
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
1
BADANIE STEROWANIA PRZEMIESZCZENIEM NAP DU DC
1. Cel wiczenia
Celem wiczenia jest przeprowadzenie badania dokładno ci cyfrowego sterowania
przemieszczeniem liniowym nap du DC z przekładni limakow i efektorem
wskazuj cym.
2. Wprowadzenie teoretyczne
2.1. Zastosowanie serwomechanizmów do pozycjonowania elementów maszyn
i urz dze - ródła bł dów.
Wsz dzie tam, gdzie jest wymagane ustawienie lub przesuwanie liniowe i k towe
elementów urz dze z du dokładno ci zgodnie z sygnałem zadaj cym
najbardziej odpowiednie wydaje si by stosowanie serwomechanizmów. W
nowoczesnych serwomechanizmach cz
steruj ca jest realizowana cyfrowo.
Algorytm regulacji jest zaprogramowany w sterowniku cyfrowym, którym z reguły jest
mikrokomputer wbudowany w fabryczny sterownik silnika. Na dokładno całego
systemu składaj si poszczególne składowe dokładno ci kolejnych elementów
systemu wraz ze zjawiskami, jakie towarzysz przemieszczaniu si elementu
wykonawczego. W układach wysokiej precyzji wykorzystujemy pomiar
przemieszczenia z przetwornika wielko ci mechanicznej w elektryczn w p tli
sprz enia zwrotnego.
Niezale nie od rodzaju sterowanego procesu w ka dym układzie automatycznego
sterowania wyst puj /w układzie na badanym stanowisku/:
-obiekt sterowania /silnik DC z encoderem i limacznic /
-układ steruj cy /sterownik cyfrowy z układem PWM i stopniem wzmacniacza mocy/
-urz dzenia wej ciowe (sensory, wprowadzanie danych)
-urz dzenia wyj ciowe (urz dzenia wykonuj ce, rejestruj ce)
Struktura elektromechaniczna badanego układu regulacji wymaga
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
2
2.1.1. Ocena dokładno ci pozycjonowania serwomechanizmów
Dokładno systemu pozycjonowania mo na podzieli na dwie kategorie:
dokładno samej prowadnicy i dokładno pozycjonowania liniowego wzdłu
prowadnicy. Pierwsza opisuje stopie , w jakim prowadnica (kulka i wałek, ło ysko
powietrzne itd.) zapewniaj idealny ruch post powy wzdłu jednej osi, natomiast
druga dotyczy dokładno ci ruchu skokowego wzdłu osi (zazwyczaj odnosi si do
ruby poci gowej, enkodera liniowego lub innego urz dzenia ze sprz eniem
zwrotnym).
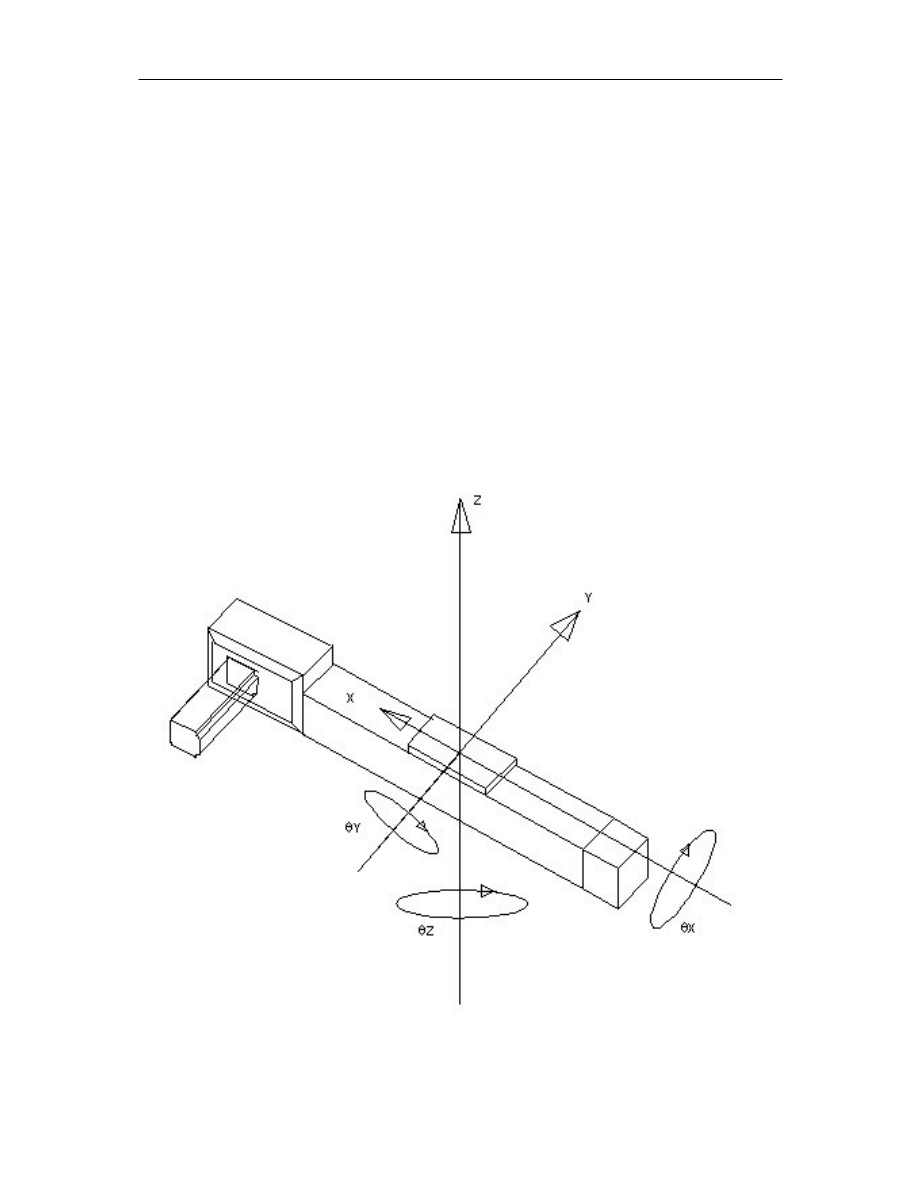
Ka dy poruszaj cy si przedmiot ma sze dost pnych stopni swobody. Składaj
si one z ruchu post powego, lub ruchu prostoliniowego, wzdłu której z trzech
prostopadłych osi (X, Y i Z), jak równie z ruchu obrotowego wokół której z tych osi
( x, y i z).
Rysunek 1) Sze stopni swobody przedmiotu poruszaj cego si wzdłu trzech osi

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
3
Funkcj prowadnicy pozycjonowania ruchu prostoliniowego jest dokładne
ograniczenie ruchu obiektu do jedynie pojedynczej osi ruchu post powego osi X.
Jakiekolwiek odchylenia od idealnego ruchu prostoliniowego wzdłu osi X s
wynikiem niedokładno ci w monta u prowadnicy.
Jest pi mo liwych typów niedokładno ci prowadnicy, odpowiadaj cych pi ciu
pozostałym stopniom swobody: ruch post powy wzdłu osi Y, ruch post powy
wzdłu osi Z; ruch obrotowy wokół osi X (o wzdłu na); ruch obrotowy wokół osi Y
(o poprzeczna); i ruch obrotowy wokół osi Z (o odchylania). Poniewa wyst puj
współzale no ci pomi dzy tymi bł dami (ruch k towy np. powoduje bł d ruchu
post powego w dowolnym punkcie innym ni rodek ruchu obrotowego), warto
uwa nie zbada skutki ka dego typu bł du i metod ich pomiaru.
2.1.2. Bł dy ruchu post powego prowadnicy
Poniewa wszystkie u yteczne metody wytworzenia ruchu prostoliniowego
dotycz przeci tnie wielu punktów (z powodu wielu kulek lub wałeczków albo
powierzchni ło yska powietrznego), "czyste" bł dy ruchu post powego z ruchu
prostoliniowego (tzn. bez adnego ukrytego bł du k towego) s zazwyczaj
drugorz dne. Zbytni bł d fali sinusoidalnej w prowadnicach elementów obracaj cych
si mo e doprowadzi do czystego bł du ruchu post powego bez ruchu
obrotowego, jak w przypadku ka dego wałeczka poruszaj cego si po cz steczce
zanieczyszczenia jednocze nie; oba te przypadki nie s nigdy spotykane w praktyce.
Je eli platforma elementu obracaj cego si zostanie nara ona na du e uderzenie, w
prowadnicy mog powsta odci ni cia (wgniecenia) w miejscu ka dej kulki lub
wałeczka; mo e to doprowadzi do czystego bł du ruchu post powego, który
wyst puje okresowo wzdłu przesuwu.

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
4
2.1.3. Dokładno pozycjonowania liniowego
Wiele technik jest dost pnych, aby wzrastaj co okre li poło enie ładunku
u ytecznego u ytkownika wzdłu osi liniowej. ruby poci gowe i ruby z nakr tk
kulkow s najbardziej powszechne, chocia silniki liniowe, prowadnice
piezoelektryczne i nap dy pasowe s tak e stosowane. Dokładno pozycjonowania
liniowego jest po prostu stopniem, do jakiego sterowane ruchy zgadzaj si z
mi dzynarodowymi jednostkami długo ci. Ostatecznie, wszystkie pomiary długo ci
s zwi zane z metrem, według definicji metra zatwierdzonej przez Generaln
Konferencj Miar i Wag, jego bie ca warto stanowi drog , jak wiatło przebywa
w pró ni w ci gu 1/299.792.458 sekundy.
