
Metody nauczania
Wykład klasyczny, uzupełniany slajdami.
Treść wykładu i slajdy dostępne w postaci elektronicznej.
Laboratorium odbywa się w sekcjach jedno lub dwuosobowych. Studenci opracowywują
i implementują programy realizujące zadania określone przez prowadzącego.
Warunki zaliczenia
Zaliczenie wykładu: na podstawie kolokwium na wykładzie.
Warunkiem zaliczenia laboratorium jest zaliczenie wszystkich przewidzianych w planie
ćwiczeń laboratoryjnych oraz zaliczenie końcowego kolokwium.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie programowania komputerów.
Literatura podstawowa
1. H. Garcia-Molina, J.D. Ullman, J. Widom, Systemy baz danych. Pełny wykład. WNT, W-
wa 2006
2. R. Elmasri, S. Navathe, Wprowadzenie do systemów baz danych, Addison-Wesley,
Helion 2005.
3. C.J. Date, Wprowadzenie do systemów baz danych, WNT, W-wa 2000.
4. R. Coburn, SQL dla każdego, Helion 2005
Literatura uzupełniająca
1. J.D. Ullman, J. Widom, Podstawowy wykład z systemów baz danych. WNT, W-wa 2000.
2. H. Garcia-Molina, J.D. Ullman, J. Widom, Implementacja systemów baz danych, WNT,
W-wa 2003
DATABASE SYSTEMS
Objective
The purpose of the lecture is presentation of principles of databases and database
languages, the most important data models, SQL as a standard of query language. Database
design theory is also presented.
Description
Database and database management system. The overview of hierarchical, network and
relational data models. Relational model principles. Relational algebra operations. Queries in
relational algebra. SQL: data definition; insert, update and delete statement; basic and
complex queries; nested queries; aggregate functions and groupping; views. Referential
integrity, primary keys, foreign keys. Database security and authorization. Transaction
processing concepts. Concurrency control and database recovery. Data modelling using
Entity-Relationship Model. Relational database design using Entity- Relationship Diagrams.
Database design theory. Redundant information. Functional dependencies. Relation normal
forms. Database systems architecture.

51
Keywords
Database ; DBMS – database management system ; relational model ; relational algebra ;
SQL; referential integrity; database security; transaction; concurrency control; database
recovery; Entity-Relationship Diagrams; functional dependencies; normal forms.

52
Program studiów I-ego stopnia na kierunku automatyka i robotyka
METODY NUMERYCZNE
Przedmiot obowiązkowy
Prowadzący Prof. dr hab. inż. Jerzy Klamka
(jerzy.klamka@polsl.pl)
Rozkład Semestr
4
W
2
Ćw
–
Lab
2
Proj
–
Sem
–
Egz
–
ECTS
3
Cel
Celem przedmiotu jest zapoznanie studentów z numerycznymi metodami
przybliżonego rozwiązywania wybranych podstawowych zagadnień z
dziedziny analizy matematycznej, algebry liniowej oraz równań
różniczkowych zwyczajnych. Metody obliczeniowe ilustrowane są
przykładami liczbowymi.
Opis
Teoria błędów; obliczanie wartości funkcji; interpolacja; różniczkowanie
numeryczne; całkowanie numeryczne; aproksymacja; układy równań
liniowych; wartości własne i wektory własne macierzy; przybliżone
rozwiązywanie równań nieliniowych; przybliżone rozwiązywanie równań
różniczkowych zwyczajnych.
Słowa
kluczowe
Analiza numeryczna; metody iteracyjne; przyblizone rozwiązywanie
zagadnień nieliniowych; operatory róznicowe; błędy obliczen numerycznych.
Wykład
Źródła błędów. Błąd względny oraz bezwzględny. Błędy działań arytmetycznych i ich
oszacowania.
Obliczanie wartości funkcji analitycznej. Schemat Hörnera obliczania wartości
wielomianu.
Sformułowanie zagadnienia interpolacji. Wzór interpolacyjny Lagrange'a. Wzór
interpolacyjny Newtona. Operatory różnicowe. Schematy obliczeń dla operatorów
różnicowych. Rozwinięcia operatorów w szereg potęgowy Taylora. Wzory interpolacyjne
Newtona z zastosowaniem operatorów różnicowych. Porównanie wzorów interpolacyjnych.
Sformułowanie zagadnienia różniczkowania numerycznego. Wzory różniczkowania
numerycznego z zastosowaniem operatorów różnicowych.
Sformułowanie zagadnienia całkowania numerycznego. Wzór Newtona-Cotesa całkowania
numerycznego. Wzór trapezów. Wzór parabol. Metoda Gaussa całkowania numerycznego.
Metoda Czebyszewa całkowania numerycznego. Porównanie metod całkowania
numerycznego.
Sformułowanie zagadnienia aproksymacji. Różne rodzaje aproksymacji. Przestrzeń funkcji
całkowalnych z kwadratem. Układy funkcji liniowo niezależne, ortogonalne i ortonormalne.
Szeregi Fouriera. Aproksymacja średniokwadratowa. Aproksymacja w przestrzeni funkcji
ciągłych. Twierdzenie Weierstrassa. Wielomiany Czebyszewa i ich zastosowanie do
aproksymacji funkcji ciągłych. Aproksymacja punktowa - metoda najmniejszych kwadratów.
Metoda eliminacji Gaussa. Iteracyjne metody przybliżonego rozwiązywania układów
równań liniowych.
Podstawowe definicje i pojęcia. Iteracyjna metoda wyznaczania wartości własnych i
wektorów własnych.
Metoda połowienia przedziału. Metoda Newtona i jej modyfikacje. Metoda Bernoulliego.
Metoda szeregów Taylora. Metoda Piccarda kolejnych przybliżeń. Metoda Rungego-Kutty
i jej modyfikacje.

53
Zajęcia laboratoryjne
W ramach ćwiczeń laboratoryjnych główny nacisk jest położony na efektywne połączenie
teorii matematycznej poruszanej na wykładzie z praktyką obliczeniową. Zakres tematyczny
zajęć laboratoryjnych koresponduje z zagadnieniami omawianymi na wykładzie.
Zasadniczym celem zajęć jest wyrobienia u studentów umiejętności samodzielnego
i świadomego wyboru metody numerycznej do rozwiązania zadanego zagadnienia. W czasie
zajęć studenci dokonują analizy metod numerycznyczh pod kątem ich własności
numerycznych, ograniczeń stosowalności, stabilności, efektywności i szybkości zbieżności.
Umożliwia to nabycie wiedzy dotyczącej mocnych i słabych stron rozpatrywanych metod
oraz pozwala na poprawną interpretację uzyskiwanych wyników.
Na zajęciach studenci implementują algorytmy w oparciu o klasyczne języki
programowania (C/C++) z zastosowaniem dostępnych na zasadzie licencji wolnego
oprogramowania bibliotek numerycznych (np. GSL - ang. GNU Scientific Library). Ponadto
studenci wykorzystują komercyjne i udostępniane w ramach projektu oprogramowania
otwartego pakiety (Matlab, GNU Octave, Scilab, Rlab) dedykowane do obliczeń
numerycznych wyposażone w zaawansowane narzędzia do analizy, manipulacji i wizualizacji
danych oraz rozbudowane biblioteki numeryczne. W ramach zajęć studenci tworzą
uruchamiane w trybie wsadowym skrypty z wbudowanym i właściwym dla danego pakietu
języku programowania wysokiego poziomu.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 24 komputery PC z kompiltorami języków C/C++ oraz
Pascal, a także z oprogramowaniem specjalistycznym, w tym Matlab.
Metody nauczania
Wykłady prowadzone są w sposób tradycyjny bez uzycia komputera.
W ramach ćwiczeń laboratoryjnych studenci najpierw rozwiązuja analitycznie podane
zadanie obliczeniowe, a następnie znajdują rozwiązania przybliżone w oparciu o wybrane
metody numeryczne. W trakcie ćwiczenia dokonuje się analizy dokładności otrzymanych
wyników w zależności od wybranej metody obliczeniowej, parametrów występujących w
zadaniu oraz liczby wykonanych iteracji.
Ćwiczenia laboratoryjne wykonuje się w sekcjach 3 osobowych wykorzystując komputery
wyposażone w oprogramowanie napisane w języku PASCAL.
Warunki zaliczenia
Zaliczenie ćwiczeń laboratoryjnych odbywa się na podstawie ustnych kolokwiów oraz
pisemnych sprawozdań z poszczególnych ćwiczeń.
Zaliczenie wykładu jest na podstawie obecności na wykładach.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: algebry, matematyki.
Literatura podstawowa
1. Praca zbiorowa. “Laboratorium Metod Numerycznych”, skrypt Politechniki Śląskiej,
wydanie 1, nr 1305, Gliwice 1987; wydanie 2, nr 1538, Gliwice 1989; wydanie 3, nr 1790,
Gliwice, 1993.
2. Praca zbiorowa. “Metody Numeryczne”, skrypt Politechniki Śląskiej nr 2068. Gliwice.
1998.
3. Klamka Jerzy, Pawełczyk Marek, and Wyrwał Janusz, „Numerical Methods”,
Wydawnictwa Politechniki Śląskiej, Gliwice, 2001.
Literatura uzupełniająca
1. Demidowicz B.P., Maron I.A., "Metody numeryczne", tom I, PWN, Warszawa 1965.

54
Program studiów I-ego stopnia na kierunku automatyka i robotyka
2. Demidowicz B.P., Maron I.A., Szuwałowa E.J., "Metody numeryczne", tom II, PWN,
Warszawa 1965.
3. Ralston A., "Wstęp do analizy numerycznej", PWN, Warszawa 1965.
4. Ralston A., “A first course in numerical analysis”, Mc Graw-Hill, New York, 1965.
NUMERICAL METHODS
Objective
To provide an overview of different numerical methods used in mathematical analysis,
linear algebra and nonlinear ordinary differential equations. These theoretical methods are
illustrated by several examples. At the end of the module the student will be able to use
practically different numerical methods in computing.
Description
Theory of errors; computation of values of the functions; interpolation; numerical
differentiation; numerical integration; approximation; solution of systems of linear equations;
eigenvalues and eigenfunctions; approximate solution of nonlinear equations; approximate
solution of ordinary differential equations.
Keywords
Numerical analysis; iterative methods; approximate solution of nonlinear problems;
difference operators; errors of numerical computations.

55
SYSTEMY AUTOMATYCZNEGO WNIOSKOWANIA
Przedmiot obowiązkowy
Prowadzący Prof. zw. dr hab. inż. Antoni Niederliński
(antoni.niederlinski@polsl.pl)
Rozkład Semestr
4
W
2
Ćw
–
Lab
1
Proj
–
Sem
–
Egz
–
ECTS
3
Cel
Celem przedmiotu jest przedstawienie podstaw programowania w logice oraz
zastosowań programowania w logice do modelowania i rozwiązywania
wybranych problemów kombinatorycznych, spotykanych w zagadnieniach
sterowania procesami dyskretnymi i podejmowania dyskretnych decyzji.
Wykład będzie oparty o język Prolog, stanowiący obecnie podstawowe
narzędzie dla programowania w logice i automatyzacji wnioskowania.
Opis
Prolog jest językiem deklaratywnym. Nie służy do zapisu algorytmu
rozwiązywania zadania, lecz służy do opisu zadania, oraz zadeklarowania
celu, który interpreter lub kompilator Prologu stara się uczynić zdaniem
prawdziwym na drodze ukonkretnienia zmiennych logicznych występujących
w opisie zadania, co nastepuje w wyniku przeszukiwania bazy danych
zawierającej fakty i reguły. Deklaratywność Prologu bardzo ułatwia
formułowanie i rozwiązywanie zadań o charakterze kombinatorycznym,
spotykach zarówno w badaniach operacyjnych jak i w sterowaniu procesami
dyskretnymi.
Słowa
kluczowe
Reguły; fakty; unifikacja; nawroty; rekurencja; listy; relacyjne bazy danych;
drzewa decyzyjne.
Wykład
1. Prolog jako deklaratywny język programowania. Prolog i logika predykatów.
2. Fakty, reguły i cel.
Struktura programów w języku Prolog. Prolog a relacyjne bazy danych
3. Mechanizmy wnioskowania logicznego: unifikacja i nawroty
4. Elementarne programy wnioskujące i ich bazodanowa interpretacja
5. Unifikacja i nawroty w programach zawierających złożone reguły.
6. Sterowanie nawrotami za pomocą predykatów fail i cut. Zastsowanie predykatu cut dla
ograniczenia liczby rozwiązań i skrócenia czasu poszukiwań
7. Rekurencja: budowa reguł rekurencyjnych. Rekurencja ogonowa i nieogonowa
Przykładowe reguły rekurencyjne
8. Listy: budowa i znaczenie, typowe predykaty listowe
9. Przegląd typowych predykatów definiowanych rekurencyjnie z zastosowaniem list
10. Tworzenie list za pomocą predykatu findall
11. Dynamiczne (wewnętrzne) bazy danych. Predykaty assert i retract.
12. Poszukiwanie rozwiązań przez Prolog jako poszukiwanie w drzewach decyzyjnych.
13. Wyznaczanie dopuszczalnych rozwiązań problemów kombinatorycznych metodą
przeglądu zupełnego.
14. Wyznaczanie dopuszczalnych rozwiązań problemów kombinatorycznych metodą
nawrotu. Wyznaczenie trajektorii w przestrzeni dyskretnych stanów.
15. Wyznaczanie optymalnych rozwiązań problemów kombinatorycznych. Algorytm Branch
and Bound w Prologu.

56
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Zajęcia laboratoryjne
Zajęcia laboratoryjne są prowadzone równolegle do wykładu i obejmują problematyke
wykładową, wymienioną powyżej. Ukoronowaniem zajęć laboratoryjnych jest indywidualne
zadanie o większym stopniu trudności. Przedstawienie, uruchomienie i wyjaśnienie
rozwiązania tego zadania jest ważnym elementem zaliczenia przedmiotu. Ćwiczenia
laboratoryjne obejmują:
1. Relacyjne bazy danych w Prologu i ich przeszukiwanie. Unifikacja i nawroty
2. Unifikacja i nawroty w programach zawierających złożone reguły.
3. Sterowanie nawrotami za pomocą predykatów fail i cut.
4. Zastosowanie predykatu cut dla ograniczenia liczby rozwiązań i skrócenia czasu
poszukiwań
5. Tworzenie i testowanie wybranych reguł rekurencyjnych.Rekurencja: budowa reguł
rekurencyjnych.
6. Tworzenie list za pomocą predykatu findall.
7. Reguły rekurencyjne korzystające z list.
8. Dynamiczne (wewnętrzne) bazy danych i ich zastosowanie do tworzenia zmiennych
globalnych.
9. Wyznaczanie dopuszczalnych rozwiązań problemów kombinatorycznych metodą
przeglądu zupełnego.
10. Wyznaczanie dopuszczalnych rozwiązań problemów kombinatorycznych metodą
nawrotu.
11. Wyznaczania optymalnych rozwiązań problemów kombinatorycznych. Algorytm Branch
and Bound w Prologu.
12. Wyznaczanie trajektorii w przestrzeni dyskretnych stanów.
13. Rozwiązywanie indywidualnych zadań.
14. Rozwiązywanie indywidualnych zadań.
15. Obrona indywidualnych zadań.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 12 komputerów PC z dostępem do serwera zakładowego
z oprogramowaniem specjalistycznym (kompilator Prologu, zestaw przykładów, zestaw zadań
dorozwiązania).
Metody nauczania
Wykład jest w całości prowadzony z wykorzystaniem rzutnika multimedialnego. Studentom
udostepnia się na serwerze zakładowym komplet wyświetlanych materiałów. ilustrowany
slajdami, wzbogacony o prezentacje programów komputerowych. Stosowana metodyka
polega na przedstawieniu ciągu programów prologowych, o sukcesywnie wzrastającej
trudności, które ilustrują różne aspekty tego języka. Programy te, zamieszczone na stronie
internetowej Zakłady Komputerowych Systemów Sterowania, są obficie komentowane,
zaopatrzone w wyjaśnienia i stanowią również podstawę ćwiczeń laboratoryjnych.
Laboratorium odbywa się w
sekcjach dwuosobowych. Studenci opracowywują
i implementują.indywidualne zadania przedstawione przez prowadzącego......
Warunki zaliczenia
Zaliczenie wykładu na podstawie indywidualnego egzaminu, którego częścią jest dyskusja
indywidualnego projektu studenta. Zaliczenie laboratorium na podstawie indywidualnego
zaliczania poszczególnych ćwiczeń..
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie elementarnej logiki na poziomie szkoły średniej oraz znajomość
57
języka angielskiego w stopniu umozliwiajacym czytanie i rozumienie dokumentacji
programowej.
Literatura podstawowa
1. W.F.Clocksin, C.S.Mellish", "Prolog", Hellion, Gliwice, 2003.
2. R.Kowalski", "Logika w rozwiązywaniu zadań","WNT", "Warszawa", 1989
3. E.Gatnar, K.Stąpor","Prolog", "Wydawnictwo PLJ", "Warszawa",1992
4. A.Niederliński, Plik ok.60 programów dydaktycznych do nauki Prologu, dostępnych na
serwerze Zakładu Komputerowych Systemów Sterowania
Literatura uzupełniająca
1. R. Barták, “Guide to Prolog Programming, http://ktiml.mff.cuni.cz/~bartak/prolog/
2. Dokumentacja Visual Prolog – Personal Edition, http://www.visual-prolog.com/vip/
AUTOMATED REASONING
Objective
The course aims at presenting an introduction to logic programming and its application for
modeling and solving combinatorial control and decision problem. It is based on the logic
programming language Prolog, which is the most widely available language in the logic
programming paradigm.
Description
Prolog is a declarative language. It means that it does not serve to formulate algorithms,
i.e. to describe how to find a solution for a given problem, but to describe the relationships
which hold for the this problem by means of a database of facts and rules and a goal which is
a clause to be tested for truth. The Prolog compiler or interpreter – given the goal - searches
searches through the data base of facts and rules to determine (by logical deduction) whether
the goal can be made true and for what values of variables contained in the rules. This pave
the way towards declarative solving of combinatorial problems.
Keywords
Rules; facts; unification; backtracking; recursion; lists; relational data bases; decision tress.
58
Program studiów I-ego stopnia na kierunku automatyka i robotyka
TECHNIKA CYFROWA
Przedmiot obowiązkowy
Prowadzący Dr hab. inż. Marek Pawełczyk
(marek.pawelczyk@polsl.pl)
Rozkład Semestr
4
W
2
Ćw
1
Lab
1
Proj
–
Sem
–
Egz
E
ECTS
6
Cel
Celem przedmiotu jest nauczenie podstawowych pojęć oraz metod syntezy
i analizy układów logicznych kombinacyjnych i sekwencyjnych. Po
zakończeniu kursu z tego przedmiotu studenci powinni być również
przygotowani do kształcenia w zakresie systemów mikroprocesorowych oraz
sterowników programowalnych.
Opis
Kodowanie dwójkowe; podstawowe operacje arytmetyczne; algebra Boole’a;
siatki Karnaugha; podstawowe bramki logiczne; minimalizacja funkcji
logicznych; synteza układów kombinacyjnych z zastosowaniem bramek;
układy iteracyjne; wykrywanie i usuwanie hazardu; układy sekwencyjne
asynchroniczne i synchroniczne; budowa i minimalizacja tablic przejść-wyjść;
unikanie wyścigów i hazardów; przerzutniki asynchroniczne i synchroniczne;
budowa funkcji wzbudzeń przerzutników; synteza rejestrów i liczników;
układy mikroprogramowalne; układy z zależnościami czasowymi.
Słowa
kluczowe
Arytmetyka układów cyfrowych; algebra Boole’a; siatka Karnaugha; elementy
logiczne; układy kombinacyjne; układy sekwencyjne; układy asynchroniczne
i synchroniczne; hazard; wyścig; pamięci; układy mikroprogramowane.
Wykład
1. Wprowadzenie – program przedmiotu, zasady zaliczania, literatura, podstawowe pojęcia.
2. Systemy liczbowe, podstawowe operacje arytmetyczne – dodawanie odejmowanie,
mnożenie, dzielenie.
3. Prawa algebry Boole’a, reprezentacja funkcji boolowskich, postać alternatywna i postać
koniunkcyjna, bramki logiczne.
4. Minimalizacja funkcji logicznych, kod Gray’a, siatki Karnaugha.
5. Realizacja funkcji logicznych z zastosowaniem bramek NAND i NOR.
6. Układy iteracyjne, sumatory jedno- i wielopozycyjne, minimalizacja funkcji logicznych
metodą McCluskey’a i Quine’a.
7. Dekodery i kodery, multipleksery i demultipleksery, sumatory, komparatory.
8. Wstęp do układów sekwencyjnych, przerzutniki D, T, RS, JK.
9. Automaty asynchroniczne – wyznaczanie tablic przejść i wyjść, minimalizacja tablicy
przejść, kodowanie stanów, realizacja automatu, wyścig krytyczny i niekrytyczny, hazard,
struktura typu układ kombinacyjny ze sprzężeniem zwrotnym, struktura wykorzystująca
bramki logiczne oraz przerzutniki elementarne – cześć 1.
10. Automaty asynchroniczne – cześć 2.
11. Automaty synchroniczne – graf automatu, wyznaczenie tablicy przejść i wyjść,
minimalizacja liczby stanów automatu, kodowanie tablicy, wybór przerzutników,
określenie funkcji wzbudzeń przerzutników, znalezienie funkcji wyjść, przykłady
automatów synchronicznych – cześć 1.
12. Automaty synchroniczne – cześć 2.

59
13. Automaty standardowe – liczniki równoległe, liczniki szeregowe, rejestry liczące, rejestry
liniowe.
14. Układy mikroprogramowalne – realizacja układów programowalnych.
15. Metody projektowania i syntezy układów cyfrowych w oparciu o struktury CPLD
i FPGA.
Ćwiczenia tablicowe
1. Arytmetyka cyfrowa oraz minimalizacja funkcji logicznych.
2. Projektowanie układów kombinacyjnych.
3. Projektowanie automatów sekwencyjnych asynchronicznych.
4. Projektowanie automatów sekwencyjnych synchronicznych.
5. Analiza układów sekwencyjnych.
6. Projektowanie układów mikroprogramowanych.
Zajęcia laboratoryjne
1. Układy kombinacyjne.
2. Przerzutniki.
3. Asynchroniczne automaty sekwencyjne.
4. Synchroniczne automaty sekwencyjne.
5. Rejestry i liczniki.
6. Języki opisu sprzętu (HDL).
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 24 komputery PC, 24 zestawy uruchomieniowe bazujące
na matrycach mikroprogramowalnych FPGA, symulatory obiektów przemysłowych,
8 oscyloskopów oraz analizator stanów logicznych służących do uruchamiania i testowania
układów.
Metody nauczania
Wykład jest ilustrowany slajdami, wzbogacony o prezentacje programów komputerowych
oraz dodatkowe komentarze i wyjaśnienia z użyciem tablicy.
Ćwiczenia tablicowe prowadzone są metodą tradycyjną, prowadzący formułuje
i rozwiązuje zadania przy tablicy, studenci otrzymują zadania do samodzielnego rozwiązania.
Laboratorium odbywa się w sekcjach dwuosobowych. Do dyspozycji studentów jest
komplet instrukcji do ćwiczeń laboratoryjnych. Po wprowadzeniu do danego ćwiczenia
laboratoryjnego studenci projektują zadany układ, a następnie implementują go oraz
sprawdzają poprawność działania.
Warunki zaliczenia
Zaliczenie wykładu odbywa się na podstawie obecności.
Zaliczenie ćwiczeń tablicowych odbywa się na podstawie trzech zapowiedzianych
kartkówek.
Każde z sześciu zajęć laboratoryjnych punktowane jest w skali od 0 do 5. Na uzyskaną
liczbę punktów wpływają teoretyczne przygotowanie do zajęć, poprawność rozwiązania
postawionego zadania, zaliczenie sprawozdania. Do uzyskania zaliczenia zajęć
laboratoryjnych niezbędne jest uzyskanie co najmniej 3 punktów z co najmniej pięciu
punktowanych zajęć oraz uzyskanie łącznej liczby punktów nie mniejszej, niż 18. Skala ocen
jest następująca:
0 – 17 pkt. – brak zaliczenia
18 – 20 pkt. – ocena 3.0
21 – 23 pkt. – ocena 3.5
24 – 26 pkt. – ocena 4.0
27 – 28 pkt. – ocena 4.5
29 – 30 pkt. – ocena 5.0

60
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Zaliczenie całości przedmiotu następuje po uzyskaniu zaliczenia z wykładu, ćwiczeń
tablicowych, zajęć laboratoryjnych oraz pozytywnym zdaniu egzaminu pisemnego, w skład
którego wchodzą pytania teoretyczne oraz zadania. Istnieje możliwość zwolnienia z egzaminu
w przypadku obecności na wykładzie oraz uzyskania średniej z ocen końcowych z ćwiczeń
tablicowych oraz zajęć laboratoryjnych nie mniejszej, niż 4.5.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: algebry, podstaw elektroniki.
Literatura podstawowa
1. A. Niederliński: „Mikroprocesory, mikrokomputery, mikrosystemy”, Wydawnictwa
Szkolne i Pedagogiczne, Warszawa, 1988.
2. A. Skorupski: „Podstawy techniki cyfrowej”, WkiŁ, W-wa, 2004.
3. H. Kamionka-Mikuła, H. Małysiak, B. Pochopień: „Układy cyfrowe. Teoria i przykłady”,
Wydawnictwo Pracowni Komputerowej Jacka Skalmierskiego, Gliwice, 2004
4. H. Małysiak, B. Pochopień, Ed.: „Układy cyfrowe. Zadania”, Wydawnictwo Politechniki
Śląskiej, Gliwice, 2002.
5. Instrukcje powielane, Internet.
Literatura uzupełniająca
1. W. Traczyk: „Układy cyfrowe. Podstawy teoretyczne i metody syntezy”, WNT, W-wa,
1982.
2. W. Majewski: „Układy logiczne”, WNT, W-wa, 1992.
3. B. Pochopień: „Arytmetyka systemów cyfrowych”, Wydawnictwo Politechniki Śląskiej,
Gliwice, 2003.
4. A. Hławiczka, Ed.: „Laboratorium podstaw techniki cyfrowej”, Wydawnictwo Politechniki
Śląskiej, Gliwice, 2002.
5. H. Małysiak, Ed.: „Teoria automatów cyfrowych. Laboratorium”, Wydawnictwo
Politechniki Śląskiej, Gliwice, 2003.
DIGITAL TECHNIQUE
Objective
The aim of the course is to teach basic terms and methods for synthesis and analysis of
combinational and sequential logic circuits. After completing the course students should be
ready to continue education on microprocessor systems and programmable controllers.
Description
Binary numbers; arithmetic operations; Boolean algebra; Karnaugh maps; basic logic
gates; minimization of logic functions; synthesis of combinational circuits using logic gates;
iterative circuits; hazards detection and elimination; synchronous and asynchronous sequential
circuits; design, minimization and coding the present-state/next-state tables; avoiding races
and hazards; asynchronous and synchronous flip-flops; design of excitation functions for flip-
flops; synthesis of registers and counters; microprogrammable circuits; circuits with delay
units.
Keywords
Arithmetic of logic circuits; Boolean algebra; Karnaugh map; logic gates; combinational
circuits; sequential circuits; asynchronous circuits; synchronous circuits; hazard; race; mem-
ory; microprogrammable circuits.

61
PODSTAWY MIERNICTWA
Przedmiot obowiązkowy
Prowadzący Dr
inż. Dariusz Buchczik
(dariusz.buchczik@polsl.pl)
Rozkład Semestr
4
W
2
Ćw
1
Lab
1
Proj
–
Sem
–
Egz
E
ECTS
5
Cel
Celem przedmiotu jest poznanie podstawowych pojęć miernictwa, obiektów i
metod pomiaru, wzorców, przyrządów i przetworników pomiarowych oraz
czynności metrologicznych. Celem jest poznanie budowy i zasad użytkowania
najważniejszej aparatury. Słuchacze winni nabyć umiejętność wykonywania
pomiarów laboratoryjnych, interpretacji wyników wraz z oszacowaniem ich
niepewności.
Opis
Prawne aspekty miar; istota pomiaru; jednostki miar i układy jednostek; proces
pomiarowy; wybór metody i zasady pomiaru; błędy pomiarów; niepewność
wyników pomiarów; ogólna charakterystyka przyrządów pomiarowych;
pomiar czasu i częstotliwości; pomiar napięcia stałego i zmiennego;
oscyloskopy elektroniczne; pomiary składowych impedancji RLC; karty
pomiarowe; systemy pomiarowe, oprogramowanie systemów pomiarowych.
Słowa
kluczowe
Metrologia; pomiar; błędy pomiarów; niepewność wyników pomiarów;
przyrządy pomiarowe; pomiary wielkości elektrycznych; systemy pomiarowe.
Wykład
Prawne aspekty miar: Konwencja Metryczna, Międzynarodowe Biuro Miar i Wag,
Generalna Konferencja Miar, GUM.
Istota pomiaru: wielkości fizyczne i wartości wielkości, pomiar, wzorzec miary, hierarchia
wzorców, trasabilność, skale pomiarowe, jednostki miar i układy jednostek, jednostki
podstawowe i pochodne, układ jednostek SI. Proces pomiarowy: pomiar, obiekt pomiaru,
model obiektu, miara wielkości, warunki odniesienia, warunki znamionowe użytkowania.
Wybór metody i zasady pomiaru: metoda pomiarowa, zasada pomiarowa, klasyfikacja metod
pomiarowych.
Błędy pomiarów, błąd bezwzględny i względny, klasyfikacja błędów wg własności
statystycznych, klasyfikacja ze względu na warunki pomiaru. Dokładność przyrządów
pomiarowych, błąd dopuszczalny przyrządu i sposoby jego wyrażania, oddziaływanie
przyrządu na wielkość mierzoną. Niepewność wyników pomiarów: składniki niepewności
typu A i B, niepewność standardowa, złożona niepewność standardowa, niepewność
rozszerzona, szacowanie złożonej niepewności standardowej przy pomiarach metodą
pośrednią.
Ogólna charakterystyka przyrządów pomiarowych: schemat blokowy, równanie
przetwarzania, statyczne i dynamiczne charakterystyki przyrządów pomiarowych.
Pomiar czasu i częstotliwości: sekunda, wzorce częstotliwości, zegar atomowy,
częstościomierz i czasomierz cyfrowy, błąd zliczania, błąd dopuszczalny dla funkcji pomiaru
częstotliwości i okresu.
Pomiar napięcia: wzorce napięcia, zjawisko Josephsona, przetworniki c/a i a/c,
charakterystyki i błędy przetworników c/a i a/c, kryterium Nyquista, zjawisko aliasingu.
Pomiar napięcia zmiennego: miary okresowego napięcia przemiennego, przetworniki napięcia
zmiennego na napięcie stałe.

