2014-06-02
1
A
ktuatory elektryczne
Przetworniki elektrodynamiczne
Do przetwarzania energii elektrycznej na mechaniczną wykorzystuje się
oddziaływanie pól elektromagnetycznych.
Zastosowanie:
rotacyjne maszyny elektryczne (silniki), napędy liniowe, głośniki)
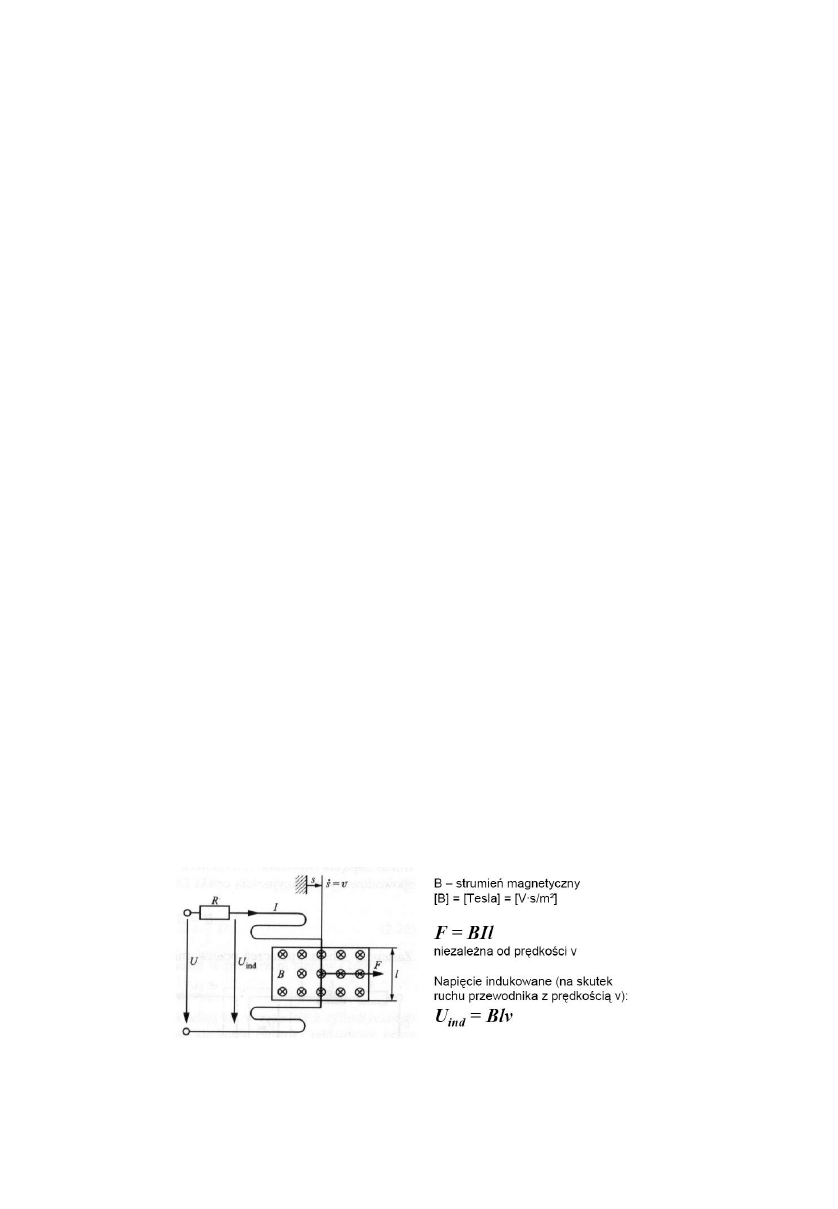
Przetworniki elektrodynamiczne w
ykorzystują działanie siły LORENTZA,
gdy przewodnik z prądem porusza się w polu magnetycznym.
W maszynie elementarnej przyjmuje się stałe w czasie jednorodne pole
magnetyczne o gęstości strumienia B
2014-06-02
2
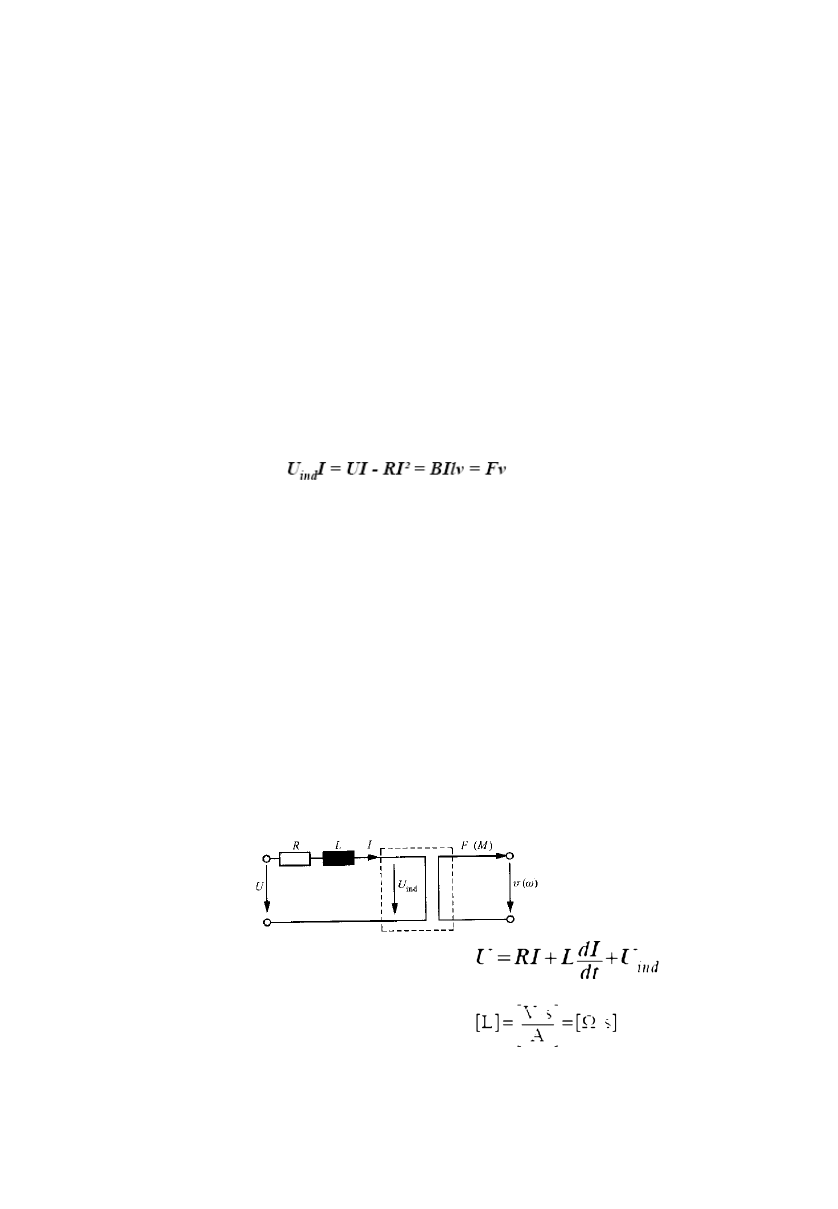