2.1.4. Systemy oparte o rub poci gow
Systemy o niskiej do umiarkowanej dokładno ci zazwyczaj opieraj si na
rubie poci gowej lub rubie z nakr tk kulkow , aby zapewni dokładny ruch
wzrastaj cy. Takie systemy s cz sto sterowane w układzie otwartym poprzez silniki
krokowe; je eli stosowane jest sterowanie w układzie zamkni tym jest ono cz sto z
enkoderem obrotowym. W obu przypadkach, ruba poci gowa jest zasadniczym
elementem okre laj cym dokładno . ruby poci gowe wykazuj narastaj cy bł d
skoku, który ma zazwyczaj monotoniczny charakter, razem ze składnikiem
okresowym, który jest cykliczny i ró ni si w czasie obrotu ruby. Ponadto, mo e by
luz w nakr tce, który ujawni si po zmianie kierunku. Platformy precyzyjnego
pozycjonowania wykorzystuj albo wst pnie obci on rub z nakr tk kulkow
albo rub poci gow z nakr tk ciern kompensacji luzu. ruby z nakr tk kulkow
s preferowane do szybkobie nych zastosowa i oferuj wysok naturaln
cz stotliwo ze wzgl du na ich wewn trzn sztywno . ruby poci gowe z
nakr tkami kompensacji luzu zapewniaj bardzo wysok powtarzalno po
umiarkowanym koszcie i nadaj si do wi kszo ci zastosowa . W ród czynników,
które ł cz si z obni eniem całkowitej wydajno ci s rozszerzalno cieplna, z
powodu zarówno zmian temperatury otoczenia, nagrzewania wywołanego tarciem
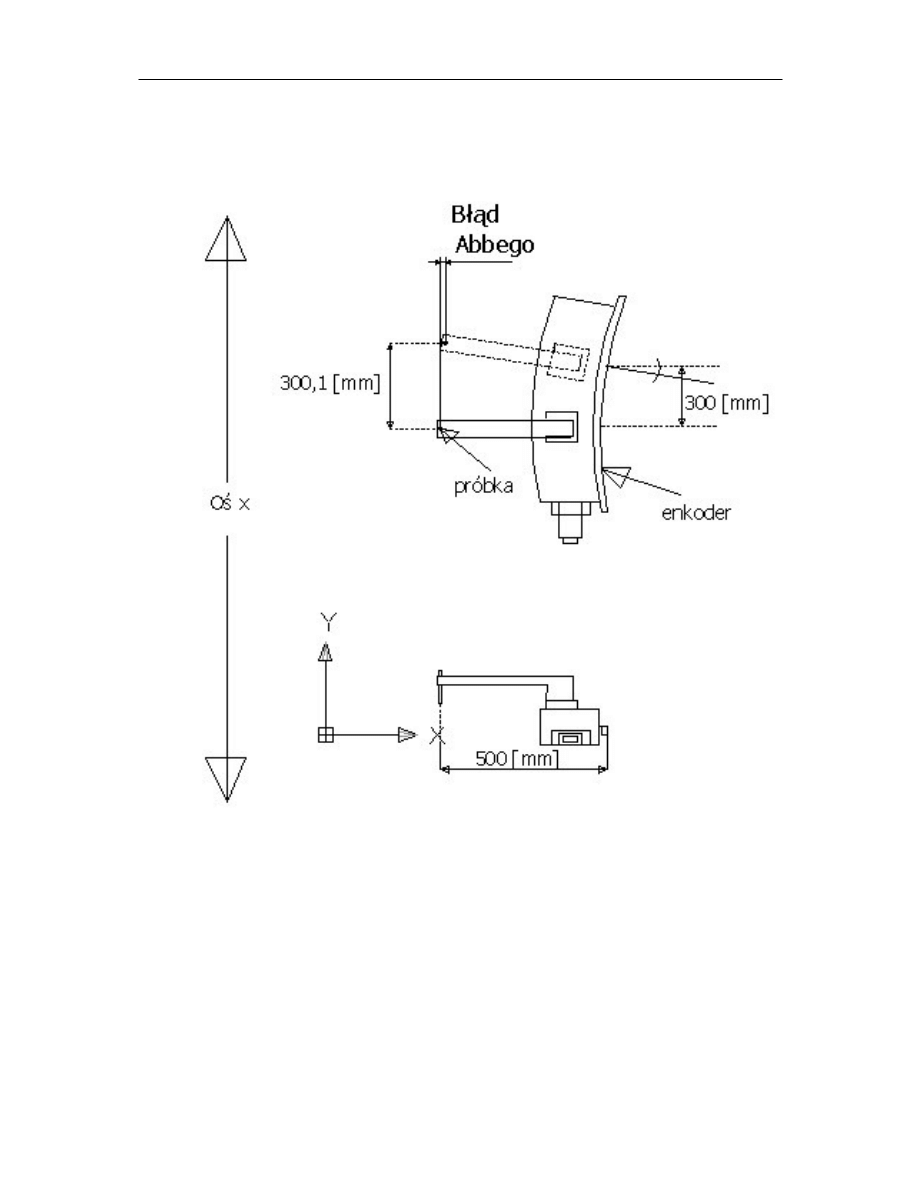
nakr tki i bł du Abbego (Rysunek 2). Oba z ostatnich zjawisk wywołuj ró ne
warto ci bł dów w zale no ci od miejsca na ładunku u ytecznym u ytkownika. W
przypadku rozszerzalno ci cieplnej ruby poci gowej, poło enie nakr tki w stosunku
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
5
do podwójnego ło yska jest wa ne, natomiast w przypadku bł du Abbego jest to
odległo od linii rodkowej ruby poci gowej do ładunku u ytecznego.
Rysunek 2) Interpretacja graficzna bł du Abbego

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
6
2.1.5. Systemy oparte o enkoder liniowy
Zastosowanie enkodera liniowego eliminuje trosk o ł czny i okresowy bł d ruby
poci gowej, jak równie rozszerzenie cieplne wywołane tarciem. W wielu systemach,
mo na si pozby ruby poci gowej i zast pi bezkontaktowym silnikiem liniowym.
Przy dokładno ci wła ciwej na poziomie 5 mikronów na metr, platformy szyfrowane
liniowo oferuj znaczny wzrost dokładno ci w stosunku do systemów opartych o
rub poci gow , jak równie du o wi ksz rozdzielczo (zazwyczaj 0,1 do 1
mikrona). Jednak e, liczba ródeł bł dów pozostaje i s one cz sto pomijane przy
okre laniu enkodera. Pojedynczy najwi kszy bł d jest cz sto bł dem Abbego, który
mo e łatwo pogorszy dokładno o dziesi tki mikronów. Przy współczynniku
rozszerzenia cieplnego wynosz cym ~10 ppm/ºC, temperatura otoczenia enkoderów
liniowych musi by uwa nie kontrolowana, aby wykorzysta ich potencjaln
dokładno . Zmiana temperatury otoczenia o 1ºC powoduje bł d 10 mikronów na
metr, dwa razy tyle co dokładno wła ciwa (5 mikronów/m) enkodera. Enkodery
stykowe s wygodne, ale zjawisko nadmiernego wzrostu sygnałów głowicy odczytu
mo e wynosi około pół mikrona, i wi cej. Enkodery bezstykowe eliminuj zjawisko
nadmiernego wzrostu sygnałów głowicy odczytu, ale mog mie wi ksze wymagania
odno nie ustawienia w linii podczas monta u. Sama rozdzielczo enkodera okre la
ródło bł du; enkoder o rozdzielczo ci 1 mikrona poruszaj cy si od zera do +5
mikronów mo e wy wietli +2 mikrony, gdy głowica odczytu jest w rzeczywisto ci na
+2,7 mikronach, powoduj c bł d 0,7 mikrona w najgorszym przypadku. Zwi kszenie
rozdzielczo ci poni ej 2-5 mikronów wymaga na ogół elektronicznej interpolacji,
która mo e si tak e przyczyni do bł dów ni szego poziomu. Enkodery liniowe nie
s równie w stanie korygowa bł dów prostopadło ci, które mog wynosi od 1 do
20 mikronów, tak samo w zale no ci od konstrukcji platformy, precyzji i przesuwu.
Prawidłowo okre lone enkodery liniowe mog znacznie poprawi dokładno
systemu, szczególnie, je eli stosowane jest odwzorowanie, ale ich ograniczenia s
cz sto pomniejszane. W ostatnich latach, pojawiło si wiele konstrukcji enkoderów,
które wykorzystuj rozpraszanie lub dyfrakcj , aby okre li poło enie. Pierwsze
wykorzystuj stalow ta m jako powierzchni odniesienia, daj c w rezultacie
bardzo wygodny enkoder bezstykowy o rozdzielczo ci do 0,1 mikrona. Wyst puj
bł dy liniowo ci (pochylenia) rz du 20 mikronów/metr, ale mo na je skompensowa
za pomoc dwupunktowej korekcji bł du pochylenia. Enkodery wykorzystuj ce

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
7
dyfrakcj umo liwiaj zastosowanie bardzo dokładnej podziałki dyfrakcyjnej i
zapewniaj rozdzielczo na poziomie 10 nanometrów. Pomimo tych wła ciwo ci,
podlegaj one ródłom bł dów opisanym powy ej.
2.1.6. Rozdzielczo
Rozdzielczo jest okre lana jako najmniejszy przyrost pozycji, jaki mo e by
wybrany w systemie sterowania ruchem. Mechaniczne podzespoły pozycjonowania,
silnik, urz dzenie ze sprz eniem zwrotnym i sterownik elektroniczny odgrywaj
swoj rol w okre leniu całkowitej rozdzielczo ci systemu.
W systemach z silnikami krokowymi, rozdzielczo jest ustawiana przez skok
ruby poci gowej, k t skoku silnika i elektronik nap du. Dla danej podziałki, dwie
rozdzielczo ci pełnokrokowe mo na osi gn przez zastosowanie albo silnika
krokowego o skoku 1,8 stopnia lub 0,9 stopnia, (które dostarczaj odpowiednio 200 i
400 pełnych kroków/obrót). T rozdzielczo pełnokrokow mo na dalej zwi kszy
przez mikrostopniowanie. Kluczowym pytaniem jakie nale y zada w okre leniu
wymaganej rozdzielczo ci systemu jest: "Jakie s minimalne skokowe ruchy, które
nale y wykona w danym zastosowaniu?” Rozdzielczo jest łatwo nadmiernie
okre lana lub mieszana z dokładno ci i/lub powtarzalno ci . Ogólnie, wła ciwe jest
okre lenie rozdzielczo ci, która jest około pi razy mniejsza od bł du pozycji, który
jest wymagany w danym zastosowaniu.
Rozdzielczo układów regulowanych z serwomotorami, które wykorzystuj
enkodery obrotowe stanowi funkcj podziałki ruby poci gowej i rozdzielczo ci
enkodera. Enkodery obrotowe charakteryzuj si ilo ci linii na obrót.
