Ćwiczenie D6:
A
LGORYTMY
OBLICZANIA
MODUŁU
WEKTORA
,
PIERWIASTKA
KWADRATOWEGO
I
FUNKCJI
TRYGONOMETRYCZNYCH
PRZY
ZASTOSOWANIU
PROCESORÓW
SYGNAŁOWYCH
TMS320
opracował:
mgr inż. Tadeusz Białoń
Cele ćwiczenia:
–
poznanie sposobów aproksymacji funkcji nieliniowych na
przykładzie funkcji sinus
–
analiza błędów procedur realizujących funkcje nieliniowe na
przykładzie procedur realizujących funkcję sinus
–
doskonalenie umiejętności obliczeniowych w arytmetyce
stałoprzecinkowej
Metody aproksymacji funkcji nieliniowych
Stałoprzecinkowe procesory sygnałowe są zoptymalizowane pod kątem wykonywania podstawowych
operacji arytmetycznych czyli dodawania i mnożenia. Niektóre procesory sygnałowe zawierają
w swojej strukturze dodatkowe urządzenia w sposób sprzętowy ułatwiające obliczanie wartości
funkcji nielinowych takich jak funkcje trygonometryczne czy pierwiastek kwadratowy. W przypadku
braku takich urządzeń w strukturze procesora, wartości funkcji nieliniowych należy obliczać przy
wykorzystaniu tylko operacji mnożenia i dodawania, stosując odpowiednie metody aproksymacji.
Aproksymacja za pomocą szeregu Taylora
Jedną z metod praktycznej realizacji funkcji nieliniowych jest aproksymacja za pomocą szeregu
Taylora, pozwalająca sprowadzić problem obliczania wartości funkcji nieliniowej do obliczania
wartości wielomianu.
Po rozwinięciu funkcji sinus w szereg Taylora w przedziale wartości kątów [0,