Bilans napięcia:
U=RI+U
ind
Bilans mocy:
Pwej U I
; P.str R I
2
P.el
U.ind I
P.el
P.wej P.str
P.el
P.wyj
P.wyj
F v
- skuteczna moc elektryczna
Uzyskana moc mechaniczna:
Przetworniki elektrodynamiczne
Dla cewki z n zwojami:
Cewka cechuje się spadkami
napięcia na uzwojeniach:
U
ind
=nBlv
Schemat połączeń przetwornika elektrodynamicznego :
Przetworniki elektrodynamiczne
2014-06-02
3
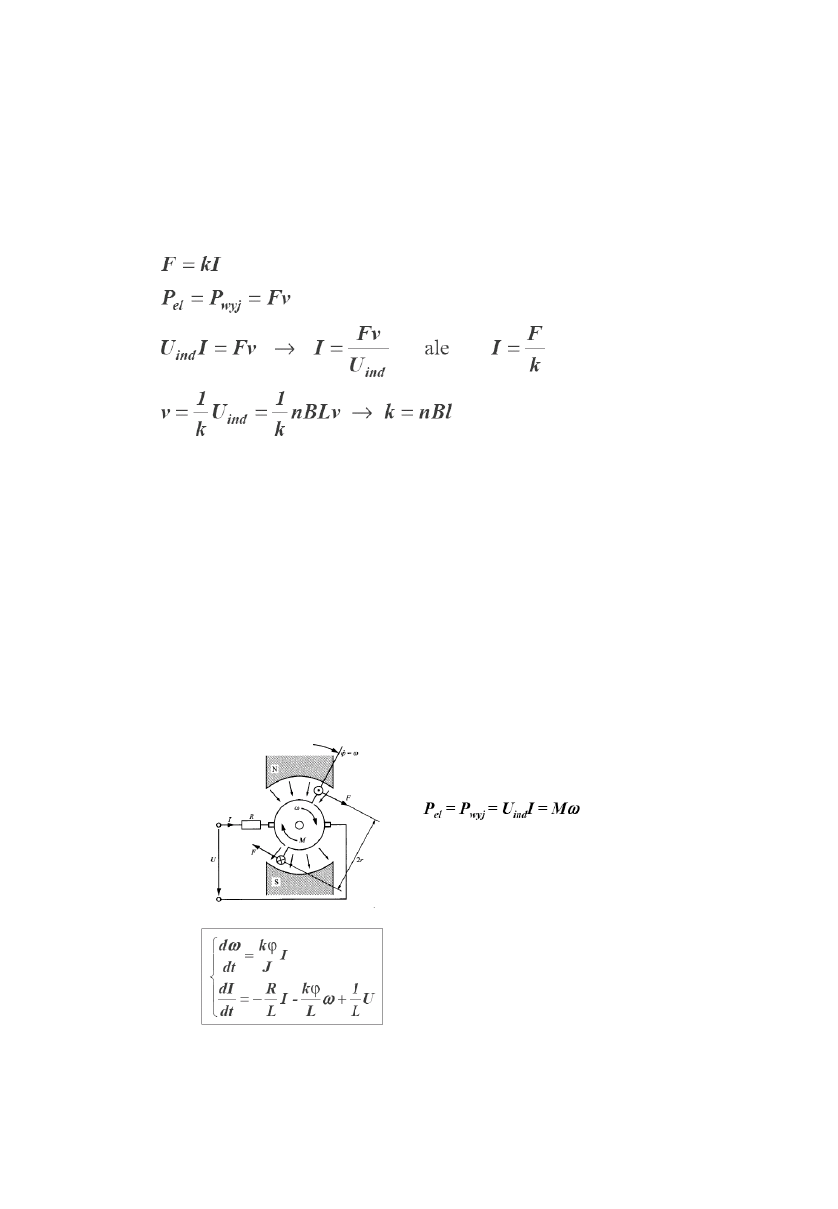
siła proporcjonalna do natężenia prądu
Przetworniki elektrodynamiczne
Prostokątna ramka z przewodników
osadzona na wirniku obraca się w
stałym polu magnetycznym.