Rozdzielczo układów regulowanych z serwomotorami wykorzystuj cymi
enkodery liniowe lub interferometry laserowe jest niezale na od podziałki ruby i jest
dokładnie funkcj urz dzenia pozycjonuj cego ze sprz eniem zwrotnym. W
niektórych przypadkach, ruba poci gowa jest zast powana silnikiem liniowym, który
wymaga stosowania enkodera liniowego. Standardowe enkodery liniowe DPS
zapewniaj rozdzielczo na poziomie 5, 2, 1, 0,5, 0,25 lub 0,1 mikrona z elektronik
do interpolacji wbudowan w głowic odczytu enkodera. Poniewa poszukuje si
coraz lepszych rozdzielczo ci, pojawia si wa ne rozró nienie pomi dzy
najmniejszym skokiem, jaki mo e by nakazany, a najmniejszym skokiem, jaki
mo na osi gn . Na przykład, nap dzanie ruby poci gowej 0,5 mm za pomoc

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
8
mikrosilnika o 50.000 krokach na obrót lub zakodowanego serwomotoru o 50.000
licze /obrót dostarcza nominaln rozdzielczo rz du 25 nanometrów. Jednak e,
tarcie wyst puj ce w silniku, nakr tce i prowadnicach (szczególnie tych typu
obiegowego) czyni ruchy dwukierunkowe takiej wielko ci niemo liwymi. U yteczne
rozdzielczo ci poni ej poziomu 100 nanometrów wymagaj minimalizacji tarcia
mechanicznego. Inn trudno ci dotycz c bardzo du ych rozdzielczo ci jest
wynikaj ce ograniczenie pr dko ci maksymalnej, poniewa zespoły elektronicznych
obwodów licz cych nakładaj ograniczenie na ilo licze na sekund jakie mog
by przetworzone.
3. Obliczenie modelu obiektu regulacji
Model matematyczny i numeryczny obiektu sterowania oraz metodyka jego bada
metod symulacji w programie Matlab s znane studentom w ramach prowadzonych
wykładów i wicze z przedmiotu
„Sterowanie w systemach mechatronicznych”.
4. Opis stanowiska laboratoryjnego
Stanowisko umo liwia badanie podstawowych parametrów sterowania
układem przesuni cia liniowego a mianowicie dokładno ci i powtarzalno ci. W skład
stanowiska badawczego wchodz : komputer PC ze rodowiskiem programistycznym
procesora ATMega16 oraz moduł sterownika z serwomechanizmem w konfiguracji:
•
mikroprocesor /Mp/ ATMega16,
•
układ sterownika mocy dla nap du serwo Allegro A3952SB „FULL-BRIDGE
PWM MOTOR DRIVER”,
•
nap d serwo Micro Mo Electronics 1331 E 024 S 123,
•
limacznica,
•
enkoder,
•
narz dzie suwmiarka do r cznego pomiaru przesuni cia dla weryfikacji.
W Mp został umieszczony program, który odpowiednio steruje prac silnika oraz
przetwarza sygnały pobierane z zewn trz.
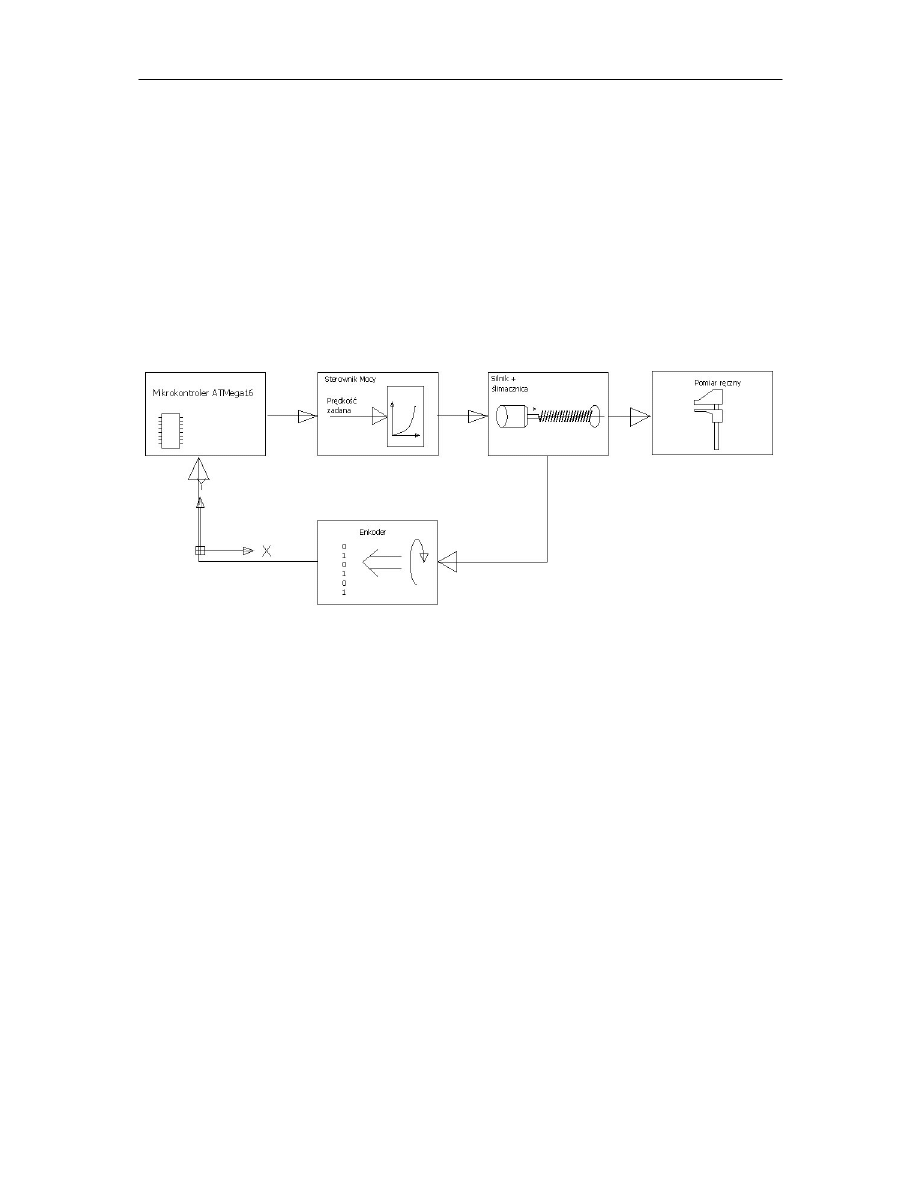
Rysunek 3) przedstawia schemat blokowy układu badania przemieszczenia w
warunkach laboratoryjnych.
Zadaniem Mikroprocesora (Mp) jest kalibracja układu, sterowanie pr dko ci oraz
obróbka sygnału poło enia z enkodera na podstawie, którego Mp kontroluje pozycj
wska nika na limacznicy (przemieszczenie). Zadana programowo pr dko jest
zamieniana w Mp na odpowiadaj ce sygnały PWM. W ten sposób wygenerowany
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
9
sygnał PWM steruje prac mostka mocy. Zadaniem ko cówki mocy jest zasilanie
(kluczowanie) silnika zgodnie z PWM do napi cia odniesienia. Pod wpływem
zasilania nap d obraca limacznic , co w efekcie daje nam przesuni cie liniowe
wska nika poło enia (efektora). Zintegrowany enkoder z serwonap dem generuje
impulsy zgodnie z wielko ci obrotu wirnika, które s przesyłane bezpo rednio do
Mp. Po osi gni ciu wymaganej pozycji układ zostaje zatrzymany. Nast pnie
dokonujemy odczytu pozycji efektora z monitora i porównujemy z wynikiem metody
pomiaru r cznego.
Rysunek nr 3.
Wykonanie kilku cykli o tej samej warto ci zadanej pozwala nam na zbadanie
powtarzalno ci serwomechanizmu. Przy zadanej wielko ci przesuni cia badamy
dokładno przesuni cia, układ ten pozwala na badanie powy szych parametrów i
obserwacj ich dla ró nych pr dko ci.
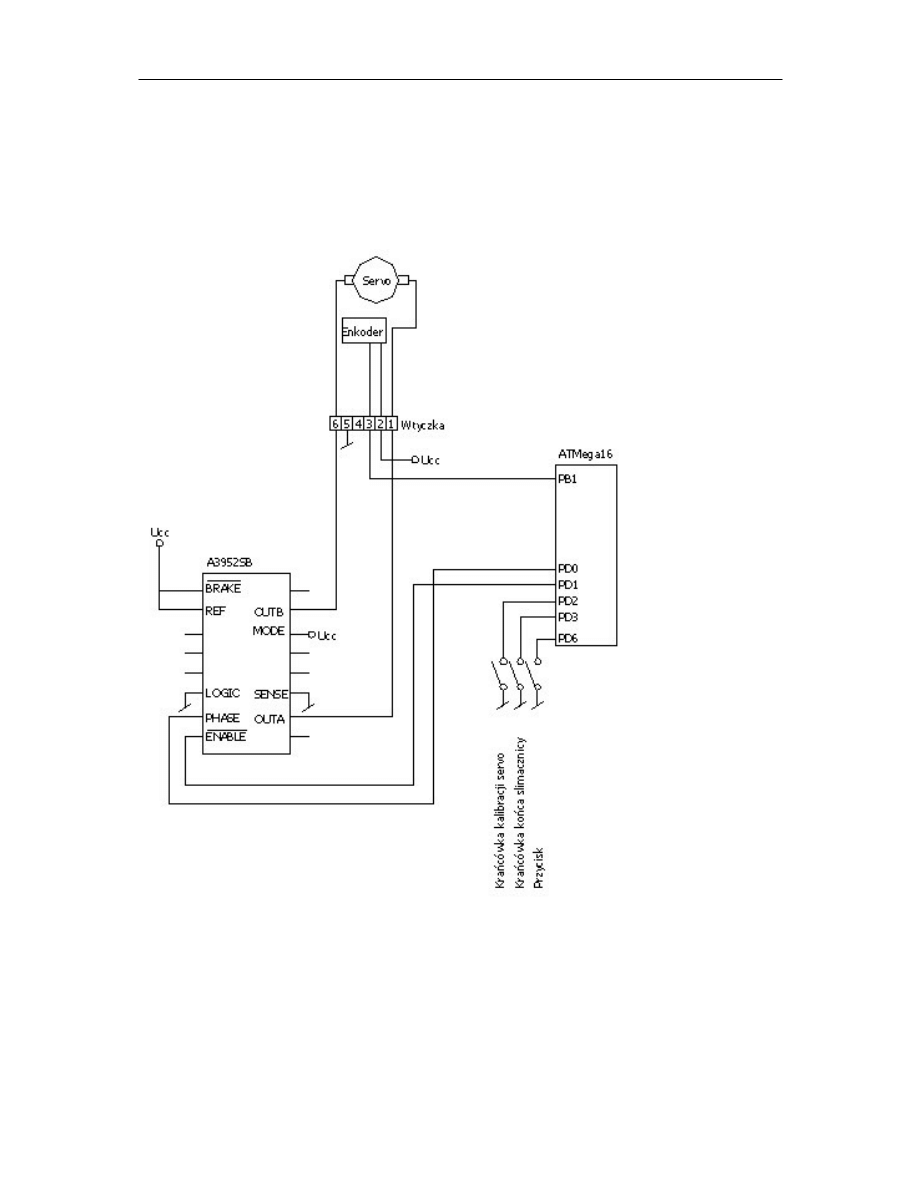
Rysunek 4) przedstawia schemat elektryczny poł cze układu.
