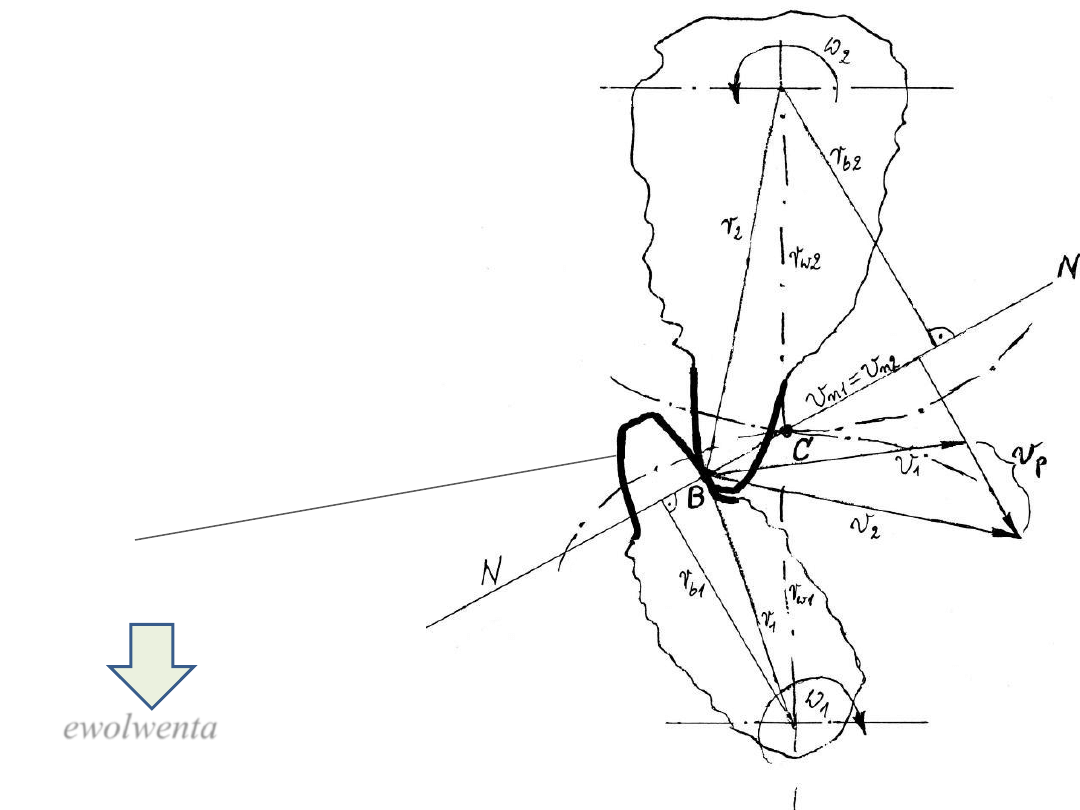
Opis geometrii zazębienia
i kół walcowych
o zębach prostych
C - punkt toczny
B - punkt przyporu
N-N - prosta przyporu
v
p
- prędkość poślizgu zębów
w p.B
zarys zęba (powierzchni
bocznej zęba)
ewolwenta
1
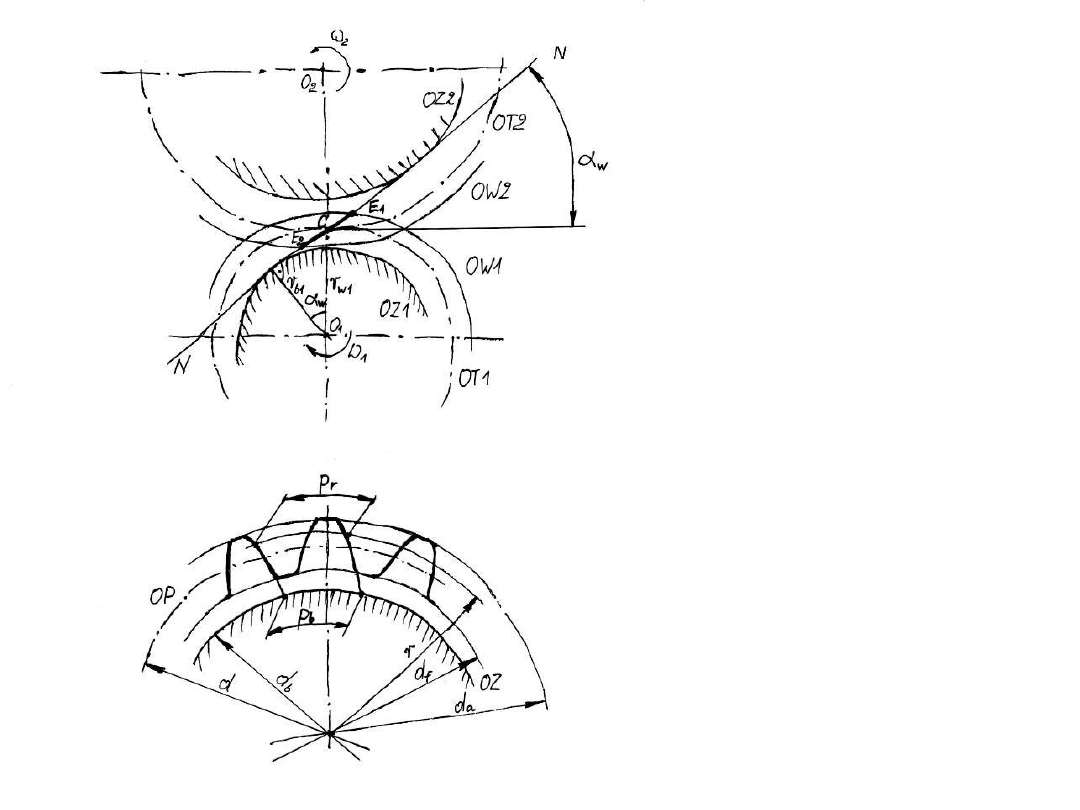
OT – okrąg toczny (d
w
)
OW – okrąg wierzchołkowy
(wierzchołków) (d
a
)
OZ – okrąg zasadniczy (d
b
)
E
2
E
1
- odcinek przyporu
α
w
– toczny kąt przyporu
OP – okrąg podziałowy (d)
p
r
- podziałka (na promieniu r)
p – podziałka nominalna
(na promieniu d/2)
2
3
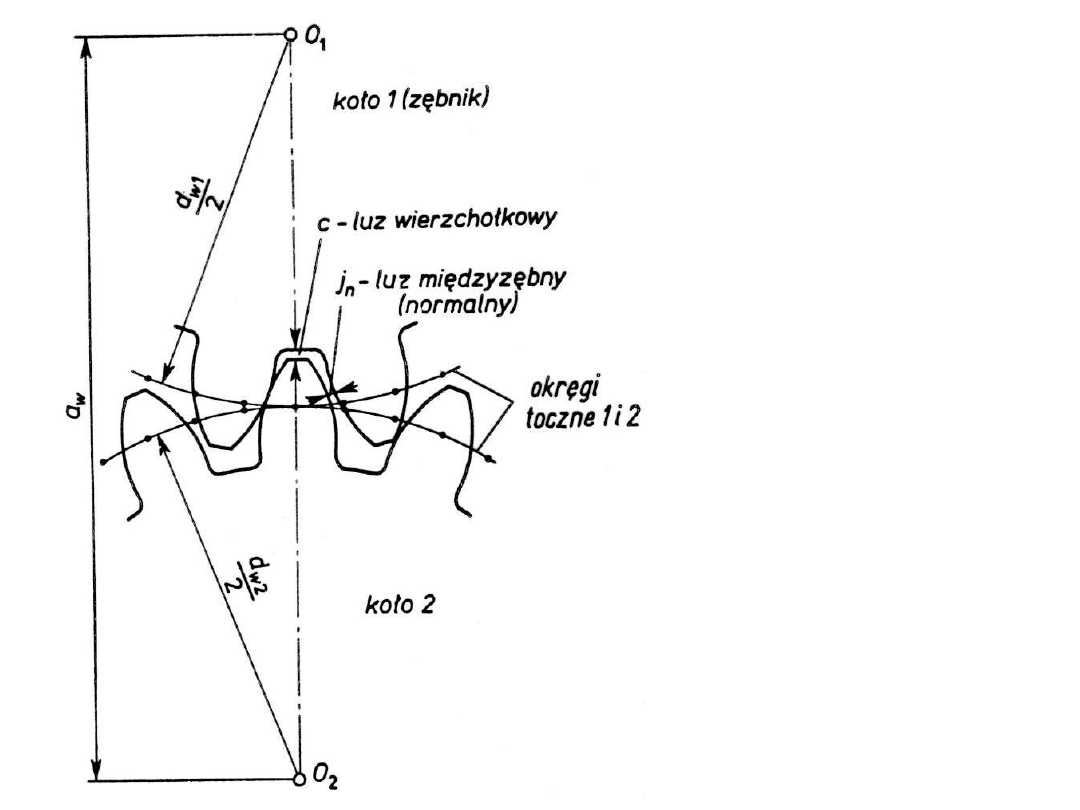
a
w
- odległość osi kół
a - nominalna (podstawowa)
odległość osi kół
a
w
≈ a
c = (0,20 - 0,25) m
m – moduł [mm]
j
n
> 0
4