Ze wzrostem kąta obrotu φ do
wartości 0.5π (położenie poziome)
nie zmienia się kierunek
działania siły, trzeba zmienić
kierunek pola magnetycznego
lub kierunek prądu w przewodniku.
Dokonuje się zmiany kierunku
przepływu prądu za pomocą komutatora.
Bezwładność wirnika jest tutaj elementem
zapewniającym płynny ruch obrotowy.
Model matematyczny
Przetworniki elektrodynamiczne
2014-06-02
4
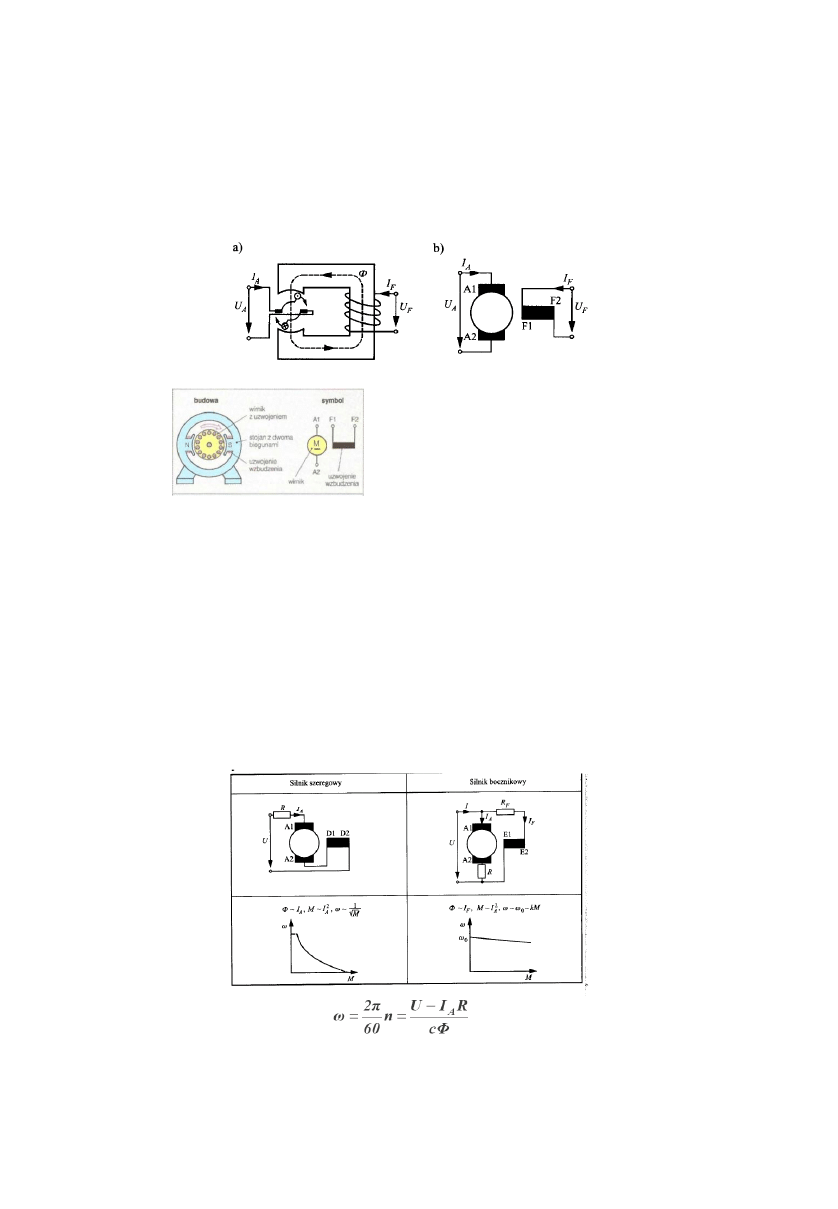
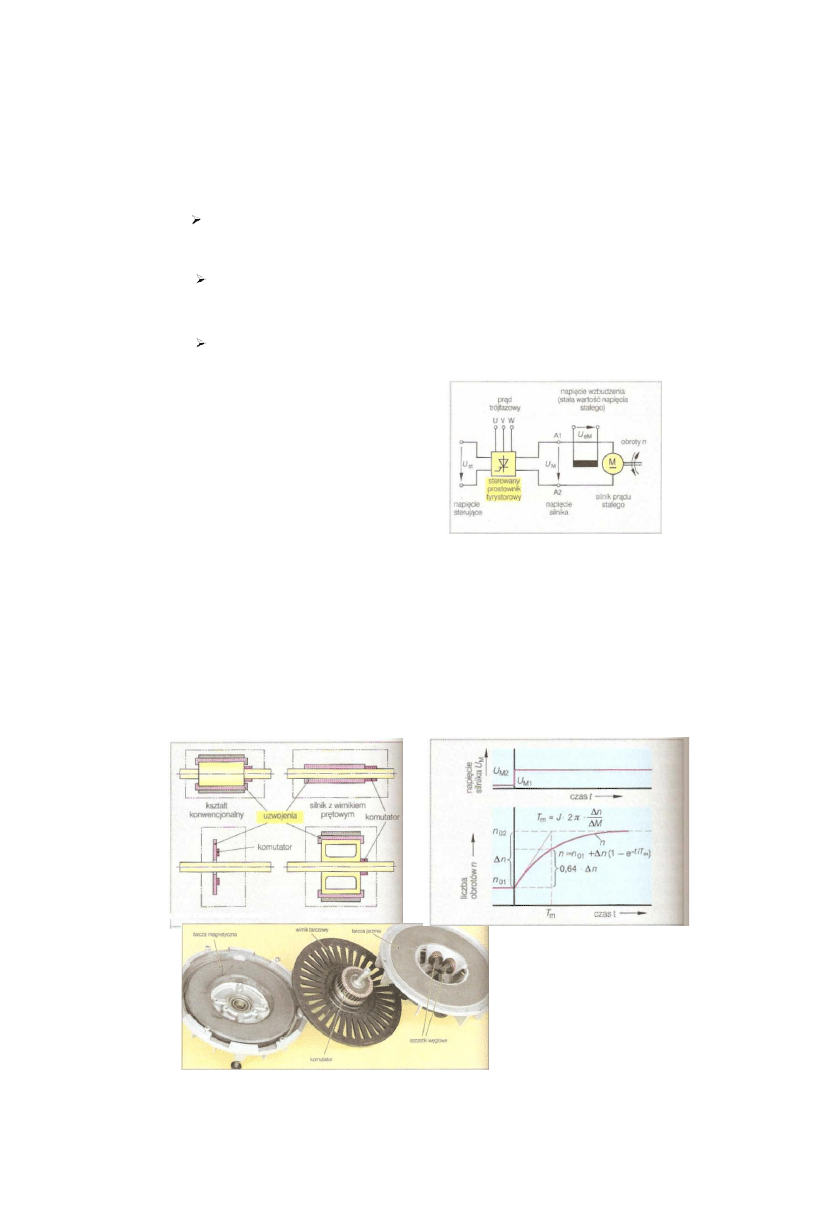
Silniki prądu stałego
Silnik obcowzbudny:
Przez uzwojenia w stojanie płynie prąd lF. Wytwarza
on pole magnetyczne o strumieniu magnetycznym
Φ, który przez szczelinę powietrza przenika wirnik.
Równocześnie
przez
uzwojenie
w
wirniku
przepływa prąd lA i wskutek siły Lorentza wywołuje
moment obrotowy silnika. W układzie napięcie
zasilania twornika (wirnika) UF jest niezależne od
napięcia zasilania stojana UA.
W układach rzeczywistych zwykle stojan i twornik