Do portu PD mikrokontrolera /Rysunek 5/ s podpi te odpowiednio w funkcji wyj cia:
-PD0 sygnał Enable ko cówki mocy
-PD1 sygnał PHASE ko cówki mocy.
Do PD w funkcji wej cia s podpi te:
-PD2 kra cówka kalibracji pracy Serwo (wył cznik kra cowy)
-PD3 kra cówka ko ca limacznicy (wył cznik kra cowy)
-PD6 przycisk przej cia do kolejnego zadania
Do portu PB1 w funkcji wej cia jest podpi ty sygnał z enkodera
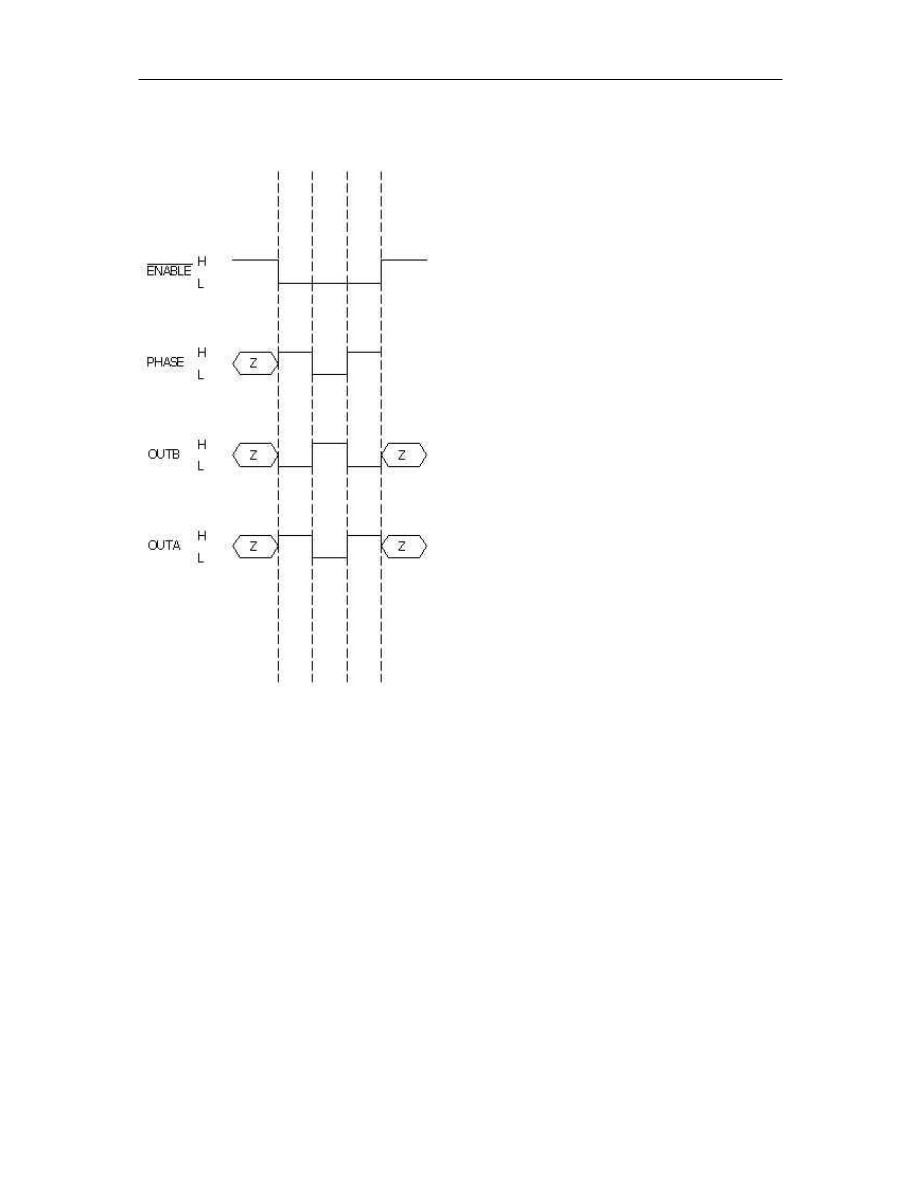
Generowane sygnały PWM s wysyłane na wej cie PHASE układu Allegro. W
układzie tym nast puje funkcja transferu napi cia zasilania zgodnie z PWM na
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
10
wyj cia OUTA i OUTB. Zgodnie z sygnałem PWM na wyj ciach OUTA i OUTB
pojawia si wypadkowe nai cie zasilania nap du serwo. Kierunek pracy zale y od
stanu na wej ciu PHASE .
Rysunek nr 4.
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
11
Rysunek nr 5.
4.1. Charakterystyka zespołów stanowiska laboratoryjnego
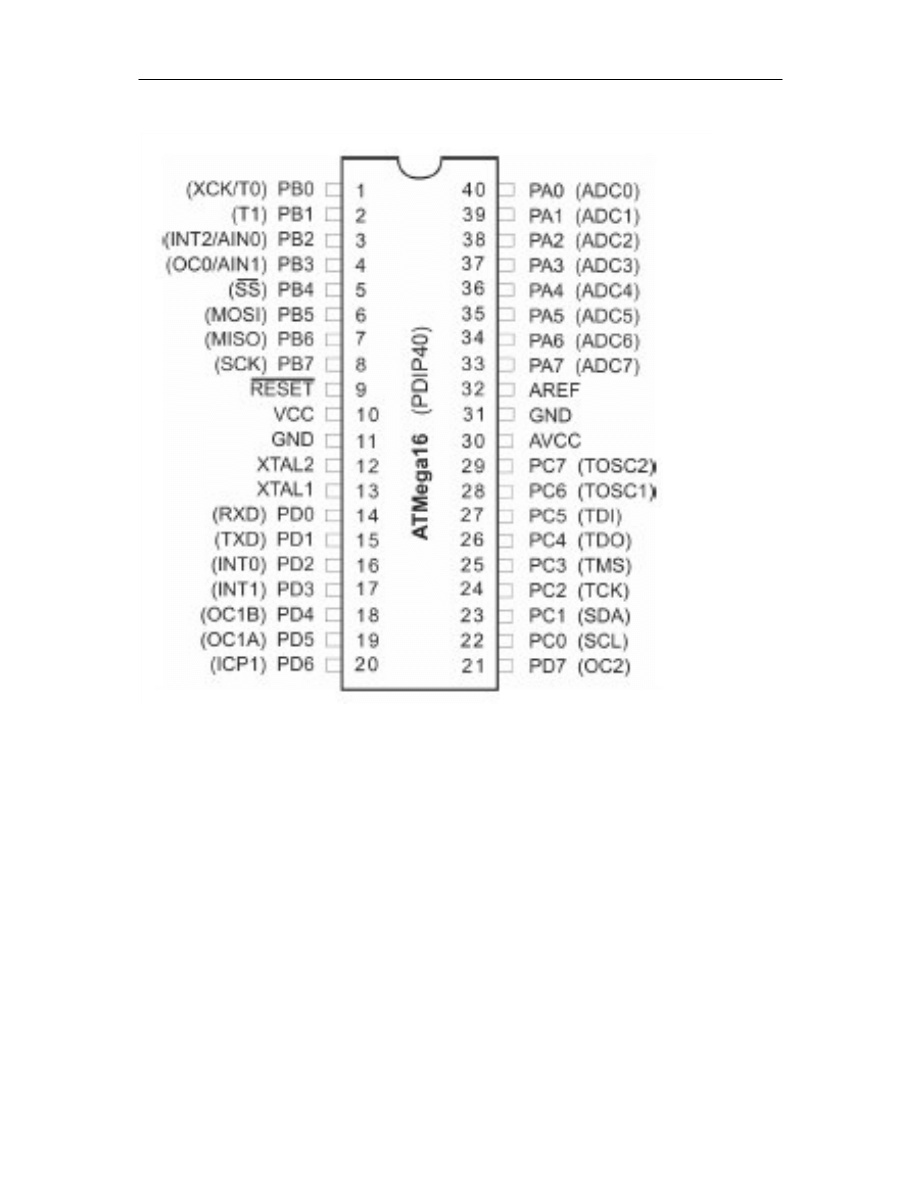
4.1.1. Mikrokontroler ATmega16 AVR
Mikrokontroler ATmega16 to procesor z, architektur RISC, wykonuj ce wszystkie
instrukcje w jednym cyklu zegara. Wbudowane funkcje, wewn trzne zegar, timery,
UART, SPI, rezystory pull-up, PWM, przetworniki A/D, komparatory, watch dog i
wiele innych. Zestaw instrukcji steruj cych MP został zaprojektowany z my l o
redukcji wielko ci programu pozwalaj c na efektywne programowanie w C i
asemblerze. Procesor ten ma wbudowan pami Flash i EEPROM. Schemat
wyprowadze mikrokontrolera przedstawia rysunek 6.
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
12
Rysunek 6.
Podstawowe parametry kontrolera s nast puj ce:
-RISC, 131 instrukcji (wi kszo 1 cyklowe), nastawione na j zyk C, mno enie 3
cyklowe,
-16kB pami ci flash programowanej w systemie (ISP) z funkcj Read-While-Write,
trwało do 10k cykli kasuj/zapisz,
-32 x8 rejestry robocze,
-1kB pami ci SRAM,
-512 pami ci EEPROM (100k cykli),
-Programowalne blokady bezpiecze stwa pami ci programu i eeprom,
-do 32 konfigurowalnych linii I/O,
-Interfejs JTAG (IEEE 1149.1): testowanie, debudowanie w układzie, programowanie
pami ci w systemie,

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
13
-Trzy elastyczne timery/liczniki z trybami porównania (Input/Output Compare),
-Wewn trzne i zewn trzne programowalne przerwania,
-Szeregowy interfejs USART (praca synchroniczna i asynchroniczna),
-Interfejsy szeregowe TWI (kompatybilny z I2C) oraz SPI,
-8kanałowy 10 bitowy przetwornik ADC, z opcjonalnym trybem wej cia ró nicowego
wraz z programowalnym wzmocnieniem (tylko w wersji TQFP),
-Analogowy komparator w układzie,
-Programowalny Watchdog z własnym oddzielnym oscylatorem,
-Układ Power-On Reset (zapewnienie prawidłowego resetu po wł czeniu zasilania),
-Wewn trzny programowany generator RC (1, 2, 4 lub 8MHz), który pozwala w wielu
przypadkach zrezygnowa z podł czania zewn trznego kwarcu,
-Programowalny próg spadku napi cia zasilania (Brown-out detection),
-6 trybów oszcz dzania energii,
-Zakresy napi zasilania 4,5 - 5,5 V
-Dopuszczalna szybko pracy 0-16 MHz
-Pobór mocy dla 3V przy 1MHz:
-W stanie aktywnej pracy: 1,1 mA,
-Tryb Idle: 0,35mA,
-Tryb Power-down: poni ej luA.