62
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Oscyloskopy elektroniczne: oscyloskop analogowy, oscyloskop cyfrowy, próbkowanie
stroboskopowe.
Pomiary składowych impedancji RLC: wzorce rezystancji, zjawisko kwantowe Halla,
układy mostkowe, mostek Wheastone’a, mostki prądu przemiennego, cyfrowy pomiar
składowych RLC.
Karty pomiarowe. Systemy pomiarowe, oprogramowanie systemów pomiarowych,
środowisko LabVIEW.
Zajęcia laboratoryjne
1. Pomiary czasu i częstotliwości
2. Pomiarowe zastosowanie oscyloskopu
3. Badanie przetworników c/a
4. Przetwornik a/c kompensacyjny
5. Badanie karty pomiarowej
6. Badanie woltomierza z podwójnym całkowaniem
7. Pomiar napięcia przemiennego
8. Czujniki przyspieszenia
9. Czujniki temperatury
10. Czujniki tensometryczne i ciśnienia
11. Badanie przebiegów za pomocą oscyloskopu cyfrowego
12. Pomiary RLC
Wyposażenie laboratoryjne
Laboratorium składa się z 12 niezależnych stanowisk z wyposażeniem dostosowanym do
potrzeb poszczególnych ćwiczeń. W skład wyposażenia wchodzą: multimetry, generatory
przebiegów, oscyloskopy analogowe i cyfrowe, mostki i mierniki RLC, czasomierze i
częstościomierze cyfrowe, komputery PC z kartami pomiarowymi i oprogramowaniem
specjalistycznym (LabVIEW), czujniki do pomiaru temperatury, ciśnienia, przyspieszenia,
tensometry, testery przetworników c/a i a/c, zasilacze i inny sprzęt.
Metody nauczania
Wykład jest prowadzony metodą tradycyjną, częściowo ilustrowany slajdami, wzbogacony
o prezentacje przyrządów pomiarowych i programów komputerowych.
Laboratorium odbywa się w
sekcjach kilkuosobowych. Studenci poznają funkcje
i właściwości przyrządów pomiarowych, badają ich charakterystyki dokładnościowe,
wykonują pomiary wybranych wielkości fizycznych i szacują niepewność ich wyników.
Warunki zaliczenia
Zaliczenie wykładu na podstawie dwóch sprawdzianów. Zaliczenie laboratorium na
podstawie indywidualnego zaliczania poszczególnych ćwiczeń. Egzamin pisemny obejmujący
zagadnienia z wykładu i ćwiczeń laboratoryjnych.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: fizyki, elektrotechniki i elektromechaniki, rachunku
prawdopodobieństwa i statystyki, dynamiki układów, podstaw elektroniki.
Literatura podstawowa
1. Piotrowski J.: Podstawy miernictwa, WNT, Warszawa, 2002
2. Marcyniuk A.: Podstawy miernictwa elektrycznego dla kierunku elektronika, skrypt
Pol.Śl., Wyd. Pol.Śl., Gliwice 2002
Literatura uzupełniająca
1. Chwaleba A., Poniński M., Siedlecki A.: Metrologia elektryczna, WNT, Warszawa, 1994
2. Piotrowski J., Kostyrko K.: Wzorcowanie aparatury pomiarowej, PWN, Warszawa, 2000

63
3. Wyrażnie niepewności pomiarów. Przewodnik, GUM, Warszawa, 1995
4. Międzynarodowy słownik podstawowych i ogólnych terminów metrologii, GUM,
Warszawa, 1995
FUNDAMENTALS OF MEASUREMENTS
Objective
The major purpose of the course is to present basic concepts, objects and methods of
measurement. There is also discussed construction and principle of operation of measuring
instruments. Students are supposed to be able to prepare and perform laboratory
measurements, to assess obtained results and to estimate their uncertainty.
Description
Legal aspects of measurements. Concept of measurement. Units of measure and systems of
units. Measuring method and principle. Error of measurement. Uncertainty of measurement.
Characteristics of measuring instruments. Time and frequency measurements. Voltage
measurements. Oscilloscopes. Resistance, capacitance and inductance measurements. Data
acquisition boards. Measurement systems.
Keywords
Metrology; measurement; error of measurement; uncertainty of measurement; measuring
instruments; measurement systems.

64
Program studiów I-ego stopnia na kierunku automatyka i robotyka
SYSTEMY OPERACYJNE
Przedmiot obowiązkowy
Prowadzący Dr
inż. Dariusz Bismor, Dr inż. Jacek Loska, Dr inż. Janusz Wyrwał
(dariusz.bismor@polsl.pl, jacek.loska@polsl.pl, janusz.wyrwal@polsl.pl)
Rozkład Semestr
4
5
W
2
–
Ćw
–
–
Lab
–
2
Proj
–
–
Sem
–
–
Egz
–
–
ECTS
2
2
Cel
Celem przedmiotu jest zapoznanie studentów z budową i użytkowaniem sys-
temów operacyjnych, w tym systemów operacyjnych czasu rzeczywistego.
Poznanie systemu powinno pozwolić nie tylko na jego użytkowanie, ale
również dać wiedzę dotyczącą budowy jądra systemu operacyjnego, realizacji
jego podstawowych funkcji, pisania programów korzystających z
niskopoziomowych funkcji systemu oraz pisania własnych programów
użytkowych dla różnych systemów operacyjnych.
Opis Pojęcia podstawowe. Zarys architektury komputerów. Budowa i zadania
systemu operacyjnego. Funkcje jądra systemu operacyjnego. Metody obsługi
przerwań. Komunikacja między procesami. Budowa i administracja systemu
Microsoft Windows. System operacyjny Linux. Powłoka systemu operacyjnego
*nix. Administracja systemu operacyjnego Linux. Kompilacja jądra systemu
Linux. Pisanie modułów jądra systemu Linux. Środowisko graficzne X i KDE.
Pisanie programów dla KDE. Jądra dla systemów czasu rzeczywistego. System
operacyjny QNX. Synchronizacja wykonania procesów. Algorytmy
szeregowania. Niezawodność działania systemów, redundancja.
Słowa
kluczowe
System operacyjny; Microsoft Windows; Linux; QNX; eCos;
µCos; X-
Windows; KDE; systemy czasu rzeczywistego.
Wykład
Zarys architektury komputerów. Podstawy systemów operacyjnych: podstawowe pojęcia
dotyczące systemów operacyjnych, typy systemów, mechanizmy szeregowania i komunikacji
procesów, zadania poszczególnych procesów i modułów, zasoby i ich ochrona. Metody
obsługi przerwań jedno i wielopoziomowe. Systemy dedykowane. Odporność na uszkodzenia
i awarie. Omówienie systemu operacyjnego Windows, budowa, administracja i
zabezpieczanie systemu.
System operacyjny Linux: podstawowe polecenia, powłoka systemu (shell) i skrypty
powłoki, proces uruchamiania systemu, jego przebieg i konfiguracja, najważniejsze procesy
systemowe, konfiguracja sieci oraz usług sieciowych, zabezpieczanie komputera pracującego
w sieci przed włamaniami, kompilacja pakietów oprogramowania, kompilacja jądra systemu,
pisanie własnych modułów jądra systemu Linux, pisanie własnych programów, wspomaganie
uruchamiania programów: automake i autoconf, środowisko X-Windows oraz KDE, pisanie
własnych programów okienkowych.
Podstawowe pojęcia związane z systemami operacyjnymi czasu rzeczywistego (RTOS).
Wymagania stawiane RTOS. Przegląd dostępnych na rynku systemów operacyjnych czasu
rzeczywistego i ich krótka charakterystyka (QNX, VxWorks,
µC/OS i inne). RTOS na tle
typowych systemów operacyjnych ogólnego użytku. System operacyjny QNX jako przykład
RTOS. Budowa wewnętrzna systemu QNX. Idea systemu operacyjnego o architekturze
opartej na mikrojądrze. Modułowa budowy systemu - skalowalność. Zadania jądra systemu.
Proces i jego atrybuty. Podstawowe mechanizmy komunikacji procesów: przesyłanie

65
wiadomości, wyzwalanie depozytów i przesyłanie sygnałów. Dodatkowe mechanizmy
komunikacji: potoki, kolejki fifo i współdzielenie obszaru pamięci. Mechanizmy
synchronizacji procesów. Rejestracja i wyszukiwanie nazw symbolicznych (zasady
komunikacji między procesami nie związanymi relacjami „pokrewieństwa”). Algorytmy
szeregowanie procesów. Wywłaszczanie. Przetwarzanie w
czasie rzeczywistym.
Przetwarzanie zagnieżdżonych przerwań. Stany procesów – analiza grafu stanów. Tworzenie
nowych i usuwanie istniejących procesów. Odmierzanie czasu (czasowe uzależnienia
procesów).
Zajęcia laboratoryjne
1. Podstawy powłoki systemów *nix. W ramach tego ćwiczenia studenci zapoznają się z pod-
stawowymi poleceniami powłoki systemu operacyjnego, umożliwiającymi wykonywanie
za-dań takich, jak poruszanie się w drzewie plików, tworzenie, kopiowanie, usuwanie i
przetwarzanie plików, zarządzanie procesami, itp.
2. Skrypty powłoki systemów *nix. W ramach tego ćwiczenia studenci nabywają praktycznej
umiejętności programowania i tworzenia własnych aplikacji (plików wsadowych) w środo-
wisku powłoki systemu operacyjnego *nix. Rozważa się zagadnienie wywoływania
skryptu z opcjami i parametrami tych opcji oraz odpowiednie ich przetworzenie i
odpowiednią reakcję skryptu zarówno na wyszczególnienie jak i brak wyszczególnienia
określonej opcji lub parametru w wywołaniu skryptu.
3. Podstawy administracji systemu Windows. W ramach tego ćwiczenia studenci nabywają
wiedzy i umiejętności konfiguracji i podstawowej administracji komputera z systemem
Microsoft Windows.
4. Podstawy administracji systemu Linux. W ramach tego ćwiczenia studenci poznają
zadania, które musi wykonywać każdy administrator systemu, takie jak dodawanie i
usuwani użytkowników, poznanie i zmiana konfiguracji startowej komputera z systemem
Linux oraz kompilacja jądra systemu.
5. Aplikacje okienkowe w środowisku Windows. W ramach ćwiczenia studenci wykonują
prostą aplikację w języku C służącą do prezentacji możliwości obsługi okien i
komunikatów systemu Microsoft Windows.
6. Aplikacje okienkowe w środowisku KDE. W ramach ćwiczenia studenci zapoznają się
z budową oprogramowania działającego w popularnym środowisku okienkowym KDE,
oraz z możliwością pisania własnych programów okienkowych wykorzystujących
darmowe wersje bibliotek i darmowe kompilatory.
7. Pisanie modułów jądra. W ramach tego ćwiczenia studenci piszą własne, proste moduły
jądra, korzystające z oferowanych przez jądro funkcji systemowych. Pierwsza grupa
modułów obejmuje proste moduły, których celem jest zaznajomienie studentów ze
strukturą samych modułów jądra. W końcowej części laboratorium eksperymentuje się z
bardziej za-awansowanymi modułami służącymi do obsługi urządzeń znakowych.
8. Podstawowe mechanizmy komunikacji między procesami w systemie QNX. Zajęcia
laboratoryjne poświęcone są praktycznemu opanowaniu podstawowych mechanizmów
komunikacji między procesami w systemie operacyjnym QNX takich jak: przesyłanie
wiadomości, wyzwalanie depozytów, przesyłanie sygnałów.
9. Dodatkowe mechanizmy komunikacji między procesami w systemie QNX. Zajęcia
laboratoryjne poświęcone są praktycznemu opanowaniu dodatkowych mechanizmów
komunikacji między procesami w systemie operacyjnym QNX takich jak: potoki, kolejki
FIFO, współdzielenie obszaru pamięci.
10. Wieloprocesowa aplikacja w systemie QNX. W ramach zajęć laboratoryjnych studenci
wykonują aplikację składająca się z wielu współbieżnie wykonujących się procesów
wykorzystując poznane mechanizmy komunikacji międzyprocesowej.

66
Program studiów I-ego stopnia na kierunku automatyka i robotyka
11. Programowanie jąder czasu rzeczywistego cz. 1. W ramach tego ćwiczenia studenci na-
bywają umiejętności tworzenia zadań i przekazywania danych pomiędzy zadaniami za
pomocą podstawowych struktur komunikacyjnych udostępnianych przez jądro systemu
µC/OS, typu skrzynka pocztowa i kolejka.
12. Programowanie jąder czasu rzeczywistego cz. 2. W ramach tego ćwiczenia studenci piszą
prostą aplikację dla systemu
µC/OS, pokazująca możliwości wykorzystania przerwań w
systemie czasu rzeczywistego.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 20 komputerów PC z zainstalowanymi trzema systemami
operacyjnymi: Microsoft Windows, Linux i QNX. Każdy komputer posiada właściwe dla
każdego z systemów operacyjnych narzędzia administracyjne oraz oprogramowanie
umożliwiające pisanie i kompilację programów.
Metody nauczania
Laboratorium odbywa się w dwuosobowych podsekcjach. Po krótkim wprowadzeniu do
ćwiczenia studenci opracowują, ściśle związane z tematyką danego ćwiczenia, zadanie
podane przez prowadzącego.
Warunki zaliczenia
Wykład jest zaliczany na podstawie wiedzy, którą studenci posiadają w zakresie zagadnień
poruszanych na wykładzie. Zaliczenie jest dokonywane na podstawie pisemnego testu, który
odbywa się na ostatnim z wykładów.
Zaliczenie zajęć laboratoryjnych jest warunkowane uzyskaniem zaliczenia wszystkich
ćwiczeń laboratoryjnych. Każde ćwiczenie laboratoryjne jest zaliczane, w trakcie jego
trwania, na podstawie oceny wiedzy studenta przystępującego do ćwiczenia oraz na
podstawie oceny pracy studenta w trakcie trwania ćwiczenia. W przypadku nie uzyskania
wystarczających postępów w pracy, prowadzący może zarządzić wykonanie zadania
dodatkowego, w postaci pisemnego opracowania bądź programu komputerowego,
związanego z tematyką ćwiczenia.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada przy-
gotowanie w zakresie: programowanie w języku C, programowanie orientowane obiektowo w
języku C++, technika cyfrowa, systemy mikroprocesorowe.
Literatura podstawowa
1. Mitchell, J. Oldham, A. Samuel: „Advanced Linux Programming”, New Riders Publishing,
2001r.
2. Silberschatz A., Galvin P.B., Gagne G., „Podstawy systemów operacyjnych”, wyd. 6
zmienione i rozsz., WNT 2005.
3. Sacha K.: „QNX – System Operacyjny” X-serwis SP. z o.o., Warszawa, 1995.
4. Proffitt B.: „Windows XP PL Professional: czarna księga”, Gliwice, Helion 2002.
Literatura uzupełniająca
1. Bott E., Siechert C.: „Bezpieczeństwo Microsoft Windows: Windows XP i Windows
2000”, Warszawa, Wydawnictwo RM, 2003.
2. Aivazian T.: „Linux Kernel 2.4 Internals”, http://www.faqs.org/docs/kernel_2_4/lki.html,
2002.
3. Rubini A., Corbet J.: „Linux Device Drivers, 2
nd
Edition”, O'Reilly & Associates, Inc.,
2001
4. Lerch W: „System Operacyjny QNX”, Quantum Korporacja Transferu Technologii,
Wrocław, 1995
5. http://www.linux.org/docs

67
OPERATING SYSTEMS
Objective
The aim of the course is to present selected operating systems, including real-time
operating systems, structure and use. Knowledge attained by students should allow not only
for use, but should also answer questions concerning internal operating system structure,
kernel structure and kernel functions. It should also allow for writing low-level system
functions and implementation of user programs for selected operating system.
Description
Basic concepts. Computer architecture. Operating system internal structure and functions.
Kernel functions. Interrupt handling methods. Interprocess communication. Microsoft
Windows operating system structure and administration. Linux operating system. *nix system
shell. Linux administration. Linux kernel compilation. Writing Linux kernel modules. X and
KDE graphical environments. Writing KDE applications. Real-time kernels. QNX operating
system. Process synchronization. Scheduling algorithms. Operating system reliability and
redundancy.
Keywords
Operating system; Microsoft Windows; Linux; QNX; eCos;
µCos; X-Windows; KDE;
real-time systems.

68
Program studiów I-ego stopnia na kierunku automatyka i robotyka
PODSTAWY AUTOMATYKI
Przedmiot obowiązkowy
Prowadzący Dr hab. inż. Marian Błachuta
(marian.blachuta@polsl.pl)
Rozkład Semestr
4
5
W
3
–
Ćw
2
–
Lab
–
2
Proj
–
–
Sem
–
–
Egz
–
E
ECTS
4
7
Cel Celem
wykładu jest przekazanie studentom podstawowych wiadomości
w zakresie analizy i projektowania układów regulacji o jednej zmiennej
regulowanej z wykorzystaniem regulatorów liniowych analogowych i ich
implementacji cyfrowych oraz regulatorów przekaźnikowych. Celem
ćwiczeń tablicowych i laboratoryjnych jest nabycie przez studentów umie-
jętności w zakresie analizy i projektowania tych układów, umożliwiające
efektywne wykorzystanie programów wspomagających projektowanie takich
jak MATLAB-SIMULINK, CC, etc.
Opis
Wprowadzenie do przedmiotu, pojęcia podstawowe. Struktura układu
regulacji. Stabilność układów zamkniętych. Elementy korekcyjne
i regulatory. Ocena jakości przebiegów. Elementy projektowania układów
regulacji z regulatorami analogowymi i cyfrowymi. Ograniczenia wartości
sygnałów, zjawisko windupu. Regulacja przekaźnikowa: prosta i z korekcją.
Słowa
kluczowe
Sprzężenie zwrotne; stabilność; regulacja ciągła; regulacja dyskretna,
regulacja przekaźnikowa.
Wykład
Wprowadzenie do przedmiotu: podstawowe pojęcia - proces, sterowanie jako
oddziaływanie na strumienie energii lub substancji. Elementy funkcjonalne układu
automatyki. Pojęcie sygnału oraz modelowanie układu automatyki: jednokierunkowość
przepływu sygnału, schematy funkcjonalne. Sterowanie w układzie otwartym i
zamkniętym. Klasyfikacje układów automatyki..
Repetytorium z zakresu modeli układów o parametrach skupionych: nieliniowe
równania stanu, punkt pracy, linearyzacja. Własności liniowych układów dynamicznych.
Macierz podstawowa, forma kanoniczna Jordana. Sterowalność, obserwowalność, postać
kanoniczna Kalmana, transmitancja, zera, bieguny, względny rząd, parametry Markowa.
Stabilność liniowych układów dynamicznych, wielomian charakterystyczny, kryterium
Hurwitza. Układy złożone: sterowalność, obserwowalność i stabilność układów połączonych
szeregowo i równolegle.
Struktura układu regulacji. Opis układu ze sprzężeniem zwrotnym w przestrzeni stanu.
Stabilność układów zamkniętych. Wielomian charakterystyczny układu zamkniętego i jego
tworzenie na podstawie struktury układu i opisu transmitancyjnego elementów.
Kryterium Nyquista. Stabilność układów z opóźnieniem.
Uchyb ustalony przy wymuszeniach wielomianowych i sinusoidalnych: regulacja z
modelem wewnętrznym, układy astatyczne, współczynniki uchybowe.
Ocena właściwości dynamicznych układów regulacji. Metody bazujące na rozkładzie
pierwiastków. Metoda linii pierwiastkowych. Metody częstotliwościowe. Elementy
korekcyjne i regulatory. Regulatory: P, PI, PD, PID. Analogowa realizacja regulatorów.
Dobór typu i strojenie parametrów regulatora. Reguły Zieglera-Nicholsa oraz metoda
QDR.

69
Układy z kompensacją zakłócenia (otwarte). Układy zamknięto-otwarte. Układy
kaskadowe.
Aproksymacja dyskretna układu ciągłego: dyskretne realizacje regulatorów ciągłych.
Projektowanie układu z regulatorem cyfrowym metodami regulacji ciągłej z
wykorzystaniem zmodyfikowanej transmitancji obiektu z ekstrapolatorem. Zmodyfikowane
nastawy QDR.
Ograniczenia wartości sygnałów w regulatorach i elementach wykonawczych, zjawisko
windowania w układach z regulatorami cyfrowymi.
Proste układy regulacji dwupołożeniowej. Związki pomiędzy częstotliwością przełączeń
przekaźnika a wielkością wahań sygnału regulowanego, wpływ parametrów układu i wartości
zadanej na przebiegi regulacji. Zmniejszanie wielkości wahań.
Regulatory dwupołożeniowe z korekcją, nibyciągły regulator PID. Regulatory krokowe.
Ćwiczenia tablicowe
Program ćwiczeń tablicowych jest ściśle związany z programem wykładów.
Rozwiązywane są przykłady ilustrujące wyłożoną na wykładzie teorią.
Zajęcia laboratoryjne
1. Elementy CAD układów regulacji - wprowadzenie do programu Matlab/Simulink. Zapoznanie
się z podstawowymi poleceniami środowiska Matlaba z Control Toolbox i wykorzystanie ich
do modelowania obiektów dynamicznych, uzyskiwania i analizy podstawowych
charakterystyk prostych układów regulacji, ciągłych i dyskretnych w czasie.
2. Stabilność i dokładność statyczna układów regulacji. Badanie stabilności za pomocą
kryterium Hurwitza i Nyquista. Analiza odpowiedzi czasowych UR. Badanie wpływu
struktury UR i nastaw elementów korekcyjnych na charakter odpowiedzi przejściowych i
dokładność statyczną.
3. Metoda linii pierwiastkowych. Zastosowanie metody do analizy zamkniętych UR. Badanie
zależności przebiegu linii pierwiastkowych od charakteru biegunów i zer układu
otwartego. Analiza własności linii pierwiastkowych. Dobór rodzaju i nastaw korektorów
poprawiających jakość charakterystyk UR. Porównanie układu z regulatorami PI, PID dla
nastaw uzyskanych z reguł Zieglera-Nicholsa.
4. Częstotliwościowe metody analizy UR. Wyznaczanie charakterystyk częstotliwościowych
wybranych elementów i ich odpowiedzi skokowych. Badanie związków pomiędzy
wskaźnikami częstotliwościowymi jakości a przebiegami czasowymi. Badanie wpływu
nastaw regulatora P, PI, PID na przebiegi charakterystyk zamkniętego układu.
5. Regulacja PID. Analiza własności UR z regulatorami PID. Dobór parametrów metodami:
Zieglera-Nicholsa, QDR, M
max
, dla zadanego zapasu amplitudy lub fazy. Porównanie
charakterystyk czasowych, częstotliwościowych oraz rozkładu zer i biegunów
zaprojektowanych układów zamkniętych.
6. Metody korekcji liniowych układów regulacji - układ stabilizacji napięcia
generatora. Badanie charakterystyk generatora napięcia stałego i układu otwartego. Dobór
parametrów korektorów PI oraz PD. Badanie przebiegów regulacji układu zamkniętego
bez korektorów i z korektorami, porównanie własności. Możliwe jest również
wykonywanie ćwiczenia w wariancie modelowym w programie Matlab.
7. Układy z regulatorami cyfrowymi PID. Nastawy QDR dla regulatora ciągłego. Dobór nastaw
regulatora cyfrowego na podstawie skorygowanego modelu obiektu i kryterium QDR dla kilku
wartości okresu dyskretyzacji. Analiza wpływu okresu próbkowania na własności regulacji.
Przybliżona analiza stabilności. Badanie wpływu nastaw regulatorów na własności
dynamiczne układu zamkniętego, porównanie z układami ciągłymi.
8. Wpływ nieliniowości na jakość UR. Modelowanie układu regulacji z nasyceniem sygnału
sterującego. Badanie wpływu nasycenia na jakość sterowania. Sposoby eliminacji efektu
windowania, badania symulacyjne uzyskanych układów regulacji. Porównanie
uzyskanych efektów.

70
Program studiów I-ego stopnia na kierunku automatyka i robotyka
9. Regulacja dwupołożeniowa. Badania symulacyjne układu z przekaźnikiem
dwupołożeniowym - analiza w dziedzinie czasu. Badanie wpływu parametrów układu na
częstotliwość oscylacji, amplitudę wahań i wartość średnią sygnału wyjściowego obiektu.
Wyznaczanie transmitancji zastępczej dla obiektów cieplnych. Porównanie przebiegów
uzyskanych w układzie z obiektem i modelem zastępczym.
10. Regulacja nibyciągła PID. Badanie własności regulatora dwupołożeniowego z korekcją
oraz regulatora krokowego. Porównanie układu regulacji z regulatorem analogowym oraz
nibyciągłym dwupołożeniowym przy tej samej wartości maksymalnej sygnału regulującego
11. Regulacja poziomu cieczy w układzie dwóch zbiorników - rzeczywiste stanowisko
laboratoryjne. Identyfikacja parametrów statycznych i dynamicznych układu z jednym i z
dwoma zbiornikami. Badanie wpływu nastaw regulatora P oraz PI na przebiegi
regulacji.
Wyposażenie laboratoryjne
Sala 923 - sześć stanowisk z komputerami PentiumIV, 2,8Ghz, trzy współdzielone
drukarki umożliwiające sporządzanie dokumentacji ćwiczenia.
Sala 925 - stanowiska fizyczne: 1) Sterowanie położeniem kuli na
płaszczyźnie z komputerem 486 DX/50 i drukarką. 2) Model helikoptera sterowany
komputerem 486 DX/66. 3) Układ zbiorników sterowany komputerem 486 DX2S z
drukarką. 4) Układ lewitacji magnetycznej sterowany komputerem HP (stacja SIA)
Intel Celeron 466. 5) Układ lewitacji pneumatycznej ze sterownikiem mikrokontrolera
PIC 16F877.
Sala 935 - sześć stanowisk z komputerami PentiumIV, l,8Ghz, trzy współdzielone
drukarki.
Komputery wyposażone są w programy: CC, MATLAB-SIMULINK, PSIE.
Laboratorium wydziałowe: 30 komputerów.
Metody nauczania
Wykład i ćwiczenia tablicowe - przy wykorzystaniu tablicy i kredy. Ćwiczenie
laboratoryjne - studenci pracują przy stanowiskach laboratoryjnych, komputerowych lub
fizycznych
Warunki zaliczenia
Ćwiczenia tablicowe - uzyskanie pozytywnej noty średniej z przeprowadzonych
ćwiczeń kontrolnych.
Ćwiczenia laboratoryjne - zaliczenie każdego z dziewięciu ćwiczeń laboratoryjnych na
podstawie wykazania się odpowiednim przygotowaniem do ćwiczenia i opracowania
odpowiedniego sprawozdania z ćwiczenia.
Egzamin jest pisemny i składa się z dwu części: zadań i odpowiedzi na pytania testowe.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie liniowych równań różniczkowych z wymuszeniem
dystrybucyjnym oraz ich rozwiązywania z wykorzystaniem transformacji Laplace’a, oraz
równań różnicowych i transformacji Z. Zakłada się znajomość pojęcia modelu układu
dynamicznego w postaci równań stanu, transmitancji, odpowiedzi impulsowych
i
skokowych oraz charakterystyk częstotliwościowych podstawowych układów
dynamicznych łącznie z opóźnieniem.
Literatura podstawowa
1. Gessing R. Teoria sterowania T.1. Układy liniowe, Skrypt Pol.Śl., Gliwice, 1991, Wyd. 2.
2. Kaczorek T.: Teoria sterowania T.1. PWN, W-wa 1977.
3. Skrzywan-Kosek A., Świerniak A., Baron K., Latarnik M.: Zbiór zadań z teorii liniowych
układów regulacji, Skrypt Pol. Śl., Gliwice, 1999, Wyd.IV.

71
4. Błachuta M. (red.) Laboratorium Teorii Sterowania i Podstaw Automatyki, Skrypt Pol. Śl.,
Gliwice, 1998
Literatura uzupełniająca
1. Takahashi Y., Rabins M.J., Auslander D.M.: Sterowanie i Systemy Dynamiczne, WNT,
W-wa 1976.
2. Kurman K.J.: Teoria Regulacji. Podstawy, Analiza, Projektowanie, WNT, W-wa 1975.
3. Phillips CL., Harbor R.D.: Feedback Control Systems (Third Edition) Prentice Hall, 1996.
4. Goodwin G.C., Graebe S.F., Salgado M.E.: Control Systems Design, Prentice Hall, 2001
CONTROL FUNDAMENTALS
Objective
The objective of the lectures is to give the basic knowledge in the field of analysis and design
of linear control systems, both continuous-time and sampled-data. The objective of the class
and lab exercises is to acquire some practice in the field of analysis and design of these
systems, using advanced computer aided design systems like MATLAB-SIMULINK, CC, etc.
Description
Introduction to the course. Basic notions. Stability of linear dynamical systems.
Feedback control systems. Closed-loop system stability. Compensators and controllers.
Control quality assessment. Design of control systems with analog and digital controllers.
Limitation of control signals, controller windup. Relay control systems.
Keywords
Feedback; stability; analog control; digital control; relay control.

72
Program studiów I-ego stopnia na kierunku automatyka i robotyka
SYSTEMY MIKROPROCESOROWE
Przedmiot obowiązkowy
Prowadzący Dr
inż. Krzysztof Czyż, Dr inż. Aleksander Staszulonek
(krzysztof.czyz@polsl.pl, aleksander.staszulonek@polsl.pl)
Rozkład Semestr
5
W
2
Ćw
–
Lab
2
Proj
–
Sem
–
Egz
–
ECTS
3
Cel
Celem przedmiotu jest przekazanie praktycznej i teoretycznej wiedzy
dotyczącej zasad działania systemów mikroprocesorowych oraz możliwości
zastosowania tych systemów
w nowoczesnych układach sterowania.
Ponadto
w ramach przedmiotu przekazywana jest wiedza na temat projektowania,
konstruowania i uruchamiania systemów mikroprocesorowych oraz tworzenia
oprogramowania wbudowanego i systemowego.
Podczas
ćwiczeń
laboratoryjnych studenci mają możliwość zdobycia wiedzy praktycznej na
stanowiskach wyposażonych w
najpopularniejsze 8-, 16- oraz 32-bitowe
mikrokontrolery.
Opis
Pojęcia podstawowe; struktura i organizacja systemów mikroprocesorowych;
bloki funkcjonalne mikroprocesora; jednostka arytmetyczno-logiczna, rejestry
ogólnego przeznaczenia, rejestry dedykowane, stos, układ sterowania,
magistrale wewnętrzne; cykl wykonywania rozkazu, cykle maszynowe, praca
potokowa; tryby adresowania; budowa pamięci; zasady dostępu do pamięci;
organizacja współpracy procesora z peryferiami; system przerwań w systemie
mikroprocesorowym; układ bezpośredniego dostępu do pamięci;
programowalne uniwersalne i specjalizowane układy wejść-wyjść,
przetworniki A/C, C/A; układy liczników; układy komunikacyjne: transmisja
szeregowa, transmisja równoległa; mikrokomputery jedno układowe i ich
zastosowanie; procesory sygnałowe i ich zastosowanie; projektowanie,
budowa oraz uruchamianie systemów mikroprocesorowych; oprogramowanie
wbudowane w urządzenie (firmware); oprogramowanie systemowe.
Słowa
kluczowe
Mikroprocesor, mikrokontroler, urządzenie peryferyjne, projektowanie
systemu mikroprocesorowego, oprogramowanie wbudowane.
Wykład
1. Wprowadzenie - p
rzedstawienie planu i zakresu wykładu
, pojęcia podstawowe, struktura
i organizacja systemów mikroprocesorowych.
2. Bloki funkcjonalne mikroprocesora: jednostka arytmetyczno-logiczna, rejestry ogólnego
przeznaczenia, rejestry dedykowane, stos, układ sterowania, magistrale wewnętrzne.
3. Cykl wykonywania rozkazu, cykle maszynowe, praca potokowa; analiza funkcjonalna
oraz czasowa.
4. Tryby adresowania, budowa oraz zasady dostępu do pamięci; organizacja współpracy
procesora z peryferiami: szyna danych, adresowa, kontrolna, zależności czasowe. Układ
bezpośredniego dostępu do pamięci: zasady transmisji.
5. System przerwań w systemie mikroprocesorowym, źródła i typy przerwań, mechanizmy
ich obsługi.
6. Architektura mikroprocesorów z rodziny Motorola 68k.
7. Zasady współpracy systemu mikroprocesorowego z otoczeniem; układy wejść-wyjść
równoległych; układy przetworników A/C, C/A.