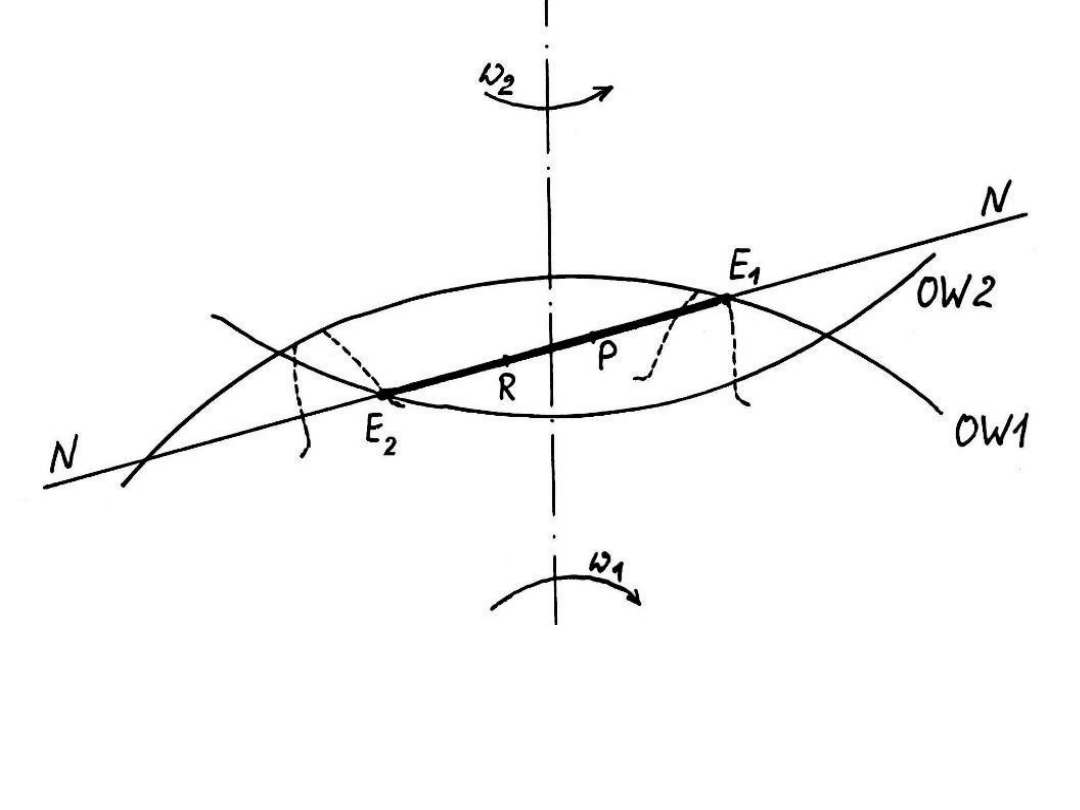
Przemieszczanie się
punktu przyporu (B)
RP – fragment odcinka przyporu, wzdłuż którego
współpracuje ze sobą najmniejsza liczba par zębów
( gdy zęby proste, zwykle – jedna para)
5
α
w
=α
a
w
= a
d
1
d
2
α
w
= α
O
1
O
2
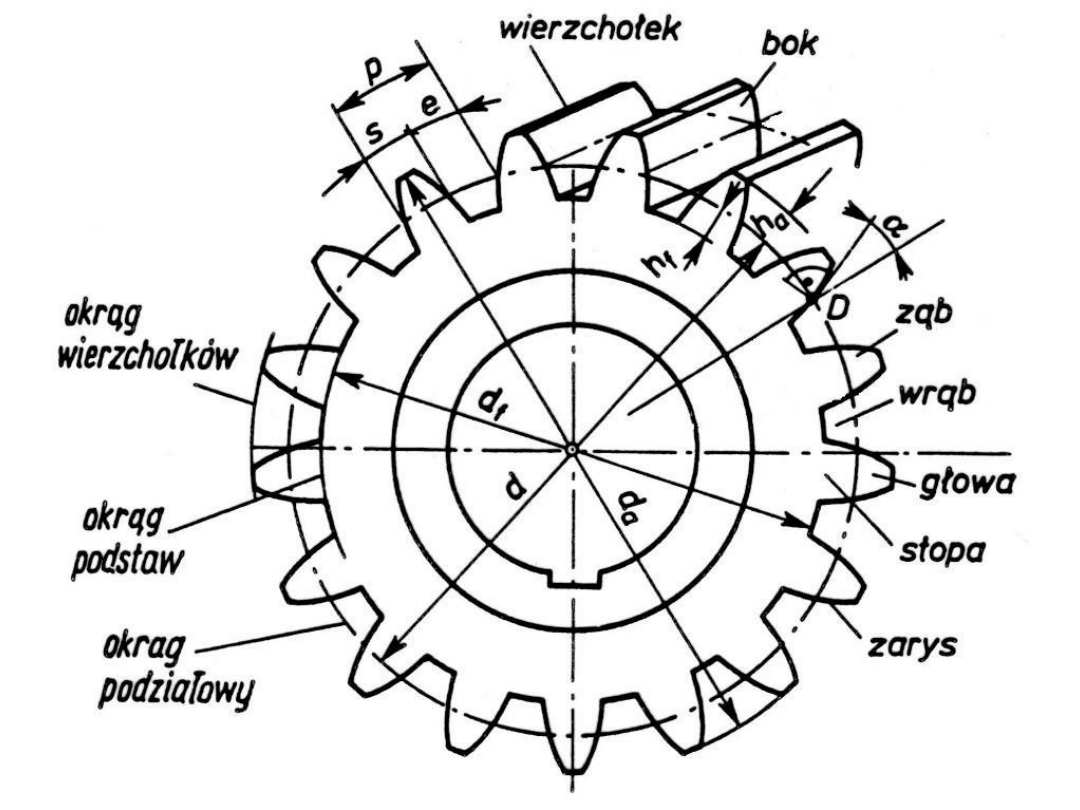
Opis matematyczny geometrii (koła walcowe, zęby proste, x = 0)
d – średnica podziałowa
α – nominalny kąt przyporu
m – moduł [mm] (znormalizowany)
a – podstawowa odległość osi kół
d = m∙z
a = 0,5m(z
1
+ z
2
)
d
a
= d + 2h
a
d
f
= d – 2h
f
h
a
= ym
h
f
= ym + c
y – wsp.wys.zęba
6
Zwykle y = 1 - zęby normalne
Gdy : y > 1 - zęby wysokie
y < 1 - zęby niskie
y ≈ 1
Moduł znormalizowany, np. m = 1,5; 2,0; 2,5;
3,0; 3,5; 4,0;
. . .