Technologia Flash ISP pozwala na przeprogramowywanie pami ci „w systemie"
poprzez szeregowy interfejs ISP, z wykorzystaniem konwencjonalnych
programatorów, magistral JTAG, a tak e przez program botuj cy pracuj cy w
samym układzie. Program botuj cy mo e wykorzystywa dowolny rodzaj interfejsu,
aby załadowa wła ciwy program do pami ci aplikacji. Program z sekcji botuj cej
kontynuuje swoj prac podczas programowania cz ci aplikacyjnej, na co pozwala
technika rzeczywistego Write-While-Read.
Poł czone mo liwo ci 8-bitowej jednostki obliczeniowej RISC, programowania w
systemie oraz samoreprogramowaniem pami ci flash w jednym układzie, pozwala
na zastosowanie tego mikrokontrolera w elastycznych funkcjonalnie i oszcz dnych
cenowo rozwi zaniach, w wymagaj cych kontroli działania aplikacjach
wbudowanych.

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
14
4.1.2. 8 bitowy licznik 0 z PWM
Główne wła ciwo ci oraz mo liwo ci zastosowa licznika:
- Licznik jednokanałowy
- Automatyczne kasowanie i restart timera w trybie porównania
- Generator cz stotliwo ci
- Generator przebiegu PWM
- Licznik zdarze zewn trznych
- 10-bitowy programowalny preskaler
- ródło przerwa (przepełnienie, zrównanie).
4.1.3. 16 bitowy licznik 1
- Prawdziwa 16-bitowa konstrukcja (mo liwy np. 16-bitowy PWM)
-
Niezale ne dwie jednostki Output Compare
-
Jednostka Input Capture z układem redukcji szumów
-
Automatyczne kasowanie i restart timera w trybie porównywania
-
Generator cz stotliwo ci
-
Generator przebiegu PWM
-
Licznik zdarze zewn trznych
-
10-bitowy programowalny preskaler
-
4 niezale ne ródła przerwa .
Licznik mo e by taktowany wewn trznie poprzez układ preskalera lub przez
zewn trzne ródło podł czone na pinie T1. Blok logiczny wyboru zegara, kontroluje
wybór tego ródła oraz rodzaj zbocza, które b dzie licznik inkrementowa lub
dekrementowa .
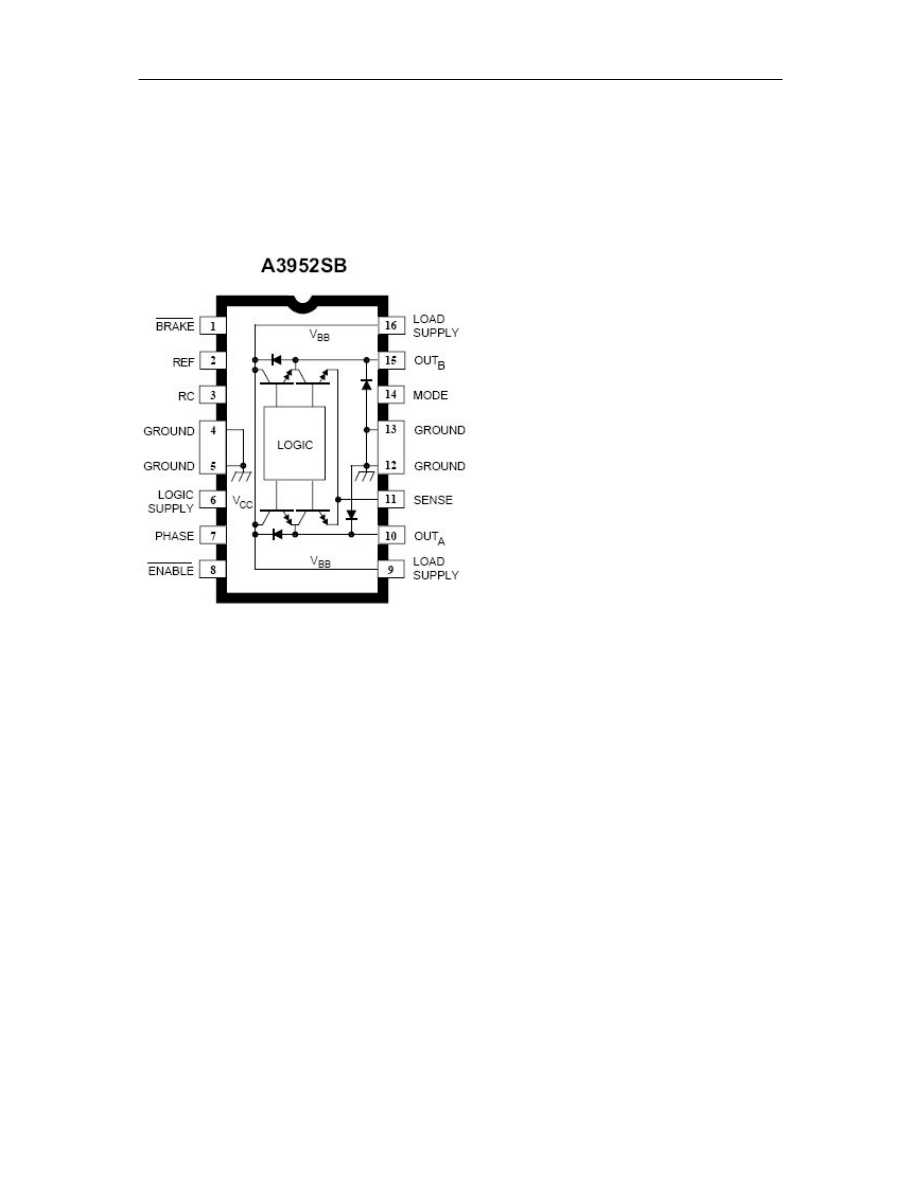
4.1.4. Blok sterownika mocy
Zadaniem tego bloku (Allegro A3952) jest wygenerowanie takiego sygnału o
okre lonej mocy dla silnika, aby pr dko obrotowa odpowiadała pr dko ci zadanej.
Pr dko nap du jest kontrolowana przez modulacje szeroko ci impulsu (PWM)
podawan na wej cie „PHASE”. Sygnał „PHASE” jest transferowany na wyj cie
układu w postaci odpowiadaj cemu mu napi cia. W zale no ci od wypełnienia na
wyj ciu uzyskujemy od 0 do 50V.
Pulse-width modulation (PWM) (modulacja szeroko ci impulsu) to metoda regulacji
sygnału pr dowego lub napi ciowego, polegaj ca na zmianie szeroko ci impulsu,
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
15
u ywana we wzmacniaczach, zasilaczach impulsowych oraz układach steruj cych
prac silników pr du stałego. Zastosowanie tej metody zmniejsza znacznie straty
mocy w układzie regulacyjnym oraz gwarantuje du dokładno sterowania
urz dzeniem.
Schemat wyprowadze układu Allegro A3952 przedstawia rysunek 7.
Rysunek 7.
4.1.5. Silnik z enkoderem
Zastosowany w układzie silnik DC to serwonap d Micro Mo Electronics 1331 E 024
S 123, którego podstawowe parametry s nast puj ce:
-Zasilanie 24 [V]
-Moc wyj ciowa 2,66 [Wat]
-Maksymalny pr d wirnika 0,19 [A]
-Maksymalny moment obrotowy 3,2 [mNm]
-Pobór pr du dla 10400 [rpm/nominalna] bez obci enia 5,5 [mA]
-Maksymalna sprawno 80%
-Stała obrotów przypadaj ca na 1[V], 439 [rpm] – w nominalnym zakresie pracy,
-Stała mechaniczna 7 [ms]
-Stała Elektromotoryczna E dla zmiany kierunku 2,28 [Mv/rpm]
-Bezwładno wirnika 0,63 [gcm
2
]
-Maksymalna temperatura wirnika 125°C (dla temp. Otoczenia 25°C)
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
16
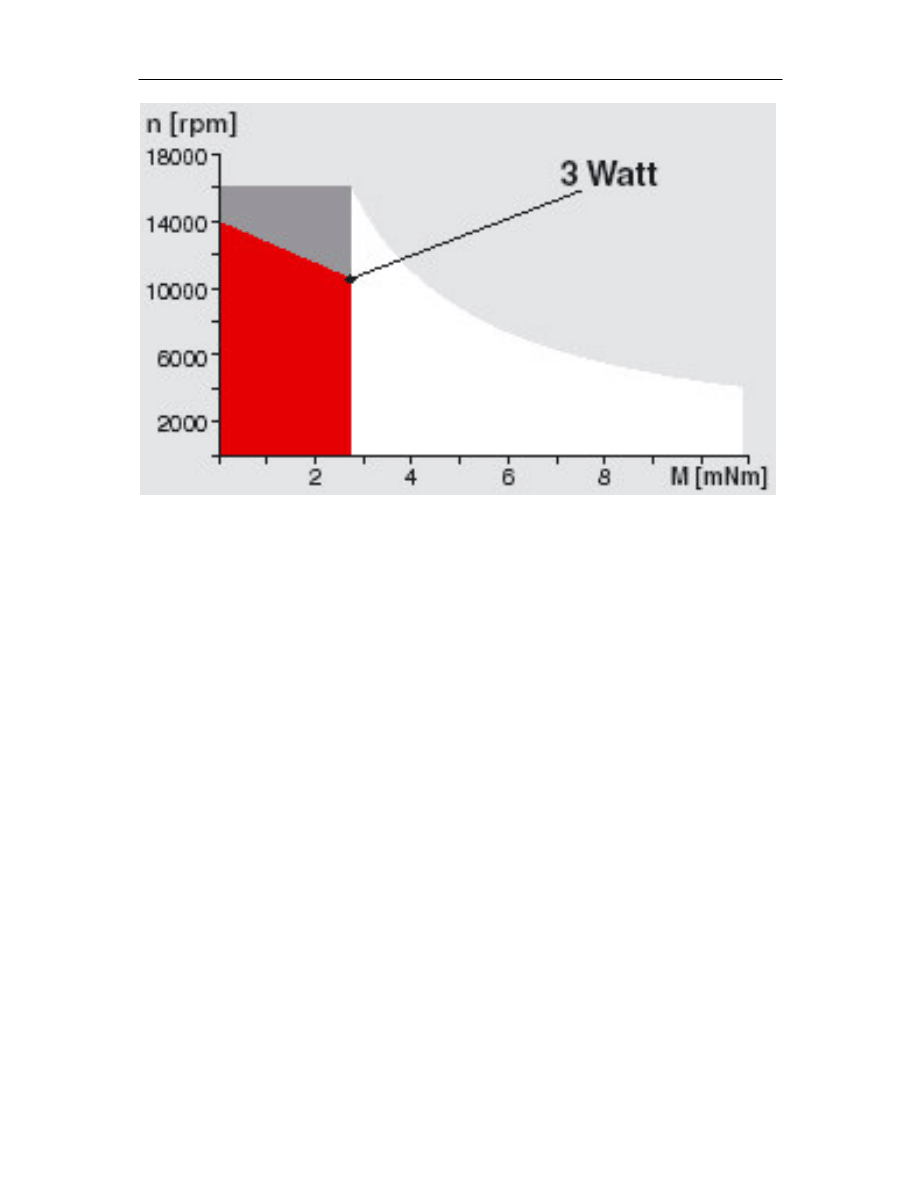
Rysunek 8.