73
8. Układy liczników w systemie mikroprocesorowym: zasada działania, zastosowania; układ
watchdog.
9. Układy komunikacyjne - transmisja szeregowa, zasada działania, zastosowania: transmisja
asynchroniczna, synchroniczna, protokoły.
10. Mikrokomputery jednoukładowe: architektura oraz zastosowania na przykładzie
mikrokontrolera 16-bitowego z rodziny Renesas H8.
11. Procesory sygnałowe (DSP) i ich zastosowania: architektura, arytmetyka stało-, zmienno-
pozycyjna, organizacja dostępu do pamięci, instrukcje specjalizowane, przykłady
zastosowań.
12. Systemy mikroprocesorowe czasu rzeczywistego; oprogramowanie wbudowane w
urządzenia (firmware), oprogramowanie systemowe.
13. Projektowanie, budowa oraz uruchamianie systemów mikroprocesorowych: narzędzia
EDA, dokumentacja produkcyjna, uruchamianie systemu (debugery, emulatory, JTAG).
14. Kolokwium.
Zajęcia laboratoryjne
Zajęcia laboratoryjne składają się z 12 ćwiczeń o różnym stopniu trudności. Pierwsze pięć
ćwiczeń wprowadza podstawy budowy oraz programowania w języku C i asemblerze systemów
mikroprocesorowych opartych o architekturę x86. Podczas kolejnych ćwiczeń laboratoryjnych
studenci poznają systemy mikroprocesorowe oparte o najpopularniejsze mikrokontrolery 8-, 16-
oraz 32-bitowe.
Tematy zajęć laboratoryjnych:
1. Obsługa portu równoległego LPT; techniki uruchamiania oraz debugowania oprogramowania.
2. Układ liczników-timerów (i8254); wprowadzenie do asemblera x86.
3. System przerwań – generacja melodii w oparciu o układ liczników-timerów (PC speaker).
4. Układ portów szeregowych (i16550) – terminal pracujący na przerwaniach.
5. Protokoły transmisji szeregowej – protokół MODBUS.
6. Kolokwium
7. Mikrokontroler AVR (8bit) – porty wejść/wyjść.
8. Mikrokontroler AVR (8bit) – układ liczników-timerów, sterowanie silnikiem krokowym.
9. Mikrokontroler H8 (16bit) – porty szeregowe, komunikacja ze sterownikiem przemysłowym.
10. Mikrokontroler H8 (16bit) – wyświetlacz LCD.
11. Mikrokontroler ARM (32bit) – protokoły transmisji szeregowej SPI, USB.
12. Mikrokontroler ARM (32bit) – przetworniki A/C, C/A.
13. Procesory dedykowane dla przetwarzania sygnałów (TI TMS320C6713).
Wyposażenie laboratoryjne
Laboratoria (3 sale) wyposażone w komputery klasy IBM PC z mikroprocesorem
Pentium IV (24 szt.) wyposażone w układy uruchomieniowe z procesorami AVR Mega128 +
emulator JTAG (10 szt.), Renesas H8TINY + emulator Renesas E7 (10 szt.), Atmel
AT91SAM7S256 + emulator JTAG (10 szt.) oraz Texas Instruments TMS320C6713 +
emulator (10 szt). Dodatkowo na komputerach zainstalowane oprogramowanie
specjalistyczne w tym niezbędne kompilatory języków asembler, C oraz debugery i/lub
emulatory dla procesorów AVR, H8, ARM, TMS320C6713 oraz x86. Sterowniki
przemysłowe PLC (5 szt.) oraz dodatkowo kable do komunikacji szeregowej, USB, testery
portu LPT (diody LED + przyciski), głośniki komputerowe, mikrofony.
Metody nauczania
Wykład jest ilustrowany slajdami, wzbogacony o prezentacje omawianych systemów
mikroprocesorowych oraz przykłady ich praktycznego zastosowania.
Laboratorium odbywa się w sekcjach co najwyżej 2-osobowych. Do dyspozycji studentów
komplet instrukcji do ćwiczeń laboratoryjnych. Po wprowadzeniu do danego ćwiczenia
laboratoryjnego studenci opracowują i implementują na sprzęcie laboratoryjnym postawione
przez prowadzących zadania.

74
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Warunki zaliczenia
Każde z 12 zajęć laboratoryjnych punktowane jest w skali od 0 do 5 punktów. Na uzyskaną
liczbę punktów wpływają przygotowanie do zajęć oraz poprawność rozwiązania
postawionego zadania.
Warunkiem zaliczenia przedmiotu jest przystąpienie do dwóch kolokwiów punktowanych od
0 pkt. do 20 pkt. każde, uzyskanie minimum 3 punktów z co najmniej 10 punktowanych zajęć
laboratoryjnych oraz uzyskanie łącznej liczby punktów nie mniejszej, niż 60.
Skala ocen jest następująca:
0 – 59 pkt. – brak zaliczenia
60 – 67 pkt. – ocena 3.0
68 – 75 pkt. – ocena 3.5
76 – 83 pkt. – ocena 4.0
84 – 91 pkt. – ocena 4.5
92 – 100 pkt. – ocena 5.0
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: programowania obliczeń komputerowych, podstaw elektroniki,
techniki cyfrowej.
Literatura podstawowa
1. A. Niederliński: Mikroprocesory, mikrokomputery, mikrosystemy, Wydawnictwa Szkolne
i Pedagogiczne, 1988.
2. F. Haugg: Poznaj swój komputer, Wydawnictwa Naukowe i Techniczne, 1986.
3. S.A. Money: Mikroprocesory - poradnik, Wydawnictwa Komunikacji i Łączności, 1996.
4. R. Pełka: Mikrokontrolery, architektura, programowanie, zastosowania,
Wydawnictwa
Komunikacji i Łączności, 2000.
5. P. Hadam: Projektowanie systemów mikroprocesorowych, Wydawnictwo BTC, 2004.
Literatura uzupełniająca
1. Karty katalogowe układów oraz noty aplikacyjne.
2. R. Krzyżanowski: Układy mikroprocesorowe, Wydawnictwo MIKOM, 2004.
3. P. Metzger, Anatomia PC Wydanie IV-VIII, Wydawnictwo Helion 1998-2003.
4. http://www.dspdesignline.com/
MICROPROCESSOR SYSTEMS
Objective
The aim of the course is to present practical and theoretical knowledge concerning microproc-
essor systems and their application in modern automatic control systems. Moreover, during the
course aspects of design, development and evaluation of microprocessor systems are discussed.
During laboratory exercises the practical knowledge using the most popular 8-bit, 16-bit and 32-
bit microcontrollers is gained.
Description
Basic definitions; structure and architecture of microprocessor systems; microprocessor
functional blocks: arithmetic-logic unit, registers, control unit, internal buses; instruction exe-
cution cycle; addressing modes; memory architectures; memory access rules; interrupt service
unit; direct memory access unit; programmable input/output; A/D D/A converters; timer-
counter; communication peripherals: serial, parallel transmission; system on chip; digital sig-
nal processors;
designing, development and putting into operation microprocessor systems;
firmware; system software.
Keywords
Microprocessor, microcontroller, peripheral
device, microprocessor system, firmware
.

75
PODSTAWY CYFROWEGO PRZETWARZANIA SYGNAŁÓW
Przedmiot obowiązkowy
Prowadzący Dr hab. inż. Jarosław Figwer
(jaroslaw.figwer@polsl.pl)
Rozkład Semestr
5
W
1
Ćw
–
Lab
1
Proj
–
Sem
–
Egz
–
ECTS
3
Cel
Celem przedmiotu jest: a) zapoznanie studentów z podstawowymi metodami
cyfrowego przetwarzania sygnałów; b) nauczenie praktycznego wykorzystania
poznanych metod do konstruowania algorytmów cyfrowego przetwarzania
sygnałów; c) nauczenie posługiwania się nowoczesnym sprzętem
komputerowym do przetwarzania sygnałów. Dodatkowym celem wykładu jest
przygotowanie studentów do korzystania z literatury fachowej z zakresu
przedmiotu.
Opis Pojęcia podstawowe; wstępne przetwarzanie sygnałów; dyskretna transformata
Fouriera i jej zastosowania; analiza widmowa; filtracja cyfrowa; sprzęt do
cyfrowego przetwarzania sygnałów.
Słowa
kluczowe
Cyfrowe przetwarzanie sygnałów; próbkowanie i rekonstrukcja sygnałów;
dyskretna transformata Fouriera; filtracja cyfrowa; filtry o skończonej
odpowiedzi impulsowej; filtry o nieskończonej odpowiedzi impulsowej;
analizatory widmowe; procesory sygnałowe.
Wykład
1. Wprowadzenie: sformułowanie pojęcia cyfrowego przetwarzania sygnałów; klasyfikacja
sygnałów; elementarne operacje na sygnałach.
2. Wstępne przetwarzanie sygnałów: próbkowanie i rekonstrukcja sygnałów; efekt
stroboskopowy; kwantyzacja; decymacja i interpolacja; normalizacja; usuwanie trendów,
składowych okresowych oraz danych wtrąconych przypadkowo.
3. Dyskretna nieskończona transformata Fouriera: definicja, własności i zastosowania.
4. Dyskretna skończona transformata Fouriera: definicja, własności oraz algorytmy jej
obliczania; wyciek widma oraz efekt palisadowy; rozdzielczość widmowa; okna czasowe -
definicja, własności oraz podstawowe parametry; przykłady okien czasowych;
zastosowanie dyskretnej transformaty Fouriera do analizy sygnałów w dziedzinie
częstotliwości oraz w dziedzinie czasu; analizatory sygnałów.
5. Filtracja cyfrowa: rodzaje filtrów cyfrowych i ich własności; stabilność filtrów,
charakterystyki filtrów idealnych; parametry filtrów rzeczywistych; własności filtrów FIR;
metody projektowania filtrów FIR; realizacje filtrów FIR; filtry IIR - własności oraz
ograniczenia; metody projektowania filtrów IIR; analogowe filtry Butterwortha,
Czebyszewa i eliptyczne; projektowanie filtrów IIR metodą idealnego filtru
dolnoprzepustowego; struktury implementacyjne filtrów IIR.
6. Sprzęt do cyfrowego przetwarzania sygnałów: metodologia projektowania systemów do
cyfrowego przetwarzania sygnałów; procesory sygnałowe.
Zajęcia laboratoryjne
1. Próbkowanie i rekonstrukcja sygnałów.
2. Wstępne przetwarzanie danych, decymacja i interpolacja.
3. Dskretna tranformata Fouriera.
4. Analiza widmowa sygnałów.

76
Program studiów I-ego stopnia na kierunku automatyka i robotyka
5. Projektowanie filtrów cyfrowych IIR.
6. Projektowanie filtrów cyfrowych FIR.
Wyposażenie laboratoryjne
4 laboratoria: 3 laboratoria ogólnego przeznaczenia, każde wyposażone w 10 komputerów PC
z oprogramowaniem specjalistycznym (w tym Matlab/Simulink; MULTI-EDIP; CCStudio)
oraz laboratorium Aktywnego Tłumienia Hałasu, wyposażone w 4 komputery PC ze
stanowiskami tworzenia przestrzennych stref ciszy. Laboratoria wyposażone są dodatkowo
w 7 zestawów płyt ze stało i zmiennoprzecinkowymi procesorami sygnałowymi firmy
TMS320C6713 i TMS320C6416 Texas Instruments wraz z głośnikami i mikrofonami, 2 karty
DS1102 procesora sygnałowego TMS320C31 oraz 2 karty DS1104 z procesorem PowerPC.
Metody nauczania
Wykład prowadzony jest metodą tradycyjną wzbogaconą o prezentacje programów
komputerowych.
Zajęcia laboratoryjne prowadzone są w dwuosobowych podsekcjach. Studenci realizują,
w zależności od tematu ćwiczenia zadania o charakterze analitycznym lub projektowym.
Warunki zaliczenia
Zaliczenie wykładu na podstawie kolokwium.
Zaliczenie laboratorium na podstawie indywidualnego zaliczania poszczególnych ćwiczeń.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie wykładanym w ramach przedmiotów dynamika układów oraz
podstawy automatyki.
Literatura podstawowa
1. A.V.Oppenheim and R.W.Schafer: Cyfrowe przetwarzanie sygnałów. Wydawnictwa
Kominikacji i Łączności, Warszawa 1999.
2. R.G. Lyons: Wprowadzenie do cyfrowego przetwarzania sygnałów, Wydawnictwa
Komunikacji i Łączności, Warszawa 2000.
3. T. P. Zieliński: Cyfrowe przetwarzanie sygnałów. Od teorii do zastosowań. Wydawnictwa
Kominikacji i Łączności, Warszawa 2005.
4. E. Bielińska, J. Figwer: Analiza, identyfikacja i predykcja ciągów czasowych. Skrypty Pol.
Śl. nr 923, 1995.
5. A. Niederliński, J. Kasprzyk, J. Figwer: MULTI-EDIP – analizator wielowymiarowych
sygnałów i obiektów. Skrypty Pol. Śl. nr 2017, 1997.
Literatura uzupełniająca
1. D.J. DeFatta, J.G. Lucas and W.S. Hodgkiss. Digital Signal Processing: A System Design
Approach. John Wiley & Sons, Inc., New York, 1992.
2. J.S. Bendat, A.G. Piersol. Random Data Analysis and Measurement Procedures. John
Wiley & Sons, Inc., New York, 1986.
3. H.J. Nussbaumer. Fast Fourier Transform and Convolution Algorithms. Springer Verlag,
New York, 1982.
4. J.S. Orfanides. Optimum signal processing. An introduction. Macmillan Publishing Co,
New York, 1988.
5. S.W. Smith: The Scientist and Engineer's Guide to Digital Signal Processing,
http://www.dspguide.com/
DIGITAL SIGNAL PROCESSING FUNDAMENTALS
Objective
The purpose of this course is to: a) instruct students in basic digital signal processing
methods; b) prepare students to employ digital signal processing techniques in development

77
of digital signal processing algorithms; c) introduce students into digital signal processing
hardware. Additionall aim of the course is to prepare studets for taking an advatage of digital
signal processing literature.
Description
Basic concepts; initial signal processing; discrete Fourier transform and its applications;
spectral analysis; digital filtration; digital signal processing hardware.
Keywords
Digital signal processing ; signal sampling and reconstruction; discrete Fourier transform ;
digital filtration ; finite impulse response filters ; infinite impulse response filters ; signal
analyzers ; signal processors.

78
Program studiów I-ego stopnia na kierunku automatyka i robotyka
TECHNOLOGIE INTERNETOWE
Przedmiot obowiązkowy
Prowadzący Dr
inż. Jerzy Mościński
(jerzy.moscinski@polsl.pl)
Rozkład Semestr
5
W
2
Ćw
–
Lab
–
Proj
2
Sem
–
Egz
–
ECTS
3
Cel
Celem przedmiotu jest zapoznanie studentów z aktualnymi technologiami
dotyczącymi programowania w sieci Internet i efektywnego wykorzystywania
usług internetowych. Istotnym elementem składowym przedmiotu są
technologie budowy i wykorzystywania systemów baz danych z dostępem za
pośrednictwem sieci Internet. W ramach przedmiotu zostaną również
usystematyzowane informacje dotyczące sieci komputerowych jako podstawy
usług internetowych.
Opis
W ramach przedmiotu zostaną przedstawione następujące podstawowe i
zaawansowane grupy zagadnień związane z technologiami internetowymi i ich
wykorzystaniem do budowy aplikacji internetowych: podstawy
funkcjonowania intersieci, warstwowy model TCP/IP sieci komputerowej,
protokoły internetowe, protokół HTTP i architektura systemów WWW;
dynamiczne i rozproszone elementy funkcjonowania systemów WWW,
technologia JavaScript, Java i Ajax; bezpieczeństwo systemów i usług
internetowych; zdalne nauczanie. Szczególna uwaga zostanie poświęcona
internetowym bazom danych implementowanym w otoczeniu zestawu LAMP
– Linux, Apache, MySQL i PHP. Omówiona zostanie platforma ASP.NET i
powiązane języki i metody programowania. Przedstawione zostaną elementy
technologii Flash i języka ActionScript.
Słowa
kluczowe
Usługi internetowe; protokoły internetowe; aplikacje internetowe; internetowe
bazy danych; zdalne nauczanie; bezpieczeństwo usług internetowych;
wirtualne laboratoria; tele-laboratoria; sieciowe systemy komputerowe;
systemy zarządzania treścią; rozproszone aplikacje sieciowe.
Wykład
Wykład obejmuje zespół zagadnień wprowadzających do sieci komputerowych i ich
zastosowania jako podstawy dla budowy systemów internetowych i świadczenia usług z
wykorzystaniem technologii internetowych. Grupy zagadnień poruszanych na kolejnych
wykładach są przedstawione w kolejnych akapitach poniżej.
Podstawy funkcjonowania sieci komputerowych, przegląd typowych technologii
wykorzystywanych do realizacji komunikacji za pomocą sieci komputerowych. Zastosowania
sieci komputerowych i zagadnienia bezpieczeństwa i jakości usług świadczonych za pomocą
sieci.
Usługi w sieci Internet, sieć Internet jako przykład globalizacji sieci komputerowych,
uzyskiwanie dostępu do sieci Internet, zasoby sprzętowe i programowe niezbędne do
wykorzystywania usług internetowych.
Podstawy funkcjonowania intersieci, warstwowy model TCP/IP sieci komputerowej,
protokoły internetowe i ich związek z usługami internetowymi i technologiami
programowania aplikacji internetowych, przykładowe aplikacje internetowe związane z pracą
zdalną i transferem plików.

79
Wykorzystywanie technologii internetowych, protokół HTTP i architektura systemów
www, język HTML jako podstawowe narzędzie konstruowania systemów www, system CSS
kaskadowych arkuszy stylów.
Zaawansowane technologie internetowe w systemach www, język XML i jego narzędzia,
język MathML, język JavaScript, technologia Flash.
Technologie języka Java w programowaniu usług internetowych, aplikacje i aplety
programowane w języku Java, technologia serwletów i Java Beans, Java jako uniwersalna
platforma dla budowy interaktywnych aplikacji internetowych.
Technologie wykorzystywane do świadczenia usług bazodanowych z dostępem za pomocą
sieci Internet, technologia CGI i wczesne mechanizmy konstruowania interaktywnych
systemów www, technologie JSP i ASP dla usług bazodanowych, technologia PHP.
Konfiguracja serwerów www, konfiguracja relacyjnych systemów bazodanowych MySQL
i PostgreSQL, konfiguracja systemu PHP, przykład uruchomienia interaktywnego serwisu
www z usługami bazodanowymi.
Technologia Ajax łącząca asynchronicznie technologie JavaScript i XML w celu realizacji
nowych usług internetowych. Systemy zarządzania treścią – CMS – wspomagające tworzenie,
rozbudowę i zarządzanie serwisami WWW przez bezpośrednich użytkowników systemu.
Technologie zabezpieczeń w systemach internetowych, kontrola dostępu, szyfrowanie i
podpisy cyfrowe, zabezpieczenia na poziomie lokalnym, sieciowym i intersieciowym.
Technologie internetowe wykorzystywane w zdalnym nauczaniu, konstrukcja
autonomicznych internetowych systemów bazodanowych umożliwiających studiowanie w
systemach otwartych i zdalnych.
Wykorzystywanie technologii internetowych do zdalnej obsługi aparatury i urządzeń,
opracowywanie wirtualnych laboratoriów wykorzystujących technologie internetowe do
czystego i zwielokrotnionego dostępu do unikalnych stanowisk laboratoryjnych i aparatury
naukowo-badawczej.
Technologie internetowe w projektowaniu inżynierskim, technologie prezentacji i
publikowania wyników projektowania i prac badawczych z wykorzystaniem platformy
Internet.
Zajęcia projektowe
Tematy projektów są zmienne i są proponowane przez wykładowcę, innych prowadzących
w porozumieniu z wykładowcą lub z zewnątrz w porozumieniu z wykładowcą. Typowa
tematyka projektów dotyczy połączeń następujących zagadnień: programowanie stron
internetowych z wykorzystaniem języka HTML i kaskadowych arkuszy stylów;
wykorzystanie rozszerzeń technologii JavaScript w opracowywaniu stron internetowych;
programowanie apletów i aplikacji w języku Java i ich wykorzystywanie w systemach
internetowych; wykorzystanie języka Java do przygotowania materiałów wspomagających
nauczanie w dziedzinach inżynierskich; programowanie obiektowe w języku Java;
programowanie w języku PHP z wykorzystaniem internetowych baz danych; programowanie
systemów internetowych wspomagających komunikację pomiędzy nauczycielami i
studentami; programowanie systemów internetowych optymalizujących wybór tematu prac
projektowej lub dyplomowej; zaawansowane programowanie w języku PHP z
wykorzystaniem baz danych, formularzy i sesji; opracowywanie prezentacji w
wykorzystaniem technologii Flash i języka ActionScript; opracowywanie zaawansowanych
animacji z wykorzystaniem języka ActionScript; zaawansowane projekty internetowe z
wykorzystaniem technologii Java.
Wyposażenie laboratoryjne
Laboratoria są wyposażone w 24 komputery PC z oprogramowaniem umożliwiającym
realizację ćwiczeń laboratoryjnych i zadań projektowych, m.in. systemy operacyjne typu
Windows, Linux i Solaris oraz platformy umożliwiające programowanie z wykorzystaniem

80
Program studiów I-ego stopnia na kierunku automatyka i robotyka
języków i technologii związanych z przedmiotem. W laboratorium dostępne są również
urządzenia umożliwiające testowanie zagadnień dotyczących rutingu w sieciach
komputerowych oraz systemy internetowe umożliwiające komunikację pomiędzy
nauczycielami i studentami. W laboratorium istnieją możliwości testowania zagadnień
dotyczących tele-laboratoriów i nauczania zdalnego.
Metody nauczania
Wykład jest prowadzony z wykorzystaniem komputera i wideoprojektora. Wykładowca
omawia zagadnienia wykładowe z wykorzystaniem przygotowanych prezentacji i bieżącego
prezentowania i modyfikacji treści za pomocą elektronicznego tabletu. Materiał wykładowy
jest ilustrowany z wykorzystaniem technologii internetowych za pomocą technologii Flash,
Java i podobnych.
Zajęcia projektowe są wykonywane przez studentów indywidualnie. Tematy projektów są
prezentowane z wykorzystaniem Internetu przed pierwszymi zajęciami, na których następuje
wybór tematów. Możliwe jest uzgodnienie z wykładowcą podjęcia tematu zaproponowanego
z zewnątrz. Jeśli tylko charakter projektu na to pozwala to jego wynik jest po zakończenie
projektu dostępny do prezentacji poprzez stronę internetową przedmiotu.
Warunki zaliczenia
Zaliczenie wykładu uzyskuje się na podstawie zaliczenia dwóch testów – w połowie
semestru i na koniec semestru. Testy są przeprowadzane z wykorzystaniem Internetu i
platformy zdalnej edukacji. Do zaliczenia wykładu niezbędna jest ocena pozytywna z
każdego z testów. Oceny z testów można poprawiać u wykładowcy na konsultacjach.
Zaliczenie projektu uzyskuje się na podstawie pozytywnej oceny pracy w trakcie semestru
i zaprezentowania wykonanego zadania projektowego wraz z jego obroną. Opiekun projektu
określa wymaganą częstotliwość konsultacji w trakcie wykonywania projektu.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: Programowanie obliczeń komputerowych, Programowanie
obiektowe, Systemy operacyjne, Bazy danych.
Literatura podstawowa
1. J.F. Kurose, K.W. Ross, „Sieci komputerowe. Od ogółu do szczegółu z Internetem w tle”,
Helion, Gliwice, 2006.
2. D.E. Comer, „Sieci komputerowe i intersieci”, WNT, Warszawa, 2003.
3. M. Hall, L. Brown, „Serwisy internetowe. Programowanie”, Helion, Gliwice, 2003.
4. L. Welling, L. Thomson, „PHP i MySQL. Tworzenie stron WWW. Vademecum
profesjonalisty”, Helion, Gliwice, 2005.
5. http://www.w3c.org.
Literatura uzupełniająca
1. A.S. Tanenbaum, „Sieci komputerowe”, Helion, Gliwice, 2004.
2. N.C. Zakas, J. McPeak, J. Fawcett, „Ajax”, Helion, Gliwice, 2007.
3. J. Liberty, D. Hurwitz, „ASP.NET. Programowanie”, Helion, Gliwice, 2006.
4. S. Graham, S. Simeonov, et al., „Java. Usługi WWW. Vademecum profesjonalisty”,
Helion, Gliwice, 2003.
5. N. McFarlane, P. Wilton, et al., „JavaScript. Zaawansowane programowanie”, Helion,
Gliwice, 2003.
INTERNET TECHNOLOGIES
Objective
Main objective of the course is to acquaint students with the issues of programming
Internet services and efficient usage of Internet systems, servers and services. One of the basic
81
element of the course is the technology of building and using distributed databases with
Internet client access. The course includes the review of basic information concerning
computer networks as platform for implementing internet services.
Description
The course concerns the following basic as well as advanced concepts from the field of
Internet technologies and building Internet applications: internetworks functioning basics,
TCP/IP layered model of computer network, Internte protocols, HTTP protocol and WWW
systems architecture; dynamic and distributed elements of WWW systems operation,
JavaScript, Java and Ajax technologies; security of Internet systems and services; e-learning.
Special attention is paid to the concept and implementation related issues concerning Internet
databases, with respect to the LAMP set of tools/platforms: Linux, Apache, MySQL and PHP.
The course includes information on ASP.NET platform and related programming languages
and methods. The elements of presentation Flash technology and Action Script language are
also include in the course.
Keywords
Internet services; internet protocols; internet applications; internet databases; e-learning;
security in internet systems and services; virtual laboratories; tele-laboratories; networked
computer systems; contents management systems; distributed network applications.

82
Program studiów I-ego stopnia na kierunku automatyka i robotyka
DYNAMIKA PROCESÓW
Przedmiot obowiązkowy
Prowadzący Prof. dr hab. inż. Mieczysław Metzger
(mieczyslaw.metzger@polsl.pl)
Rozkład Semestr
5
6
W
2
–
Ćw
1
–
Lab
–
1
Proj
–
–
Sem
–
–
Egz
E
–
ECTS
5
2
Cel
Celem przedmiotu jest nauczenie studentów analizy dynamiki procesów
traktowanych jako obiekty regulacji i sterowania. Istotne jest nauczenie
wyboru wielkości sterujących i sterowanych oraz analiza wpływu parametrów
procesowych na parametry systemowe rzeczywistych obiektów sterowania. W
obecnym programie studiów jest to również jedyny kontakt z inżynierską
wiedzą związaną z zagadnieniami termodynamiki oraz inżynierii procesowej
pozwalającą na przejście od rzeczywistego obiektu automatyki do opisu
matematycznego powszechnie stosowanego na kierunku.
Opis Ze
względu na olbrzymi materiał, jaki jest zawarty w literaturze, zakres
przedmiotu obejmuje specjalnie wyselekcjonowane, na podstawie wieloletniej
praktyki, wiadomości i umiejętności wystarczające do analizy dynamiki
procesów. Program obejmuje większość procesów mogących podlegać
automatyzacji. Procesy gromadzenia i przepływu masy. Procesy cieplne.
Procesy chemiczne. Procesy biologiczne. Procesy traktowane jako układy o
parametrach skupionych oraz rozłożonych. Analiza dynamiki procesów na
podstawie transmitancji operatorowych. Cybernetyka procesowa - analiza
fizykalnych sprzężeń zwrotnych. Wybór wielkości sterujących. Zmiany
parametrów fizykalnych procesu dla polepszenia możliwości sterowania nim.
Słowa
kluczowe
Proces jako obiekt automatyzacji, dynamika procesów, cybernetyka
procesowa, wybór wielkości regulacyjnych, procesy przepływowe, procesy
cieplne, procesy chemiczne, procesy biologiczne.
Wykład
Bilansowanie jako podstawa syntezy modeli matematycznych procesów. Bilanse w skali
makro – układy o parametrach skupionych. Paradygmat idealnego mieszania. Bilanse
infitezymalne – układy o parametrach rozłożonych. Paradygmat przepływu tłokowego.
Dyfuzja. Ogólne bilanse objętości, masy substancji, energii cieplnej, energii mechanicznej.
Podstawowe składniki bilansów. Jednostki. Metody rachunkowe dla układów ze sprzężeniem
zwrotnym. Analiza dynamiki w ujęciu cybernetycznym.
Procesy przepływu i gromadzenia objętości i masy. Zbiorniki ze zmiennym poziomem.
Zbiorniki z przelewem. Swobodny wypływ przez zawór. Wypływ wymuszony. Ujęcie
cybernetyczne. Samoregulacja. Wybór wielkości sterujących i sterowanych. Zależność
parametrów systemowych od parametrów procesowych. Możliwości ułatwienia sterowania.
Wpływ samoregulacji na własności regulacyjne procesu. Prosta regulacja poziomu. Uchyb
statyczny i możliwości jego likwidacji. Systemy wielu zbiorników.
Procesy przepływu i gromadzenia substancji. Mieszalniki. Reaktory chemiczne i
biologiczne. Kinetyka reakcji według Arrchenniusa, Michelsena-Mentena, Monoda,
Contoise’a. Analiza sprzężeń zwrotnych. Samoregulacja w reaktorach. Wybór wielkości
sterujących i sterowanych. zalężność parametrów systemowych od parametrów procesowych.