Nominalny kąt przyporu
α = 20º
Przełożenie
i =
7

Zadanie
Przekładnia zębata walcowa o zębach prostych powinna mieć prze-
łożenie
i
= 5,2 i odległość osi
a
wym
= 176 mm. Moduł przyjęty
wstępnie
m
= 3 mm. Należy wyznaczyć wymiary poprzeczne kół
oraz odległość ich osi.
Zadanie
Dla przekładni zębatej walcowej o zębach prostych określono :
d
a1
= 66 mm,
d
a2
= 177 mm,
d
b1
= 56,4 mm,
d
b2
= 160,7 mm,
a =
115,5 mm. Należy wyznaczyć graficznie długość odcinka
przyporu.
8
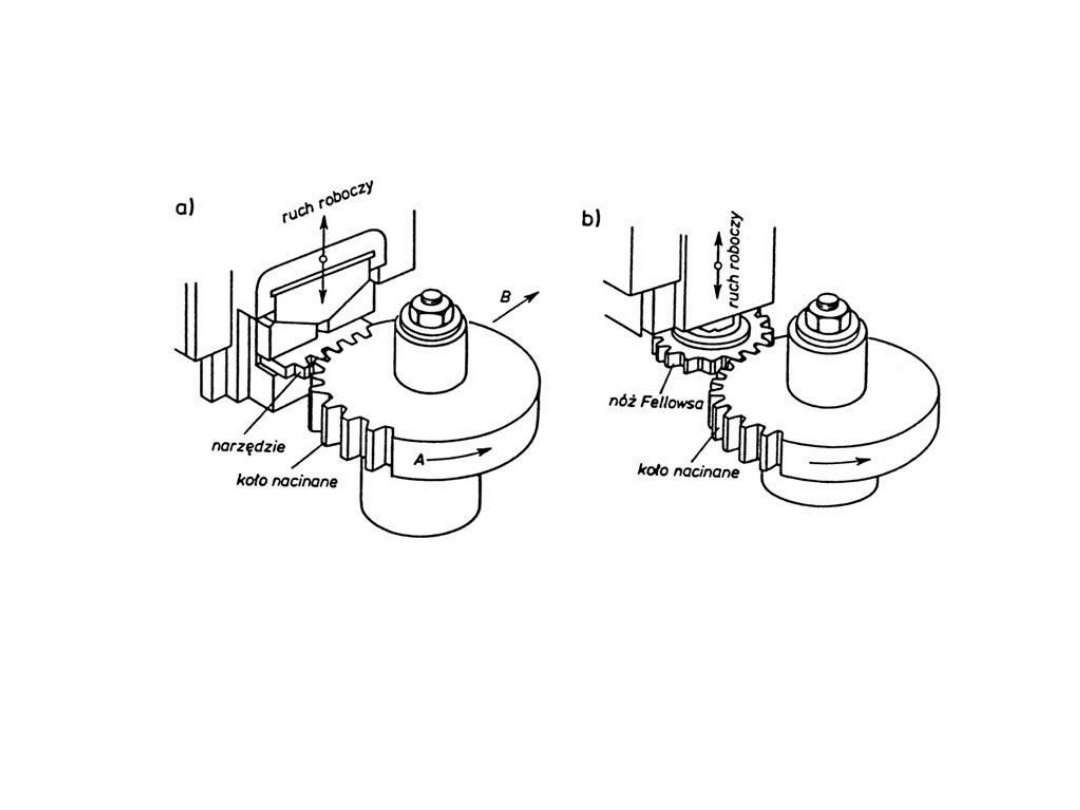
Wykonywanie zębów
Np.
a) metoda Maaga, b) metoda Fellowsa
Inne metody
9
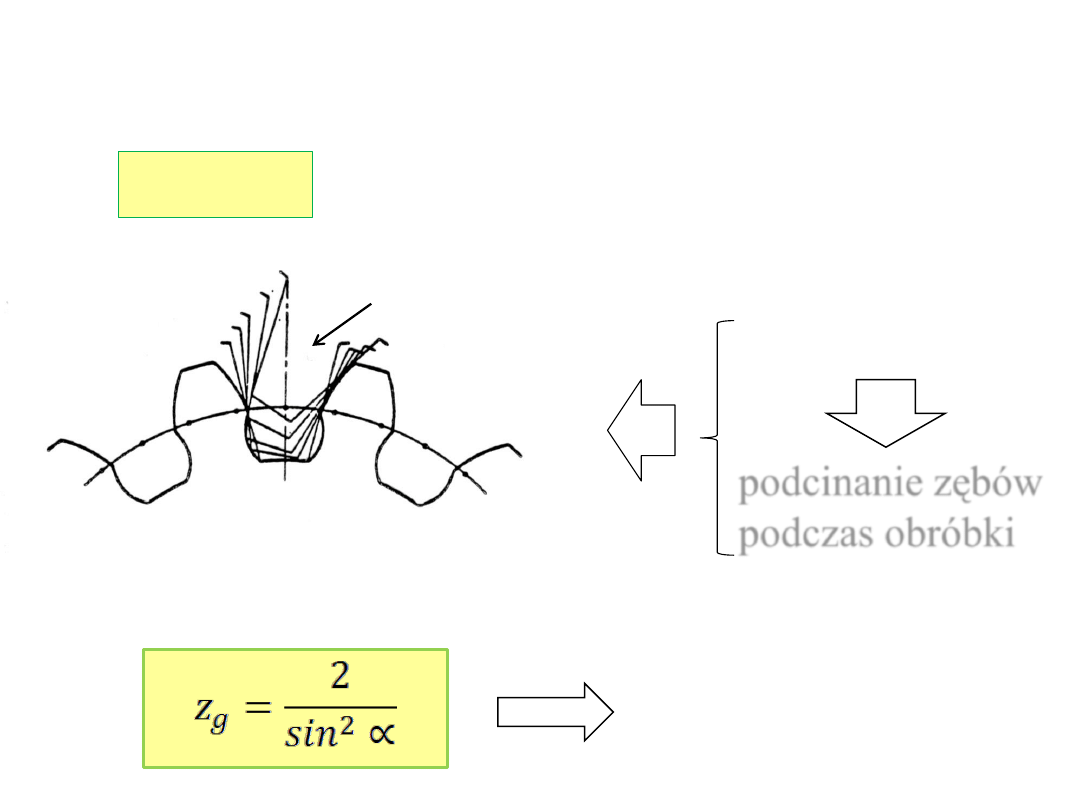
Ze względów technologicznych liczba zębów jest ograni-
czona od dołu. Powinien być spełniony warunek :
z ≥ z
g
Jeśli
z < z
g
podcinanie zębów
podczas obróbki
Dla kół walcowych o zębach prostych normalnych
z
g
=
17
ząb narzędzia
10
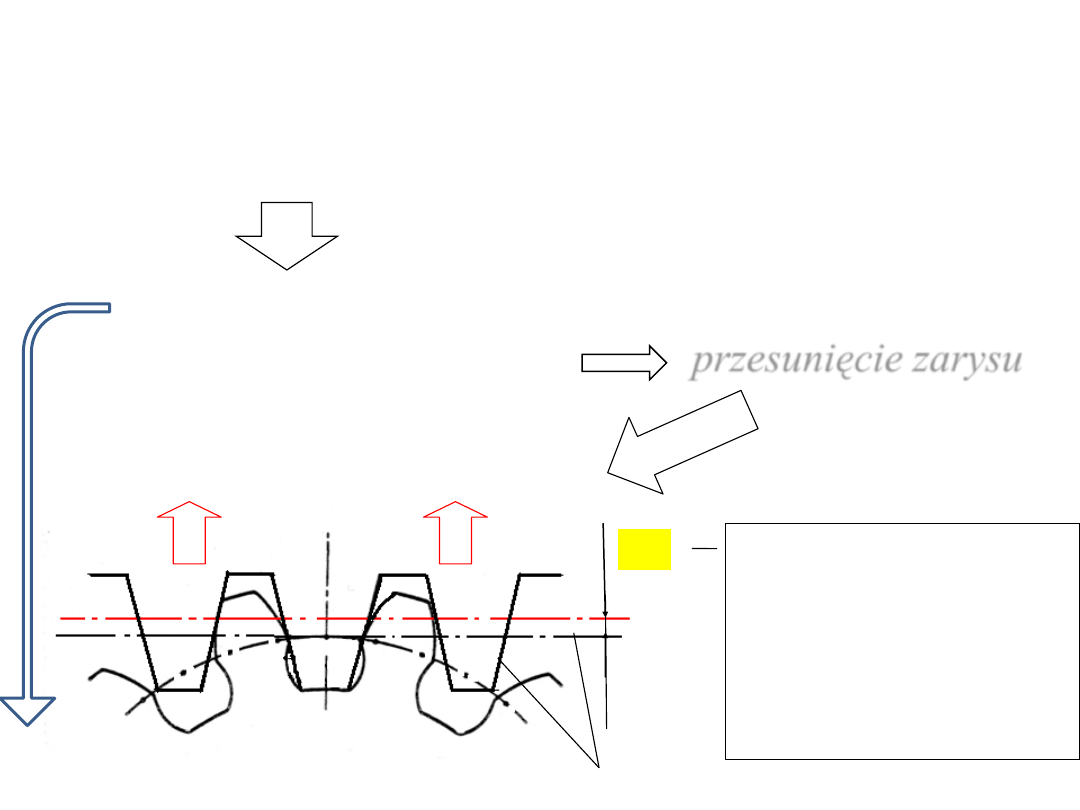