Rysunek 8) pokazuje obszary pracy silnika. Obszar czerwony jest typowym
obszarem pracy dla silnika a jego osi gi s najefektywniejsze. Obszar biały jest
dozwolony tylko dla krótkotrwałych operacji, istnieje du e prawdopodobie stwo
przeci enia silnika. Praca w obszarze szarym (wysokie obroty) oznacza znaczny
spadek dynamiki, oraz wysok temperatur nap du, przy dłu szej pracy istnieje
niebezpiecze stwo przekroczenia maksymalnej temperatury wirnika.
Zastosowany zintegrowany enkoder Micro Mo Electronics HES119 o rozdzielczo ci
16 impulsów na obrót. Maksymalny czas narastania zbocza to 5[µs], maksymalna
cz stotliwo generowania impulsów 7,2 kHz
Silnik jest wyposa ony w zintegrowany reduktor
11,8:1
co daje nam wzgl dn
rozdzielczo enkodera po redukcji 188,8 impulsów/na obrót. Numer katalogowy
przekładni 15/5. Maksymalny moment obrotowy, jaki mo e przekładnia przenie to:
dla ruchu ci głego 60 [mNm], dla ruchu start/stop -150 [mNm].
Przekładnia przystosowana do pracy w obydwu kierunkach.
Przesuni cie liniowe jest realizowane poprzez limacznic ( ruba poci gowa).
Jest to limak o nawini ciu po linii rubowej jednego grzbietu o skoku gwintu
P = 0,35[mm] i długo ci 95 [mm].

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
17
Oznacza to, e na 1 [mm] przebytej drogi karetki po limacznicy otrzymamy 2,8571
obrotu.
Uwzgl dniaj c powy sze liczby otrzymujemy:
-rozdzielczo enkodera Re=16
-przeło enie przekładni Pp=11,8:1
-ilo impulsów enkodera na pełen obrót po redukcji (rozdzielczo wzgl dna)
Rw=188,8
-stała układu ilo ci impulsów enkodera na 1 [mm] przesuni cia po rubie Rp=540.
4.2. Oprogramowanie
Program steruj cy został napisany w j zyku programowania C i jest „na stałe”
załadowany w pami ci Mp.
4.2.1. Opis funkcjonalny programu
Po wł czeniu zasilania układ przyst puje do kalibracji. limacznica osi ga skrajn
pozycj osi gaj , po czym ustawia si w stałej odległo ci od kra cówki w punkcie
zero. Pozycja ta oznacza gotowo do przeprowadzenia badania i system oczekuje
na naci ni cie przycisku rozkazu. W dalszej cz ci opisu litera „K” i kolejny numer
b d oznaczały kolejne naci ni cie przycisku rozkazu.
•
K1, układ zostaje wysterowany pr dko ci 25% maksymalnej na odległo 1
centymetra, dokonujemy pomiaru dokładno ci
•
K2, kalibracja układu
•
K3, układ zostaje wysterowany pr dko ci 50% maksymalnej na odległo 1
centymetra, dokonujemy pomiaru dokładno ci
•
K4, kalibracja układu
•
K5, układ zostaje wysterowany pr dko ci 75% maksymalnej na odległo 1
centymetra, dokonujemy pomiaru dokładno ci
•
K6, kalibracja układu
•
K7, układ zostaje wysterowany pr dko ci 100% maksymalnej na odległo 1
centymetra, dokonujemy pomiaru dokładno ci
•
K8, kalibracja układu
•
K9, układ zostaje wysterowany pr dko ci 25% maksymalnej na odległo 1
centymetra,

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
18
•
K10, K11, K12, K13, K14 układ wykonuje cykl przesuni cia wysterowany
pr dko ci 25%, dokonujemy pomiaru powtarzalno ci
•
K15, K16, K17, K18, K19 układ wykonuje cykl przesuni cia wysterowany
pr dko ci 50%, dokonujemy pomiaru powtarzalno ci
•
K20, K21, K22, K23, K24 układ wykonuje cykl przesuni cia wysterowany
pr dko ci 75%, dokonujemy pomiaru powtarzalno ci
•
K25, K26, K27, K28, K29 układ wykonuje cykl przesuni cia wysterowany
pr dko ci 100%, dokonujemy pomiaru powtarzalno ci
•
K30 zerowanie i kalibracja, gotowo do ponownego przeprowadzenia
badania
1.1.1. Dyrektywy define i include
#include <avr\io.h>
#include <inttypes.h>
#include <avr\signal.h>
#include <avr\interrupt.h>
#include <avr\pgmspace.h>//
Instrukcje interpretatora kompilatora oznaczaj , e
program ma korzysta z powy szych bibliotek - typowych dla tego Mp
volatile uint8_t g_bDelay
; // definicja zmiennej typu volatile o długo ci 8 bitów.
Definicja tego typu zmiennej jest konieczna wsz dzie tam gdzie dana zmienna mo e
zmieni si w ka dej chwili, na przykład za pomoc przerwania. Słowo volatile przed
zmienn zakazuje kompilatorowi optymalizacji dost pu do niej. W programie
zmienna ta jest uzale niona od generowanych przerwa z licznika. Nie
zastosowanie volatile spowodowałoby, e stosowane p tle w oparciu o t zmienn
d yłyby do niesko czonego czasu realizacji. Dzieje si tak dlatego e normaln
zmienn kompilator przed u yciem ładuje do rejestru natomiast przerwania
zmieniaj zmienn umieszczon w pami ci danych i nie maj dost pu do kopii
umieszczonej w rejestrze.
volatile uint8_t rozkaz
; // deklaracja zmiennej przechowuj ca nast pny rozkaz do
wykonania, jest to w zasadzie numer kolejnego rozkazu który jest u yty do badania

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
19
parametrów układu i odpowiada naci ni ciu przycisku przez studenta, rozkazów jest
30
volatile uint8_t koniec;
// deklaracja zmiennej przechowuj ca informacj o stanie
wykonywania programu u ywany jako flaga dla ruchu servo, zerowana przez
przerwanie z enkodera czyli z licznika zliczania impulsów enkodera
volatile uint8_t poczatkowe;
// deklaracja zmiennej przechowuj ca informacj
czasowe do pozycjonowania serva ( od kra cówki)
// definiowanie przycisku steruj cego kolejnym rozkazem
#define SWPIN PIND;
// definiujemy własn nazw SWPIN dla portu D (PORTD)
#define PRZYCISK 6;
// definicja nazwy u ywana dla przycisku rozkazu, przycisk
jest podł czony do nó ki 6 portu D
#define KIERUNEK 0
// definicja nazwy odpowiadaj cej za generowanie sygnału
dla ko cówki mocy wej cie PHASE
#define WLACZNIK 1
// definicja nazwy odpowiadaj cej za generowanie sygnału
dla ko cówki mocy wej cie ENABLE
#define KIERUNEK_PRAWO PORTD |= _BV(KIERUNEK) // definicja nazwy
odpowiadaj cej za ustawienie kierunku przesuwania limacznicy, dla tego przypadku
kierunek prawo, OR _BV - ustaw BIT i zrób z tym bitem OR na porcieD (kierunek) -
najmłodszy bit portuD
#define KIERUNEK_LEWO PORTD &= ~_BV(KIERUNEK)// definicja nazwy
odpowiadaj cej za ustawienie kierunku przesuwania limacznicy, dla tego przypadku
kierunek lewo, neguje _BV i ustawia zero na (kierunek)
#define WLACZNIK_ON PORTD &= ~_BV(WLACZNIK) // definicja nazwy
odpowiadaj cej za aktywacje ENABLE na konkretnym pinie
#define WLACZNIK_OFF PORTD |= _BV(WLACZNIK) // definicja nazwy
odpowiadaj cej za deaktywacje ENABLE na konkretnym pinie
#define KRANCOWKA_PRZY_SERWIE 2// definicja nazwy odpowiadaj cej za
wej cie sygnału kra cówki przy serwie na port
#define KRANCOWKA_od_SERWA 3// definicja nazwy odpowiadaj cej za wej cie
sygnału kra cówki od Serwa na port

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
20
4.2.2. Wybrane procedury
Poni ej jest definicja czterech procedur odpowiadaj ca za szybko przesuwu
limacznicy i tak dla mojego systemu wyst puj cztery pr dko ci pracy układu:
wolno, srednio, srednio2 i szybko
.
void serwo_wolno(void)
{
WLACZNIK_ON ; //
g_bDelay = 1;
while(g_bDelay != 0) {}
WLACZNIK_OFF ;
g_bDelay = 30;
while(g_bDelay != 0) {}
}
void serwo_srednio(void)
{
WLACZNIK_ON ;
g_bDelay = 3;
while(g_bDelay != 0) {}
WLACZNIK_OFF ;
g_bDelay = 30;
while(g_bDelay != 0) {}
}
void serwo_srednio2(void)
{
WLACZNIK_ON ;
g_bDelay = 8;
while(g_bDelay != 0) {}
WLACZNIK_OFF ;
g_bDelay = 30;
while(g_bDelay != 0) {}

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
21
}
void serwo_szybko(void)
{
WLACZNIK_ON ;
g_bDelay = 30;
while(g_bDelay != 0) {}
WLACZNIK_OFF ;
}
Kolejne procedury /
Patrz - Zał cznik nr 1, tylko dla zainteresowanych !/ odnosz
si do kalibracji układu i deklaracji długo ci przesuni cia limacznicy.