π
] radianów
i pominięciu wyrazów stopnia piątego i wyższych otrzymujemy:
sin( x ) = 0,0013 + 0,9826 * x +
+ 0,0544 * x
2
– 0,2338 * x
3
+ 0,0372 * x
4
Powyższy wzór pozwala obliczyć wartość funkcji sinus dla kątów z przedziału [0,
π
]. wartości
funkcji sinus dla katów z przedziału [-
π
, 0] obliczamy korzystając z nieparzystości funkcji sinus:
sin( -x ) = -sin( x )
Wartości dla pozostałych wartości kątów obliczamy korzystając ze wzorów redukcyjnych.
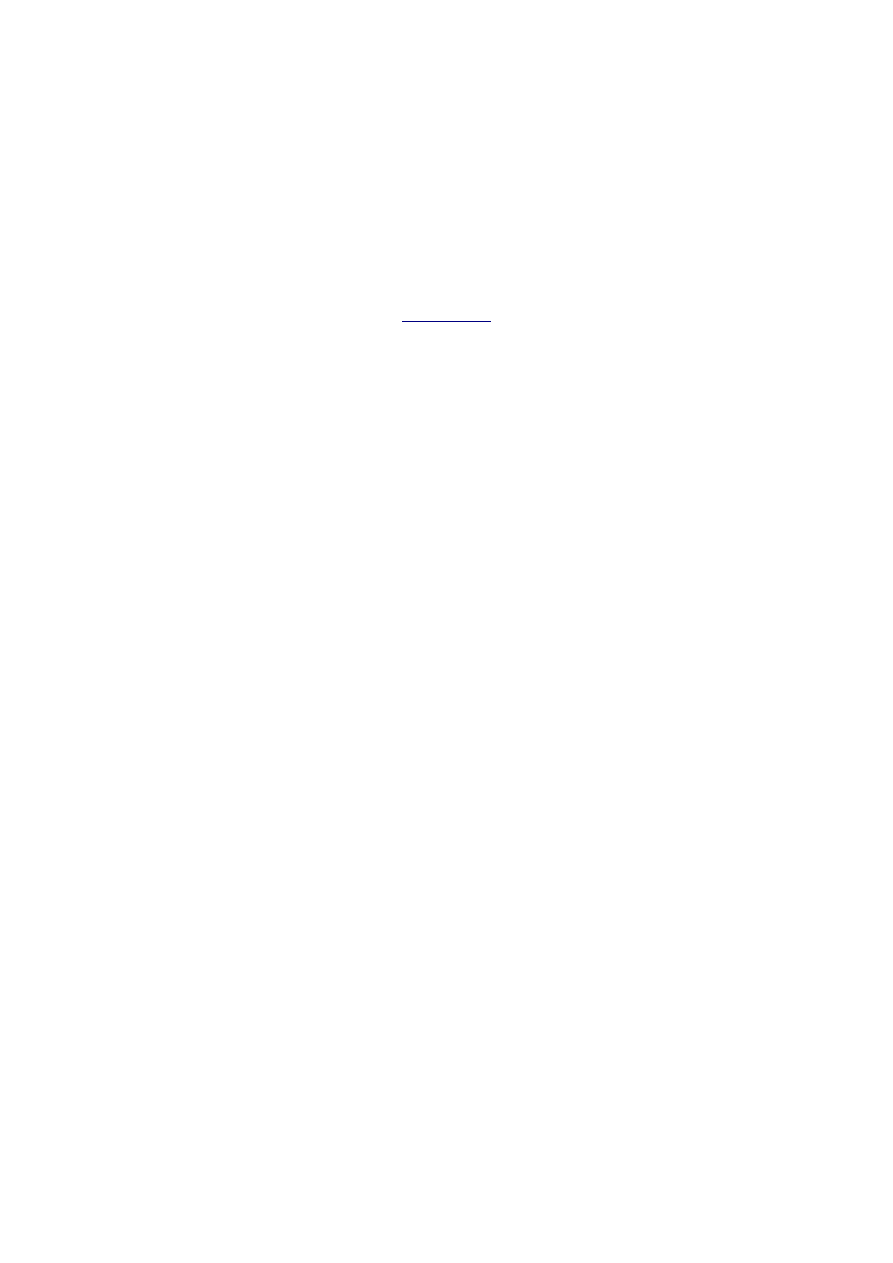
Bezwzględny błąd obliczania funkcji sinus za pomocą wyżej podanej aproksymacji szeregiem Taylora
przedstawia wykres poniżej. Jest to tylko błąd związany z metodą aproksymacji. Rzeczywiste błędy
obliczeniowe gotowej procedury będą większe ze względu na dodatkowe zaokrąglenia wynikające
z ograniczonej precyzji arytmetyki stałoprzecinkowej.
Tablica wartości funkcji i interpolacja
Inną metodą obliczania wartości funkcji nieliniowej jest utworzenie tablicy wartości tej funkcji
i umieszczenie jej w pamięci procesora. Procedura obliczająca wartość funkcji ma wtedy za zadanie
odnalezienie w tablicy wartości odpowiadających podanemu argumentowi, a następnie
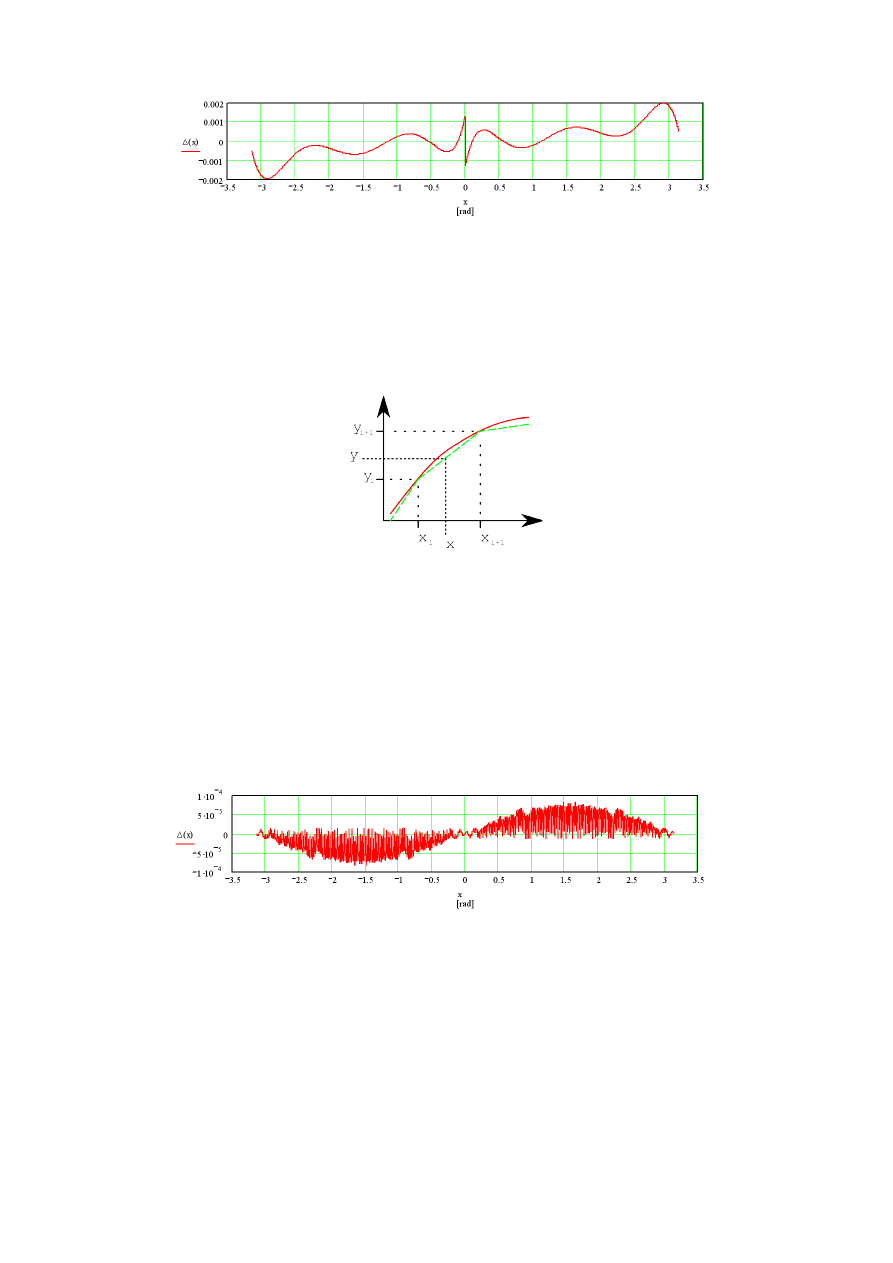
przeprowadzenie odpowiedniej interpolacji, najczęściej liniowej. Ideę interpolacji liniowej
przedstawia poniższy rysunek.
−−−