zasilane są z jednego źródła napięcia:
Silniki prądu stałego
2014-06-02
5
Regulacja obrotów:
regulacja pola: zmiana
prądu stojana wpływa na strumień
magnetyczny i przez to na
prędkość obrotową,
regulacja
oporności: zmiana oporności R za pomocą
oporności wstępnej powoduje zmianę prędkości
obrotowej (ale
pociąga za sobą straty),
regulacja
napięcia: zmiana napięcia U na zaciskach daje
zmianę prędkości obrotowej bez strat.
Sterowanie prędkością obrotową
za pomocą nastawnika tyrystorowego:
Silniki prądu stałego
Budowa silników elektrycznych
prądu stałego
Stała czasowa dla silników o
specjalnej budowie wynosi
od 4 ms do 40 ms
2014-06-02
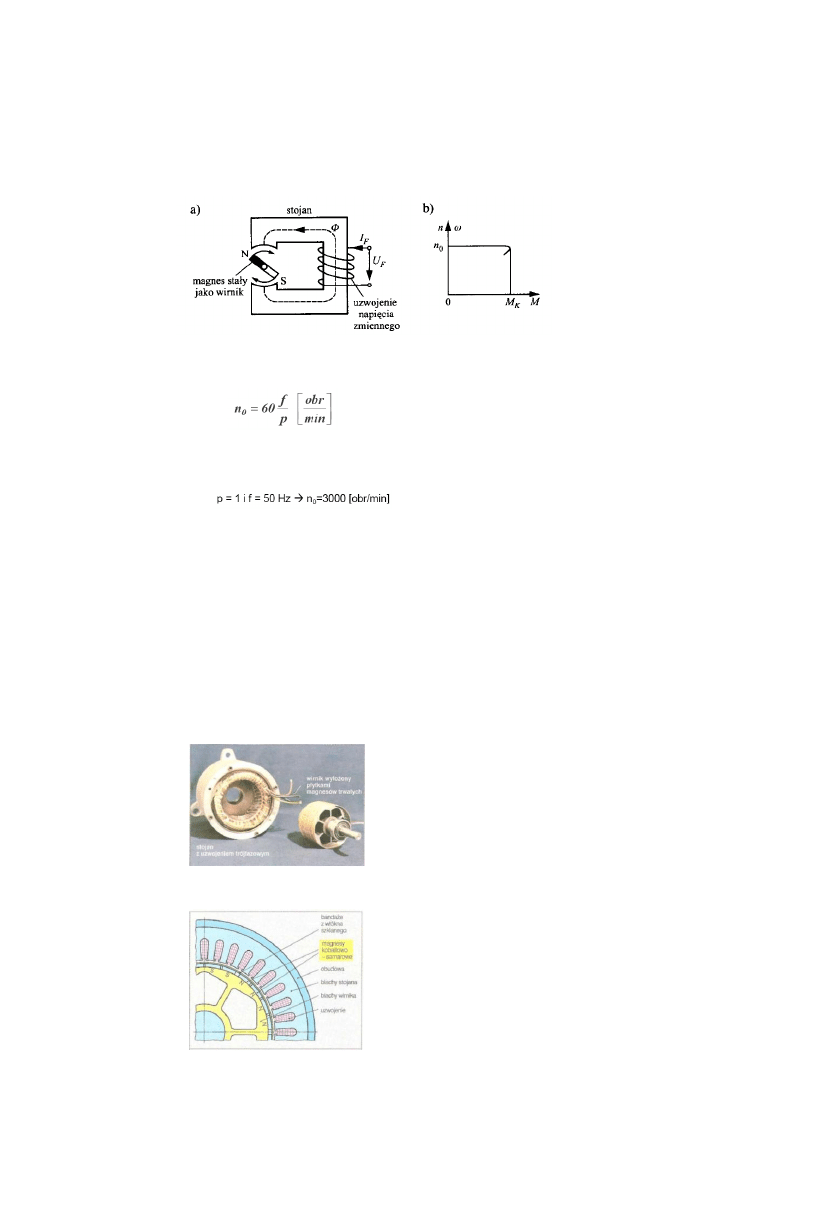
6
Charakterystyka silnika
synchronicznego:
Moment M jest osiągany przy liczbie
obrotów n0, dlatego silnik nie może sam
ruszyć z miejsca. Konieczny jest silnik
rozruchowy lub uzwojenie
asynchroniczne doprowadzające
prędkość obrotową wirnika do
wirowania pola magnetycznego.