5. Przebieg wiczenia
5.1. Przygotowanie układu do pracy
Prace z układem rozpoczynamy od wł czenia zasilania. Układ automatycznie si
kalibruje i przechodzi w stan gotowo ci. Program zapisany w pami ci Mp pozwala
nam na badanie parametrów takich jak dokładno i powtarzalno . Kolejne fazy
pracy systemu pozwalaj na „ ci gni cie” charakterystyki pracy dla czterech ró nych
pr dko ci. Pr dko 4 odpowiada maksymalnej pr dko ci, jaka mo e zosta
wygenerowana przez układ. Kolejno pr dko 3 stanowi około 25% maksymalnej,
pr dko 2 stanowi około 10% maksymalnej i pr dko 1 wynosi około 3,5%
maksymalnej. W ramach przygotowania stanowiska do pracy, nale y:
•
wykona ogólne ogl dziny układu w celu sprawdzenia czy układ nie ma
adnych elektrycznych i mechanicznych uszkodze
•
upewni si e jest załadowany oryginalny program do mikroprocesora
•
wło y wtyczk zasilacza do gniazda zasilaj cego - układ powinien dokona
samokalibracji poprzez osi gni cie kra cówki przy serwie SW1
•
sprawd działanie ko cówek i przycisków w kolejno ci SW1, SW2, SW3
o
SW1 – układ powinien si przesun na odległo około 1 [cm] w
prawo
o
SW2 – układ osi ga SW1 i kalibruje si
o
SW3 - nast puje ruch efektora na odległo 1 [cm] w prawo
•
u yj SW2 – układ zostanie wykalibrowany
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
22
•
ustaw wska nik W1 zgodnie z W3
Układ jest gotowy do pracy.
5.2. Badanie dokładno ci
Pomiaru dokonujemy dla czterech pr dko ci przy przesuni ciu 1 [cm]. Układ jest
zasilany i kalibracja została wykonana.
Pr dko 1 – 4% maksymalnej pr dko ci
Pr dko 2 – 10% maksymalnej pr dko ci
Pr dko 3 – 25% maksymalnej pr dko ci
Pr dko 4 – maksymalna predko
Uwaga! Od warto ci pomiarów zawsze odejmujemy wielko 2 [mm], wynika to
z grubo ci wska ników !
Wyniki wpisujemy do tabeli nr1.
Tabela1
Badanie dokładno ci
1
zadane
przesuni cie
zmierzone
przesuni cie
[mm]
[mm]
pr dko 1
10
pr dko 2
10
pr dko 3
10
pr dko 4
10
•
U yj SW3, ustaw W2 zgodnie z W3, dokonaj pomiaru, zapisz wynik w tabeli 1,
pr dko 1
• U yj SW3, układ si wykalibruje
•
U yj SW3, ustaw W2 zgodnie z W3, dokonaj pomiaru, zapisz wynik w tabeli 1,
pr dko 2
• U yj SW3, układ si wykalibruje
•
U yj SW3, ustaw W2 zgodnie z W3, dokonaj pomiaru, zapisz wynik w tabeli 1,
pr dko 3
• U yj SW3, układ si wykalibruje
•
U yj SW3, ustaw W2 zgodnie z W3, dokonaj pomiaru, zapisz wynik w tabeli 1,
pr dko 4
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
23
•
U yj SW3, układ si wykalibruje, układ jest gotowy do nast pnego wiczenia
5.3. Badanie powtarzalno ci
Pomiaru dokonujemy dla czterech ró nych pr dko ci, przy pi ciu cyklach dla ka dej
z nich. Wyniki zapisujemy do tabeli nr2.
Tabela 2
Badanie powtarzalno ci 1
Pr dko
(1,2,3,4)
Poło enie
efektora po
cyklu
wzgl dem
pocz tku
układu [mm]
miejsce
punktu
odniesienia
od pocz tku
układu,
mierzone
[mm]
pomiar 1
pomiar 2
pomiar 3
pomiar 4
pomiar 5
W trakcie badania nale y kolejno wykona :
• U yj SW3, układ ustawi punkt odniesienia, ustaw W1 na lewej skrajnej
pozycji, W2 ustaw zgodnie z W3, dokonaj pomiaru i wynik zapisz w kolumnie
„miejsce punktu odniesienia od pocz tku układu, mierzone”, (zdj cie
poni ej)

Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
24
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 1, pomiar1
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 1, pomiar2
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 1, pomiar3
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 1, pomiar4
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 1, pomiar5,
•
Pomiar pr dko 2
•
Zapisz ten sam wynik w tabeli 2 dla pr dko ci 2, w kolumnie
„miejsce
punktu odniesienia od pocz tku układu, mierzone”
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 2, pomiar1
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 2, pomiar2
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 2, pomiar3
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 2, pomiar4
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 2, pomiar5
•
Pomiar pr dko 3
•
Zapisz ten sam wynik w tabeli 2 dla pr dko ci 3, w kolumnie „miejsce
punktu odniesienia od pocz tku układu, mierzone”
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 3, pomiar1