rzeczywista wartość funkcji,
- - -
wartość interpolowana
Aby obliczyć wartość funkcji dla argumentu x należy odczytać z tablicy dwie wartości sąsiednie x
i
i x
i+1
oraz odpowiadające im wartości funkcji y
i
i y
i+1
, a następnie obliczyć wartość funkcji y ze
wzoru:
y = y
i
+ ( y
i+1
– y
i
) * ( x – x
i
) / ( x
i+1
– x
i
)
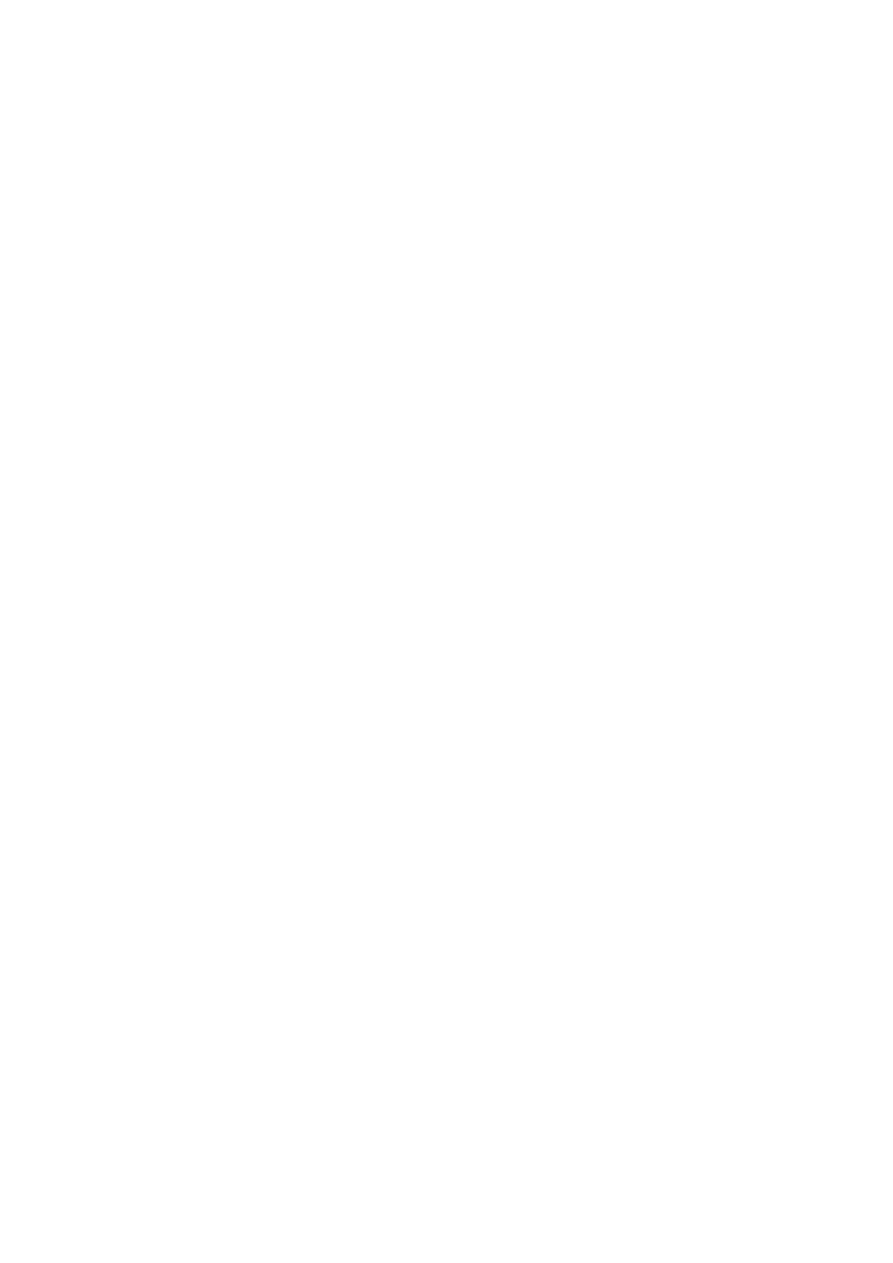
Bezwzględny błąd obliczania funkcji sinus za pomocą wyżej podanej interpolacji liniowej
przedstawia wykres poniżej. Jest to tylko błąd związany z interpolacją. Rzeczywiste błędy
obliczeniowe gotowej procedury będą większe ze względu na dodatkowe zaokrąglenia wynikające
z ograniczonej precyzji arytmetyki stałoprzecinkowej.
Skalowanie wartości i argumentu funkcji
Kolejnym problemem jest skalowanie argumentu i wartości funkcji. Wartości funkcji sinus należą do
przedziału [-1, 1] więc można je przedstawić w 16-bitowym kodzie uzupełnienia do dwóch
i skalowaniu Q15 bez żadnych dodatkowych zabiegów. Dziedziną funkcji sinus w rozpatrywanej
realizacji jest przedział [-
π
,
π
] niedający się zakodować w 16-bitowym skalowaniu Q15.
Przedział kątów wymaga więc przeskalowania polegającego na podzieleniu wszystkich jego wartości
przez
π
. Aby obliczyć wartość funkcji sinus dla przykładowego kąta 0,11
π
, należy jako wartość
wejściową dla badanych procedur podać liczbę 0,11 w 16-bitowym kodzie uzupełnienia do dwóch