W celu uniknięcia podcinania zębów, gdy
z
<
z
g
• zęby skośne lub
• zabieg technologiczny
przesunięcie zarysu
Wykonywanie zębów z przesunięciem zarysu
x
∙m
narzędzie
odsunięcie narzędzia
x – wsp. przesunięcia
zarysu
Zwykle x < 0,5
wykonywane koło
nominalne położenie narzędzia
11
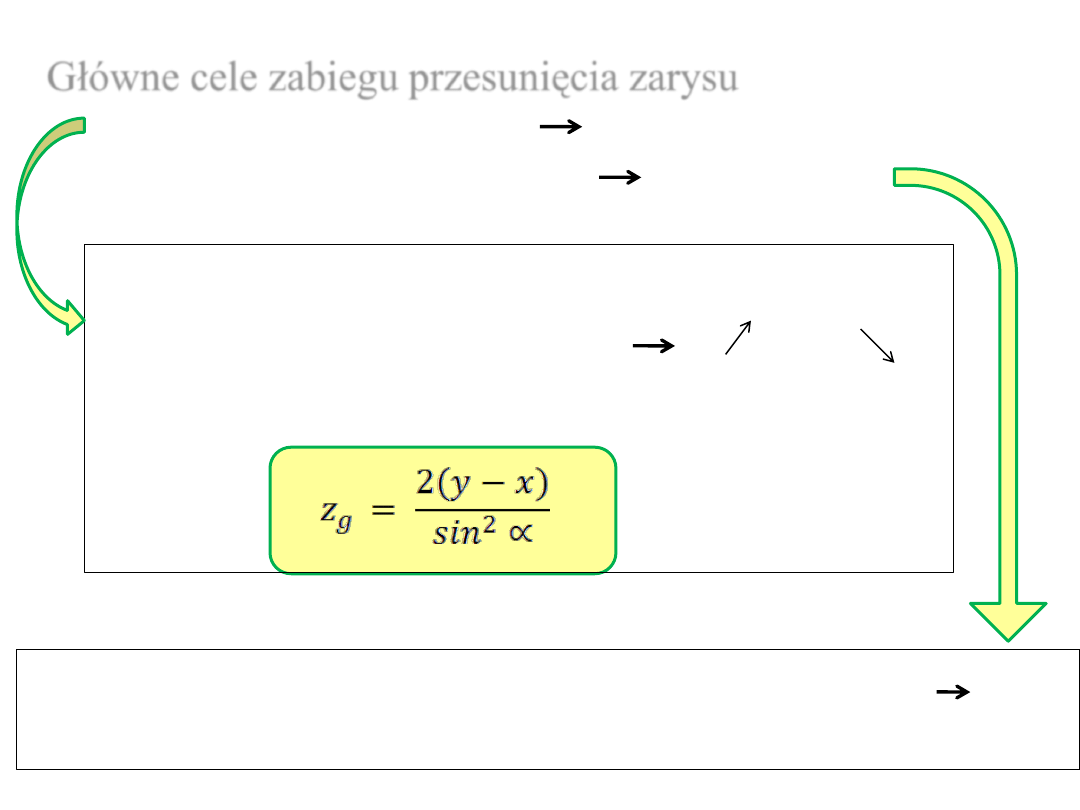
Główne cele zabiegu
przesunięcia zarysu
:
• niepodcinanie zębów ( koło)
• zmiana odległości osi kół ( przekładnia)
możliwość spełnienia warunku
z
>
z
g
przy małej liczbie zębów, gdyż
x ,
to
z
g
,
np. w metodzie Maaga
możliwość dopasowywania odległości osi do potrzeb
a
wym
(w niedużym zakresie)
12
Zabieg
przesunięcia zarysu
zmiana kształtu
i wymiarów zębów
Wymiary koła
• d = d
• d
a
= d + 2h
a
h
a
= (y +
x – k
)m
• d
f
= d – 2h
f
h
f
= (y -
x
)m + c
z projektu zabiegu
przesunięcia zarysu
założone
z obliczeń
wytrzymałościowych
k – współczynnik skrócenia
głowy zęba