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 3, pomiar2
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 3, pomiar3
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
25
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 3, pomiar4
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 3, pomiar5
•
Pomiar pr dko 4
•
Zapisz ten sam wynik w tabeli 2 dla pr dko ci 4, w kolumnie
„miejsce
punktu odniesienia od pocz tku układu, mierzone”
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 4, pomiar1
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 4, pomiar2
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 4, pomiar3
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 4, pomiar4
•
U yj SW3, układ wykona cykl, ustaw W2 zgodnie z W3, dokonaj pomiaru i
zapisz wynik w tabeli 2, pr dko 4, pomiar5
• U yj SW3, układ si wykalibruje
Wykona punkt trzeci dla odległo ci przesuwu i pr dko ci 1, 2 ,3 ,4 zadanej
przez prowadz cego wiczenie. W celu dokonania wymaganych zmian nale y
posłu y si instrukcjami wgranymi do komputera PC na stanowisku –
a) INSTRUKCJA DO PRZYGOTOWANIA RODOWISKA PROGRAMISTYCZNEGO
DLA KONTROLERA ATMEGA16
b) INSTRUKCJA OBSŁUGI
RODOWISKA NA POTRZEBY WYKONANIA
WICZENIA LABORATORYJNEGO
c) BADANIA DOKŁADNO CI UKŁADU STEROWANIA PRZEMIESZCZENIEM
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
26
6. Opracowanie sprawozdania
6.1. W sprawozdaniu nale y zamie ci :
1. Schemat blokowy stanowiska
2. Zarejestrowane dane z pomiarów:
a) badanie dokładno ci – Tabela nr 1
b) badanie powtarzalno ci –Tabela nr 2
3. Wyznaczone charakterystyki :
a) wykres dokładno w funkcji pr dko ci
b) wykres powtarzalno ci w funkcji dokładno ci
4. Wnioski z punktów 2 i 3.
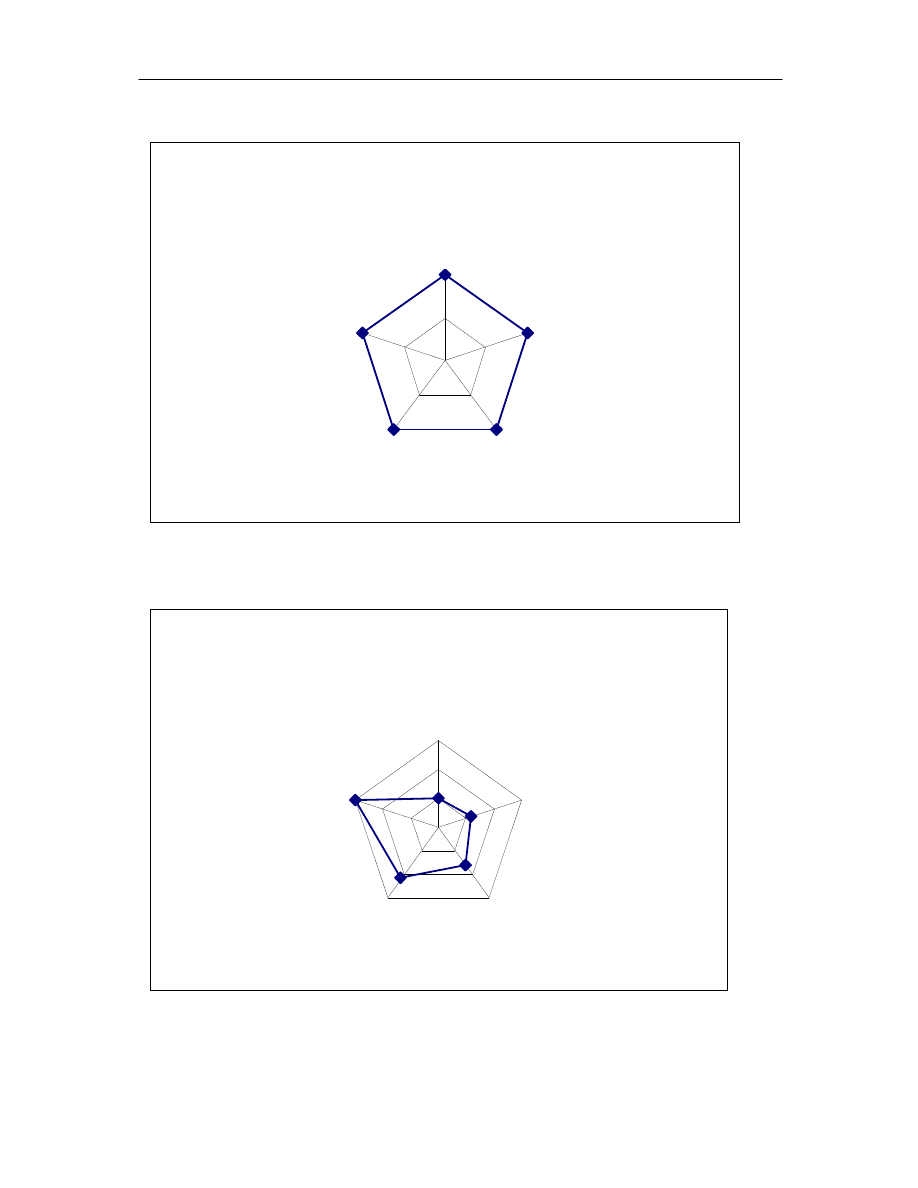
6.2. Przykładowe charakterystyki do punktu 3:
Wykres obrazuj cy dokładno układu w zale no ci od pr dko ci:
Badanie dokładno ci 1
8
10
12
pr dko 1
pr dko 2
pr dko 3
pr dko 4
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
27
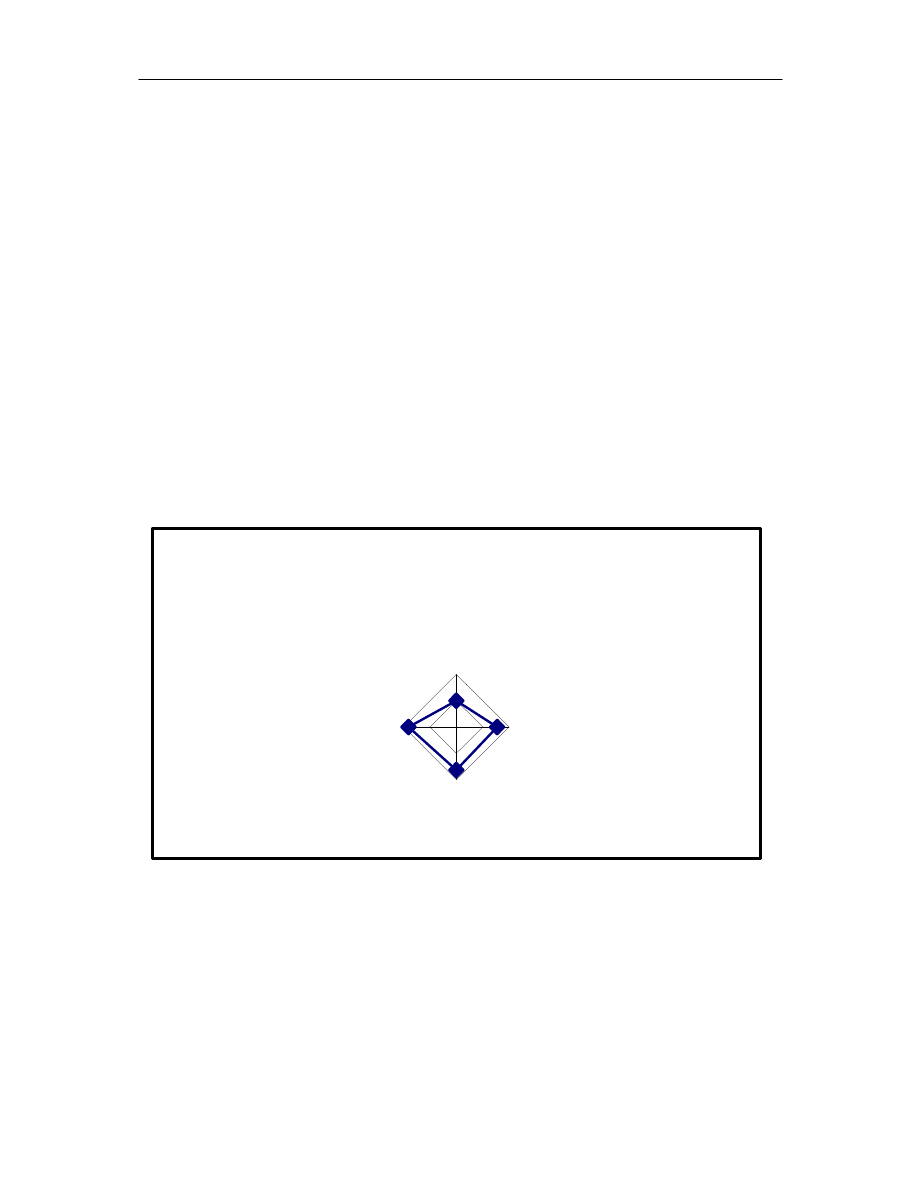
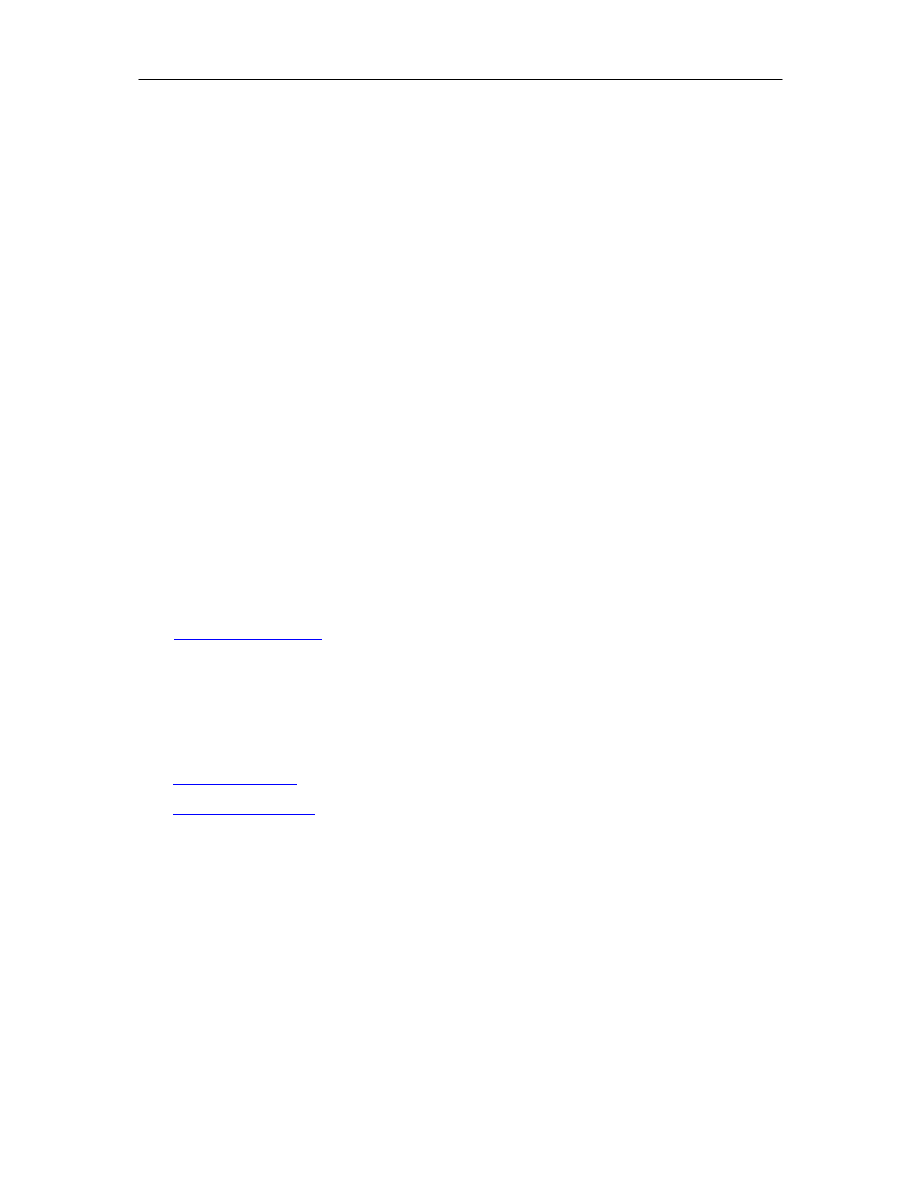
Graficzne przedstawienie powtarzalno ci dla pr dko ci 1:
Badanie powtarzalno ci 1 - pr dko 1
26
26,2
26,4
pomiar 1
pomiar 2
pomiar 3
pomiar 4
pomiar 5
Wyniki pomiaru powtarzalno ci dla pr dko ci 3:
Badanie powtarzalno ci 1 - pr dko 3
26,5
27
27,5
28
pomiar 1
pomiar 2
pomiar 3
pomiar 4
pomiar 5
Sterowanie w systemach mechatronicznych – wiczenia laboratoryjne
28
8. Literatura uzupełniaj ca
[1] Bodo Heimann, Wilfried Gerth, Karl Popp MECHATRONIKA Komponenty metody
przykłady
[2] Tony L. Hansen C++ zadania i odpowiedzi
[3] Jan Malinowski POMIAR DŁUGO CI I K TA
[4] Jerzy Kostro ELEMENTY URZADZENIA I UKŁADY AUTOMATYKI
[5] C. J. Chesmond CONTROL SYSTEM TECHNOLOGY
[6] Jan Barczak: AUTOMATYZACJA PROCESÓW DYSKRETNYCH
[7] Tadeusz Wróbel: SILNIKI SKOKOWE
[8] Praca zbiorowa pod redakcj Urszuli Kr glewskiej PODSTAWY STEROWANIA
wiczenia laboratoryjne
[9] Zbigniew Zajda Ludwik ebrowski URZ DZENIA I UKŁADY AUTOMATYKI
[10] Zdzisław Budnicki Teoria i algorytmy sterowania
[11] F. Siemieniako, M. Gawrysiak: AUTOMATYKA I ROBOTYKA - PODR CZNIK
DLA TECHNIKUM
[12] Marek Gawrysiak AUTOMATYKA I ROBOTYKA
[13]
www.faulhaber.com
[14]
Integrated Publishing 1998: http://www.tpub.com/neets/book5/index.htm
[15]
Brian Rhoney, Chad Zimmer, Derek Murr Principles of AC, DC, Linear, Step, and
Servo Motors
[16]
http://allegromicro.com
[17]
www.drives.co.uk
[18]
WWW.NEAT.COM
Motion Control Handbook
[19] http://www.atmel.com/dyn/products/product_card.asp?PN=ATmega16
Wyszukiwarka
Podobne podstrony:
Bad sil szer nap
Bad sil pierścieniowego
Bad Sil pierścieniowy 1
Kopia ściąga bmikroskopowe stali węglowych wyżarzonych i żeliw, Elektrotechnika, dc pobierane, pnom
Bad sil klatkowego
sprawozdanie badanie mikroskopowe, Elektrotechnika, dc pobierane, pnom wimir, PNOM, bad mikros
Bad sil szeregowego zasilanego impulsowo, Politechnika Radomska
Bad sil szer nap
BAD WYKŁAD SIECI 2
wyklad3 tech bad
Napęd i ster
BM 4 Bad motywacyjne FGI IDI
wyklad 29 i 30 tech bad
67 Sposoby obliczania sił kształtowania plastycznego ppt
3 kanał ster świateł dysko
więcej podobnych podstron