Silniki prądu zmiennego (z polem wirującym)
Stojan z uzwojeniami
zasilanymi prądem
zmiennym.
Wirnik - magnes o
stałym kierunku pola
Prędkość obrotowa:
f- częstotliwość,
p - liczba par biegunów stojana.
dla
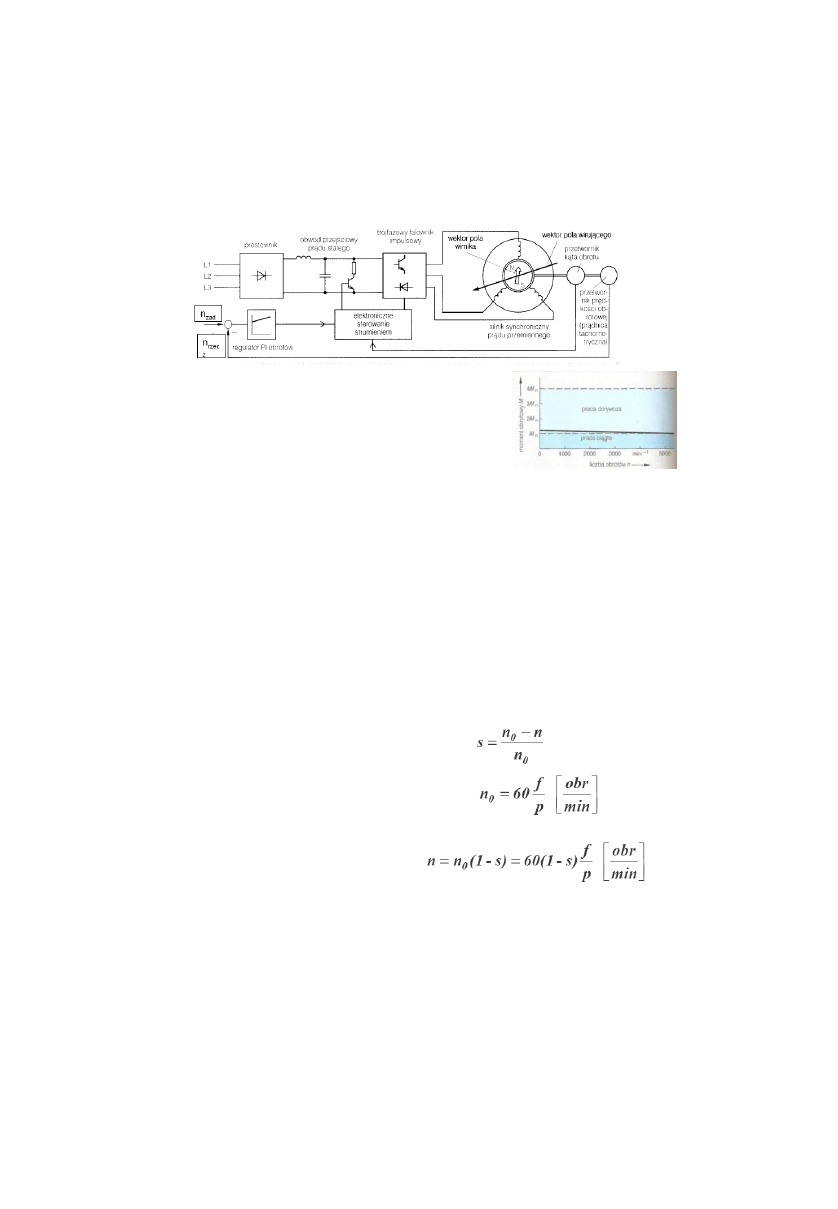
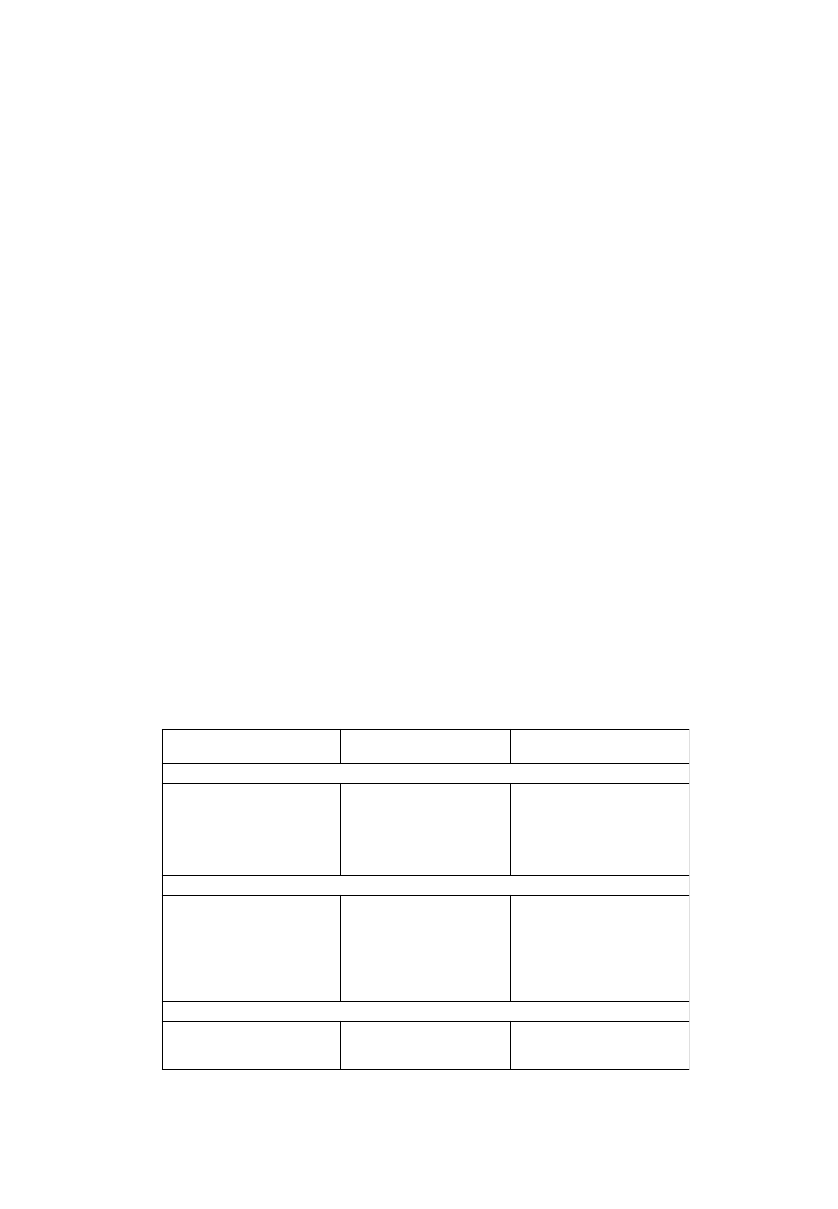
SILNIK SYNCHRONICZNY z elektroniczną komutacją
Silnik synchroniczny prądu przemiennego
z prawie pustym wirnikiem i trwałymi magnesami
Trójfazowy silnik synchroniczny
Zalety synchronicznego silnika prądu
przemiennego:
• mniejsze wymiary od silnika prądu stałego,
• bardzo mały czas reakcji,
• bardzo duży zakres nastawianych obrotów (do 1:
20000), tzn. że najniższe obroty, przy których
silnik obraca się jeszcze równomiernie, są 20000
razy mniejsze od obrotów maksymalnych,
• małe nakłady na konserwację, brak zużycia np.
szczotek węglowych,
• komutacja nie ogranicza momentu obrotowego,