13
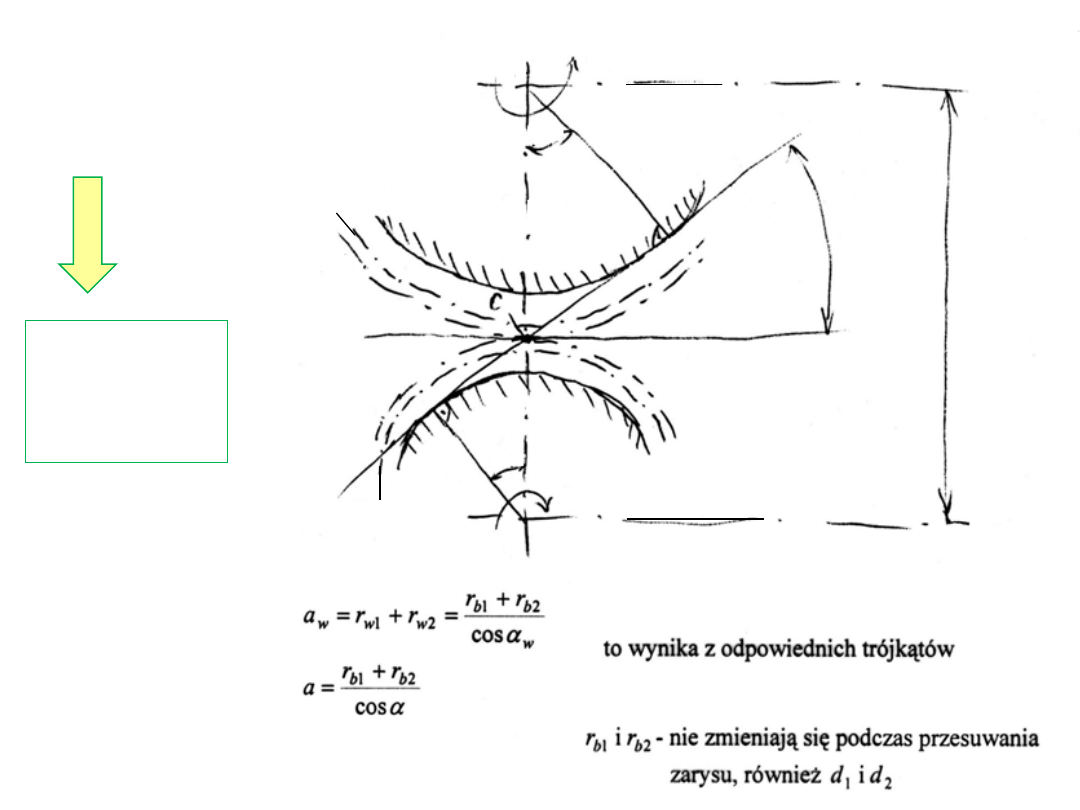
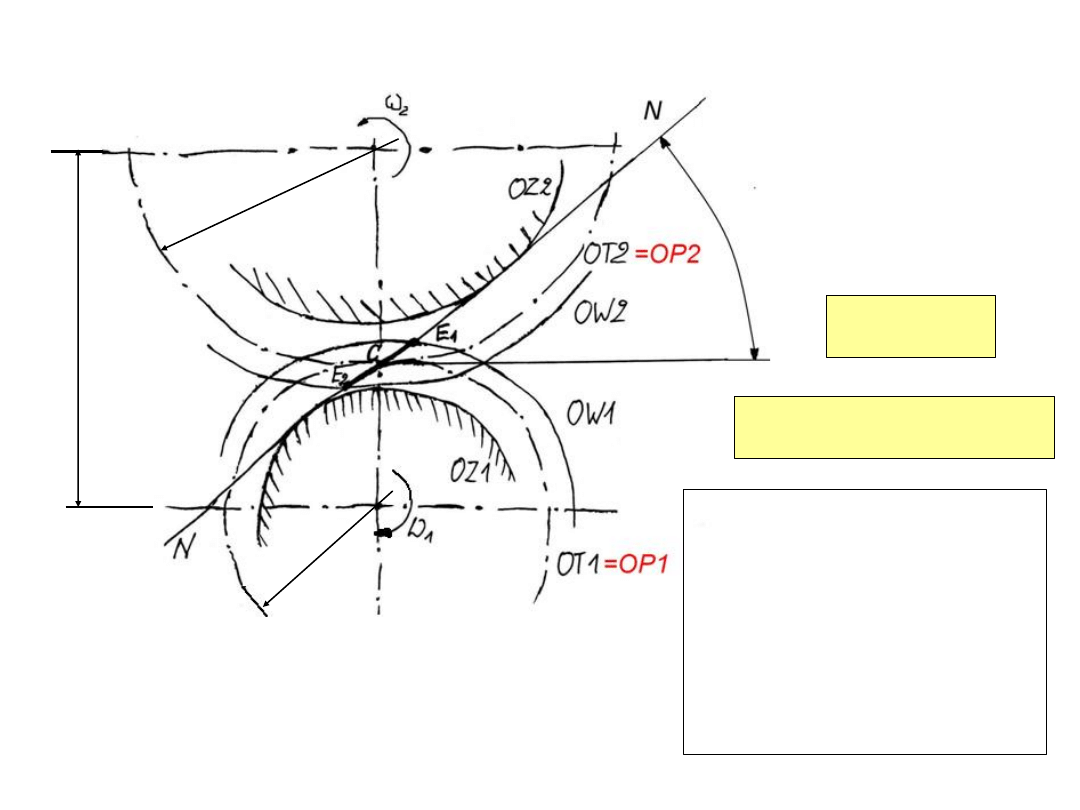
Projekt zabiegu
przesunięcia
zarysu
a
w
α
w
α
w
α
w
OZ2
OP2
OT2
r
b2
r
w2
ω
2
ω
1
O
2
O
1
OT1
OP1
OZ1
r
w1
r
b1
(śr. podział.)
x
1
= ?
x
2
= ?
(k = ?)
14
– k)m
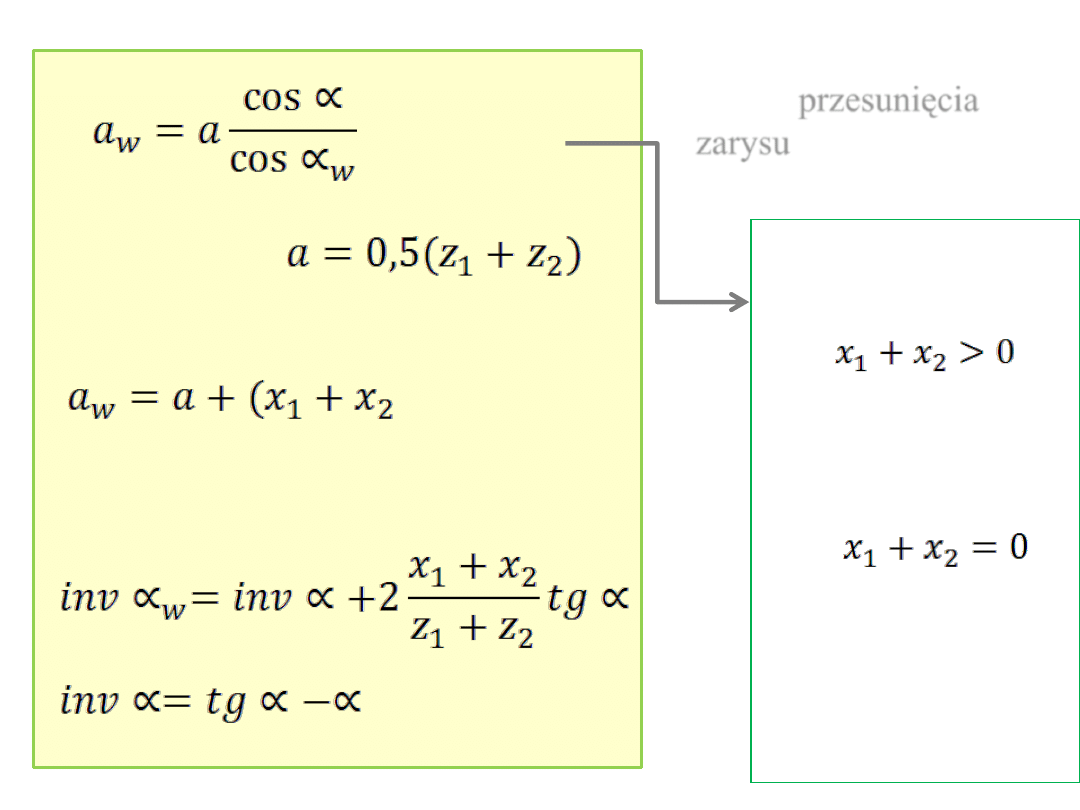
Wyrażenia określające
zabieg
przesunięcia
zarysu
Jeśli
a
w
>
a,
to
α
w
>
α
Jeśli
a
w
=
a,
to
α
w
=
α
(p. rysunek)
15

Zadanie
Jednostopniowa przekładnia zębata jest utworzona z dwóch kół walco-
wych o zębach prostych i danych :
z
1
= 12,
z
2
= 30, m = 3 mm, y = 1,
α
= 20º. Odległość osi powinna wynosić
a
wym
= 63 mm. Wymaga się
również, by zęby były niepodcięte. Należy wyznaczyć potrzebne warto-
ści współczynników
x
1
i
x
2
przesunięcia zarysu zęba.
Uwaga : Z warunków ograniczających technologicznych ze względu na
niezaostrzenie wierzchołków zębów wynika, że powinno być x
1
≤ 0,4;
x
2
≤ 0,6.