83
Możliwości ułatwienia sterowania. Wpływ samoregulacji na własności regulacyjne
procesu.Jednoczesne zmiany poziomu i stężenia. Kaskada mieszalników i reaktorów.
Układy z przepływem i gromadzeniem energii. Entalpia i energia. Jednostki. Bilanse
energii. Prawo Newtona, Prawo Fouriera. Wymienniki ciepła bezprzeponowe. Wymienniki
ciepła przeponowe. Analiza dynamiki obiektów cieplnych w ujęciu cybernetycznym. Układy
z jednoczesną zmianą poziomu i temperatury. Wybór wielkości sterujących i sterowanych.
Zależność parametrów systemowych od procesowych. Możliwości ułatwienia sterowania.
Wpływ samoregulacji na własności regulacyjne procesu.
Nieizotermiczny reaktor chemiczny z reakcją egzotermiczną i chłodzeniem z
wykorzystaniem płaszcza. Stabilność reaktora. Analiza dynamiki w ujęciu cybernetycznym.
Układy o parametrach rozłożonych. Równania stanu z pochodnymi przestrzennymi.
Warunki początkowe i brzegowe. Teoretyczne warunki Dirichleta i Neumanna. Inżynierskie
warunki Dankwerthsa. Proste metody wyprowadzenia transmitancji dla zlinearyzowanych RR
cząstkowych. Zjawiska przepływu. Rozwiązanie równania przepływu. Fizykalna geneza
opóźnienia transportowego. Procesy z dyfuzją i przewodzeniem. Biofilm. Biofiltr.
Perspektywy nowej technologii mikroprocesów (objętości zbiorników i kanalików w
mikrolitrach). Mikroprocesy jako technologia oferująca wysoką wydajnośc. Obecne już na
rynku technologie “Microfluidic” i “Lab-on-a chip”. Czy mikroprocesy zdominują procesy
przemysłowe i w jakich ewentualnie dziedzinach. Analiza dynamiki mikroprocesów. Wybór
wielkości sterujących i sterowanych. Zależność parametrów systemowych od parametrów
procesowych. Możliwości ułatwienia sterowania. Wpływ samoregulacji na własności
regulacyjne mikroprocesów.
Ćwiczenia tablicowe
1. Zasady tworzenia bilansów masowych i energetycznych dla prostych nieliniowych
obiektów dynamicznych o stałych skupionych (obiekty hydrauliczne, stężeniowe i
cieplne). Wykorzystanie praw: zachowania masy całkowitej, masy składnika, energii.
Wyznaczanie stanu ustalonego dla nieliniowych obiektów dynamicznych o stałych
skupionych.
2. Linearyzacja nieliniowych obiektów dynamicznych o stałych skupionych. Pojęcie analizy
przyrostowej wokół określonego punktu pracy. Ustalanie wartości macierzy A, B, C, D dla
liniowej aproksymacji procesu nieliniowego. Wykazanie zależności pomiędzy wartościami
elementów tych macierzy a wartościami wielkości fizykalnych.
3. Wykorzystanie transformacji Laplace’a dla modeli procesów po linearyzacji. Tworzenie i
przekształcanie schematów blokowych dla konkretnych modeli procesów. Wyznaczanie
funkcji przejścia ze schematu blokowego lub z równań modelu zlinearyzowanego z
wykorzystaniem zasady superpozycji. Wyznaczanie charakterystyk statycznych i
dynamicznych. Wykazanie zależności pomiędzy parametrami charakterystyki dynamicznej
(stała czasowa, wzmocnienie) a fizykalnymi parametrami obiektu w punkcie pracy
(przepływ objętościowy, stężenia lub temperatury wlotowe, objętość zbiornika, poziom
cieczy w zbiorniku). Analiza procesu jako obiektu automatyki.
4. Zasady tworzenia modeli nieliniowych dla bardziej złożonych obiektów dynamicznych o
stałych skupionych, np. dla mieszalnika ze zmiennym poziomem, prostego reaktora
chemicznego itp.
5. Podstawowe wiadomości na temat układów o parametrach rozłożonych. Wpływ braku
idealnego mieszania na dynamikę układów o parametrach rozłożonych. Sens fizyczny
uzależnienia wartości zmiennych stanu od czasu i od zmiennej przestrzennej.
6. Omówienie sposobu wyprowadzania nieliniowego modelu dla układu o parametrach
rozłożonych w oparciu o bilansowanie masy lub energii w elementarnym wycinku komory
aparatu. Wyznaczanie profili zmiennych stanu w stanie ustalonym.

84
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Zajęcia laboratoryjne
1. Procesy pneumatyczne
Esperymentalne badania dynamiki procesów pneumatycznych. Do dyspozycji są trzy
zbiorniki pneumatyczne o różnej objętości, linia pneumatyczna oraz zbiornik pneumatyczny
o zmiennej objętości (czasza siłownika pneumatycznego). Studenci mogą łączyć w dowolny
sposób elementy przewodami. Do dyspozycji są zadajniki wymyszenia skokowego oraz
sinusoidalnego (przetwornik elektro pneumatyczny sterowany komputerowo). Przebiegi
dynamiczne są rejestrowane komputerowo na podstawie pomiarów ciśnienia.
14. 2. Procesy hydrauliczne
Nowe stanowisko (zbudowane dla potrzeb badawczych w 2007 roku) umożliwia badania
różnych struktur układów hydraulicznych dwuzbiornikowych. Zbiorniki zostały tak
zaprojektowane aby architektura połączeń uwzględniała systemy obciążające się i
nieobciążające się. Zbiorniki w ich części nieliniowej (silnie zmienna powierzchnia lustra
wody) pozwalają na ponad stukrotną zmianę stałej czasowej co jest silnym wyzwaniem dla
regulacji. Instalacja pozwala na podłączenie wielu komputerów poprzez Simatic S7-300.
3. Wymienniki ciepła
Ćwiczenia są prowadzone na instalacji pilotażowej, w której występują trzy przemysłowe
wymienniki ciepła różnego typu oraz dwa elektryczne piece grzewcze.W zależności od planu
dla danej grupy roboczej można wykorzystać różne układy badawcze. W sali laboratoryjnej
jest pięć komputerów z systemami SCADA.
4. Procesy stężeniowe pH
Ćwiczenia są prowadzone na nowej instalacji neutralizacji z reaktorem mieszalnikowym
dwuzbiornikowym. System sterowania uwzględnia trzy pompy dozujące tłokowe oraz jedną
pompę perystaltyczną (wszystkie z osobnym inteligentnym sterowaniem). Przy instalacji jest
pięć komputerów z systemami SCADA co pozwala na równoczesną obserwację procesu i
kolejne wykonywanie eksperymentów.
5. Procesy cieplne ze spalaniem
Instalacja dydaktyczna spalania i nagrzewania zostala zmodernizowana w 2007 roku tak aby
mogła być sterowana i monitorowana przez nowy system rozproszony metsoDNA. Do
instalacji jest podpięty jeden procesor przemysłowy metsoDNA z dwoma switchami
przemysłowymi co pozwala na podłączenie wielu komputerów z systemami SCADA dla
monitoringu i sterowania procesem.
6. Układy o parametrach rozłożonych
Jest to jedyne ćwiczenie prowadzone na komputerach (aby realnie kontrolować przebieg
badań symulacyjnych prowadzący może nadzorować 6 grup roboczych danej sekcji
rozliczeniowej). Wykorzystanie własnego oprogramowania symulacji układów o parametrach
rozłożonych. Obecnie jest budowane stanowisko pilotażowego (unikatowego i
nieopanowanego technicznie mieszania on-line (bez reaktora mieszalnikowego) dla potrzeb
badawczych. Do 2009 roku proces powinien zostać opanowany dla potrzeb dydaktyki.
Wyposażenie laboratoryjne
Zajęcia prowadzone są na unikatowych stanowiskach laboratoryjnych – przy czym
większość z nich to pilotażowe instalacje półprzemysłowe wyposażone w profesjonalny
sprzęt automatyki. Sciślej to: stanowisko zbiorników i linii pneumatycznych; nowa (od 2008
roku) pilotażowa instalacja przepływowa z silnie nieliniowymi zbiornikami; pilotażowa sieć
cieplna; pilotazowy proces neutralizacji pH; zmodernizowana w 2007 roku instalacja spalania
i nagrzewania; proces mieszania w linii.
Metody nauczania
Ze względu na podstawowy charakter przedmiotu wykład prowadzony jest metodą
tradycyjną. Ćwiczenia tablicowe prowadzone są metodą tradycyjną, prowadzący formułuje
i rozwiązuje zadania. Laboratorium odbywa się w sekcjach rozliczeniowych (droga aparatura

85
unikatowa) ale występuje podział na kilka grup roboczych o indywidualnych zadaniach
badawczych, które muszą być oddzielnie umieszczone w sprawozdaniu sekcji. Wykorzystując
własną-switchowaną sieć Intranetu do każdego procesu jest podłączonych kilka (zazwyczaj
pięć) komputerów z gotowymi systemami SCADA dla prowadzenia badań w małych grupach
roboczych.
Dla studentów, którzy chcieliby dodatkowo przeprowadzić indywidualnie jakieś badania
zakład U
2
A deklaruje dzień otwarty wszystkich laboratoriów o unikatowym sprzęcie z opieką
prowadzących.
Warunki zaliczenia
Zaliczenie przedmiotu odbywa się na podstawie zaliczenia ćwiczeń tablicowych. Na
ćwiczeniach są dwa ostro oceniane sprawdziany oraz kolokwium zaliczeniowe. Egzamin
tylko pisemny. Osobne zaliczenie laboratorium na podstawie pisemnego zaliczenia
wszystkich ćwiczeń na sprawdzianach.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: fizyki płynów- gazów – energii oraz substancji, podstaw
matematycznych dynamiki układów w zakresie: Równania stanu. Punkt pracy procesu.
Linearyzacja dla małych przyrostów. Opis dynamiki na bazie transmitancji. Idea i praktyczne
stosowanie przekształceń operatorowych. Przekształcenie Laplace’a. Transformacja Z.
Charakterystyki amplitudowo-fazowe. Układy ze sprzężeniem zwrotnym. Metody
rachunkowe dla układów ze sprzężeniem zwrotnym.
Literatura podstawowa
1. Takahashi, Rabins, Auslander: Dynamika i Sterowanie, WNT, 1976 (pierwsze wydanie –
były dwa).
2. Luyben: Modelowanie, symulacja i sterowanie procesów przemysłowych, WNT, (1978)
(pierwsze wydanie – były dwa)
3. Metzger: Modelling, simulation and control of continuous processes, Wyd. Jacka
Skalmierskiego, 2000.
Literatura uzupełniająca
1. Prowadzący dysponuje pojedynczymi egzemplarzami większości najważniejszych książek
z dziedziny dynamiki procesów w języku angielskim (Luyben, Bequette, Franks, Friedly,
Ogunnaike, Himmelblau, Seborg itd.). Książki te są udostępniane na żądanie.
PROCESS DYNAMICS
Objective
The major purpose of the course is to present basic engineering methods for process dy-
namics analysis and its influence on process control.
Description
The area which is presented during two trimesters, deals with all the most important
problems in analysis of dynamic properties of industrial processes, treated as the control
objects. The course includes all the most important kinds of processes, such as for example,
flows and storing of materials, heating processes, chemical and biological processes. The
problems of stability and control from the cybernetic point of view are also discussed.
Keywords
Process dynamics; basic phenomenological models; dynamic properties analysis; phe-
nomenological feedback.

86
Program studiów I-ego stopnia na kierunku automatyka i robotyka
PODSTAWY ROBOTYKI
Przedmiot obowiązkowy
Prowadzący Dr hab. inż. Tadeusz Szkodny
(tadeusz.szkodny@polsl.pl)
Rozkład Semestr
5
6
W
2
–
Ćw
2
–
Lab
–
–1
Proj
–
–
Sem
–
–
Egz
–
E
ECTS
3
5
Cel Celem
wykładu jest zapoznanie słuchaczy z metodami opisu położenia
i orientacji brył sztywnych, kinematyki i dynamiki manipulatorów
stanowiących obiekt sterowania, planowania i sterowania ruchem oraz
sterowania pozycyjno-siłowego robotów. Przedstawiana jest także
charakterystyka języków programowania robotów. Omawiane manipulatory
mają co najwyżej trzy stopnie swobody i skupioną masę członów.
Opis
Charakterystyka podstawowych pojęć robotyki; ilustracja zbiorów opisujących
stan robota i zależności między nimi; postacie jednorodne wektora
związanego, swobodnego i układu współrzędnych; podstawowe
przekształcenia jednorodne; podprzestrzeń położeń i orientacji podstawowych
układów współrzędnych; schemat kinematyczny manipulatora; układy
współrzędnych manipulatora; zapis Hartenberga-Denavita; graf przekształceń
manipulatora i stanowiska; zadanie proste kinematyki manipulatora; metody
rozwiązań zadania odwrotnego kinematyki; kalibracja parametrów kinematyki
manipulatora; czynniki przyśpieszające obliczenia komputerowe zadań
odwrotnych kinematyki; prędkości i siły statyczne; równania dynamiki;
symulacja dynamiki; efektywność obliczeniowa dynamiki; generacja
trajektorii; charakterystyka mechaniczna manipulatorów; struktura sterownika
robota przemysłowego; układy sterowania pozycyjnego; warunki poprawnej
szybkości obliczeń w układach sterowania; układy sterowania pozycjno-
siłowe; języki programowania robotów; systemy programowania
autonomicznego off-line robotów.
Słowa
kluczowe
Robotyka; kinematyka manipulatorów; dynamika manipulatorów; planowanie
ruchu; generacja trajektorii; sterowanie robotów; programowanie robotów.
Wykład
Wprowadzenie, zasady zdania egzaminu, charakterystyka programu wykładu,
charakterystyka podstawowych pojęć robotyki, ilustracja zbiorów opisujących stan robota i
zależności między nimi.
Opis przestrzenny i przekształcenia. Postacie jednorodne: wektora związanego i
swobodnego, układu współrzędnych; przekształcenia podstawowe, przekształcenia złożone:
względność przekształceń i przekształcenie odwrotne, współrzędne kątowe, podprzestrzenie
położeń i orientacji podstawowych układów współrzędnych.
Kinematyka manipulatorów. Schemat kinematyczny, zapis Hartenberga-Denavita, układy
współrzędnych manipulatora, graf przekształceń manipulatora i stanowiska, zadanie proste
kinematyki manipulatorów.
Zadanie odwrotne kinematyki manipulatorów. Metody rozwiązań zadania odwrotnego
kinematyki, równania kluczowe manipulatora i ich interpretacja, powtarzalność i dokładność

87
manipulatora, kalibracja parametrów kinematyki manipulatora, czynniki przyśpieszające
obliczenia komputerowe zadań odwrotnych kinematyki.
Prędkości i siły statyczne. Jakobiany i ich interpretacja, siły statyczne manipulatorów,
przekształcenia prędkości i sił statycznych manipulatorów, osobliwości manipulatorów i ich
konsekwencje dla rozwiązań zadania odwrotnego kinematyki, prędkości i sił statycznych
manipulatorów.
Dynamika manipulatorów. Równania Newtona-Eulera, równania Lagrange’a dla
manipulatorów, postać jawna równań dynamiki, równanie dynamiki w przestrzeni stanu z
jawnymi i niejawnymi siłami Coriolisa, modele tarcia suchego i lepkiego, symulacja
dynamiki manipulatorów-problem doboru kroku dyskretyzacji czasu, efektywność
obliczeniowa dynamiki.
Generacja trajektorii. Charakterestyka opisu i generacji trajektorii zadanej, interpolacja
trajektorii zadanej w przestrzeni wewnętrznej manipulatora, interpolacja trajektorii zadanej w
przestrzeni zewnętrznej manipulatora, algorytmy generacji trajektorii zadanej z
zastosowaniem aproksymacji w przestrzeni wewnętrznej i zewnętrznej manipulatora.
Charakterystyka manipulatorów. Charakterystyka chwytaków, liczba stopni swobody,
dopuszczalny ciężar obiektu manipulacji, mobilność, opis przestrzeni roboczych, wskaźniki
charakterystyki kinematycznej i dynamicznej manipulatorów.
Struktura układów sterowania manipulatorami. Układ sterowania w pojedynczym członem,
współczynnik tłumienia, częstotliwość drgań swobodnych i tłumionych, podstawowe
wymagania dla układów sterowania manipulatorów, struktura układów sterowania
manipulatorów, warunki poprawnej szybkości obliczeń w układach sterowania.
Manipulatory z regulowaną siłą. Więzy naturalne i sztuczne zadań ograniczonych,
uogólniona powierzchnia więzów, układ współrzędnych więzów, manipulatory z bierną
podatnością mechaniczną, manipulatory z podatnością układową, układy sterowania
hybrydowego pozycją/siłą.
Języki programowania robotów. Programowanie robota przez uczenie, języki
bezpośredniego programowania, języki programowania na poziomie zadań, wymagania
stawiane językom programowania.
Systemy programowania autonomicznego off-line robotów. Charakterystyka systemu
programowania autonomicznego off-line.
Ćwiczenia tablicowe
1. Postacie jednorodne wektorów swobodnych, zwiazanych, układów współrzędnych, i
płaszczyzn.
2. Postacie jednorodne przekształceń podstawowych. Obliczanie parametrów przekształceń.
Przekształcenia złożone i ich interpretacja geometryczna. Względność przekształceń.
Przekształcenia odwrotne.
3. Układy współrzednych kątowych ustalonych i bieżącących. Przekształcenia jednorodne
opisane za pomocą układów x-y-z oraz z-y-z współrzędnych bieżących. Przekształcenia
jednorodne podstawowych układów współrzędnych (kartezjańskich, cylindrycznych,
sferycznych).
4. Podprzestrzenie kartezjańskie, cylindryczne i sferyczne położeń i orientacji. Obliczanie
współrzędnych: kartezjańskich, cylindrycznych, sferycznych kątowych bieżących z-y-z
oraz x-y-z.
5. Kinematyka manipulatorów PPP, OPP.
6. Kinematyka manipulatorów OOP, OOO.
7. Zadanie odwrotne kinematyki manipulatora OPP.
8. Zadanie odwrotne kinematyki manipulatora OOO.
9. Prędkości zewnętrzne manipulatora OOO.
10. Prędkości współrzędnych naturalnych.

88
Program studiów I-ego stopnia na kierunku automatyka i robotyka
11. Siły statyczne manipulatora OOO.
12. Dynamika manipulatora OOO.
13. Algorytm iteracyjny wyznaczania sił i momentów reakcji członów.
14. Równania dynamiki manipulatorów w przestrzeni stanów.
15. Układy SISO sterowania manipulatora OOO.
16. Układy MIMO sterowania manipulatora OOO.
Zajęcia laboratoryjne
1. Język programowania robota przemysłowego IRb-6.
2. Programowanie przykładowych zadań robota przemysłowego IRb-6.
3. Język programowania robota przemysłowego ROBIX.
4. Język programowania robota przemysłowego PR-02.
5. Język programowania robota edukacyjno-przemysłowego L-1.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w roboty: IRb-6, PR-02, Robix i L-1. Każdy z tych robotów
posiada własny język programowania, umożliwiajacy programowanie ruchu w przestrzeni
zewnętrznej.
Metody nauczania
Wykład jest prowadzony tradycyjnie. Na pierwszym wykładzie słuchacze prowadzeni są
do laboratorium celem zapoznania się z budową rzeczywistego robota. W trakcie wykładów
pokazywane są artykuły ilustrujące wybrane zagadnienia.
Ćwiczenia tablicowe prowadzone są metodą tradycyjną, prowadzący formułuje
i rozwiązuje zadania. Fragmenty rozwiązań zadań zawierających schematy blokowe
algorytmów rozwiązywania zadań odwrotnych kinematyki są przekazywane studentom w
postaci wydruków komputerowych. Również w takiej postaci studenci otrzymują fragmenty
rozwiązań zadań dotyczących sił i momentów reakcji członów.
Laboratorium odbywa się w
sekcjach 6-8 osobowych. Studenci poznają języki
peorgamowania robotów i opracowywują programy przykładowych operacji.
Warunki zaliczenia
Warunkiem zaliczenia wykładów jest obecność na nich. W przypadku 3 nieobecności
nieusprawiedliwionych student nie otrzymuje zaliczenia wykładu.
Warunkiem zaliczenia ćwiczeń tablicowych jest uzyskanie 13 i więcej punktów za 5
sprawdzianów bieżących, ocenianych w skali 0-5 punktów. Osoby które pisały wszystkie
sprawdziany i nie uzyskały zaliczenia, mogą zdawać jeden raz pisemne kolokwium
dodatkowe. Kolokwium (5 zadań) ocenia się wg skali 0
÷ 25 punktów. Zaliczenie uzyskuje
się, gdy suma za sprawdziany i kolokwium wynosi 26 i więcej punktów.
Warunkiem zaliczenia laboratorium student uzyskuje na podstawie pozytywnych ocen z
kompletu zaliczonych ćwiczeń, złożonych w teczce opisanej według wzoru jak w gablocie.
Na egzaminie pisemnym studenci rozwiązują 3 zadania o tematyce podobnej jak na
ćwiczeniach tablicowych i wykładach oraz odpowiadają na trzy pytania z teorii. Zadania i
pytania są oceniane w skali od 0 do 5 punktów. Pozytywna ocena pytań z teorii jest
warunkiem koniecznym zdania egzaminu. Zaliczenie ćwiczeń tablicowych na ocenę
przynajmniej 4.5 zwalnia z pisania zadań. Pozytywna ocena z pytań i zadań jest warunkiem
zdania egzaminu.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: fizyki (równania ruchu układu masa-sprężyna z uwzględnieniem
tarcia lepkiego), mechaniki (opis ruchu złożonego przestrzennego ciał i układów
mechanicznych typu łańcuchy kinematyczne szeregowe otwarte za pomocą macierzy
przekształceń jednorodnych z zastosowaniem wersji zapisu Hartenberga Denavita jak w

89
podręczniku A. Morecki, J. Knapczyk, K. Kędzior „Teoria mechanizmów i manipulatorów”
WNT Warszawa 2002, opis dynamiki ciał doskonale sztywnych z pomocą macierzy
przekształceń jednorodnych, zasada prac przygotowanych, wyznaczanie minimalnych
częstotliwości rezonansowych drgań układów mechanicznych typu łańcuchy kinematyczne
szeregowe otwarte), elektrotechnika i elektromechanika (zasada działania i model
matematyczny silnka prądu stałego sterowanego twornikowo z magnesami trwałymi, zasada
działania silnika prądu zmiennego synchronicznego BLDC z elektroniczną komutacją
uzwojeń stojana i pomiarem kąta obrotu wirnika), równania różniczkowe (rozwiązywanie
rónań różniczkowych zwyczajnych ).
Literatura podstawowa
1. Craig J.,J.: Wprowadzenie do robotyki. WNT Warszawa 1993.
2. Kozłowski K., Dutkiewicz P., Wróblewski W.: Modelowanie i sterowanie robotów. PWN,
Warszawa 2003.
3. Yoshikawa T. Foundations of Robotics-Analysis and Control. MIT Press 1990.
4. Morecki A., Knapczyk J.: Podstawy Robotyki. WNT Warszawa 1993.
5. Jezierski E.: Dynamika robotów. WNT Warszawa 2006.
Literatura uzupełniająca
1. Niederliński A.: Roboty Przemysłowe. Wyd. Szk. i Pedag. Warszawa 1981.
2. Olszewski M., Barczyk J.:Manipulatory i Roboty Przemysłowe. WNT Warszawa 1985.
3. Szkodny T. Modelowanie i symulacja ruchu manipulatorów robotów przemysłowych.
Wyd. Pol. Śl. Z. N. s. Automatyka, nr. 140, Gliwice, 2004.
4. Khalil W., Dombre E.: Modelling, Identification &Control of Robots. HPS. London 2002.
FOUNDATIONS OF ROBOTICS
Objective
This lecture is to present the methods of position and orientation spatial decription of rigid
bodies kinematics and dynamics of manipulators, which are control plants. The lecture gives a
methods of trajectory planning, position control, force control and hybrid control. Except this
lectures gives survey of robot languages programming. Cosidered manipulators have number
of degree of freedom not greater than 3.
Description
Characteristic of basic problems of robotics; illustration of sets describing robot states and
dependence among these sets; homogeneous transform, homogeneous form of: free and
connected vectors, frames; kinematic scheme of manipulator; frames of manipulator;
Hartenberg-Denavit notation; transform grafs of manipulator and work station; the forward
problem kinematics of manipulator; metods of solving the inverse problem kinematics of
manipulator; kalibration of manipulator kinematic parameters; computational factors
accelerating the solving of the inverse problem kinematics; velocities and static forces of
manipulator; dynamic equations; dynamic simulation; computational efficience of dynamics;
trajectory generation; mechanical characteristic of manipulator; architecture of an industrial
robot controller; position control; desired velocities of computations for robot control;
position-force robot control; robot languages programming; off-line system programming.
Keywords
Robotics; kinematics of manipulators; dynamics of manipulators; trajectory planning;
generation of trajectories; robot controls; programming of robots.Zautomatyzowane systemy
wytwarzania

90
Program studiów I-ego stopnia na kierunku automatyka i robotyka
MIERNICTWO PRZEMYSŁOWE
Przedmiot podstawowy
Prowadzący Prof. dr hab. inż. Jerzy Frączek
(jerzy.fraczek@polsl.pl)
Rozkład Semestr
5
6
W
2
–
Ćw
–
–
Lab
–
2
Proj
–
–
Sem
–
–
Egz
–
–
ECTS
2
2
Cel
Celem przedmiotu jest zaznajomienie z czujnikami, przetwornikami i ich
systemami do pomiaru przemysłowych wielkości nieelektrycznych.
Zaznajomienie obejmuje: budowę czujników; układy pomiarowe oraz
konstrukcje uwzględniające wymogi metrologiczne, niezawodnościowe oraz
przeciwwybuchowe; systemy uniwersalne pomiarów zautomatyzowanych;
zasady budowy przetworników inteligentnych oraz ich wykorzystanie w
systemach hierarchicznych z magistralami obiektowymi.
Opis
Czujniki i przetworniki pomiarowe we współczesnych systemach
pomiarowych; przetworniki „inteligentne”. Technologie: konwencjonalne,
grubowarstwowe, cienkowarstwowe i półprzewodnikowe. Pomiary wielkości
mechanicznych; tensometria. Pomiary strumienia masy i objętości; metody
korelacyjne. Pomiary składu chemicznego gazów i cieczy, w tym:
wyspecjalizowane metody chromatograficzne (GC); analiza w podczerwieni
(NDIR); spektrometria; jonometria wieloskładnikowa (ISFET, CHEMFET);
elektrokonduktometria wieloelektrodowa i bezelektrodowa. Pomiary
temperatury: Międzynarodowa Skala Temperatur (MST-90); czujniki
rezystancyjne i termoelektryczne; pirometry optyczne. Pomiary izotopowe:
promieniowanie jądrowe (
α,β,γ); detektory promieniowania jądrowego;
układy i systemy przemysłowe. Przetworniki „inteligentne” w systemach
hierarchicznych z magistralami obiektowymi; problemy: metrologiczne,
niezawodnościowe, przeciwwybuchowe oraz kompatybilności
elektromagnetycznej (EMC). Rozproszone systemy pomiarowe ze
standardami: Profibus (DP, PAS, FMS), Foundation Fieldbus, Modbus, CAN,
FIP, LonWorks, IEEE1451.
Słowa
kluczowe
Miernictwo wielkości nieelektrycznych; miernictwo przemysłowe; pomiary
wielkości mechanicznych; pomiary temperatury; pomiary składu
chemicznego; pomiary fizykochemiczne; pomiary izotopowe; rozproszone
systemy pomiarowe; magistrale obiektowe; protokoły komunikacyjne.
Wykład
1. Czujniki i przetworniki pomiarowe we współczesnych systemach hierarchicznych z
magistralami obiektowymi (wprowadzenie). Technologie czujników: konwencjonalne,
grubowarstwowe, cienkowarstwowe i półprzewodnikowe. Przetwornik „inteligentny”;
problemy metrologiczne, niezawodnościowe, przeciwwybuchowe oraz kompatybilności
elektromagnetycznej (EMC).
2. Pomiar strumienia masy i strumienia objętości: metoda zwężkowa; zasady normalizacji
metody; model pomiaru dla przetwornika inteligentnego; ocena niepewności pomiaru.
SMART FAMILY.
3. Pomiary przepływu cieczy z wykorzystaniem przepływomierzy: rotametrycznych,
elektromagnetycznych, turbinowych, ultradźwiękowych, korelacyjne, Vortex i Coriolisa;

91
normalizacja, układy pomiarowe, automatyzacja pomiarów.
4. Czujniki i przetworniki do pomiarów mechanicznych: tensometry (drutowe, foliowe i
półprzewodnikowe); indukcyjnościowe, transformatorowe i magnetoelastyczne;
uniwersalne układy i systemy pomiarowe zautomatyzowane..
5. Uniwersalne systemy analizatorów gazów: termokonduktometryczne; magnetomecha-
niczne i termomagnetyczne, cyrkonowe; układy pomiarowe zmikroprocesorowane;
pobieranie i przygotowanie próbek do analizy.
6. Analizatory z pochłanianiem promieniowania elektromagnetycznego; pochłanianie w
zakresie widma podczerwonego (NDIR): z detektorem selektywnym i nieselektywnym;
automatyzacja analizatorów wieloskładnikowych.
7. Chromatografia gazowa (GC): kolumny chromatograficzne; detektory; identyfikacja
chromatogramu dla potrzeb analizy jakościowej i ilościowej; automatyzacja pomiaru.
8. Spektrometr masowy (MS): z polem magnetycznym oraz kwadrupolowy; widma
spektrometryczne i ich identyfikacja; połączenie analizy chromatograficznej ze
spktrometryczną (GCMS), automatyzacja pomiaru.
9. Pomiary fizykochemiczne: Pomiary aktywności jonów (pX, pH) elektrodami
jonoselektywnymi (ISFET, CHEMFET); zautomatyzowane układy do pomiarów
wieloskładnikowych. Analizatory elektrokonduktometryczne: wieloelektrodowe i
bezelektrodowe. Automatyzacja pomiarów.
10. Pomiary temperatury: skale temperatur; Międzynarodowa Skala Temperatur
(empiryczna); czujniki rezystancyjne: metalowe i półprzewodnikowe; czujniki
termoelektryczne; narmalizacja charakterystyk; automatyzacja pomiarów.
11. Termometry optyczne: monochromatyczne, całkowitego promieniowania i dwubarwne;
automatyczne układy pomiarowe.
12. Pomiary izotopowe: właściwości promieniowania
α, β i γ; detektory: licznik Geigera-
Müllera, komora jonizacyjna, licznik scyntylacyjny, detektory półprzewodnikowe;
automatyczne układy pomiarowe.
13. Rozproszone systemy pomiarowe: klasyfikacje, tory transmisji-budowa i właściwości,
przesyłanie informacji, problemy EMC.
14. Sieci pomiarowe w oparciu o typowe standardy: sieć Ethernet, Elhernet przemysłowy,
Standard Profibus (DP, PA, FMS), Fundation Fieldbus, Modbus, CAN, FIP, LonWorks.
15. Standard IEEE1451; standaryzacja oprogramowania i urządzeń; wykorzystanie w
uniwesalnych systemach pomiarowych z magistralami obiektowymi.
Zajęcia laboratoryjne
1. Wzorcowanie i sprawdzanie termometrów.
2. Pomiar temperatury gazu.
3. Przetworniki tensometryczne siły.
4. Iskrobezpieczny system pomiarowy.
5. Badanie chromatografu gazowego.
6. Pomiar stężenia jonów wodorowych pH.
7. Właściwości dynamiczne czujników pH-metrycznych
8. Pomiar strumienia objętości i strumienia masy gazu za pomocą zwężek.
9. Badanie przepływomierzy wody.
10. Pomiary absorpcji i rozproszenia; badanie detektorów.
11. Pomiary radiometryczne i dozymetryczne.
12. Akwizycja danych w systemie rozproszonym.
13. Sieć pomiarowa ze standardem PROFIBUS.
14. Wykorzystanie standardów CAN i IEEE1451.