• lepsze niż w silniku prądu stałego odprowadzanie
ciepła, ponieważ w stojanie jest tylko jedno
uzwojenie,
• wyższa sprawność niż w silniku prądu stałego,
• zamknięta zabudowa, stopień bezpieczeństwa IP
65 (ochrona przed zakurzeniem i bryzgami
wody),
• większa żywotność niż dla silnika prądu stałego,
• ze względu na brak konieczności zasilania
wirnika konstrukcja jest prosta i solidna,
• mniejszy ciężar od silnika prądu stałego.
2014-06-02
7
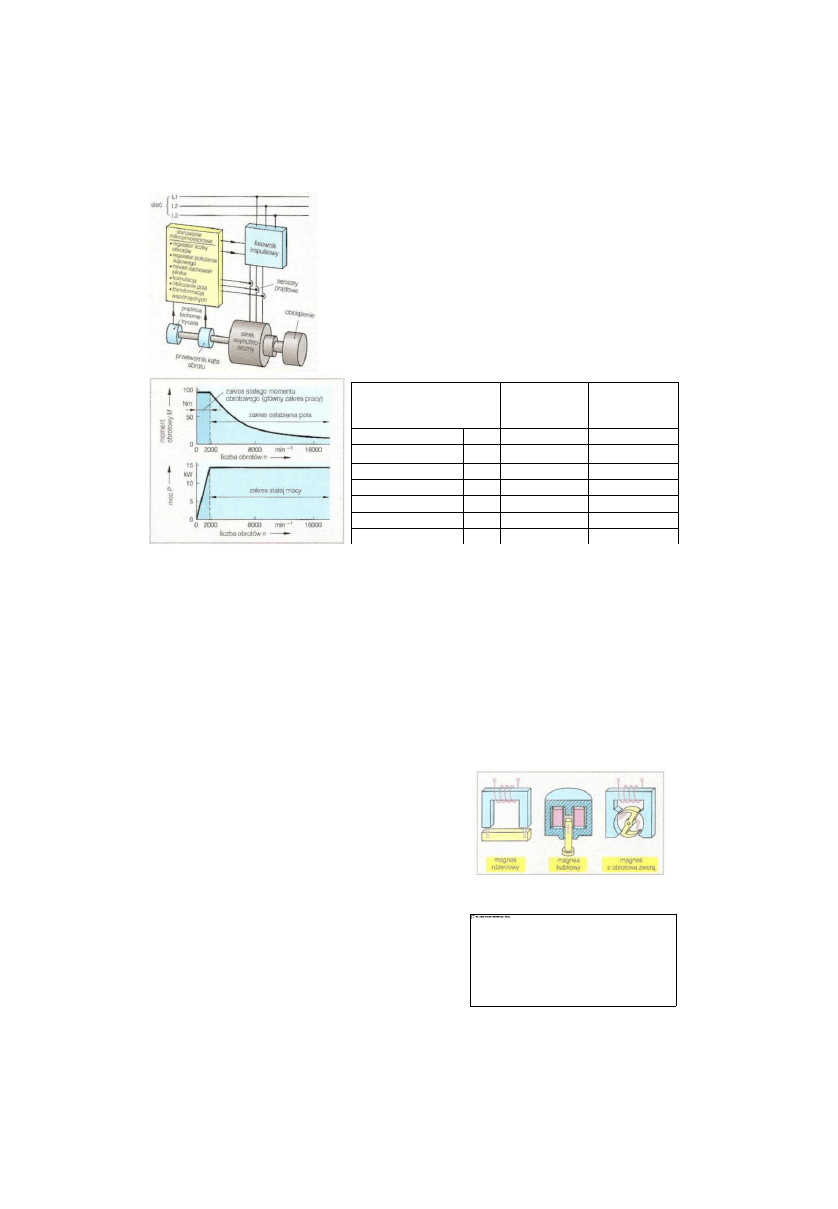
Układ regulacji obrotów:
Zasilanie prądem trójfazowym z sieci
1. Falownik przetwarza prąd z sieci na prąd
stały, a następnie na prąd trójfazowy zależnie od nastaw z
układu sterowania.
2. Kontrolowany jest kąt obrotu i odpowiednio do niego
jest sterowane wirowanie strumienia (regulator PI
obrotów)
Zastosowanie: napędy posuwu, napędy ruchu obrotowego