i skalowaniu Q15.
Przebieg ćwiczenia
Ćwiczenie polega na uruchamianiu i testowaniu działania gotowego programu realizującego
obydwa opisane powyżej algorytmy obliczania funkcji sinus. Program ten, napisany w asemblerze,
oraz całe środowisko programistyczne zostanie przygotowany przez prowadzącego ćwiczenie.
W trakcie ćwiczenia należy zdjąć charakterystyki wartości funkcji sinus obliczane przez obydwa
algorytmy.
Sprawozdanie z ćwiczenia
Sprawozdanie powinno zawierać wykreślone charakterystyki błędów względnych i bezwzględnych
dla wyników działania obydwu algorytmów. Błędy względne należy obliczać w odniesieniu do
wartości funkcji sinus obliczonych na kalkulatorze lub w dowolnym programie matematycznym
zmiennoprzecinkowym, przy czym wartości te należy brać do obliczeń z dokładnością co najmniej
ośmiu znaczących pozycji dziesiętnych. W sprawozdaniu powinny się również znaleźć wnioski
i spostrzeżenia dotyczące działania i właściwości użytkowych obydwu procedur.
Wyszukiwarka
Podobne podstrony:
D3 instrukcja tb
D6 instrukcja rn
IUwL TB-9 Tampico, Instrukcja użytkowania w locie
wykład 6 instrukcje i informacje zwrotne
Instrumenty rynku kapitałowego VIII
05 Instrukcje warunkoweid 5533 ppt
Instrukcja Konwojowa
2 Instrumenty marketingu mix
Promocja jako instrument marketingowy 1
Promocja jako instrument marketingowy
więcej podobnych podstron