92
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Wyposażenie laboratoryjne
Laboratorium wyposażone jest w nowoczesną aparaturę do pomiarów wielkości
nieelektrycznych, stanowiąc przykłady zautomatyzowanych (z wykorzystaniem komputerów)
pomiarów przemysłowych: chromatograf gazowy; stanowisk do pomiarów: strumienia objętości
i strumienia masy powietrza za pomocą zwężki znormalizowanej; wzorcowania
przepływomierzy wody; badań przetworników tensometrycznych siły; wzorcowania
termometrów; badań błędu pomiaru temperatury gazu w rurociągu; wyznaczania charakterystyk
statycznych pH-metru; badania właściwości dynamicznych ogniwa pH-metrycznego; z
wykorzystaniem iskrobezpiecznego systemu pomiarowego z magistralą obiektową. W
laboratorium wykorzystuje się specjalistyczne oprogramowanie Matlab oraz LabVIEW.
Wykorzystuje się sieć Ethernet oraz standardy: PROFIBUS oraz CAN.
Metody nauczania
Podczas wykładu udostępniane są prospekty nowych rozwiązań konstrukcyjnych oraz zasad
automatyzacji pomiarów przemysłowych. Specjalistyczne systemy pomiarowe ilustrowane są z
wykorzystaniem materiałów video. Także eksponowane są przykładowe czujniki i przetworniki
pomiarowe.
Na zajęciach laboratoryjnych studenci korzystają ze skrypów. Otrzymują materiały
uzupełniajace podczas zajęć. Zajęcia są prowadzone w sekcjach po trzy osoby. Opracowują
jedno sprawozdanie na sekcję.
Warunki zaliczenia
Zaliczenie wykładu - na podstawie testu pisemnego nas zakończenie wykładów.
Zaliczenie laboratorium - na podstawie zaliczenia wszystkich ćwiczeń laboratoryjnych.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: Fizyka, Elektrotechnika i elektromechanika, Podstawy
elektroniki, Podstawy automatyki, Podstawy miernictwa, Rachunek prawdopodobieństwa i
statystka matematyczna.
Literatura podstawowa
1. E. Romer, Miernictwo przemysłowe, PWN, Warszawa, 1978
2. P. H. Sydenham, Podręcznik metrologii, Tom II Podstawy praktyczne, WKiŁ, W-wa 1990.
3. Skrypt do laboratorium: Laboratorium miernictwa przemysłowego, praca zbiorowa pod red.
J. Frączka i S. Walusia, Skrypt Pol. Śląskiej, Gliwice 2002.
4. Laboratorium zintegrowanych czujników pomiarowych - praca zbiorowa. Skrypt nr 2055
Pol. Śląskiej, Gliwice 1997.
5. W. Mielczarek, Komputerowe systemy pomiarowe, Wyd. Pol. Śl., Gliwice 2002.
Literatura uzupełniająca
1. L. Michalski, K. Eckersdorf, Pomiary temperatury, WNT, Warszawa, 1986
2. M. Miłek, Pomiary wielkości nieelektrycznych metodami elektrycznymi, Wyd. Pol.
Zielonogórskiej, Zielona Góra 1998.
3. J. Piotrowski, K. Kostyrko, Wzorcowanie aparatury pomiarowej. PWN, Warszawa 2000.
4. S. Waluś, Przepływomierze ultradźwiękowe. Metodyka stosowania, Podręcznik akademicki,
Wyd. Pol. Śląskiej, Gliwice 1997.
5. J. Frączek, Aparatura przeciwwybuchowa w wykonaniu iskrobezpiecznym, Śląskie Wyd.
Techniczne, Katowice 1995.
INDUSTRIAL MEASUREMENTS
Objective
The aim of the subject is learning about sensors, transducers and measurement systems,
which are destined for measurement of nonelectrical industrial quantities. Technology of

93
sensors, principles of industrial measurement automation and principles of application of
fieldbuses in hierarchical systems are conceptioned in the program of lectures.
Description
Sensors: conventional, thick, thin and solid-state. Integrated and smart sensors in
hierarchical systems with fieldbuses, problems of electromagnetic compatibility (EMC).
Measurement of mechanical quantities: piezoresistive, inductive, LVDT and magnetoelastic
sensors and transducers; flow meters: with orifice plates, rotameters, electromagnetic, turbine,
calorimetric, ultrasonic (Doppler and cross-correlation), Vortex and Coriolis. Measurement of
chemical composition: Gas analysers: thermal conductivity, magnetomechanical,
thermomagnetic, zirconium oxide, infra-red (NDIR); gas sampling system. Gas
chromatography (GC). Mass spectrometry and its connection wth gas chromatography
(GCMS). Ion-selective measurements: pX and pH measurements; ISFET and CHEMFET
electrodes in multiparameter measurements. Contacting and electrodeless electrical
conductivity measurements. Temperature measurement: The International Temperature Scale
(empirical). Thermometers: resistance (coiled wire, thermistor, silicon sensor, thick and thin
film sensors), thermocouples, optical-thermal radiation (monochromatic, total emission, two-
colour). Isotopic measurements: nuclear radiation (α,β,γ); radiation laws; detectors: Geiger-
Müller counter, ionisation chamber, scintillation counter, semiconductor detectors; industrial
measurements. Distributed industrial measurement networks; LAN networks; Standards:
PROFIBUS, CAN, Foundation Fieldbus, FIP, LonWorks, IEEE1451.
Keywords
Metrology of nonelectrical quantities; industrial measurements; distributed measurements;
fieldbuses; electromagnetic compatibility (EMC).

94
Program studiów I-ego stopnia na kierunku automatyka i robotyka
ZAUTOMATYZOWANE SYSTEMY WYTWARZANIA
Przedmiot obowiązkowy
Prowadzący Dr
inż. Waldemar Grzechca
(waldemar.grzechca@polsl.pl)
Rozkład Semestr
5
6
W
2
–
Ćw
1
–
Lab
–
2
Proj
–
–
Sem
–
–
Egz
–
E
ECTS
2
4
Cel
Celem przedmiotu jest nauczenie studentów zagadnień związanych z
szeregowanie zadań w różnych strukturach maszyn (maszyna pojedyncza,
maszyny równoległe, struktura gniazdowa, system przepływowy). Druga część
wykładu obejmuje problemy balansowania linii montażowej. Celem tej części
jest zaznajomienie studenta z problemami projektowania nowych linii
montażowych oraz rebalansem struktur już istniejących. Celem przedmiotu
jest zapoznanie studentów zarówno z metodami dokładnymi jak i
heurystykami wykorzystywanymi w omawianych zagadnieniach.
Opis Pojęcia podstawowe; problem szeregowania zadań na pojedynczej maszynie,
reguły: LIFO, FIFO, SPT, LPT, EDD; metoda podziału i oszacowań dla
wyznaczenie minimalnej sumy spóźnień zadań na pojedynczej maszynie;
maszyny równoległe: zadania podzielne i niepodzielne; system przepływowy –
algorytm Johnsona i reguła Johnsona; system gniazdowy – heurystyczne
metody rozwiązywania konfliktów na maszynach, ocena jakości rozwiązania;
problem balansowania linii montażowej, algorytmy dokładne, algorytmy
heurystyczne, wyznaczanie minimalnej wartości cyklu i minimalnej liczby
stanowisk montażowych.
Słowa
kluczowe
Szeregowanie zadań; struktury systemów produkcyjnych; metody dokładne;
metody heurystyczne; balansowanie linii montażowej; algorytm genetyczny
Wykład
Tematy wykładów:
1. Pojęcia podstawowe, definicja systemu produkcyjnego, struktury systemów
produkcyjnych, wprowadzenie do zagadnień optymalizacji produkcji.
2. Maszyna pojedyncza, szeregowanie zadań wg reguł LIFO, FIFO, SPT, LPT, EDD.
3. Maszyny w systemie równoległym: zadania podzielne i niepodzielne; algorytm
McNaughtona i algorytmy listowe LPT, SPT, RPT.
4. Maszyny w systemie gniazdowym (JOB SHOP): metody rozwiązywania konfliktów
przydziału zleceń.
5. Maszyny w systemie przepływowym (FLOW SHOP): algorytm i reguła Johnsona.
6. Metoda podziału i oszacowań: zastosowanie w minimalizacji sumy spóźnień zadań
przydzielanych do pojedynczej maszyny.
7. Metoda ścieżki krytycznej w konstruowaniu systemów produkcyjnych.
8. Balansowanie linii montażowej: pojęcie linii, cykl produkcyjny, struktury linii, graf relacji
kolejnościowej, ocena efektywności linii.
9. Balansowanie linii montażowej: metody dokładne.
10. Balansowanie linii montażowej: metody heurystyczne.
11. Balansowanie linii montażowej: algorytm genetyczny.
12. Ocena jakości rozwiązanie balansu linii produkcyjnej.

95
13. Linia montażowa dwupozycyjna: opis, algorytm postępowania.
14. Linia montażowa w kształcie litery U: opis, metodyka postępowania.
15. Wstęp do złożonych systemów informatycznych zarządzających produkcją.
Ćwiczenia tablicowe
Ćwiczenia tablicowe obejmują pięć bloków tematycznych, podczas których student pod
nadzorem prowadzącego ćwiczenia stosuje poznane algorytmy rozwiązywania problemu:
1. Maszyny w systemie równoległym: zadania podzielne i niepodzielne.
2. System gniazdowy – heurystyki SPT, LPT, EDD, LWR, FIFO, LIFO.
3. System przepływowy
4. Maszyna pojedyncza – aplikacja metody podziału i oszacowań
5. Balansowanie linii montażowej – problem typu I i typu II
Zajęcia laboratoryjne
Prowadzone w oparciu o programy realizowane podczas prac dyplomowych, studenci
wykorzystują wiedzę zdobytą podczas wykładu i ćwiczeń tablicowych, cykl ćwiczeń
tablicowych składa się z 6 bloków tematycznych:
1. Maszyny w systemie równoległym.
2. Maszyny w systemie gniazdowym.
3. Maszyny w systemie przepływowym.
4. Maszyna pojedyncza.
5. Balansowanie linii montażowej – algorytmy heurystyczne i genetyczne.
6. Zintegrowany system informatyczny IFS.
W ramach zajęć laboratoryjnych organizowana jest 3 godzinna wycieczka do fabryki GM
OPEL lub FIAT gdzie studenci zapoznają się z rzeczywistą linią montażową.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 30 komputerów PC z oprogramowaniem
specjalistycznym (prace dyplomowe absolwentów). Podczas zajęć każdy z ćwiczących
rozwiązuje indywidualne zadania i problemy.
Metody nauczania
Wykład jest prowadzony częściowo w oparciu o prezentacje multimedialne, wzbogacony o
prezentacje wyników dedykowanych programów komputerowych.
Ćwiczenia tablicowe prowadzone są metodą tradycyjną, prowadzący formułuje
i rozwiązuje zadania, cześć zadań pozostaje do rozwiązania przez studentów.
Laboratorium odbywa się w sekcjach jednoosobowych. Studenci opracowują dane do
implementacji komputerowej i wykorzystując programy komputerowe dokonują obliczeń dla
licznych przykładów numerycznych.
Warunki zaliczenia
Wykład i ćwiczenia tablicowe zaliczane są po 5 semestrze na podstawie 5 kartkówek z
bloków tematycznych omawianych na zajęciach tablicowych.
Zajęcia laboratoryjne zaliczane są na podstawie zrealizowanych bloków tematycznych,
podstawą wystawienia oceny są odbyte wszystkie ćwiczenia laboratoryjne i pozytywne oceny
z oddanych raportów.
Egzamin po 6 semestrze obejmuje cześć pisemną, na którą składają się dwa zagadnienie
teoretyczne i 3 zadania do samodzielnego rozwiązania. Po części pisemnej odbywa się
egzamin ustny dotyczący zagadnień teoretycznych szeregowania zadań i balansu linii
montażowej.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: podstaw matematyki oraz podstaw programowania komputerów.
Przydatna również jest wiedza z przedmiotu metody obliczeniowe optymalizacji.

96
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Literatura podstawowa
1. Cz. Smutnicki: Algorytmy szeregowania, EXIT, 2002
2. J. Błażewicz, K.H. Ecker, G. Schmidt, J. Węglarz: Scheduling in Computer and
Manufacturing Systems, Springler Verlag 1994
3. T. Sawik: Optymalizacja dyskretna w elastycznych systemach produkcyjnych, WNT
Warszawa 1992
4. R. Knosala: Zastosowania metod sztucznej inteligencji w inżynierii produkcji, WNT
Warszawa 2002
5. M.Pawlak: Algorytmy ewolucyjne jako narzędzie harmonogramowania produkcji, WNT
Warszawa 1999
Literatura uzupełniająca
1. A. Scholl: Balancing and Sequencing of assembly Lines, Physica Verlag, 1999
2. K.R. Baker: Introduction to Sequencing and Scheduling, John Wiley & Sons, New York,
1974
3. M.Pinedo: Planning and Scheduling in Manufacturing and Services, Springer, 2005
4. M.Pinedo: Scheduling: Theory, Algorithms and Systems, Prentice Hall, New Jersey, 1995
COMPUTER INTEGRATED MANUFACTURING (CIM)
Objective
The major purpose of the course is to present basic methods of scheduling and sequencing
tasks in different manufacturing systems (single machine, parallel machines, flow shop, job
shop). The second goal is to present idea of balancing assembly lines to show exact and heu-
ristic methods which solve the assembly line balancing problem.
Description
Principle ideas of scheduling and sequencing tasks, methods for single machine (LIFO,
FIFO, SPT, LPT, EDD), parallel systems – minimizing mean flow time, minimizing schedule
length, flow system – Johnson algorithm and rule, Job Shop – basic ideas, assembly line –
description, cycle, line efficiency, different structures, exact and heuristic methods, genetic
algorithms in scheduling and balancing.
Keywords
Scheduling and sequencing tasks; single machine; parallel system; flow shop; job shop;
exact methods, heuristics, simple assembly line balancing problem; genetic algorithms.
97
PODSTAWY STEROWANIA ROBOTÓW
Przedmiot obowiązkowy
Prowadzący Dr
inż. Artur Babiarz, Dr inż. Krzysztof Jaskot
(artur.babiarz@polsl.pl, krzysztof.jaskot@polsl.pl)
Rozkład Semestr
6
W
1
Ćw
–
Lab
1
Proj
–
Sem
–
Egz
–
ECTS
2
Cel Celem
wykładu jest zapoznanie słuchaczy z zagadnieniami związanymi
z budową oraz sterowaniem robotów ze szczególnym uwzględnieniem doboru
napędu oraz budowy własnych układów sterowania wykorzystujących systemy
mikroprocesorowe. Wiedza nabyta w trakcie wykładów pozwala na
projektowanie prostych konstrukcji mechanicznych robotów, implementację
podstawowego oprogramowania sterującego robotami (język C),
projektowanie prostych układów sterowania wykorzystujących
mikroprocesory (Microchip, Atmel, Hitachi, Motorola) i układy sensoryczne
(Analog Devices, Freescale, Maxis, Texas Instruments).
Opis Pojęcia podstawowe: zasada działania żyroskopu, akcelerometru jedno
i wielososiowego, enkoderów absolutnych i inkrementalnych, sygnały
sterujące silnikami, rodzaje napędów robotów mobilnych – dwukołowych,
czterokołowych, sześciokołowych, rodzaje kół; układy sterowania
pojedyńczym serwomechanizmem, projektowanie napędów robotów
mobilnych, przekładnie, sterowanie silnikami DC/AC, modelowanie
matematyczne sterowania pozycyjno prędkościowego serwomechanizmów,
profile prędkości, sterowanie robotów mobilnych kołowych, roboty kroczące –
modele chodu ludzkiego i zwierzęcego, projektowanie systemów nawigacji
inercyjnej, protokoły transmisji radiowej.
Słowa
kluczowe
Enkodery; żyroskopy; akcelerometry; systemy nawigacji; roboty kroczące;
roboty mobilne kołowe; serwomechanizmy; silniki BLDC; procesory DSP;
komunikacja radiowa.
Wykład
1. Napędy, serwomechanizmy i sterowanie pozycyjno-prędkościowe: ogólna charakterystyka
napędu robota – serwonapędy, serwomechanizmy, dobór silników napędowych,
sterowanie silnikami prądu stałego, sterowanie silnikami krokowymi, sterowanie silnikami
trójfazowymi (BLDC), przekładnie planetarne, analiza podstawowych równań przekładni
planetarnych, kinematyka przekładni zębatych w układach napędowych robotów, ogólne
zasady analizy kinematycznej przekładni zębatych w układach napędowych robotów,
ogólna charakterystyka przekładni pasowych, przekładnie z pasami płaskimi, kinematyka
przekładni pasowej, przekładnie z pasem zębatym.
2. Metody przetwarzania informacji oraz metody lokalizacji obiektów, nawigacja: układy
PWM, komunikacja z układem sterowania – interfejsy: RS232, RS485, I2C, SPI, cyfrowa
realizacja regulatorów typu PI, PD, PID, układy zasilające, układy nawigacji inercyjnej –
żyroskopy, akcelerometry, zasada działania, enkodery absolutne i inkrementalne zasada
działania i sposób pozyskiwania informacji, dalmierze laserowe, ultradźwiękowe budowa i
działanie, stereowizja, systemy nawigacyjne GPS.
3. Planowanie i sterowanie ruchem robotów nieholonomicznych: typy kół, konfiguracja
robotów kołowych, kinematyka robotów mobilnych, roboty specjalne (np. inspekcyjne),

98
Program studiów I-ego stopnia na kierunku automatyka i robotyka
sterowanie grupą robotów mobilnych, wykorzystanie informacji wizyjnej w sterowaniu,
sterowanie na podstawie sygnałów pochodzących z układów sensorycznych.
4. Zaawansowane zagadnienia dotyczące sterowania robotów: systemy wielosensoryczne w
nawigacji robotów mobilnych, reprezentacje środowiska zewnętrznego – otoczenie robota,
dekompozycja przestrzeni zewnętrznej, języki programowania, wymogi i struktury
programów, modele i sterowanie robotami wieloprzegubowymi, stabilność robotów
kroczących, wzorce chodu.
Zajęcia laboratoryjne
1. Sterowanie serwomechanizmem opartym na silniku BLDC.
2. Wykorzystanie czujników do detekcji położenia.
3. Sterowanie serwomechanizmem opartym na silniku liniowym.
4. Algorytmy sterowania autonomicznym robotem mobilnym.
5. Stabilizacja ruchu robota kroczącego dwu i sześcionożnego.
Wyposażenie laboratoryjne
Laboratorium jest wypoasażone w sześć komputerów PC z zainstalowanymi środowiskami
uruchomieniowymi dla dedykowanych mikrokontrolerów. Stanowiska wyposażone są
dodatkowo w sprzętowe emulatory procesorów oraz programatory. W laboratorium ponadto
znajdują się roboty mobilne kołowe, roboty kroczące dwu i sześcionożne oraz stanowiska do
badania serwomechanizmów opartych na silnikach wykonawczych (BLDC/AC), sterowanika,
wzmacniacza mocy oraz układu pomiarowego.
Metody nauczania
Wykład jest ilustrowany slajdami, wzbogacony o prezentacje programów komputerowych
oraz pracy rzeczywistych obiektów.
Laboratorium odbywa się w sekcjach dwuosobowych. Studenci pracują na obiektach
rzeczywistych, dla których opracowywują algorytmy sterowania oraz dobierają odpowiednie
parametry układu sterowania.
Warunki zaliczenia
Student uzyskuje zaliczenie wykładu na podstawie pisemnego kolokwium składającego się
z co najmniej pięciu pytań opisowych. Zaliczenie z laboratorium uzyskuje się na podstawie
indywidualnego zaliczenia poszczególnych ćwiczeń.
Wstępne przygotowanie
Przedmiot skupia się na sterowaniu układami napędowymi robotów bez szczegółowego
analizowania zasady działania poszczególnych elementów napędu, w skład którego wchodzą:
silnik wykonawczy, mikrokontroler, układ sterowania. W związku z tym zakłada się, że przed
rozpoczęciem nauki niniejszego przedmiotu student posiada przygotowanie w zakresie:
zasady działania i programowania mikrokontrolerów, podstawowej wiedzy z dziedziny
mechaniki technicznej (mechanizmy: przekładnie zębate, przekładnie pasowe, obliczanie
przełożeń, sprawności, dynamika bryły sztywnej, ruch obrotowy bryły sztywnej, momenty
bezwładności, zjawisko żyroskopowe, elementy dynamiki analitycznej – równanie
Lagrange’a) , znajomości języków programowania (język C, C++), elektromechaniki.
Literatura podstawowa
1. Siegwart R., Nourbakhsh I., Introduction to autonomous mobile robots, MIT Press, 2004
2. Giergiel M., Hendzel Z., Żylski W., Modelowanie i sterowanie mobilnych robotów
kołowych, Wydawnictwo Naukowe PWN, 2002
3. Zielińska T., Maszyny kroczące, Wydawnictwo Naukowe PWN, 2003
4. Heimann B., Gerth W., Popp K., Mechatronika, komponenty, metody, przykłady.
Wydawnictwa Naukowe PWN, Warszawa 2001
5. Pietraszek St., Mikroprocesorowe jednoukładowe PIC, Helion 2002.

99
Literatura uzupełniająca
1. Praca zbiorowa pod red. M. Dietricha, Podstawy konstrukcji maszyn. Tom 3., WNT, 2006.
2. Praca zbiorowa pod red. E.Mazanka, Przykłady obliczeń z podstaw konstrukcji maszyn
Tom 2 Łożyska, sprzęgła i hamulce, przekładnie mechaniczne, WNT, 2005.
Inne uwagi
Przedmiot stanowi uzupełnienie wymogów stawianych w minimach programowych dla
kierunku Automatyka i Robotyka z przedmiotu Podstawy Robotyki.
FUNDAMENTALS OF ROBOT CONTROL
Objective
The aim of this course is acquaintance students with construction and control of robots.
The course puts emphasis on a choice robot drive and disign the own control systems. After
course students can design the simple mechanical robot construction, create control software,
design control system with microcontrolers (Microchip, Atmel, Hitachi, Motorola) and sensor
systems (Analog Devices, Freescale, Maxis, Texas Instruments).
Description
Basic concepts: principle of gyroscope and accelerometers operation, absolute and incre-
mental encoders, signals of motor control, types of mobile robots drive – two-wheel, four-
wheel, six-wheel, types of wheel; control of servo controller, design of mobile robots drive,
gears, AC/DC motor control, mathematical modeling of position and speed servomotor con-
trol, velocity profile, wheel mobile robot control, walking robots – human and animal patterns
walk, design inertial navigation systems, radio transmission protocol.
Keywords
The absolute and incremental encoders; gyroscopes; accelerometers; biped robots; mobile
robots; servo controllers; BLDC motors; DSP microcontrollers; radio communication; naviga-
tion systems.

100
Program studiów I-ego stopnia na kierunku automatyka i robotyka
SYMULACJA UKŁADÓW STEROWANIA
Przedmiot obowiązkowy
Prowadzący Prof. dr hab. inż. Mieczysław Metzger
(mieczyslaw.metzger@polsl.pl)
Rozkład Semestr
6
W
2
Ćw
–
Lab
1
Proj
–
Sem
–
Egz
–
ECTS
2
Cel
Celem przedmiotu jest nauczenie studentów umiejętności syntezy
symulatorów układów sterowania w czasie rzeczywistym dla potrzeb
projektowania i testowania układów automatyki
Opis Podstawowe
pojęcia modelowania i symulacji; testowanie układów
automatyki; środowisko programowania graficznego LabVIEW jako światowy
standard; cechy wyróżniające LabVIEW od innych produktów
informatycznych. język G; podstawowy kurs programowania graficznego;
zadajniki i wskaźniki; kontrola czasu obliczeń. podstawowe mechanizmy
programowania strukturalnego w G. możliwości sprzętowe; adaptacja metod
numerycznych dla potrzeb symulacji układów o parametrach skupionych i
rozłożonych; przykłady symulacji w czasie rzeczywistym układów regulacji i
sterowania.
Słowa
kluczowe
Symulacja w czasie rzeczywistym; LabVIEW; język G; symulacja układów
automatyki.
Wykład
Podstawowe pojęcia modelowania i symulacji. Testowanie układów automatyki.
Oprogramowania LabVIEW jako światowy standard dla syntezy instrumentów wirtualnych
(czyli w pełni funkcjnalnych urządzeń zrealizowanych na PC).
Podstawowy kurs języka G. Idea programowania graficznego. Język G jako narzędzie
nieustępujące jezykowi C/C++. Okna aplikacji (panele czołowe urządzeń oraz systemów
SCADA/HMI/MMI/GUI) oraz diagramu programu.
Programowanie graficznego panelu użytkownika. Omówienie implementacji gałek,
pokręteł, manipulatorów, przycisków oraz wskaźników i okien wykresów czasowych.
Wizualizacja trendów i alarmów. Dobór mechanicznej reakcji kontrolek.
Idea programowania graficznego za pomocą ikon. Tworzenie programu za pomocą
łączenia ikon. Idea i realizacja paradygmatu „data flow computing”.
Graficzna realizacja podstawowych struktur programowania (pętle, instrukcje warunkowe,
sekwencje itp.). Klastry. Zmienne lokalne i globalne.
Realizacja funkcji i podprogramów w języku G. Programowanie obiektowe w języku G.
Graficzne programowanie operacji z użyciem macierzy i wektorów. Realizacja operacji w
czasie rzeczywistym. Obliczenia w trybie “data flow computing”. Graficzny debugger.
Obsługa We/Wy w czasie rzeczywistym. Symulacja w czasie rzeczywistym.
Adaptacja podstawowych metod numerycznego całkowania RRZw i RRCz. oraz
analitycznych metod badania dynamiki procesów. Metody Eulera, RK2, RK4, AB2, ABM4
oraz metody linii.
Przystosowanie podstawowych zasad dyskretyzacji układów ciągłych z wykorzystaniem
przekształcenia Z dla syntezy regulatorów i symulatorów.
Przykłady symulacji w czasie rzeczywistym obiektów automatyki. Realizacja prostych
algorytmów regulacji i sterowania. Symulacja układów automatyki.

101
Zajęcia laboratoryjne
1. Synteza GUI, elementy animacji, powiązanie z programem w G.
2. Kontrola realizacji obliczeń i realizacja czasu rzeczywistego, synteza funkcji
i podprogramów.
3. Obsługa We/Wy analogowych i cyfrowych – prosty system SCADA.
4. Symulatory obiektów automatyki.
5. Synteza regulatorów P, PI, PID z ograniczeniem sygnału i zatrzymaniem całkowania.
6. Badania symulacyjne układów regulacji.
Wyposażenie laboratoryjne
Wykorzystanie sali wydziałowej – każdy student pracuje przy osobnym komputerze.
Metody nauczania
Wykład jest przygotowany w środowisku PowerPoint, wzbogacony o prezentacje
programów komputerowych w LabVIEW.
Laboratorium odbywa się w sekcjach rozliczeniowych przy czym jedno lub dwu osobowe
podsekcje robocze mają do dyspozycji osobny PC. Studenci opracowywują
i implementują.zadane programy.
Warunki zaliczenia
Zaliczenie przedmiotu na podstawie zaliczenia laboratorium. Zaliczenie laboratorium na
podstawie sprawdzianów z każdego ćwiczenia.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: programowania obliczeń komputerowych, metod numerycznych,
dynamiki układów, dynamiki procesów, podstaw automatyki.
Literatura podstawowa
1. Metzger: Modelling, simulation and control of continuous processes, Wyd. Jacka
Skalmierskiego, 2000.
2. LabVIEW- user manual.
Literatura uzupełniająca
Prowadzący dysponuje pojedyńczymi egzemplarzami większości najważniejszych
książek związanych z LabVIEW w języku angielskim (w tym obie pozycje Johnsona). Ksi-
ążki te są udostępniane na żądanie.
SIMULATION OF CONTROL SYSTEMS
Objective
The major purpose of the course is to present basic engineering methods of synthesis and
programming of real-time simulators of control systems.
Description
Basic notions of modelling and simulation. Testing of control systems. LabVIEW
environment as world-wide standard. G language. Basic course of graphical programming.
Controls and indicators. Control of execution time. Instrumentation possibilities. Adaptation
of numerical methods to real-time simulation of lumped and distributed parameter systems.
Examples of real-time simulation of control systems.
Keywords
Real-time simulation; LabVIEW; G language; simulation of control systems.
102
Program studiów I-ego stopnia na kierunku automatyka i robotyka
PROJEKTOWANIE I PROTOTYPOWANIE DEDYKOWANYCH
UKŁADÓW STEROWANIA
Przedmiot obowiązkowy
Prowadzący Dr
inż. Roman Czyba
(roman.czyba@polsl.pl)
Rozkład Semestr
6
W
2
Ćw
–
Lab
–
Proj
1
Sem
–
Egz
–
ECTS
2
Cel
Celem przedmiotu jest zapoznanie słuchaczy z podstawowymi zasadami
efektywnego projektowania i prototypowania systemów automatyki, z
uwzględnieniem nowych możliwości w zakresie zarządzania projektem oraz
modelowania i szybkiego prototypowania. Znaczna część kursu poświęcona
jest na omówienie specjalizowanych bibliotek Matlab’a i Simulink’a,
służących do komunikacji pakietu z urządzeniami zewnętrznymi, co z kolei
umożliwia szybkie prototypowanie i pracę w czasie rzeczywistym w trybie
HiL.
Opis
Rys historyczny problematyki; komputerowe wspomaganie projektowania
i produkcji; projektowanie jako część cyklu życia produktu; oprogramowanie
wspomagające modelowanie i symulację
− Matlab, Simulink, Modelica,
Dymola; wybrane biblioteki Matlab’a i Simulink’a; rola modelowania i
identyfikacji w projektowaniu układów automatyki; wybrane zagadnienia
projektowania mechatronicznego; szybkie prototypowanie układów
sterowania; metoda HiL; rozwiązania programowe wspomagające
prototypowania; rozwiązania sprzętowe wspomagające prototypowanie;
struktury dedykowane Matlab’a; prototypowanie systemów na sprzęcie
docelowym.
Słowa
kluczowe
Projektowanie układów regulacji; szybkie prototypowanie algorytmów
sterowania; układy dedykowane; symulacja w czasie rzeczywistym; symulacja
w trybie HiL; CAD układów regulacji; CACSD; układy mechatroniczne.
Wykład
1. Rys historyczny problematyki projektowania układów regulacji. Podstawowe pojęcia.
Trendy rozwojowe systemów wspomagania projektowania i symulacji: ewolucja narzędzi
projektowych, przegląd pakietów i środowisk zintegrowanych. Fazy procesu
projektowania. Przykłady procesów projektowania.
2. Komputerowe wspomaganie projektowania i produkcji. Systemy CAD/CAM. PDM
−
system zarządzania danymi projektowymi i produkcyjnymi. Mechatronika
− projektowanie
systemów mechatronicznych.
3. Projektowanie jako część cyklu życia produktu. Tradycyjny sposób projektowania
wyrobów. Mechatroniczne podejściwe do projektowania wyrobów. Zarządzanie projektem
i etapy projektowania: inicjowanie projektu, specyfikacja i analiza wymagań, faza
projektowania wstępnego, projektowanie szczegółowe podsystemów, szybkie
prototypowanie i symulacja HiL układu sterowania, faza implementacji.
4. Oprogramowanie wspomagające modelowanie i symulację
− Matlab/Simulink. Obiekty
grafiki uchwytów.
5. Wybrane biblioteki Matlab’a i Simulink’a: Robust Control Toolbox, Stateflow, Virtual
Reality Toolbox.
103
6. Modelica jako język modelowania fizycznego. Tworzenie klas modeli. Biblioteka
standardowa i biblioteka dodatkowa modeli.
7. Dymola
− obiektowo zorientowany pakiet do modelowania i symulacji obiektów
fizycznych. Moduł Dymosim (Dynamic Model Simulator). Moduł Dymoview.
8. Rola modelowania i identyfikacji w projektowaniu układów automatyki.
9. Wybrane zagadnienia projektowania mechatronicznego. Przykład systemu
machatronicznego. Model kinematyczny i dynamiczny podsystemu mechanicznego.
Integracja podsystemów w schematach blokowych Simulinka.
10. Szybkie prototypowanie układów sterowania. Symulacja komputerowa. Dostrajanie
parametrów sterownika wirtualnego. Przygotowanie modelu sterownika do symulacji w
czasie rzeczywistym. Warianty prototypowania i implementacji systemów automatyki z
użyciem różnego sprzętu do prototypowania.
11. Metoda HiL (ang. hardware in the loop). Automatyczne generowanie kodów regulatorów
bezpośrednio ze środowiska CACSD. Symulacja w czasie rzeczywistym. Warianty
realizacji symulacji HiL. Przetworniki ADDA. Karty prototypowe.
12. Rozwiązania programowe wspomagające prototypowania – rozszerzenia Matlab’a: Real-
Time Workshop, Real-Time Workshop Embedded Coder, Real-Time Windows Tatget,
xPC Target.
13. Rozwiązania sprzętowe wspomagające prototypowanie. Karty firmy dSPACE.
Jednopłytowe komputery przemysłowe pracujące pod nadzorem systemu operacyjnego
czasu rzeczywistego (PC104). Jednopłytowe komputery programowalne (Qwerk). Moduły
specjalistyczne wykorzystujące mikrosterowniki (Embedded Controller).
14. Struktury dedykowane Matlab’a: Embedded Target for Motorola, Embedded Target for TI
DSP Platform.
15. Prototypowanie systemów na sprzęcie docelowym. Mikrosterowniki i oprogramowanie
dSPACE TargetLink. Prototypowanie regulatorów na komputerze przemysłowym.
Zajęcia projektowe
Celem zajęć projektowych jest praktyczne zapoznanie studentów z komercyjnymi pakietami
oprogramowania oraz z zagadnieniami komputerowo wspomaganego projektowania układów
sterowania w strukturach dedykowanych (ang. Embedded Systems). Do projektowania oraz
symulacji układów sterowania korzysta się z pakietu Matlab/Simulink, oraz języków opartych
o modelowanie fizyczne – Modelica i Dymola. Program obejmuje krótkie wprowadzenie do
posługiwania się pakietami oprogramowania (1 sesja), omówienie tematów projektów
(1 sesja) dla poszczególnych grup studentów (3 osoby w sekcji), oraz wykonanie projektu
wspomagane konsultacjami z prowadzącymi. Tematy projektów są w każdym roku różne
i czasami są rozwinięciem projektów wykonywanych w poprzednich latach.
Wyposażenie laboratoryjne
Cztery sale laboratoryjne wyposażone w 16 komputerów PC z oprogramowaniem
specjalistycznym (w tym Matlab/ Simulink, Modelica, Dymola).
Stanowiska fizyczne: sterowanie położeniem kątowym modelu śmigłowca Humusoft
CE150, sterowanie wahadłem odwróconym, układ lewitacji pneumatycznej ze sterownikiem
mikrokontrolera PIC 16F877, w przygotowaniu stanowisko do badania układu napędowego
(silnik – sprzęgło elektromagnetyczne).
Laboratorium posiada również: kartę DSP1102 firmy dSPACE z procesorem sygnałowym
TMS320C31, kartę wielofunkcyjną I/O MF 624 firmy Humusoft, kartę specjalizowaną
MC101 do sterowania silników krokowych, jednopłytowy komputer programowalny Qwerk.
Metody nauczania
Wykład prowadzony jest w sposób interaktywny w postaci prezentacji PowerPoint’a,
wzbogacony licznymi przykładami i symulacjami w programie Matlab/Simulink.