Zakres obrotów i
obciążalność silnika
SILNIK SYNCHRONICZNY z elektroniczną komutacją
Silniki prądu zmiennego (z polem wirującym)
Napięcie indukowane Uind zależy
od poślizgu:
n - prędkość obrotowa wirnika,
n
0
- prędkość obrotowa pola wirującego.
Prędkość obrotowa wirnika:
Układ regulacji obrotów:
1. Przełączenie liczby biegunów.
2. Regulacja częstotliwości.
3. Regulacja poślizgowa poprzez zmianę poślizgu s.
W silnikach z pierścieniami ślizgowymi połączonymi z przewodnikami
wirnika silnika istnieje możliwość połączenia dodatkowej oporności wstępnej.
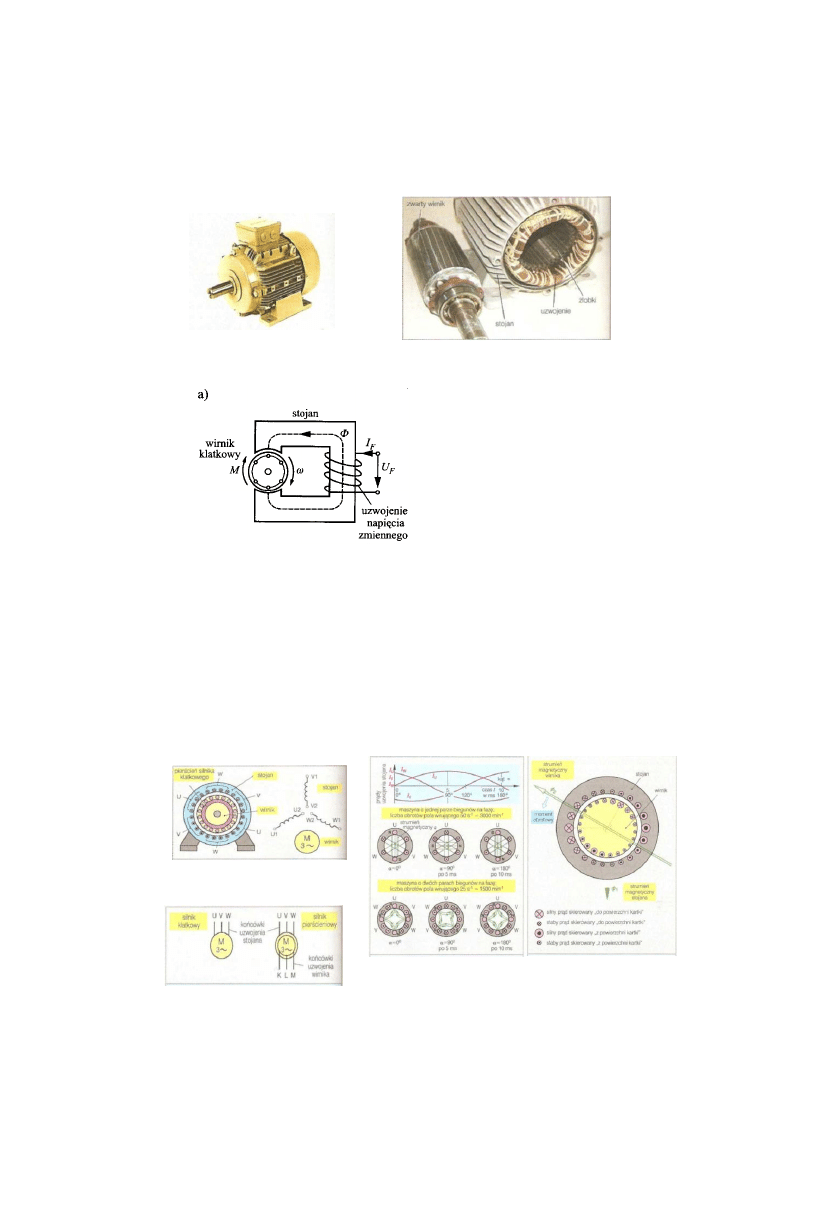
SILNIK ASYNCHRONICZNY
2014-06-02
8
Silniki prądu zmiennego (z polem wirującym)
SILNIK ASYNCHRONICZNY
Zamiast wirnika w postaci magnesu stałego - wirnik z przewodnikami
W przewodnikach wirnika
indukuje się napięcie Ujnd,
układ nie wymaga więc
zasilania.