16
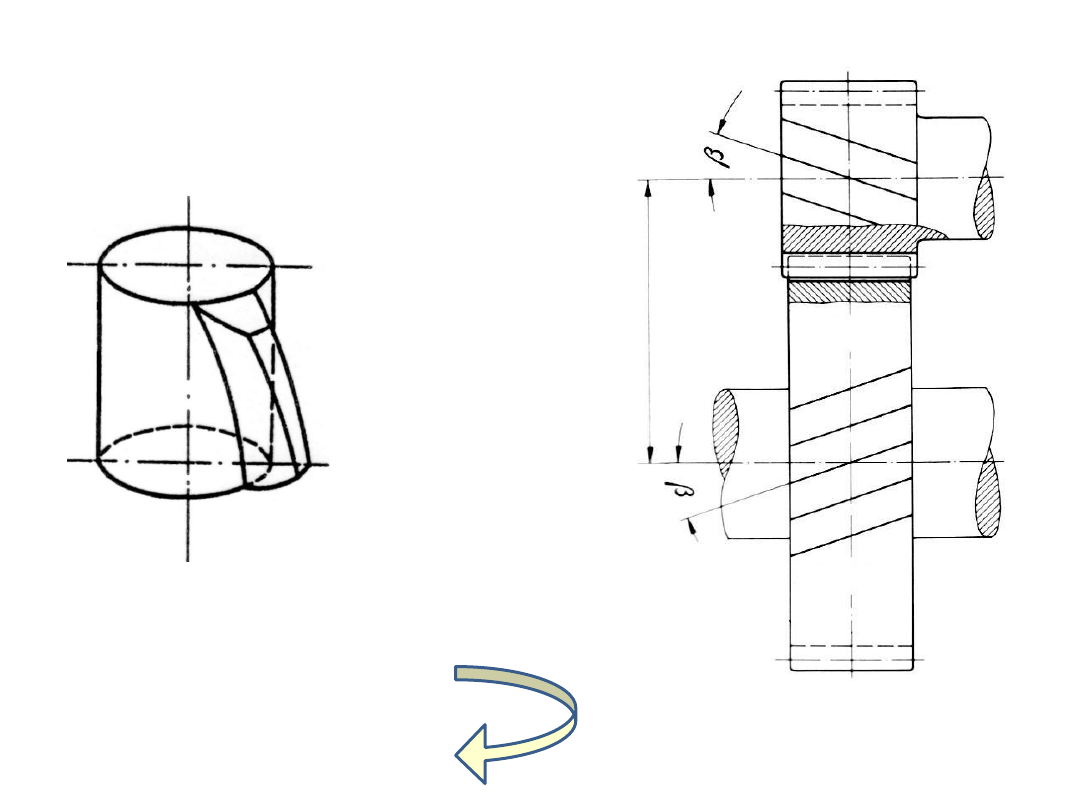
Opis geometrii zazębienia
i kół walcowych
o zębach skośnych
a
w
Zwykle
x
1
= 0 i x
2
= 0
a
w
= a
β – kąt pochylenia linii zęba
1
2
17
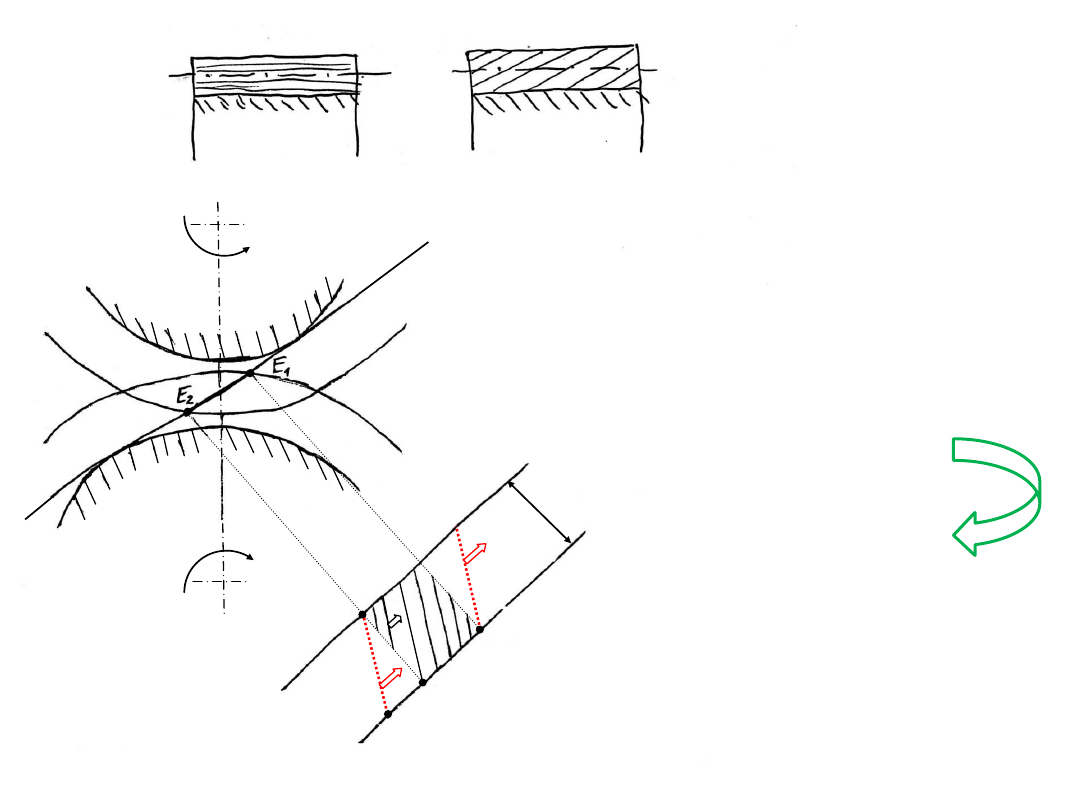
E
1
E
2
E
3
b
B
A
ω
2
ω
1
OZ1
OZ2
OW2
OW1
N
N
b – szerokość koła
E
3
– początek współpracy
E
1
- koniec współpracy
Współpraca kół
z zębami skośnymi
Dłuższy przypór
Większa liczba par
zębów w przyporze
zęby proste
zęby skośne
Linie styku zębów
18
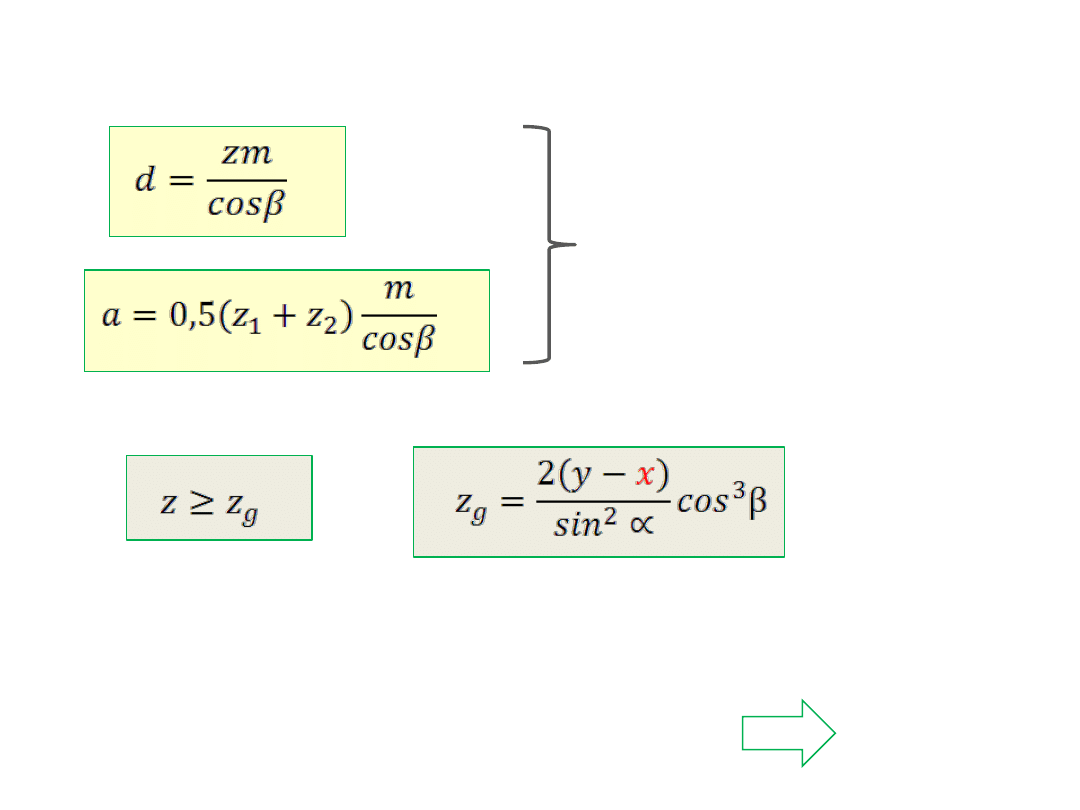
Opis matematyczny geometrii (koła walcowe, zęby skośne, x = 0)
Inne wielkości (
d
a
,d
f
,i,…) – jak
w kołach z zębami prostymi)
Np. dla β = 30º
z
g
≈ 11
• możliwość uniknięcia podcinania zębów
• dopasowywanie odległości osi do potrzeb
β
19
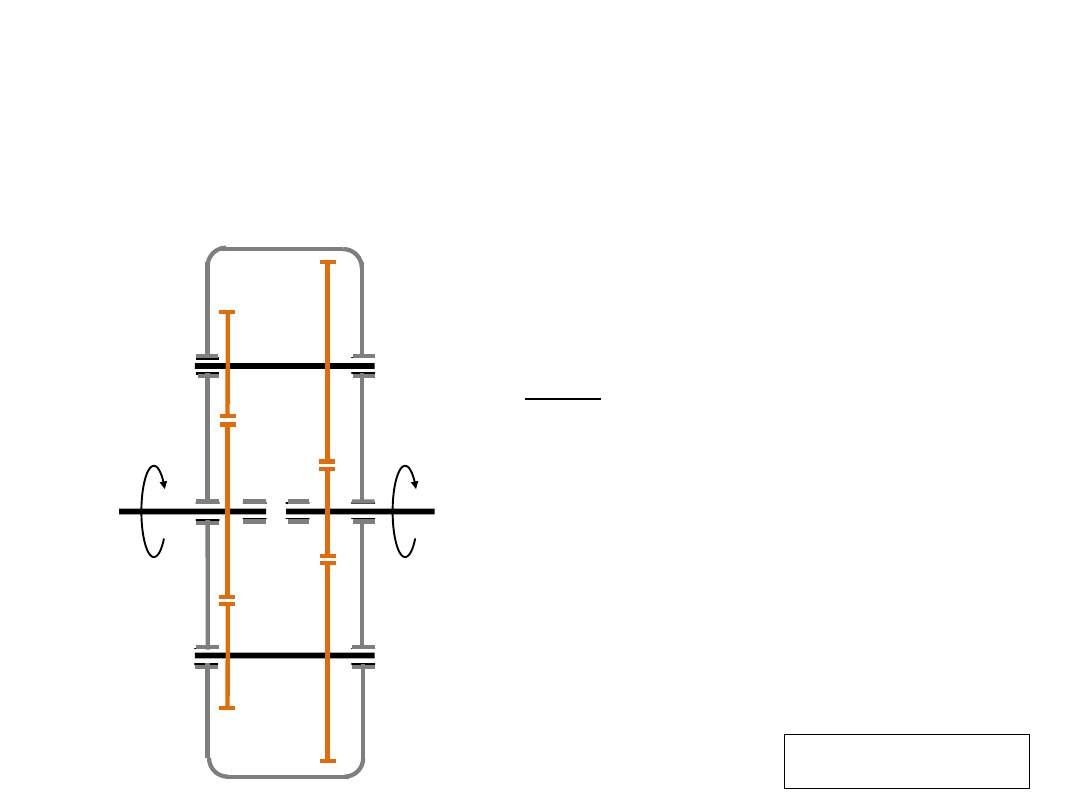
Zadanie
W dwustopniowej przekładni zębatej z kolami o zębach normalnych, wy-