104
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Projekt odbywa się w sekcjach 3
−osobowych. Studenci realizują wybrany temat w
środowiskach programistycznych, bądź na stanowiskach laboratoryjnych. Wykonanie
projektu wspomagane jest konsultacjami z prowadzącymi.
Warunki zaliczenia
Zaliczenie wykładu na podstawie sprawdzianu.
Zaliczenie projektu na podstawie opracowanego programu komputerowego, lub działającej
aplikacji na stanowisku laboratoryjnym, oraz raportu końcowego przygotowanego zgodnie
z obowiązującym szablonem.
Końcowa ocena jest średnią arytmetyczną.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: algebry liniowej, analizy matematycznej, przekształcenia
Laplace’a i Z, metod numerycznych, mechaniki klasycznej, programowania w Matlab’ie
i języku C++, podstaw automatyki i robotyki, stosowania opisu matematycznego do procesów
dynamicznych, ciągłych i dyskretnych; projektowania prostych ciągłych i dyskretnych
układów regulacji procesami ciągłymi ze sprzężeniem od wyjścia lub stanu; tworzenia
prostych modeli symulacyjnych.
Literatura podstawowa
1. Mrozek Z.: Komputerowo wspomagane projektowanie systemów mechatronicznych.
Zeszyty Naukowe Politechniki Krakowskiej, seria Inżynieria Elektryczna
i Komputerowa, Kraków, 2002.
2. Osowski S., Cichocki A., Siwek K.: MATLAB w zastosowaniu do obliczeń obwodowych i
przetwarzania sygnałów. Oficyna Wydawnicza Politechniki Warszawskiej, Warszawa,
2006.
3. Szymkat M.: Komputerowe wspomaganie w projektowaniu układów regulacji. WNT,
1993.
4. Hristu-Varsakelis, Dimitrios, Levine, William: Handbook of networked and embedded
control systems. Springer, 2005.
5. Brzózka J.: Regulatory i układy automatyki. WNT, Warszawa, 2004.
Literatura uzupełniająca
1. http://www.mathworks.com/
2. http://www.modelica.org/
3. Gessing R.: Podstawy automatyki. Wyd. Pol. Śl., Gliwice, 2001.
4. Mrozek B., Mrozek Z.: Matlab i Simulink – poradnik użytkownika. Wydawnictwo Helion,
Gliwice, 2004.
EMBEDDED CONTROL SYSTEMS DESIGN AND PROTOTYPING
Objective
The subject aims at making students familiar with basic knowledge in the fields of efficient
design and prototyping of control systems, particularly with a new possibility within the range
of project management, modelling and fast prototyping. Considerable part of the course deals
with a presentation of Matlab and Simulink Toolboxes, which allow to connect the software
package to physical systems, and provide for rapid prototyping and hardware-in-the-loop
simulation in real time.
Description
Historical outline; computer aided design and production; design as a part of product life
cycle; software aided modelling and simulation
− Matlab, Simulink, Modelica, Dymola;
selected Matlab and Simulink Toolboxes; significance of modelling and identification in
automatic systems design; selected problems of mechatronic design; fast prototyping of

105
control systems; HiL method; software for prototyping; hardware for prototyping; Matlab
embedded structures; embedded systems prototyping.
Keywords
Control systems design; fast prototyping of control algorithms; embedded systems;
simulation in real time; HiL simulation; CAD of control systems; CACSD; mechatronic
systems.

106
Program studiów I-ego stopnia na kierunku automatyka i robotyka
PRZETWARZANIE OBRAZÓW CYFROWYCH
Przedmiot obowiązkowy
Prowadzący Dr hab. Bogdan Smołka
(bogdan.smolka@polsl.pl)
Rozkład Semestr
6
–
W
2
–
Ćw
–
–
Lab
1
1
Proj
–
–
Sem
–
–
Egz
–
–
ECTS
2
2
Cel
Celem przedmiotu jest wprowadzenie do metod przetwarzania oraz
rozpoznawania obrazów cyfrowych. Studenci poznają podstawowe techniki
przetwarzania sygnałów wizyjnych i po wysłuchaniu cyklu wykładów, bazując
na pozyskanej wiedzy oraz korzystając z literatury źródłowej, tworzą własne
aplikacje komputerowe w ramach ćwiczeń laboratoryjnych.
Opis Przedmiotem
wykładu są podstawowe zagadnienia związane z przetwarzaniem
i rozpoznawaniem obrazów cyfrowych. W trakcie wykładów poruszane są
głównie tematy związane z percepcją obrazów przez człowieka, metodami
poprawy jakości obrazów cyfrowych, algorytmami detekcji obiektów,
przekształceniami obrazów binarnych, kompresją obrazów, formatami plików
graficznych, transformacjami w dziedzinie częstotliwości oraz metodami
morfologicznymi. Szczególny nacisk położony jest na zastosowaniach
praktycznych omawianych zgadnień oraz na metodach implementacji
wybranych algorytmów w języku JAVA i środowisku IMAGEJ oraz w języku
MATLAB.
Słowa
kluczowe
Obraz cyfrowy; transformacje histogramu; redukcja szumu; filtracja liniowa,
filtry nieliniowe; transformata Fouriera; detekcja krawędzi; morfologia
matematyczna; przetwarzanie obrazów barwnych; detekcja obiektów.
Wykład
Znaczenie informacji obrazowej oraz możliwości jej wykorzystania w sterowaniu,
diagnostyce i kontroli jakości. Przykłady zastosowań różnorodnych metod obrazowania
w medycynie, nauce i technice. Budowa oka i układu wzrokowego człowieka. Wybrane
zagadnienia psychofizjologii widzenia, (percepcja barw i złudzenia optyczne). Wprowadzenie
do metod przetwarzania obrazów cyfrowych. Metody akwizycji obrazów cyfrowych. Pojęcia
przetwarzania i analizy obrazu. Formaty zapisu informacji obrazowej. Kodowanie informacji
obrazowej. Operacje punktowe. Kwantyzacja i próbkowanie. Przetwarzanie histogramowe.
Operacje arytmetyczne i logiczne na obrazach. Operacje na poszczególnych bitach obrazu.
Filtry liniowe i nieliniowe. Metody redukcji szumów. Podstawowe filtry oparte na
statystykach porządkowych. Metody poprawy jakości obrazów. Miary obiektywne jakości
obrazów. Detekcja krawędzi, (operatory pierwszej i drugiej pochodnej, operatory LOG i
DOG, binaryzacja z histerezą, operator Canny’ego). Transformata Hough’a. Metody
binaryzacji obrazów. Elementy geometrii dyskretnej. Elementy morfologii matematycznej.
Transformacja Fouriera i przetwarzanie obrazów w dziedzinie częstotliwości. Transformata
kosinusowa i format JPEG. Filtracja szumów i zakłóceń periodycznych metodami
częstotliwościowymi. Modele przestrzeni barw. Przetwarzanie obrazów barwnych. Filtracja
szumów w obrazach barwnych, (mediana wektorowa). Wybrane zagadnienia kompresji
sygnału wizyjnego. Detekcja obiektów. Pomiar i rozpoznawanie obiektów, (współczynniki

107
kształtu, momenty geometryczne). Pomiary na obrazach i interpretacja informacji obrazowej.
Metody analizy, generowania i opisu tekstur. Segmentacja obrazów cyfrowych.
Zajęcia laboratoryjne
1. Wprowadzenie do pakietu Image Processing Toolbox programu MATLAB.
2. Przetwarzanie obrazów w środowisku IMAGEJ opartym na języku programowania JAVA.
3. Algorytmy przetwarzania wstępnego. Filtry liniowe, operacje na histogramach,
przekształcenia jednopunktowe.
4. Formaty plików graficznych. Analiza wpływu poziomu kompresji obrazu na jego jakość
percepcyjną.
5. Redukcja szumów impulsowych w obrazach cyfrowych. Metody filtracji oparte na
statystykach porządkujących.
6. Poprawa jakości barwnych obrazów cyfrowych. Filtry oparte na medianie wektorowej.
7. Analiza i klasyfikacja obiektów metodą wyznaczania cech niezmienniczych.
8. Metody binaryzacji obrazów.
9. Zastosowanie morfologii matematycznej do rozpoznawania obiektów.
10. Metody detekcji krawędzi. Transformata Hough’a.
11. Przekształcenia geometryczne obrazu. Efekty specjalne..
12. Rozpoznawanie obiektów w barwnych obrazach cyfrowych. Metody histogramowe.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w zestaw 15 komputerów PC z oprogramowaniem
specjalistycznym MATLAB z toolboxem do przetwarzania obrazów oraz zainstalowanym
środowiskiem IMAGEJ z kompilatorem JAVY.
Metody nauczania
Wykład jest ilustrowany slajdami oraz sekwencjami video. Ponadto jest on wzbogacony
prezentacją technik przetwarzania obrazów z wykorzystaniem środowiska IMAGEJ.
Laboratorium odbywa się w
sekcjach dwuosobowych. Studenci opracowywują
i implementują wybrane algorytmy przetwarzania obrazów cyfrowych korzystając z pakietów
środowiska MATLAB oraz IMAGEJ.
Warunki zaliczenia
Zaliczenie wykładu na podstawie sprawdzianu oraz sprawozdania z ćwiczeń wykonanych
przez studentów. Ćwiczenia te oparte są na wskazanych podczas wykładów apletach Javy i
mają na celu ugruntowanie treści wykładów oraz sprawdzenie przez studentów stopnia
zrozumienia omawianych zagadnień.
Zaliczenie laboratorium na podstawie indywidualnych zaliczeń poszczególnych ćwiczeń.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie analizy matematycznej oraz podstaw probabilistyki.
Literatura podstawowa
1. Tadeusiewicz R., Korohoda P., Komputerowa analiza i przetwarzanie obrazów,
Wydawnictwo Fundacji Postępu Telekomunikacji, Kraków 1997.
2. Tadeusiewicz R., Systemy wizyjne robotów przemysłowych, WNT 1992.
3. Zabrodzki J, (Red.), Grafika komputerowa. Metody i narzędzia, Warszawa, WNT 1994.
4. Malina W, Smiatacz M., Metody cyfrowego przetwarzania obrazów, Wydawnictwo EXIT,
Warszawa 2005.
5. Materiały w wersji elektronicznej udostępnione w dedykowanej przedmiotowi witrynie
internetowej: http://cnap.polsl.pl/piro/.
Literatura uzupełniająca
1. Gonzalez R.C., Woods R.E, Digital image processing, Prentice Hall, 2002.

108
Program studiów I-ego stopnia na kierunku automatyka i robotyka
2. Russ J.C., The image processing handbook, Boca Raton, CRC Press 1995.
3. Wróbel Z., Koprowski R., Praktyka przetwarzania obrazów w programie MATLAB,
Wydawnictwo EXIT, Warszawa 2004.
4. Pavlidis T., Grafika i przetwarzanie obrazów, WNT, 1987.
5. Zieliński K.W., Strzelecki M., Komputerowa analiza obrazu biomedycznego, Wstęp do
morfometrii i patologii ilościowej, Wydawnictwo Naukowe PWN, 2002.
DIGITAL IMAGE PROCESSING
Objective
The objective of this course is the introduction into the methods of digital image
processing and pattern recognition. The students learn the basic techniques of visual signal
processing and after the course, using the acquired knowledge and recommended literature,
they are supposed to be able to build their own applications of algorithms introduced during
the course.
Description
The course covers the basic topics of digital image processing and pattern recognition. The
lectures are focused mainly on: image perception by humans, methods of image enhancement,
techniques of object detection, binary image processing, image compression, description of
digital image formats, transformations in the frequency domain and algorithms of
mathematical morphology. The main emphasis is placed on the practical applications of the
discussed topics and on the technical issues connected with the use of JAVA and MATLAB
for the processing of digital images.
Keywords
Digital image; histogram transformations; noise reduction; linear and nonlinear filtering;
Fourier transform; edge detection; mathematical morphology; color image processing; object
detection.

109
URZĄDZENIA AUTOMATYKI
Przedmiot obowiązkowy
Prowadzący Prof. dr hab. inż. Mieczysław Metzger
(mieczyslaw.metzger@polsl.pl)
Rozkład Semestr
6
7
W
2
–
Ćw
1
–
Lab
–
2
Proj
–
–
Sem
–
–
Egz
E
–
ECTS
5
2
Cel Celem
zajęć jest nauczenie studentów podstaw analizy i syntezy urządzeń
automatyki przemysłowej. Aczkolwiek omawiane są wszystkie typy urządzeń
automatyki (przedmiot jest dla całego roku) to szczególną uwagę poświęca się
urządzeniom wykonawczym.
Opis Ze
względu na olbrzymi materiał, jaki jest zawarty w literaturze, zakres
przedmiotu obejmuje specjalnie wyselekcjonowane, na podstawie wieloletniej
praktyki, wiadomości i umiejętności wystarczające do analizy urządzeń
automatyki. Program obejmuje większość urządzeń automatyki takich jak
sterowniki i regulatory, urządzenia pomiarowe procesowe oraz urządzenia
wykonawcze. Szczególną uwagę poświęca się urządzeniom wykonawczym.
Wprowadzeniem do wykładu są podstawy teoretyczne mechatroniki
Słowa
kluczowe
Podstawy teoretyczne mechatroniki; urządzenia wykonawcze; zawory
regulacyjne; pompy dozujące; siłowniki pneumatyczne; elektryczne
i hydrauliczne; przetworniki pomiarowe; urządzenia inteligentne; sterowniki
i regulatory
Wykład
Podstawy teoretyczne mechatroniki. Adaptacja podstawowych umiejętności z zakresu
dynamiki i sterowania dla syntezy i obsługi urządzeń automatyki. Wykorzystanie idei
sprzężenia zwrotnego w urządzeniach automatyki. Transmisja sygnałów przemysłowych.
Nadal dominujący przesył analogowy 0-10V i 4-20mA. Wady i zalety transmisji
analogowej. Związany z transmisją analogową standard HART. Transmisja cyfrowa i
bezprzewodowa.
Historyczne układy automatyki. Regulator przepływu Ktesibiousa (3 wiek pne),
spłuczka WC.
Urządzenia wykonawcze. Struktury: pozycjoner-siłownik-nastawnik. Bierne
sterowanie przepływem płynu. Zawory i ich charakterystyki. Rodzaje zaworów. Dobór
współczynnika kv (Cv). Charakterystyki liniowe i stałoprocentowe. Dobór
charakterystyki do obiektu. Dobór średnicy zaworu.
Siłowniki. Siłownik pneumatyczny jako nadal dominujące urządzenie. Pozycjonery.
Charakterystyki statyczne i dynamiczne. Pozycjonery inteligentne. Siłowniki elektryczne.
Napędy elekryczne. Serwomechanizmy i ich analiza w ujęciu cybernetycznym.
Regulatory krokowe i sterowanie silnikiem stałoprądowym. Siłowniki hydrauliczne.
Elementy sterujące. Silniki hydrauliczne. Serwomechanizmy hydrauliczne.
Elementy wykonawcze czynne. Pompy perystaltyczne. Dobór głowicy i przewodu.
Pompy dozujące tłokowe. Inteligentne sterowniki pomp dozujących. Dozowanie
materiałów sypkich. Nastawianie energii. Sterowanie z modulacją szerokości impulsu.
Procesowe urządzenia pomiarowe. Sensory i czujniki. Zasilanie pętli prądowych.
Podłączenie sygnałów analogowych. Wykorzystanie Internetu i WWW we współczesnej
transmisji informacji. Transmisja bezprzewodowa i jej perspektywy ewentualnej dominacji.

110
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Przetworniki inteligentne (SMART).
Sterowniki i regulatory – tylko dane ogólne (na poszczególnych specjalnościach będzie
wiele przedmiotów specjalistycznych). Ogólny schemat sterownika mikroprocesorowego.
Algorytm i regulator PID. Ograniczenie sygnału. Zatrzymanie całkowania. Bezuderzeniowe
przełączanie M/A – ogólna idea. Charakterystyki statyczne regulatora P.
Ćwiczenia tablicowe
1. Klasyfikacja urządzeń wykonawczych. Ogólne zasady doboru UW do obiektu sterowania.
Zdefiniowanie współczynnika wymiarowego- K
v
zaworu. Omówienie charakterystyk
otwarcia zaworu liniowego i stałoprocentowego. Równoległe i szeregowe połączenia
zaworów
2. Wyprowadzenie i komentarz zależności określającej rodzinę charakterystyk roboczych
zaworów uwzględniających wpływ dodatkowych oporów hydraulicznych instalacji.
Rozwiązanie przekładów polegających na określeniu współczynników: K
v
zaworu i
współczynnika charakteryzującego wpływ dodatkowych oporów hydraulicznych instalacji.
3. Zaprezentowanie sposobu rozstrzyganiu „dylematu projektanta”(zawór liniowy czy
stałoprocentowy) na różnych przykładach układów regulacji. Sprawdzian po pierwszej
części ćwiczeń.
4. Klasyfikacja siłowników – zalety i wady poszczególnych rozwiązań. Dyskusja modeli
dynamicznych i statycznych siłowników. Synteza ogólnego schematu blokowego
siłownika współpracującego z różnymi typami pozycjonerów.( w tym pozycjonera
inteligentnego).
5. Analiza przykładu ilustrującego zmniejszenie wpływu istotnych zakłóceń (tarcie, zmiana
parametrów konstrukcyjnych siłownika) na charakterystykę regulacyjną układu pozycjoner
– siłownik.
6. Przedstawienie różnych koncepcji budowy pozycjonerów i sposobów porównywania
sygnałów na ich wejściach. Porównanie pozycjonera inteligentnego z klasycznym
rozwiązaniem analogowym. Analiza własności regulacyjnych wybranych regulatorów
bezpośredniego działania ciśnienia i przepływu stosowanych w automatyce..
7. Prezentacja różnych koncepcji budowy i działania regulatorów temperatury
bezpośredniego działania stosowanych w klimatyzacji ciepłownictwie. Sprawdzian po
drugiej części ćwiczeń.
Zajęcia laboratoryjne
1. Przetworniki inteligentne i protokół HART
2. Zawory
3. Siłowniki
4. Inteligentny ustawnik pozycyjny
5. Pompy dozujące
6. Pompy perystaltyczne
7. Sterowanie z modulacją szerokości impulsu
8. Cyfrowy regulator krokowy
9. Napędy elektryczne z falownikiem
10. Napęd elektryczny ze sterownikiem ruchu.
11. i 12. Dobór aparatury do przykładowego procesu – miniprojekt.
Wyposażenie laboratoryjne
W ramach ćwiczeń laboratoryjnych studenci mają dostęp do nowoczesnego i stale
unowocześnianego unikatowego sprzętu: w tym regulatory cyfrowe, przetworniki inteligentne
oraz sterowane mikroprocesorowo pompy dozujące impulsowe i perystaltyczne jak również
zawory przemysłowe i siłowniki różnego typu. Szczegolną uwagę poswięca się urządzeniom
wykonawczym oddziaływującym na więkkszość wielkości procesowych w automatyce
przemysłowej.

111
Metody nauczania
Ze względu na charakter przedmiotu wykład prowadzony jest metodą tradycyjną dla
podstaw oraz z wykorzystaniem prezentacji w PowerPoint danych i schematów aktualnego
sprzętu. Ćwiczenia tablicowe prowadzone są metodą tradycyjną, prowadzący formułuje
i rozwiązuje zadania. Laboratorium odbywa się w sekcjach rozliczeniowych (droga aparatura
unikatowa) ale występuje podział na kilka grup roboczych o indywidualnych zadaniach
badawczych, które muszą być oddzielnie umieszczone w sprawozdaniu sekcji. Dla studentów,
którzy chcieliby dodatkowo przeprowadzić indywidualnie jakieś badania zakład U
2
A
deklaruje dzień otwarty wszystkich laboratoriów o unikatowym sprzęcie z opieką
prowadzących.
Warunki zaliczenia
Zaliczenie przedmiotu odbywa się na podstawie zaliczenia ćwiczeń tablicowych.
Ponieważ dopuszczona jest możliwość zwolnienia z egzaminu dla studentów mających
zaliczenie na ocenę 5, na ćwiczeniach są dwa ostro oceniane sprawdziany oraz kolokwium
zaliczeniowe na wykładzie.
Egzamin tylko pisemny.
Osobne zaliczenie laboratorium na podstawie pisemnego zaliczenia większości ćwiczeń na
sprawdzianach i zaliczeniach.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: elektrotechniki i elektromechaniki, elektroniki, podstaw
automatyki, dynamiki układów i dynamiki procesów, podstaw miernictwa.
Literatura podstawowa
Czasopisma:
1. Control Engineering Polska,
2. Napędy i sterowanie
Literatura uzupełniająca
Prowadzący dysponuje pojedynczymi egzemplarzami większości najważniejszych
książek z dziedziny urządzeń automatyki „control and instrumentation” (Elgar, Anderson,
Johnson, Nachtigal, McMillan itd.). Książki są udostępniane na żądanie.
CONTROL INSTRUMENTATION
Objective
The major purpose of the course is to present instrumentation for process control as
well as basic general problems of appropriate instrument choice.
Description
The area which is presented during two trimesters, deals with all the most important prob-
lems in analysis of basic problems in control instrumentation. The course includes all the most
important kinds of control instruments such as for example, control valves with intelligent
actuators, programmable metering pumps, electric equipment, standard and programmable
smart transmitters, sensors and simple programmable controllers. Motion equipment.
Keywords
Instrumentation for control; basics of mechatronics; control valves; actuators; programma-
ble metering pumps; smart transmitters and sensors; controllers; motion instrumentation.
112
Program studiów I-ego stopnia na kierunku automatyka i robotyka
STEROWNIKI I SIECI PRZEMYSŁOWE
Przedmiot obowiązkowy
Prowadzący Dr hab. inż. Jerzy Kasprzyk, Dr inż. Janusz Hajda
(jerzy.kasprzyk@polsl.pl, janusz.hajda@polsl.pl)
Rozkład Semestr
6
7
W
2
1
Ćw
–
–
Lab
2
1
Proj
–
–
Sem
–
–
Egz
–
–
ECTS
2
2
Cel
Celem przedmiotu jest nauczenie podstaw obsługi i programowania
sterowników przemysłowych (PLC) na przykładzie produktów wybranych
firm, zapoznanie z zasadami projektowania układów sterowania opartych na
PLC, tworzenia interfejsu człowiek-maszyna, komunikacji w sieciach
przemysłowych i rozproszonych systemach sterowania.
Opis
Sterowniki programowalne PLC – pojęcia podstawowe, zasada działania i
programowania; norma IEC 61131; elementy języków programowania; języki
tekstowe: IL i ST oraz graficzne: LD i FBD; graf sekwencji SFC; konfiguracja
systemu; sprzęt sterowników PLC; jednostka centralna CPU; moduły
sterowników; programowanie wybranych rodzin sterowników firm: Allen-
Bradley, Schneider, Siemens; programowanie algorytmu PID w sterownikach
PLC; tworzenie interfejsu operatora; rozproszony system sterowania
i monitoringu; sieć przemysłowa; metody i protokoły transmisji; podział
funkcjonalny sieci; model ISO; przykłady sieci przemysłowych.
Słowa
kluczowe
Sterownik programowalny; sprzęt sterowników; oprogramowanie
sterowników; języki programowania; interfejs człowiek-maszyna; sieć
przemysłowa; protokół komunikacyjny; rozproszony system sterowania.
Wykład
Semestr 6:
1. Wprowadzenie do sterowników programowalnych PLC – miejsce sterowników w systemie
sterowania, zasada działania i programowania sterownika, proste przykłady układów
sterowania silnikiem.
2. Norma IEC 61131 – części normy, model oprogramowania, model komunikacji, elementy
języków programowania.
3. Typy danych (elementarne i pochodne), deklaracje zmiennych. Jednostki organizacyjne
oprogramowania - funkcje, bloki funkcjonalne, programy. Funkcje i bloki funkcjonalne
standardowe.
4. Graficzne języki programowania - schemat drabinkowy LD, schemat bloków
funkcjonalnych FBD.
5. Tekstowe języki programowania - lista rozkazów IL, język strukturalny ST.
6. Programowanie sterowników Simatic S7-300 – pakiet Step 7.
7. Programowanie sterowników Allen-Bradley – pakiet RSLogix5000.
8. Strukturyzacja programu za pomocą schematu funkcji sekwencyjnej SFC.
9. Układy regulacji PID w sterownikach PLC – przykłady realizacji.
10. Elementy konfiguracji – konfiguracje, zasoby, zadania, ścieżki dostępu, sterowanie
wykonywaniem zadań.

113
11. Sprzęt sterowników PLC – moduły sterowników, jednostka centralna CPU, moduły wejść
i wyjść cyfrowych, moduły wejść i wyjść analogowych, zasilanie sterowników.
12. Zwiększenie niezawodności - redundancja w systemie sterowników PLC.
13. Współpraca z systemami SCADA i urządzeniami HMI. Programowanie paneli
operatorskich.
14. Zasady projektowania systemu sterowania opartego na sterownikach PLC.
Semestr 7:
1. Sieci przemysłowe – pojęcia podstawowe: nadajnik, odbiornik, medium, metody i typy
transmisji (analogowa, cyfrowa; simplex, duplex, szeregowa; równoległa, synchroniczne,
asynchroniczna), protokół komunikacyjny.
2. Wymagania stawiane sieciom przemysłowym i wynikający z nich podział funkcjonalny
sieci (Data Bus, Field Bus, Device Bus, Sensor Bus).
3. Model ISO.
4. Media transmisyjne.
5. Topologie sieci i metody dostępu do zasobów.
6. Elementy sieci.
7. Przykłady sieci przemysłowych (modele ISO, przykłady architektury, wady i zalety):
•
Modbus
•
Interbus
•
Uni-Telway
•
Profibus-DP
•
Modbus Plus
•
ControlNet
•
CANopen
•
DeviceNet
•
ASi
•
FIPIO
•
Ethernet TCP/IP Modbus
•
Sieci w automatyce budynków: LonWorks, BACnet, EIB
•
Sieci w urządzeniach pomiarowych: M-bus, HART-bus.
Zajęcia laboratoryjne
Semestr 6:
6 ćwiczeń 4-godzinnych:
1. Programowanie i obsługa sterownika PLC – pakiet Concept
2. Programowanie sterowników w językach tekstowych
3. Programowanie sterowników Simatic S7-300
4. Programowanie sterowników Allen-Bradley
5. Graf sekwencji SFC
6. Interfejs HMI - programowanie paneli operatorskich.
Semestr 7:
6 ćwiczeń 2-godzinnych:
1. Protokół Modbus – sieć sterowników Modicon i urządzeń HMI
2. Komunikacja w sieci Modbus Plus – sieć sterowników Modicon
3. Komunikacja w sieci Profibus-DP cz. 1 – sterowniki Simatic S7
4. Komunikacja w sieci Profibus-DP cz. 2– sterowniki Simatic S7 i WAGO IPC
5. Komunikacja w sieciach DeviceNet/ControlNet – sterowniki Allen-Bradley
6. Komunikacja w sieci Ethernet TCP (Modbus) – sterowniki WAGO IPC i Simatic S7 oraz
system SCADA.