konanymi bez przesunięcia zarysu : przełożenie i = 6,
Koło 2 jest osadzone na wspólnym wale z kołem 3, zazębionym z kołem
4. Koła 1 i 2 mają zęby skośne o module = 3,5 mm, a koła 3 i 4
mają zęby proste o module = 6 mm. Należy wyznaczyć:
z
1
= 20, z
2
=68.
z
1
z
2
z
3
z
4
ω
1
ω
4
m
12
m
34
a) najmniejsze liczby zębów kół 3 i 4,
zapewniające dokładną wartość
przełożenia oraz niepodcinanie bo-
ków zębów,
b) taki kąt pochylenia linii zębów kół
1 i 2, by odległości osi kół obydwu
stopni przekładni były jednakowe.
20
ω
1
ω
4
z
1
z
3
z
2
z
4
a
w
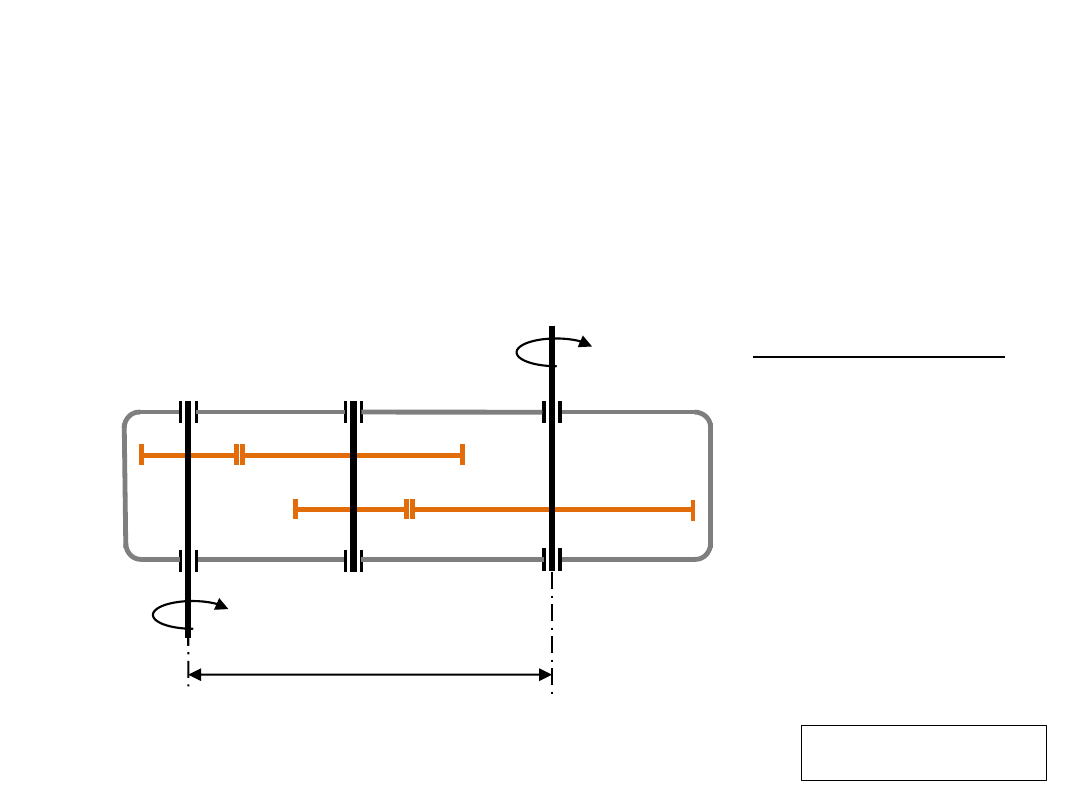
Zadanie
W dwustopniowym reduktorze są zastosowane koła walcowe wykonane
bez przesunięcia zarysu zębów. Koła 1 i 2 mają zęby skośne, a koła 3 i 4
-zęby proste. Odległość między osiami wałów - czynnego (wejścio-
wego) i biernego (wyjściowego) przekładni powinna wynosić 340 mm.