114
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Uwaga dot. cz. I i II: zainteresowani studenci, zamiast realizować program ćwiczeń, będą
mogli wybrać sobie większe projekty do samodzielnego wykonania.
Wyposażenie laboratoryjne
Pięć sal laboratoryjnych wyposażonych łącznie w 25 komputerów PC z oprogramowaniem
specjalistycznym do programowania sterowników i paneli operatorskich oraz konfiguracji
sieci: Concept, Step7, RSLogix 5000, Codesys, Proficy Machine Edition, XBTL, Vijeo
Designer, Vijeo Citect, Proficy iFIX.
Sterowniki następujących firm:
•
Schneider: TSX Modicon Compact i Momentum – 4 szt.
•
Siemens: S7 314 – 4 szt.
•
WAGO: komputery przemysłowe IPC 870-00 – 4 szt.
•
GE Fanuc: serii 90-30 – 3 szt., Versa Max Micro – 2 szt.
•
Rockwell Automation (Allen-Bradley): ControlLogix – 1szt. i FlexLogix – 2 szt.
Panele operatorskie:
•
graficzne Magelis XBTG (12” i 15”) – 2 szt.
•
tekstowe Magelis XBTP – 2 szt.
Ponadto panele dydaktyczne do symulacji obiektów i procesy przemysłowe w skali
laboratoryjnej.
Dopuszcza się samodzielną pracę studentów w laboratorium poza wyznaczonymi
terminami zajęć dydaktycznych.
Metody nauczania
Wykład jest ilustrowany slajdami (udostępniane studentom w postaci plików pdf),
wzbogacony o prezentacje programów komputerowych, z których część dostępna jest
w postaci wersji demonstracyjnych (studenci mogą samodzielnie poznawać oprogramowanie
instalując je na własnych komputerach).
Laboratorium odbywa się w sekcjach dwu lub trzyosobowych. Studenci opracowywują
algorytm sterowania dla podanego zadania, implementują go w sterowniku i testują przy
wykorzystaniu panelu dydaktycznego. Przewiduje się możliwość samodzielnej pracy
studentów nad większymi projektami.
Warunki zaliczenia
Wykład jest zaliczany na podstawie kolokwium pisemnego, laboratorium na podstawie
liczby punktów uzyskanych z poszczególnych ćwiczeń. Ćwiczenia są zaliczane na podstawie
przedstawionej dokumentacji działających programów. Ocena końcowa jest oceną średnią z
kolokwium i laboratorium.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: podstaw techniki cyfrowej, systemów mikroprocesorowych,
miernictwa przemysłowego, podstaw automatyki i urządzeń automatyki.
Literatura podstawowa
1. Kasprzyk J.: Programowanie sterowników przemysłowych. WNT, Warszawa, 2005.
2. Legierski T., Kasprzyk J., Wyrwał J., Hajda J.: Programowanie Sterowników PLC. Wyd.
Prac. Komp. J. Skalmierskiego, Gliwice, 1998.
3. Instrukcje i materiały szkoleniowe poszczególnych producentów (w wersji elektronicznej).
Literatura uzupełniająca
1. Kwaśniewski J.: Programowalne sterowniki przemysłowe w systemach sterowania.
Kraków, 1999.
2. Król A., Moczko-Król J.: S5/S7 Windows. Programowanie i symulacja sterowników PLC
firmy Siemens. Wyd. Nakom, Poznań, 2000

115
3. Mikulczyński T., Samsonowicz Z.: Automatyzacja dyskretnych procesów produkcyjnych.
WNT, Warszawa, 1997
4. John K.H., Tiegelkamp M.: IEC 61131-3: Programming Industrial Automation Systems.
Springer-Verlag, Berlin Heidelberg, 2001.
5. Grzywak A. (red.): Rozproszone systemy komputerowe. PRO-net, Gliwice, 1994.
PROGRAMMABLE CONTROLLERS AND INDUSTRIAL NETWORKS
Objective
The goals of the topic are: to teach students how to use and programm industrial
controllers (PLCs), to present fundamentals on designing and implementation of control
systems based on PLCs, human-machine interface, communication in industrial networks and
distributed control systems.
Description
Programmable Logic Controllers (PLC) – fundamentals of functioning and programming;
IEC 61131 standard; elements of programming languages; textual languages: IL and ST;
graphical languages: LD and FBD; sequential function chart SFC; configuration; PLC
hardware; central processing unit CPU; PLC modules; programming the selected families of
PLCs: Allen-Bradley, Schneider, Siemens; implementation of PID algorithm in PLC;
programming human-machine interface; distributed control systems; industrial network;
transmission methods and protocols; functional classification of networks; ISO model;
examples of industrial networks.
Keywords
Programmable Logic Controller (PLC); PLC hardware; PLC software; programming
languages; human-machine interface; industrial network; communication protocol; distributed
control.

116
Program studiów I-ego stopnia na kierunku automatyka i robotyka
METODY SZTUCZNEJ INTELIGENCJI
Przedmiot obowiązkowy
Prowadzący Dr
inż. Krzysztof Fujarewicz, Dr inż. Adam Gałuszka
(krzysztof.fujarewicz@polsl.pl, adam.galuszka@polsl.pl )
Rozkład Semestr
7
W
2
Ćw
–
Lab
2
Proj
–
Sem
–
Egz
–
ECTS
2
Cel
Celem przedmiotu jest zapoznanie studentów z podstawowymi metodami
sztucznej inteligencji oraz ich zastosowaniami w automatyce i robotyce.
Wykład obejmuje współczesne obszary zainteresowań Sztucznej Inteligencji,
takie jak: przetwarzanie języka naturalnego, percepcja i rozumienie otoczenia,
osiąganie celu, planowanie i wykonywanie zadań, statystyczne systemy uczące
się, podstawowe zagadnienia sieci neuronowych.
Opis
Logiczne i lingwistyczne systemy reprezentacji wiedzy w automatyce i
robotyce; rachunek zdań; system STRIPS; świat klocków; planowanie zadań
jako problem sztucznej inteligencji; złożoność i efektywność obliczeniowa
tych problemów; modelowanie planowania jako systemu zawierającego
niepełną i niepewną informacje; statystyczne systemy uczące się; przykłady
problemów uczenia w automatyce i robotyce; uczenie nadzorowane i
nienadzorowane; klasyfikacja liniowa; klasyfikacja bayesowska; drzewa
klasyfikacyjne; rodziny klasyfikatorów; bagging; boosting; analiza skupień,
grupowanie hierarchiczne; model neuronu i architektura sieci neuronowej;
funkcje aktywacyjne; warstwa neuronów; wielowarstwowa sieć neuronowa;
zastosowanie sieci neuronowych w automatyce i robotyce.
Słowa
kluczowe
Sztuczna inteligencja; podstawy logiki; reprezentacja wiedzy; modelowanie
niepewnej i niepełnej informacji; planowanie i rozwiązywanie problemów;
złożoność obliczeniowa w sztucznej inteligencji; uczenie maszynowe;
klasyfikacja; klasteryzacja; sieci neuronowe.
Wykład
1. Wstęp do sztucznej inteligencji, definicja, krótka historia, przykłady zastosowań.
2. Podstawy klasycznego rachunku logiki, elementy rachunku, reguły wnioskowania,
aksjomaty, tautologie, postaci normalne formuł logicznych, matrycowanie logiki, matryca
klasyczna, semantyczne i syntaktyczne metody wnioskowania.
3. Logiki wielowartościowe, ich matrycowanie, system Kleene’a logiki trójwartościowej,
logika rozmyta, gramatyki, podział gramatyk, algorytmy udowadniające przynależność
wyrażenia do gramatyki.
4. Planowanie i rozwiązywanie problemów w sztucznej inteligencji, system STRIPS, świat
klocków, przykłady planowania z reprezentacją STRIPS: sterowanie silnikiem sondy
kosmicznej, sterowanie inteligentną windą, planowanie w środowisku wielu robotów,
źródła trudności w planowaniu: anomalia Susmann’a i rozmiar przestrzeni stanu problemu.
5. Elementy złożoności obliczeniowej, złożoność a efektywność obliczeniowa, złożoność
obliczeniowa problemów planowania, problem planowania a problem decyzyjny,
planowanie optymalne, redukcja złożoności, strategie zachłanne w planowaniu.
6. Wielomianowa transformacja planowania do zadania programowania liniowego i
binarnego całkowito-liczbowego, przykład z dziedziny świata klocków.

117
7. Modelowanie niepełnej i niepewnej informacji w sztucznej inteligencji, niepewność jako
alternatywa możliwych stanów początkowych problemu, niepewne efekty działań, wpływ
na złożoność obliczeniową i jakość rozwiązania problemu.
8. Statystyczne systemy uczące się, podział metod sztucznej inteligencji na metody
nadzorowanie i nienadzorowane, przykłady zadań klasyfikacji, klasyfikacja liniowa,
metody Fisherowskie klasyfikacji, dyskryminacja logistyczna.
9. Klasyfikacja bayesowska, estymacja parametrów rozkładów w klasach, naiwny
klasyfikator Bayesa, powiązanie klasyfikacji bayesowskiej z metodą największej
wiarygodności, optymalność klasyfikacji bayesowskiej.
10. Nieparametryczne metody estymacji rozkładów w klasach, metoda najbliższych sąsiadów,
ocena jakości klasyfikatora, precyzja, czułość, specyficzność, krzywe ROC, resubstytucja,
metoda hold-out, walidacja krzyżowa, bootstrap.
11. Drzewa klasyfikacyjne, pojęcie drzewa, reguły podziału, przycinanie drzewa, rodziny
klasyfikatorów, algorytmy baggingu i boostingu, lasy losowe.
12. Uczenie nienadzorowanie, analiza składowych głównych, estymacja gęstości
prawdopodobieństwa wzdłuż wybranych kierunków, analiza skupień, metody
kombinatoryczne grupowania, metody hierarchiczne grupowania.
13. Wprowadzenie do sieci neuronowych, podstawy biologiczne, podział i zastosowanie sieci
neuronowych, model neuronu, funkcja aktywacji, algorytm LMS, algorytm perceptronu
Rosenblatta.
14. Warstwa sieci neuronowej, perceptron wielowarstwowy, algorytm propagacji wstecznej
błędu, sieci neuronowe o innej strukturze, sieć Hopfielda.
Zajęcia laboratoryjne
1. Języki formalne (gramatyki)
2. Semantyczne i syntaktyczne systemy wnioskowania
3. Świat klocków
4. Rozwiązywanie problemów jako zadanie programowania liniowego i całkowito-
liczbowego
5. Klasyfikator Bayesa
6. Analiza skupień
7. Algorytm propagacji wstecznej błędu
8. Sieć Hopfielda
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 12 komputerów PC z oprogramowaniem
specjalistycznym (w tym Matlab).
Metody nauczania
Wykład jest prowadzony metodą tradycyjną, wzbogacony o prezentacje programów
komputerowych.
Laboratorium odbywa się w sekcjach dwuosobowych. Studenci opracowują
i implementują metody sztucznej inteligencji poznane na wykładzie.
Warunki zaliczenia
Warunki zaliczenia wykładu: kolokwium zaliczeniowe;
warunki zaliczenia zajęć laboratoryjnych: na podstawie przygotowania do zajęć i
sprawozdania z wykonania ćwiczenia, ocena końcowa jest średnią z ocen cząstkowych.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: elementów metod optymalizacji, podstaw obliczeń
komputerowych i modelowania (Matlab).

118
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Literatura podstawowa
1. Popovic, D.; V.P. Bhatkar. 1994. Methods and Tools for Applied Artificial Intelligence.
Marcel Dekker, Inc., New York, NY.
2. Nilson, N.J. 1980. Principles of Artificial Intelligence. Toga Publishing Company, Palo
Alto, CA
3. Metody Sztucznej Inteligencji – laboratorium, Skrypt Politechniki Śląskiej nr 2138
4. Koronacki J., Ćwik J., Statystyczne systemy uczące się, WNT, Warszawa, 2005.
5. S. Osowski: Sieci neuronowe w ujęciu algorytmicznym, WNT, Warszawa 1996
Literatura uzupełniająca
1. Dougherty, E.R.; C.R. Giardina. 1988. Mathematical Methods for Artificial Intelligence.
Prentice-Hall International, London.
2. Yen, J., R. Langari, L.A. Zadeh. 1995. Industrial Applications of Fuzzy Logic and
Intelligent Systems. IEEE Press. New York
3. Trevor Hastie, Robert Tibshirani, and Jerome Friedman, The Elements of Statistical
Learning: Data Mining, Inference, and Prediction, New York: Springer-Verlag, 2001.
4. S. Haykin. Neural Networks - A Comprehensive Foundation. Macmillan, New York, NY,
1994.
METHODS OF ARTIFICIAL INTELLIGENCE
Objective
The major purpose of the course is to give mathematical bases of artificial intelligence and
to present AI methods and algorithms with application to automation and robotics. The lecture
contains theoretical background for AI methods and artificial neural networks.
Description
Logic system, linguistic logic bases, semantic reasoning, syntactic techniques, logic matri-
ces, predicates, inference engine, reasoning rules and strategies, grammars, STRIPS system,
planning problems with analysis of complexity, planning in the presence of uncertain and
incomplete information, applications of planning, statistical learning systems, supervised and
unsupervised learning, linear classification, Bayes classifier, classification trees, Classifier
committee, bagging, boosting, hierarchical clustering, neural networks, perceptron, learning
rules, application of AI methods and artificial neural networks in automation and robotics.
Keywords
Logic system; STRIPS system; planning; uncertainty and incompleteness; complexity; sta-
tistical learning systems; artificial neural networks.

119
STEROWANIE JAKOŚCIĄ
Przedmiot obowiązkowy
Prowadzący Dr hab. inż. Adam Czornik, Prof. dr hab. inż. Jerzy Frączek
(adam.czornik@polsl.pl, jerzy.fraczek@polsl.pl )
Rozkład Semestr
7
W
2
Ćw
–
Lab
1
Proj
–
Sem
–
Egz
–
ECTS
2
Cel
Celem przedmiotu jest zapoznaie studentów z podstawowymi metodami
uporządkowanego wykrywania rozregulowań procesu produkcji i, tym
sposobem optymalizowania jego jakości. Zapoznanie się z pakietem QCM do
anlalizy danych. Poznanie idei i procedur tworzenia systemów zapewnienia
jakości. Nabycie umiejętności opracowania księgi jakości oraz poznanie
procedur badań międzyinstytucjonalnych, badań biegłości instytucji oraz
walidacji metod badań.
Opis
Statystyczne sterowanie procesem: krótki przegląd; statystyczne sterowanie
procesem oparte na ocenach alternatywnych; karty kontrolne wartości średniej,
odchylenia standardowego, kontrolne przy różnej liczebności próbek; metody
sekwencyjne; karta kontrolna CUSUM; podejscie bazujące na metodach
optymalizacji; problemy wielowymiarowego sterowania procesem; system
jakości stosownie do normy ISO 8402, serii norm ISO 9000 oraz normy EN
ISO/IEC 17025; dokumentacja systemu jakości (księga jakości - procedury
QAG); akredytacja i współpraca międzynarodowa; audity jakościowe
wewnętrzne i zewnętrzne; kompetencje instytucji akredytowanej; walidacja
metod badawczych; system jakości a bezpieczeństwo funkcjonalne.
Słowa
kluczowe
Statystyczne sterowanie jakością; karty kontrolne; test CUSUM; testy
wielokrotne; system jakości wg ISO 9000; akredytacja; walidacja: księga
jakości; bezpieczeństwo funkcjonalne.
Wykład
1. Statystyczne sterowanie procesem: krótki przegląd. Zasady Deninga i osobliwości Pareto.
2. Statystyczne sterowanie procesem oparte na ocenach alternatywnych.
3. Karty kontrolne wartości średniej.
4. Karty kontrolne odchylenia standardowego.
5. Karty kontrolne dla pojedynczych pomiarów.
6. Karty kontrolne przy różnej liczebności próbek.
7. Metody sekwencyjne.
8. Karta kontrolna CUSUM.
9. Podejście bazujące na metodach optymalizacji.
10. Problemy wielowymiarowego sterowania procesem.
11. Systemy zarządzania jakością wg norm ISO, EN oraz IEC.
12. Dokumentacja systemu zarządzania jakością.
13. Księga jakości; akredytacja oraz kompetencje instytucji.
14. Audit wewnętrzny i zewnetrzny, walidacja metod badawczych.
15. Bezpieczeństwo funkcjonalne.
Zajęcia laboratoryjne
1. Wprowadzenie do laboratorium i programu QCM (1godzina)
2. Karty kontrolne ( 3 godziny)

120
Program studiów I-ego stopnia na kierunku automatyka i robotyka
3. Metody sekwencyjne ( 3 godziny)
4. Statystyczne sterowanie procesem jedno i wielo wymiarowym ( 3 godziny)
5. Kiążka jakości (3 godziny
6. Sprawdzenie nabytych umiejętności i dyskusja sprawozdań (2 godziny)
Wyposażenie laboratoryjne
Zajęcia odbywać się będą w dwóch laboratoriach. Każde z nich wyposażone jest w 8
komputerów PC z oprogramowaniem specjalistycznym (w tym QMC).
Metody nauczania
Wykład jest ilustrowany slajdami, wzbogacony o prezentacje programu QMC, materiałami
(slajdy) dotyczącymi zasad tworzenia dokumentacji systemu zarządzania jakością,
dokumentami akredytacji, dokumentami walidacji metod.
Laboratorium odbywa się w
sekcjach dwuosobowych. Studenci opracowywują
przedstawione dane i implementują dostępne w programie QMC algorytmy przetwarzania i
analizy danych. Przeprowadzone badania opracowują w postaci sprawozdań.
Warunki zaliczenia
Test pisemny na zakończenie wykładów.
Warunkiem zaliczenia zajęć laboratoryjnych jest dostarczenie i obrona sprawozdań.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: Rachunku prawdopodobieństwa i statystyki matematycznej,
Miernictwa przemysłowego.
Literatura podstawowa
1. J. M. Thompson, J. Koronaccki, Statystyczne sterowanie procesem, Akademicka Oficyna
Wydawnicza PLJ, Warszawa 1994
2. R. List, Praktyczne zarządzanie jakością. Alfa-Weka, Warszawa 1998 (z uzupełnieniami
na bieżąco).
3. J. Piotrowski, K. Kostyrko, Wzorcowanie aparatury pomiarowej, PWN, Warszawa 2000.
4. Normy: ISO 8402, ISO 9000, EN ISO/IEC 17025.
Literatura uzupełniająca
1. T. P. Ryan, Statistical Methods for Quality Improvement, 2nd ed., Wiley, New York 2000,
NY.
2. J. Frączek, Aparatura przeciwwybuchowa w wykonaniu iskrobezpiecznym, Wyd. „Śląsk”,
Katowice 1995.
3. B. R. Kuc, Audyt wewnętrzny – teoria i praktyka. Wyd. Menadż. PTM, Warszawa 2002.
4. Grant E. L., Leavenworth R. S.: Statistical Quality Control. McGraw-Hill, Int. Ed., New
York 1990.
QUALITY CONTROL
Objective
Use of statistical methods for improvement of quality in industrial setting (Statistical
Process Control). Application of computer package QMC to analysis of simulated and real-
life data. Make acquaintance with: 1). arrangement procedures of quality systems and
accreditation of institutions, 2). How to assure the competence in preparing of “the quality
book”, 3). inter-institutional research procedures, competences and methods of validation of
measurement results.
Description
Departing from the Deming paradigm, the stepwise method of quality improvement, using a
statistical approach, is developed. It leads logically to application of various types of run

121
charts, for monitoring processes with different statistical properties. The run charts vary from
simplest acceptance-rejection charts to sophisticated sequential approaches. Subsequently,
attention will be shifted towards decomposition of the process and design of experiments.
Weekly assignments will generally require the use of a computer package, either of
spreadsheet type (like MS Excel) or the specialized QMC package (will be provided). In some
assignments, students will test new procedures developed for the QMC package. Emphasis
will be divided between sound theoretical principles (using simple probabilistic techniques)
and computational techniques, using simulated and real-life data. Characteristics of Standards:
ISO 8402, ISO 9000-9004, EN ISO/IEC 17025 and Guindance on the “Quality Book”. Basic
sources for preparing of the “Quality Book”. Accreditation institutions. International
cooperation. Arrangement and procesures in inter-institutional research. Research of
competences of institutions – procedures. Validation procedures of research results.Quality
system in the contest of functional safety and explosion-proof (intrinsic safety).
Keywords
Statistical quality control; control charts; CUSUM test; multivariate tests; quality systems;
ISO 9000 standards; accreditation; validation; functional safety; explosion-proof.

122
Program studiów I-ego stopnia na kierunku automatyka i robotyka
STEROWANIE PRODUKCJĄ
Przedmiot obowiązkowy
Prowadzący Dr
inż. Jolanta Krystek
(jolanta.krystek@polsl.pl)
Rozkład Semestr
7
W
2
Ćw
–
Lab
1
Proj
–
Sem
–
Egz
–
ECTS
2
Cel
Celem przedmiotu jest zapoznanie studentów z aktualną wiedzą dotyczącą
zintegrowanych systemów informatycznych klasy ERP, wspomagających
sterowanie produkcją. Wiedza ta umożliwi studentowi udział w komercyjnych
wdrożeniach systemów informatycznych wspomagających sterowanie
produkcją w przedsiębiorstwach w Polsce i za granicą. Szczególny akcent
położony jest na analizę wybranych algorytmów planowania i sterowania
produkcją: MRP, CRP, SFC, MPS, JIT, Kanban oraz NHP metody nadążnego
sterowania produkcji.
Opis
Sterowanie w systemach komputerowo zintegrowanego wytwarzania (CIM);
model Y (Scheer’a) struktury funkcjonalnej systemu CIM; hierarchiczna
struktura funkcjonalna systemów zarządzania i sterowania produkcją;
modelowanie procesów biznesowych; struktura funkcjonalna systemów
MRP II; standard MRP II wg APICS; drzewo struktury wyrobu (BOM);
algorytm planowania potrzeb materiałowych (MRP); sterowanie zleceniami
roboczymi (SFC); algorytm kontroli zdolności produkcyjnych (CRP);
algorytm nadrzędnego harmonogramowanie produkcji (MPS); produkcja
powtarzalna; dynamiczny dobór wielkości partii; synchroniczne procesy
wytwarzania; zapasy produkcji w toku; nadążne sterowanie produkcją;
algorytm Kanban; metoda Just in Time; teoria ograniczeń (TOC); metoda
OPT.
Słowa
kluczowe
Zintegrowany system zarządzania produkcją klasy ERP; modelowanie
procesów biznesowych; komputerowo zintegrowane wytwarzanie; bazy
danych; Kanban; JIT; MRP; CRP; NHP; OPT; TOC.
Wykład
1. Tradycyjne podejście do zagadnień sterowania produkcją. Metody międzykomórkowego
sterowania przepływem produkcji. Metody wewnątrzkomórkowego sterowania
przepływem produkcji.
2. Hierarchiczna struktura organizacyjna przedsiębiorstw przemysłowych. Systemy
logistyczne przedsiębiorstw przemysłowych. Klasyfikacja procesów produkcji. Typy
produkcji. Punkt oddzielenia zamówień klientów.
3. Zarządzanie i sterowanie w systemach komputerowo zintegrowanego wytwarzania (CIM).
Model Y (Scheer’a) struktury funkcjonalnej systemu CIM. Zmienne decyzyjne w metodzie
zarządzania zasobami produkcyjnymi (MRP II). Struktura funkcjonalna systemów MRP II.
Standard MRP II wg APICS. Struktura danych w systemach MRP II.
4. Produkty i materiały zaopatrzeniowe. Produkty uboczne i odpady. Procesy wytwarzania
i ich technologie. Procesy wykonawcze. Marszruty wykonawcze i technologiczne.
Operacje robocze. Kalendarze planistyczne. Zlecenia produkcyjne i zlecenia robocze.
5. Drzewo struktury wyrobu (BOM). Indeks materiałowy (IM). Planowanie potrzeb
materiałowych (MRP). Marszruty podstawowe. Czasy wyprzedzenia na realizację

123
typowych zleceń roboczych. Potrzeby brutto i potrzeby netto. Obliczanie potrzeb netto
i zleceń produkcyjnych za pomocą algorytmu MRP. Organizacja przetwarzania danych
w algorytmie MRP.
6. Sterowanie zleceniami roboczymi (SFC) metodą wstecznego szeregowania zadań.
Ograniczenia zleceń roboczych. Obciążenie centrów roboczych. Algorytm kontroli
zdolności produkcyjnych centrów roboczych (CRP).
7. Nadrzędne harmonogramowanie produkcji (MPS). Zgrubna kontrola obciążenia zdolności
produkcyjnych wybranych centrów roboczych. Planowanie taktyczne (SOP).
8. Planowanie i harmonogramowanie produkcji. Harmonogramowanie z ograniczeniami.
9. Klasyczne metody sterowania zapasami. Optymalna wielkość partii przy stałym popycie.
Problem dynamicznego doboru wielkości partii i jego znaczenie w systemach MRP II.
Algorytmy „partia na partię”, „ekonomicznej wielkości partii”, Silvera-Meala i Wagnera–
Withina.
10. Sterowanie produkcją metodą „dokładnie na czas” (JIT). Algorytm Kanban.
11. Teoria ograniczeń. Zasady sterowania produkcją metodą OPT. Algorytm DBR.
12. Struktury systemów sterowania. Strategie sterowania produkcją. System „push”. System
„pull”.
13. Struktura wielowarstwowa systemu nadążnego sterowania produkcją. Współbieżne
synchroniczne procesy wykonawcze. Zapasy produkcji w toku. Zaległości w realizacji
planów nadrzędnych i struktura zapasów w wielopoziomowym systemie sterowania
produkcją. Metoda nadążnego sterowania produkcją (NSP).
14. Zarządzanie projektami. Zintegrowany system zarządzania produkcją klasy ERP.
15. Modelowanie procesów biznesowych.
Zajęcia laboratoryjne
1. Struktura informacyjna fabryki samochodów osobowych.
2. Przepływ materiałów w fabryce samochodów osobowych.
3. Planowanie potrzeb materiałowych (MRP) dla produkcji ognioszczelnej stacji
transformatorowej 1250/61.
4. Produkcja foteli - harmonogramowanie zleceń produkcyjnych.
5. Harmonogramowanie operacyjne z ograniczeniami zleceń produkcyjnych w systemie
gniazdowym.
6. Symulacja algorytmu Kanban w procesie produkcji kompletu kół rowerowych.
7. Analiza zasobów krytycznych w liniach montażowych.
Wyposażenie laboratoryjne
Laboratorium jest wyposażone w 32 stacje robocze z komercyjnym oprogramowaniem
IFS Applications (zainstalowanym na serwerze sieciowym) działającym na bazie Oracle.
Metody nauczania
Wykład jest ilustrowany slajdami, wzbogacony o prezentacje programów komputerowych.
W trakcie zajęć laboratoryjnych student pracuje samodzielnie na przydzielonej mu stacji
roboczej z zainstalowaną końcówką klienta ZSI IFS Applications.
Warunki zaliczenia
Zaliczenie wykładu – na podstawie opracowywanych przez studentów dodatkowych
zagadnień.
Zaliczenie laboratorium – na podstawie indywidualnego zaliczenia wszystkich ćwiczeń w
oparciu o ocenę wykonania zadań zleconych w trakcie laboratorium, wykonania i obrony
sprawozdania.

124
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: baz danych, zautomatyzowanych systemów wytwarzania,
szeregowania zadań.
Literatura podstawowa
1. Landvater D.V.,Gray D.D.: MRP II Standard System, Olivier Wright Publications, 1989.
2. Orlicky J.: Planowanie Potrzeb Materiałowych. PWE. 1981.
3. Wojtasik P.: Systemy sterowania produkcją. Kanban, Warszawa 2000.
4. Wróblewski K.J.: Podstawy sterowania przepływem produkcji. WNT. Warszawa 1993.
5. Jagodziński M., Krystek J.: Zintegrowany system zarządzania przedsiębiorstwem IFS
Applications. (w przygotowaniu)
Literatura uzupełniająca
1. Browne J., Harhen J., Shivnan J.: Production Management System An Integrated
Perspective, Addison Wesley, 1996.
2. Brzeziński M.: Organizacja i sterowanie produkcją. Projektowanie systemów
produkcyjnych i procesów sterowania produkcją, Placet, Warszawa, 2002.
3. Goldratt E.M.: Cel. Werbel, Warszawa, 2000.
4. Ptak C.: ERP Tools, Techniques and Applications for Integrating the Supply Chain, CRC
Press LLC, Boca Raton FA, 2004.
5. Scheer A.-W.: CIM (Computer Integrated Manufacturing) – Towards the Factory of the
Future, Springer-Verlag, 1994.
PRODUCTION CONTROL
Objective
The objective of the course is to provide the students with actual knowledge of the
integrated management systems. This knowledge could be used by student in participation in
the comercial implementation of the integrated management systems in polish and foreign
enterprices. Particular attention is paid to some of the algorithms of planning and controlling
the production processes: MRP, CRP, SFC, MPS, JIT, Kanban and NHP follow-up
production control in industrial companies.
Description
Control in the computer integrated manufacturing (CIM) systems; Scheer’s Y model of
functional structure of CIM systems; business process modelling; functional structure of MRP
II systems ; MRP II standard according to APICS; bill of material (BOM); material
requirements planning (MRP) algorithm; shop orders scheduling in the Shop Floor Control
(SFC) subsystem; capacity requirements planning (CRP) algorithm; master production
scheduling (MPS) algorithm; repetitive production; the dynamic lot-size problem;
synchronized manufacturing processes; work-in-process inventory; the Kanban algorithm;
Just in Time (JIT) method; Theory of Constraints (TOC) the OPT (Optimized Production
Technology) method.
Keywords
Integrated management system; business process modelling; computer integrated
manufacturing; data structures; Kanban; JIT; MRP; CRP; NHP;OPT; TOC.