Należy wyznaczyć kąt β pochylenia zębów w kołach 1 i 2.
Dodatkowe dane :
z
1
=31, z
2
=96,
z
3
= 25, z
4
=44,
m
12
= 2,5 mm,
m
34
=5mm.
Odp.: 18,600 º
21
z
1
z
2
z
2
z
3
z
3
z
4
ω
1
ω
4
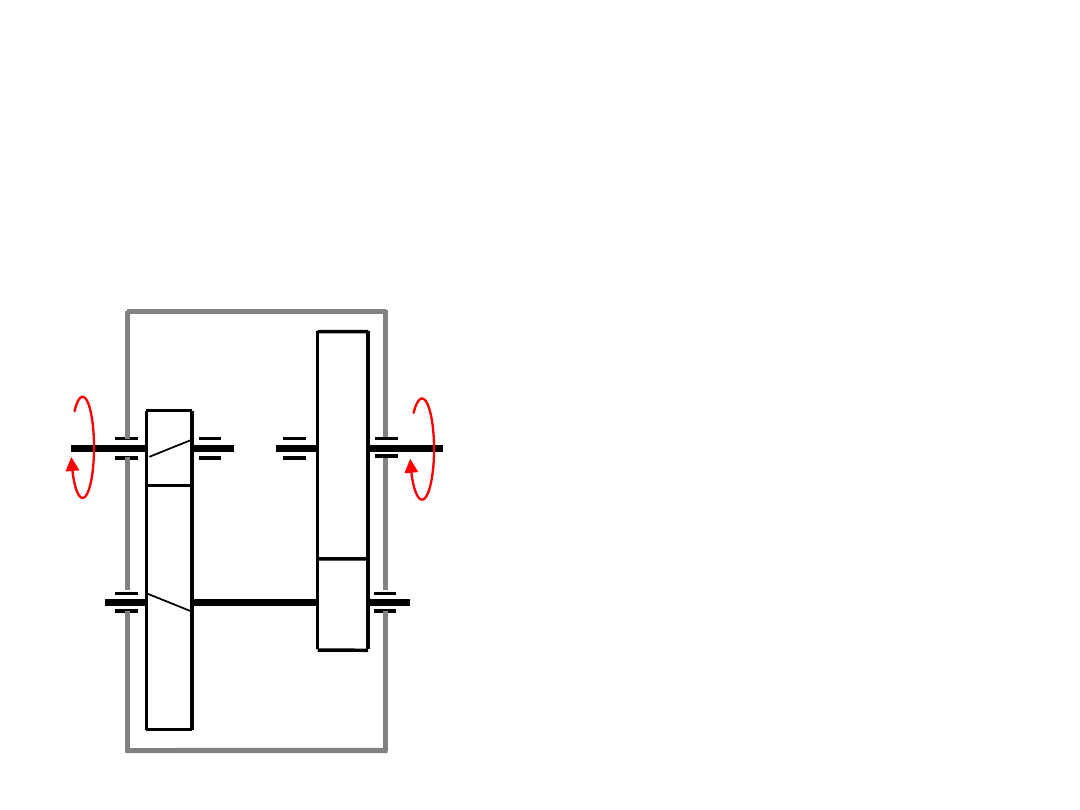
Zadanie
W dwustopniowej i dwudrożnej przekładni, pokazanej na rysunku, znane
są : liczby zębów poszczególnych kół, moduły w pierwszym
i w drugim stopniu przekładni oraz kąt β
12
pochylenia zębów kół 1 i 2.
Należy wyznaczyć kąt β
34
pochylenia zębów kół drugiego stopnia,
zapewniający prawidłową ich współ-
pracę.
m
12
i m
34
Dane :
z
1
= 18, z
2
= 61,
z
3
= 21, z
4
= 33,
m
12
= 3 mm, m
34
= 4 mm,
β
12
= 15º.
Odp.: 28,319º
22
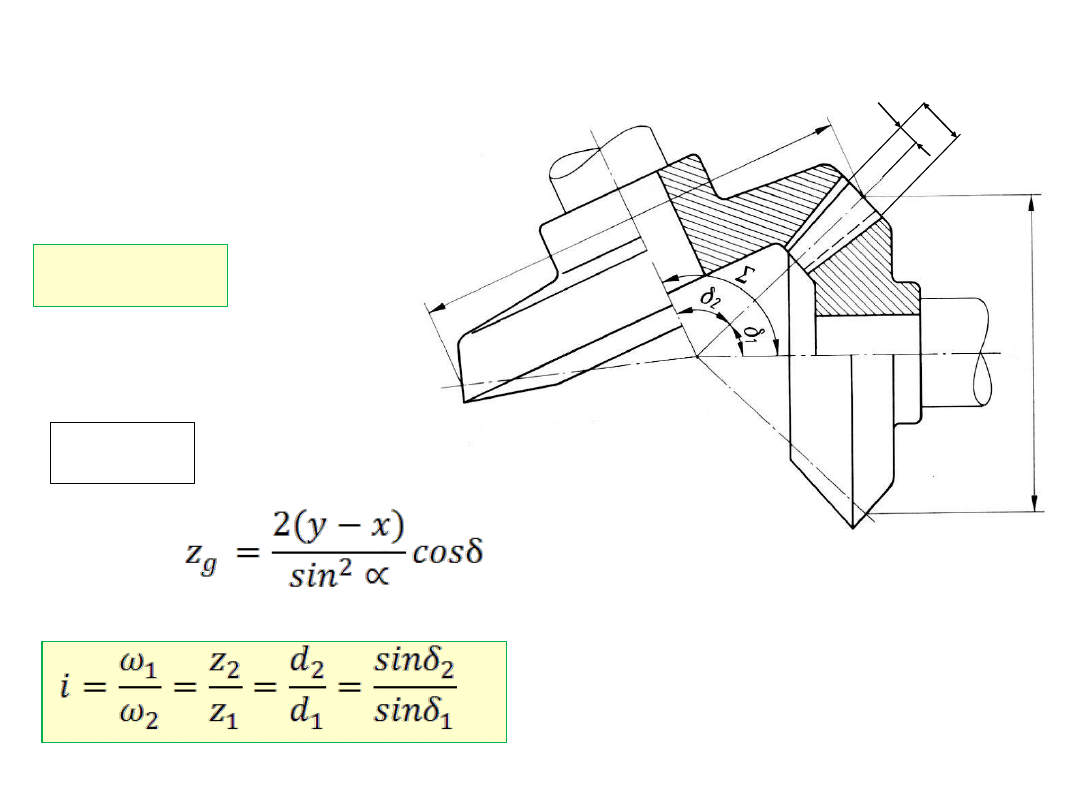
Opis geometrii zazębienia
i kół stożkowych
o zębach prostych
d
2
d
1
z
1
z
2
h
h
a
d = z∙m
h
a
= ym
z ≥ z
g
Zalety zębów skośnych
i zębów łukowych
23

24
Wyszukiwarka
Podobne podstrony:
PKM III 3b
PKM III 3c 2012
PKM III 3a
Konspekt PKM(2), SiMR, PKM III, Projekt 3, PKM 3 - WZORY, projekty, projekty - różne, Nowy folder, N
pkm obliczenia przekładni zębatej(1), SiMR, PKM III, Projekt 3, PKM 3 - WZORY
PKM III 3a 2012
Projekt - przek adnia pasow, PKM projekty, Projekty PKM III, Projekty
KKS III 3B
PKM@, SiMR, PKM III, Projekt 3, PKM 3 - WZORY, projekty, Pkm 3
PKM III 2 2012
PKM III 3d 2012
PKM III 3d 2012
Projekt napedu przenosnika, PKM projekty, Projekty PKM III
PKM poprawka, PKM projekty, Projekty PKM III
PKM III 3c 2012
PKM III 3a
PKM III 3c
~$PKM III 3c
więcej podobnych podstron