125
ELEMENTY PRAWA
Przedmiot obowiązkowy
Prowadzący Dr Piotr Stec
(piotr.stec@polsl.pl)
Rozkład Semestr
7
W
2
Ćw
–
Lab
–
Proj
–
Sem
Egz
–
ECTS
1
Cel
Celem przedmiotu jest zapoznanie studentów z podstawowymi pojęciami
prawa prywatnego i handlowego niezbędnymi w codziennej pracy inżyniera.
Nacisk położono na kwestie praktyczne, takie jak: wybór formy
organizacyjnoprawnej działalnosci gospodarczej, prawo zobowiązań i ochronę
własności przemysłowej
.
Opis Wykład rozpoczyna krótkie wprowadzenie w prawoznawstwo, wyjaśnienie
podstawowych pojęć prawniczych, niezbędnych do zrozumienia dalszych
zajęć. Następnie studenci zostaną zapoznani z najważniejszymi uczestnikami
obrotu gospodarczego: osobami fizycznymi, prawnymi i ułomnymi osobami
prawnymi. Omówione zostaną kryteria wyboru formy organizacyjnoprawnej
dla prowadzonej działalności gospodarczej. Kolejna część wykładu będzie
poświęcona prawu zobowiązań. Przedstawione zostaną tu zasady zawierania i
wykonywania umów, odpowiedzialność za czyn niedozwolony oraz
odpowiedzialności z tytułu niewykonania i nienależytego wykonania
zobowiązania. Następnie omówione zostaną najważniejsze umowy obrotu
gospodarczego, m. in. sprzedaż, dzieło, zlecenie, leasing, najem i dzierżawa.
Ostatni moduł wykładowy będzie poświęcony ochronie własności
intelektualnej i obejmie zarówno elementy prawa autorskiego, jak i własności
przemysłowej.
Słowa
kluczowe
Prawo; prawo cywilne; prawo prywatne gospodarcze; spółki; umowy;
własność intelektualna; odpowiedzialność cywilna.
Wykład
1. Podstawowe pojęcia prawnicze. Prawo, źródła prawa, prawo a moralność, obowiązywanie
prawa, hierarchia aktów prawnych.
2. Podmioty prawa cywilnego – osoby fizyczne, prawne i niepełne osoby prawne.
Przedsiębiorcy i konsumenci. Oznaczenia odróżniające przedsiębiorców i ochrona dóbr
osobistych.
3. Wybór formy prowadzenia działalności gospodarczej I:. Przedsiębiorca jednoosobowy i
wspólnicy spółki cywilnej. Osobowe spółki handlowe – jawna, partnerska, komandytowa,
komandytowo – akcyjna.
4. Wybór formy prowadzenia działalności gospodarczej II. Spółki kapitałowe – z ogr.
odpowiedzialnością i akcyjne. Pozostali przedsiębiorcy. Przekształcenia spółek.
5. Zobowiązania – podstawowe pojęcia. Źródła zobowiązań. Wielość wierzycieli i
dłużników.
6. Zobowiązania kontraktowe. Pojęcie umowy. Zawarcie umowy. Kształtowanie treści
umowy. Forma umowy. Wadliwość umów.
7. Czyny niedozwolone. Bezpodstawne wzbogacenie. Wykonanie zobowiązań i skutki ich
niewykonania.
8. Umowy o przeniesienie własności rzeczy lub praw. Sprzedaż, zamiana, darowizna.

126
Program studiów I-ego stopnia na kierunku automatyka i robotyka
9. Umowy o korzystanie z rzeczy cudzej. Najem, dzierżawa, leasing, pożyczka i użyczenie.
10. Umowy o świadczenie usług. Dzieło, zlecenie, komis, agencja.
11. Podstawy prawa własności intelektualnej. Prawo autorskie. Przedmiot, podmiot i treść
prawa autorskiego.
12. Prawo własności przemysłowej – wynalazki, wzory użytkowe i przemysłowe, topografie
układów scalonych.
13. Ochrona programów komputerowych.
14. Znaki towarowe i oznaczenia geograficzne.
15. Obrót własnością intelektualną. Przeniesienie praw, licencje komercyjne i open source.
Metody nauczania
Wykład jest prowadzony metodą tradycyjną. Omawiane są po kolei pojęcia prawnicze w
sposób, umożliwiający studentowi zrozumienie zasad funkcjonowania prawnego otoczenia
biznesu.
Istotnym składnikiem zajęć jest pokazanie, jak konkretne instytucje prawne są stosowane
w praktyce. Służy temu ilustrowanie wykładu licznymi przykładami z orzecznictwa i praktyki
sądowej.
Na wykładzie stosowana jest tzw. metoda sokratejska. Oznacza to, że studenci dostają
szanse zaprezentowania własnych poglądów i krytycznej oceny analizowanych przepisów.
Tym samym rola studenta nie ogranicza się tylko do obecnosci na wykładzie. Przeciwnie,
staje się on aktywnym ich uczestnikiem.
Warunki zaliczenia
Przedmiot kończy się zaliczeniem. Stosownie do postanowień regulaminu studiów sposób
i forma zaliczenia są każdorazowo konsultowane ze studentami. Studentom proponuje się
klasyczny test, albo rozwiązanie zestawu zadań, względnie opracowanie praktyczne
polegające np. na przygotowaniu dokumentów potrzebnych do zarejestrowania spółki albo
zgłoszenia znaku towarowego.
Wstępne przygotowanie
Przedmiot nie wymaga szczególnego przygotowania.
Literatura podstawowa
1. E. Knosala, M. Baron – Wiaterek (red): Elementy prawa dla studentów zarządzania, Wyd.
PolSl., Gliwice 2005.
2. P. Horosz, J. R. Antoniuk: Prawne podstawy przedsiębiorczości, Wolters Kluwer, Kraków
2007.
Literatura uzupełniająca
1. P. Podrecki (red.): Prawo Internetu, Warszawa 2007.
INTRODUCTION TO LAW
Objective
The aim of the course is to familiarize students .with legal environment of business.
Description
This course is divided into four modules of different weight. Module one is a short and
concise overview of Polish legal system. Main themes: nature of law, structure of legal
norms, sources of law, courts, tribunals and officers of law. Module two deals with law of
persons and choice of business form. Main themes: natural, legal and imperfect legal persons.
Sole trader and unincorporated trade association. Partnerships and corporations. Corporate
governance. Choice of business form and business name. Module three covers law of
obligations. Main themes: Obligations in general. Formation of contract. Execution and
transformation of contract. Torts. Liability in tort and in contract. Law of sales, agency and
leases. Finally, module four is an intellectual property primer. Main themes: copyright basics.

127
Performers rights. Patents, designs and utility models. Trademarks and unfair competition.
Protection of computer software.
Keywords
Law; civil law; commercial and corporate law; companies law; contracts; intellectual
property; civil liability.
128
Program studiów I-ego stopnia na kierunku automatyka i robotyka
EKONOMIKA PRZEDSIĘBIORSTW
Przedmiot obowiązkowy
Prowadzący Dr Mariusz Zieliński
(mariusz.zielinski@polsl.pl)
Rozkład Semestr
7
W
1
Ćw
–
Lab
–
Proj
–
Sem
1
Egz
–
ECTS
2
Cel
Celem przedmiotu jest zaprezentowanie funkcjonowania przedsiębiorstw
działających w różnych formach organizacyjnych. Omówione zostaną takie
zagadnienia jak: istota przedsiębiorstwa (jego cele, funkcje), koszty jego
działalności gospodarczej; zagadnienia działalności finansowej, marketingowej,
gospodarowania zasobami pracy, organizacji produkcji, gospodarowania
zasobami produkcyjnymi, inwestycji i postępu technicznego.
Opis Przedmiotem
wykładu jest mikroekonomia i rachunkowość. W obszarze
mikroekonomii wykład przedstawia: krzywą popytu, krzywą podaży,
równowagę rynkową i analizę kosztów (kosztów przeciętnych, krańcowych,
stałych i zmiennych). W obszarze rachunkowości wykład przedstawia: bilans
przedsiębiorstwa, rachunek dochodów i wydatków i elementy analizy
finansowej. Przedmiotem zajęć projektowych dla studentów jest zarządzanie.
Studenci będą przygotowywać główne części biznes planu dla nowego
przedsiębiorstwa (plan marketingowy, produkcyjny, zatrudnienia i finansowy).
Słowa
kluczowe
Przedsiębiorstwo; mikroekonomia; rachunkowość; zarządzanie; koszty; popyt
i podaż; dochody i wydatki; plan biznesowy.
Wykład
Wykład poświęcony jest problematyce mikroekonomii oraz elementom zarządzania
finansami przedsiębiorstwa i rachunkowości. Wykład podzielony jest na piętnaście tematów
merytorycznych, na ostatnim wykładzie zostanie przeprowadzony test sprawdzający
opanowanie materiału prezentowanego w czasie wykładów. Tematyka wykładów obejmuje:
1. Istota przedsiębiorstwa. Charakter działalności gospodarczej. Przedsiębiorstwo
z perspektywy mikroekonomicznej.
2. Pojęcie przychodów i kosztów. Zysk jako cel ekonomiczny. Zysk jako źródło
finansowania celów rozwojowych.
3. Czynniki wpływające na popyt. Elastyczność cenowa popytu. Elastyczność mieszana
popytu. Elastyczność dochodowa popytu.
4. Czynniki wpływające na podaż. Elastyczność cenowa podaży.
5. Równowaga rynkowa. Wpływ struktury rynkowej na równoważenie rynku.
6. Równowaga rynkowa w krótkim i długim okresie. Konkurencja doskonała. Cechy rynku
doskonale konkurencyjnego.
7. Monopol. Równowaga w warunkach monopolu. Konkurencja monopolistyczna.
Funkcjonowanie rynku w warunkach oligopolu.
8. Analiza kosztów przedsiębiorstwa. Koszty stałe i koszty zmienne. Koszty przeciętne i
koszty krańcowe.
9. Podstawy finansów przedsiębiorstwa. Podstawowe pojęcia związane z finansami
przedsiębiorstw.
10. Podstawowe sprawozdania finansowe. Bilans przedsiębiorstwa. Rachunek zysków i strat.
11. Podstawowe elementy analizy finansowej. Zakres i wykorzystanie analizy wskaźnikowej.

129
12. Działalność marketingowa przedsiębiorstwa. Analiza otoczenia przesiębiorstwa, plan
marketingowy.
13. Marketing- mix. Produkt, cena, dystrybucja i promocja w ujęciu marketingowym.
14. Gospodarowanie zasobami pracy. Podstawowe elementy procesu kadrowego.
15. Pozyskiwanie personelu. Rozwój personelu. Motywowanie.
Zajęcia projektowe
Zajęcia projektowe poświęcone są problematyce zarządzania przedsiębiorstwem. Są
podzielone na siedem tematów merytorycznych, ostatnie zajęcia są poświęcone ocenie
projektów. Tematyka zajęć obejmuje:
1. Pojęcie, funkcje i obszary zarządzania
2. Struktura organizacyjna i analiza strategiczna otoczenia
3. Struktura i funkcje planu biznesowego
4. Plan marketingowy
5. Plan produkcji
6. Plan zatrudnienia
7. Plan finansowy
8. Zajęcia zaliczeniowe
Metody nauczania
Wykład jest prowadzony metodą tradycyjną, ilustrowany slajdami.
Zajęcia projektowe odbywa się w
sekcjach dwu- lub trzyosobowych. Studenci
opracowywują podstawowe elementy planu biznesowego dla nowo tworzonego,
wymyślonego przez siebie przedsiębiorstwa.
Warunki zaliczenia
Warunkiem zaliczenia wykładu jest uzyskanie pozytywnej oceny z testu jednokrotnego
wyboru, obejmującego zagadnienia prezentowane na wykładzie.
Warunkiem zaliczenia zajęć projektowych, jest pozytywna ocena przez prowadzącego
zajęcia projektu przygotowanego przez studentów.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: podstawowych wiadomości z zakresu prawa gospodarczego i
prawa pracy.
Literatura podstawowa
1. D. Begg, S. Fischer, R. Dornbusch: Mikroekonomia, PWE, Warszawa 2007.
2. E. Czarny: Mikroekonomia, PWE, Warszawa 2006.
3. J. Duraj: Podstawy ekonomiki przedsiębiorstwa, PWE, Warszawa 2004.
4. E. Filar, J. Skrzypek: Biznes plan, Wyd. Poltext, Warszawa 1997.
5. R. Griffin: Podstawy zarządzania organizacjami, PWN, Warszawa 1996.
6. R. Oldcorn: Rachunkowość dla menedżerów, PWE, Warszawa 1994.
Literatura uzupełniająca
1. M. Sierpińska, T. Jachna: Ocena przedsiębiorstwa według standardów światowych, PWN,
Warszawa 1994
2. G. Gierszewska, M. Romanowska: Analiza strategiczna przedsiębiorstwa, PWE,
Warszawa 1996
ECONOMY OF COMPANIES
Objective
The purpose of the subject is to present the functioning of the companies that have their
activity in various organisational forms. There will be objects talked
over like: the essence of the company (its aims, functions), thecosts of its market activity,

130
Program studiów I-ego stopnia na kierunku automatyka i robotyka
financial, marketing and man-management activity, organising the
production, dealing with production resources, investments and technical advancement.
Description
The objects of lecture are micro-economy and accounting. In micro-economy area lecture
presents: demand curve, supply curve, economic equilibrium and analysis of costs (average,
marginal, standing and variable costs). In accounting area lecture presents: account of assets
and liabilities, income and expenditure account, elements of financial analysis.
The object of students’ project is management. Students will be preparing the main parts of
business plan for a new company (marketing, production, employment and finacial plan).
Keywords
Company, micro-economy, accounting, management, costs, demand and supply, income
and expenditure, business plan.
131
KOMPUTEROWE WSPOMAGANIE PODEJMOWANIA DECYZJII
Przedmiot obieralny
Prowadzący Prof. dr hab. inż. Andrzej Świerniak
(andrzej.swierniak@polsl.pl)
Rozkład Semestr
6
W
1
Ćw
–
Lab
1
Proj
–
Sem
–
Egz
–
ECTS
2
Cel Celem
wykładu jest zapoznanie studentów studiów I stopnia z podstawowymi
typami procesów decyzyjnych i ich modelami a także zastosowaniem teorii
gier do rozwiązywania takich procesów. Celem laboratoriów jest
przedstawienie praktycznych algorytmów poszukiwania równowagi
w procesach decyzyjnych.
Opis
Przykłady problemów decyzyjnych, problemy statyczne i dynamiczne,
dyskretne i ciągłe, kooperacyjne i niekooperacyjne, punkty równowagi
w problemach decyzyjnych, startegie a decyzje, postacie normalne, drzewa
decyzyjne, struktury procesów decyzyjnych, wykorzystanie w systemach
sterowania
Słowa
kluczowe
Gry i decyzje; gry kooperacyjne; sytuacje konfliktowe; problemy o sumie
zerrowej; problemy o sumie niezerowej; równowaga siodłowa; Nasha;
Stackelberga.
Wykład
Wprowadzenie, przykłady procesów decyzyjnych, sytuacje konfliktowe, podział procesów
decyzyjnych, problemy statyczne i dynamiczne, problemy ciągłe i dyskretne, teoria
użyteczności, teoria gier, postacie normalne i ekstensywne
Problemy o sumie zerowej, metody macierzowe, strategie bezpieczne, równowaga
siodłowa, wymienialność punktów równowagi, randomizacja decyzji, strategie mieszane,
wykorzystanie algorytmu simplex, drzewa decyzyjne
Problemy wieloetapowe, wyznaczanie równowagi w drzewach decyzyjnych jedno-
i wieloetapowych, struktury informacuyjne, gry przeciw naturze, strategie mieszane
i behawioralne, metody przeszukiwania drzew decyzyjnych
Problemy o sumie niezerowej, równowaga niekooperacyjna, znajdowanie punktów
równowagi Nasha, problemy zespołów decyzyjnych, strategie mieszane i ich znajdowanie,
problemy hierarchiczne, równowaga von Stackelberga, poszukiwanie strategii Nasha i von
Stackelberga na drzewach decyzyjnych, informacja zagnieżdżona i jej wykorzystanie
Problemy decyzyjne ciągłe (nieskończone), sformułowanie problemu, stany procesu
decyzyjnego, wieloetapowe problemy decyzyjne, zasada optymalności, przykłady
zastosowania w sterowaniu obiektami dynamicznymi, przykłady struktur informacyjnych,
typy i metody poszukiwania punktów równowagi
Systemy komputerowego wspomagania podejmowania decyzyji, modele niepewności,
reguły decyzyjne, relacje między problemami polioptymalizacyjnymi a problemami teorii gier
i teorią zbiorów rozmytych,
Zajęcia laboratoryjne
1. Tworzenie modeli procesów decyzyjnych.
2. Gry macierzowe o sumie zerowej – strategie czyste i mieszane
3. Gry macierzowe o sumie niezerowej
4. Drzewa decyzyjne i struktury informacyjne

132
Program studiów I-ego stopnia na kierunku automatyka i robotyka
5. Poszukiwanie strategii równowagi w drzewach decyzyjnych
6. Przykładowe systemy wspomagania procesów decyzyjnych
Wyposażenie laboratoryjne
Laboratorium będzie prowadzone w komputerowych laboratoriach wydziałowych, każdy
student będzie wykonywał ćwiczenie indywidualnie.
Metody nauczania
Wykład jest prowadzony tradycyjnie z użyciem tablicy i kredy lub białej talblicy.
Dodatkowo niektóre przykłady i ilustracje np. interpretacji geometrycznych będą
wspomagane środkami multimedialnymi.
Laboratorium odbywa się w salach komputerowych z indywidualnym dostępem każdego
studenta do komputera.
Warunki zaliczenia
Warunkiem zaliczenia laboratorium student jest uzyskanie pozytywnych ocen z kompletu
zaliczonych ćwiczeń, przy czym możliwe jest indywidualne dostosowanie programu ćwiczeń
do zainteresowań i poziomu studenta. Przed przystapieniem do ćwiczenia sprawdzane jest
przygotowanie studenta na podstawie odpowiedniego materiału wykładowego i podręcznika
do laboratorium. Ocena końcowa przedmiotu oprócz oceny z laboratorium obejmuje ocenę
aktywności na wykładach.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie: algebry, zautomatyzowanych systemów wytwarzania, rachunku
prawdopodobieństwa i statystyki
Literatura podstawowa
1. Świerniak A., Podejmowanie decyzji w sytuacjach konfliktowych, Wydawnictwo
Politechniki Śląskiej, Gliwice, 1993.
Literatura uzupełniająca
1. Basar T., Olsder G.J. Dynamic Noncooperative Game Theory, Academic Press, London,
1982
2. Luce R.D., Raiffa H.: Gry i decyzje, PWN, Warszawa, 1967.
3. Mesterton_Gibbons M. An Introduction to Game-Theoretic Modelling, AMS, 2001.
COMPUTER AIDED DECISION MAKING
Goal
The objective of the lecture is to present an introduction to modeling and solving of
decision processes. The methodology is based on the game theoretic approach to decision
making and the role of information structure is discussed.
Description
Introduction to decision making and game theory, types of decision processes, normal and
extensive forms, zero-sum and nonzero-sum processes, multistage decision processes, the role
and use of information structures, decision trees, noncooperative and hierarchical equilibria,
computer aided decision making systems
Keywords
Decision making; game theory; decision trees; information structure.

133
ELEMENTY SYSTEMÓW SCADA
Przedmiot obieralny
Prowadzący Dr
inż. Ryszard Jakuszewski
(ryszard.jakuszewski@polsl.pl)
Rozkład Semestr
6
W
1
Ćw
–
Lab
1
Proj
–
Sem
–
Egz
–
ECTS
2
Cel Umiejętność projektowania i wdrażania komputerowych systemów sterowania
i wizualizacji procesów przemysłowych. Poznanie środowisk i narzędzi
programowych do tworzenia aplikacji przemysłowych w oparciu
o najnowocześniejsze technologie: COM, DCOM, OPC, ODBC, Active X,
VisiconX, ADO, SLC (Soft Logic Control) oraz język programowania VBA.
W ramach przedmiotu także uwzględnia się tworzenie aplikacji sieciowych z
hierarchicznymi systemami zabezpieczeń, alarmowania i z właściwościami
redundantnymi.
Opis
Przedmiot uczy projektowania i wdrażania systemów sterowania w zakładach
przemysłowych. Porusza m.in. następujące tematy: środowisko do tworzenia
aplikacji przemysłowych, narzędzia i metody tworzenia ekranów
synoptycznych, rejestracja historii produkcji z
wykorzystaniem
przemysłowych i relacyjnych baz danych zgodnych z SQL/ODBC, sterowanie
procesami przemysłowymi przy pomocy bloków przemysłowych baz danych
i języka VBA w technologii SLC (Soft Logic Control), oprogramowanie zadań
użytkownika przy pomocy skryptów, komunikacja ze sterownikami PLC,
rozwiązania sieciowe, system zabezpieczeń i ochrony danych.
Słowa
kluczowe
Systemy SCADA; komputerowe systemy sterowania, systemy ochrony,
redundancja, OPC, Active X, COM, DCOM.
Wykład
Wprowadzenie. Architektura i komponenty przykładowego komputerowego systemu
sterowania. Prezentacja rzeczywistych aplikacji sterowania w fabryce samochodów
osobowych, cukrowni, oczyszczalni ścieków, browarze, w hucie metali nieżelaznych oraz
w górnictwie. Grafika komputerowa – tworzenie ekranów synoptycznych. środowisko,
narzędzia i metody tworzenia ekranów procesu technologicznego. Warstwy rysunku.
Schematy kolorów. Pięcio-minutowe demo. Animacja obiektów graficznych. Zarządzanie
systemem okien. Technologia grup zmiennych. Biblioteka gotowych obiektów graficznych.
Pięć rodzajów systemów pomocy. Bazy danych. Przemysłowe bazy danych: bazy systemów
SCADA oraz iHistorian. Bazy dostępne przez ODBC (SQL Server, Oracl, Access, MySQL
itp. Wykorzystanie bloków SQL systemów SCADA i technologii ADO języka VBA.
Sterowanie procesami przemysłowymi przy pomocy bloków bazy danych w technologii SLC
(Soft Logic Control). Narzędzia diagnostyczne.) Excel jako przykład bazy z dostępem
poprzez DDE (Dynamic Data Exchange), EDA (Easy Database Access), FDS (Data System
OCX) oraz obiekt FindObject. Przestrzeń adresowa sterowników PLC (GE Fanuc, Modicon,
Allen Bradley, Simatic) i ich drajwery komunikacyjne w technologii standardowej i OPC.
Technologia Offeset. Proces tworzenia drajwera w oparciu o Microsoft Visual C++. Wykresy
czasowe w czasie rzeczywistym i prezentacja historii procesu na wykresach. Technologia
Visicon X. Narzędzia związane z bazami danych. Harmonogramator – uruchamianie zadań
według zadanego harmonogramu. Edytor skrótów klawiszowych. Receptury.

134
Program studiów I-ego stopnia na kierunku automatyka i robotyka
Wielopoziomowy, sieciowy system zabezpieczeń systemu Windows i aplikacji
przemysłowych SCADA. Wielopoziomowy system haseł i nadawanie uprawnień operatorom.
Kreator odwołań. Alarmy i komunikaty. Pojęcia podstawowe. Architektura systemu
alarmowania i strategia jego wdrażania. Typy alarmów i ich definiowanie, prezentacja,
obsługa, potwierdzanie, przeglądanie, zapis oraz wydruk. Usługi alarmowe. Liczniki
alarmów. Alarmowanie sieciowe. Język VBA w automatyce. Zmienne i ich zakresy
stosowania, obiekty, instrukcje sterujące przebiegiem programu i wbudowane funkcje.
Formatki. Dostęp do baz danych z poziomu języka VBA. Obsługa błędów. Optymalizacja.
Rozwiązania sieciowe. Konfigurowanie systemu sieciowego w architekturze klient/serwer.
Zarządzanie przesyłem danych - centralna nastawnia. Sieciowy system zabezpieczeń.
Sieciowy system archiwizacji danych - iHistorian i prezentacji danych poprzez sieć Internet –
Web Server i Infoagent (wartości bieżące i archiwalne, animowana grafika synoptyczna,
komunikaty informacyjne i alarmowe oraz raporty udostępniane przy pomocy standardowej
przeglądarki internetowej). Alarmowanie sieciowe. Redundancja. Narzędzia diagnostyczne.
Zajęcia laboratoryjne
1. Animacja obiektów graficznych oraz tworzenie, przeglądanie, konserwacja i zarządzanie
prostą przemysłową bazą danych
2. Generatory sygnałów oraz narzędzia i metody tworzenia rysunków
3. Wykresy czasowe w czasie rzeczywistym i prezentacja historii procesu na wykresach
4. Skróty klawiszowe i technologia grup bloków
5. Wielopoziomowy system ochrony oraz alarmy – definiowanie, prezentacja, obsługa,
potwierdzanie, przeglądanie, zapis oraz wydruk
6. Komunikacja ze sterownikami oraz ODBC
Wyposażenie laboratoryjne
Laboratorium wyposażone jest w komputery typu PC, oprogramowanie firmy GE Fanuc
(FIX DMACS, iFIX, Visual Batch, FIX Web Server, Paradym-31), sterowniki PLC (GE
Fanuc, Simatic, Modicon, Allen Bradley) oraz symulatory rzeczywistych obiektów
przemysłowych.
Metody nauczania
Wykład jest ilustrowany aplikacjami przemysłowymi wykonanymi przez autora wykładu.
Pojęcia podstawowe przedstawiane są na przykładach zawartych w aplikacji „Lekcje”, która
zawiera ponad 1000 rysunków. Rysunki te graficznie prezentują w skróconej formie
przedstawiane zagadnienia w celu łatwego ich zapamiętania.
W laboratorium studenci indywidualnie wykonują ćwiczenia, a po ich pomyślnym
wykonaniu otrzymują certyfikat ukończenia kursu programowania systemu wizualizacji i
sterowania procesami przemysłowymi - Proficy HMI/SCADA iFIX - firmy GE Fanuc.
Warunki zaliczenia
Zaliczenie wykładu odbywa się na podstawie dwóch sprawdzianów. Zajęcia laboratoryjne
zaliczane są przez prawidłowe wykonanie wszystkich ćwiczeń, których rozwiązanie
zamieszczone jest w pierwszej pozycji literaturowej autora wykładu.
Wstępne przygotowanie
Zakłada się, że przed rozpoczęciem nauki niniejszego przedmiotu student posiada
przygotowanie w zakresie obsługi komputera, zapoznał się przynajmniej z jednym z języków
programowania wysokiego poziomu oraz opanował podstawy relacyjnych baz danych i sieci
komputerowych.
Literatura podstawowa
15. R.Jakuszewski, “Programowanie Systemów SCADA – Proficy HMI/SCADA iFIX”,
Wydawnictwo Pracowni Komputerowej Jacka Skalmierskiego, Gliwice 2006.

135
Literatura uzupełniająca
1. Dokumentacja techniczna w języku polskim do pakietu programów Proficy HMI/SCADA
iFIX w postaci podręczników elektronicznych.
2. T. Sheldon: Wielka Encyklopedia Sieci Komputerowych, Wydawnictwo Robomatic,
Oficyna Wydawnicza READ ME – Drukarnia w Łodzi, 1995 r.
3. Windows XP, Resource Kit, Microsoft.
COMPONENTS OF SCADA SYSTEMS
Objective
This course is designed primarily for students wanting to create advanced control and
process monitoring systems. The students should obtain knowledge of theoretical
fundamentals and of practical methods used in modern SCADA systems and industrial
automation software.
Description
The course teaches basic SCADA and HMI topics like Process Database blocks, driver
configuration, graphic design, data archiving, reporting, alarm strategies, and security. VBA
scripting is covered primarily as a tool for automating tasks for the operator. Students will
also become familiar with some of the tools and concepts available for optimizing and
troubleshooting the software.
Keywords
SCADA Systems; Computer Controled Systems, Security Systems, Redundancy, OPC,
Active X, COM, DCOM.
Document Outline
- SPIS TREŚCI
- STUDIA NA KIERUNKU AUTOMATYKA I ROBOTYKA
- PROGRAMY PRZEDMIOTÓW
- SOCJOLOGIA
- PROGRAMOWANIE OBLICZEŃ KOMPUTEROWYCH
- ALGEBRA
- ANALIZA MATEMATYCZNA
- FIZYKA
- RACHUNEK PRAWDOPODOBIEŃSTWA I STATYSTYKA MATEMATYCZNA
- PROGRAMOWANIE OBIEKTOWE
- DYNAMIKA UKŁADÓW
- ELEKTROTECHNIKA I ELEKTROMECHANIKA
- MECHANIKA
- METODY OBLICZENIOWE OPTYMALIZACJI
- PODSTAWY ELEKTRONIKI
- BAZY DANYCH
- METODY NUMERYCZNE
- SYSTEMY AUTOMATYCZNEGO WNIOSKOWANIA
- TECHNIKA CYFROWA
- PODSTAWY MIERNICTWA
- SYSTEMY OPERACYJNE
- PODSTAWY AUTOMATYKI
- SYSTEMY MIKROPROCESOROWE
- PODSTAWY CYFROWEGO PRZETWARZANIA SYGNAŁÓW
- TECHNOLOGIE INTERNETOWE
- DYNAMIKA PROCESÓW
- PODSTAWY ROBOTYKI
- MIERNICTWO PRZEMYSŁOWE
- ZAUTOMATYZOWANE SYSTEMY WYTWARZANIA
- PODSTAWY STEROWANIA ROBOTÓW
- SYMULACJA UKŁADÓW STEROWANIA
- PROJEKTOWANIE I PROTOTYPOWANIE DEDYKOWANYCH UKŁADÓW STEROWAN
- PRZETWARZANIE OBRAZÓW CYFROWYCH
- URZĄDZENIA AUTOMATYKI
- STEROWNIKI I SIECI PRZEMYSŁOWE
- METODY SZTUCZNEJ INTELIGENCJI
- STEROWANIE JAKOŚCIĄ
- STEROWANIE PRODUKCJĄ
- ELEMENTY PRAWA
- EKONOMIKA PRZEDSIĘBIORSTW
- KOMPUTEROWE WSPOMAGANIE PODEJMOWANIA DECYZJII
- ELEMENTY SYSTEMÓW SCADA
Wyszukiwarka
Podobne podstrony:
programowanie-zadania na kolo, Automatyka i robotyka air pwr, II SEMESTR, Programowanie w języku C
program studiow na kierunku log w poznaniui, LOGISTYKA, SPEDYCJA, TRANSPORT
materiały na wały, Automatyka i Robotyka studia, 2rok, projekt pmr pkm, Nowy Archiwum WinRARa (ZIP),
MatLab ROZWIĄZANA lista na koło, Automatyka i robotyka air pwr, IV SEMESTR, MATLAB, Matlab zagadnien
poruszane zagadnienia na wykładzie, Automatyka i Robotyka, Semestr 3, Obróbka cieplna i powierzchnio
PKM - opracowania roznych pytan na egzamin 6, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji
sprawozdanie na elektre 1, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
1Strona tytułowa na laborki, Automatyka i Robotyka, Semestr 2, Mechanika, sprawka, sprawozdania, Wyz
FMS laborki itd czyli co na laborkach, Automatyka i Robotyka, Semestr 5, ZMiSW, kolos lab
W 10 proc gotowe sprawko na bettiego, Automatyka i Robotyka, Semestr 4, Wytrzymałość materiałów, Spr
Opracowanie na kolokwium, Automatyka i Robotyka, Semestr 4, Metody sztucznej inteligencji
pytanka na ustny, Automatyka i robotyka air pwr, IV SEMESTR, Podstawy automatyki 2, egzamin
PKM - opracowania roznych pytan na egzamin 3, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji
Deklaracja wyboru specjalności dla kierunku Automatyka i Robotyka, Uniwersytety - Nauka
Studia pierwszego stopnia na kierunku scenografia, pliki, PLIKI
Ramowy program praktyki zawodowej na kierunku FINANSE I RACHUNKOWOŚĆ, IV semstr- studia
Zestawienie bibliograficzne na temat młodzieży i ich aspiracji, Pedagogika, Studia stacjonarne I st
TWORZYWA SZTUCZNE W BUDOWNICTWIE, Materiały pomocnicze do nauki przedmiotu „Materiały budowlan
więcej podobnych podstron