Wirujące pole indukuje prąd.
Asynchroniczny silnik trójfazowy
Zwarty wirnik i stojan silnika klatkowego
SILNIK ASYNCHRONICZNY
Schemat budowy asynchronicznego
silnika
Symbole silników
Strumień magnetyczny w stojanie i
wirniku silnika
2014-06-02
9
liczba biegunów
2
4
6
8
10
12
24
liczba uzwojeń
3
6
9
12
15
18
36
obroty pola
wiruj
ącego (mim
1
)
3000
1500
1000
750
600
500
250
Liczba obrotów pola wirującego uzwojenia zasilanego z sieci 50 Hz
SILNIK ASYNCHRONICZNY
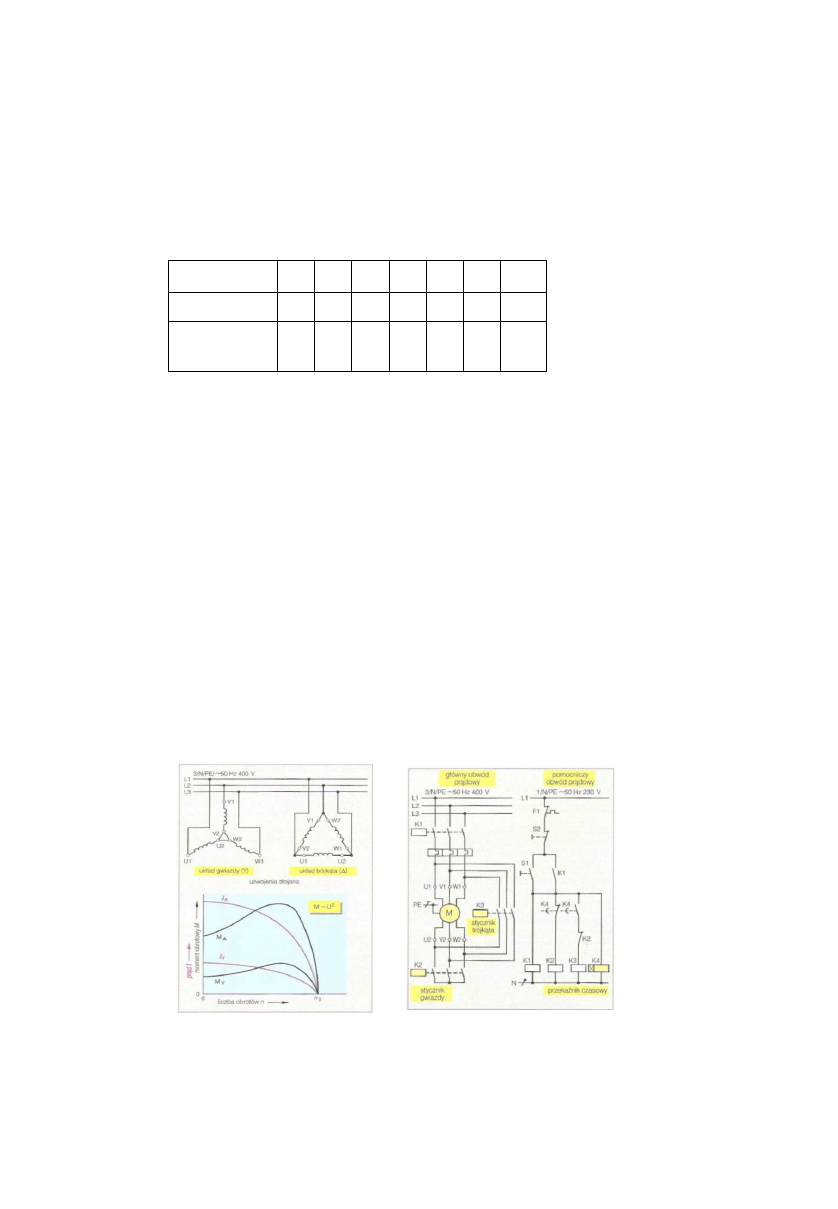
SILNIK ASYNCHRONICZNY
Stycznikowy układ rozruchu gwiazda-trójkąt
Układy połączeń w gwiazdę i w trójkąt
2014-06-02
10
Typowe dane
maty
duży
charakterystyczne
silnik
silnik
moc znamionowa
Pn
1,1 kW
110kW
obroty synchroniczne "s
3000 min
-1
3000 min-'
obroty znamionowe
n
n
2850 min
-
1
2980 min
-
1
poślizg znamionowy
5%
0,6%
poślizg krytyczny
s
k
ok. 20%
ok. 10%
wsp. sprawności
h
77%
95%
moment znamionowy
3,7 Nm
353 Nm
moment krytyczny
M
k
2,3 M
n
2,8 M
n
moment bezwładności J
0,001 kgm
2
1,3 kgm
2
masa
m
9,9 kg
790 kg
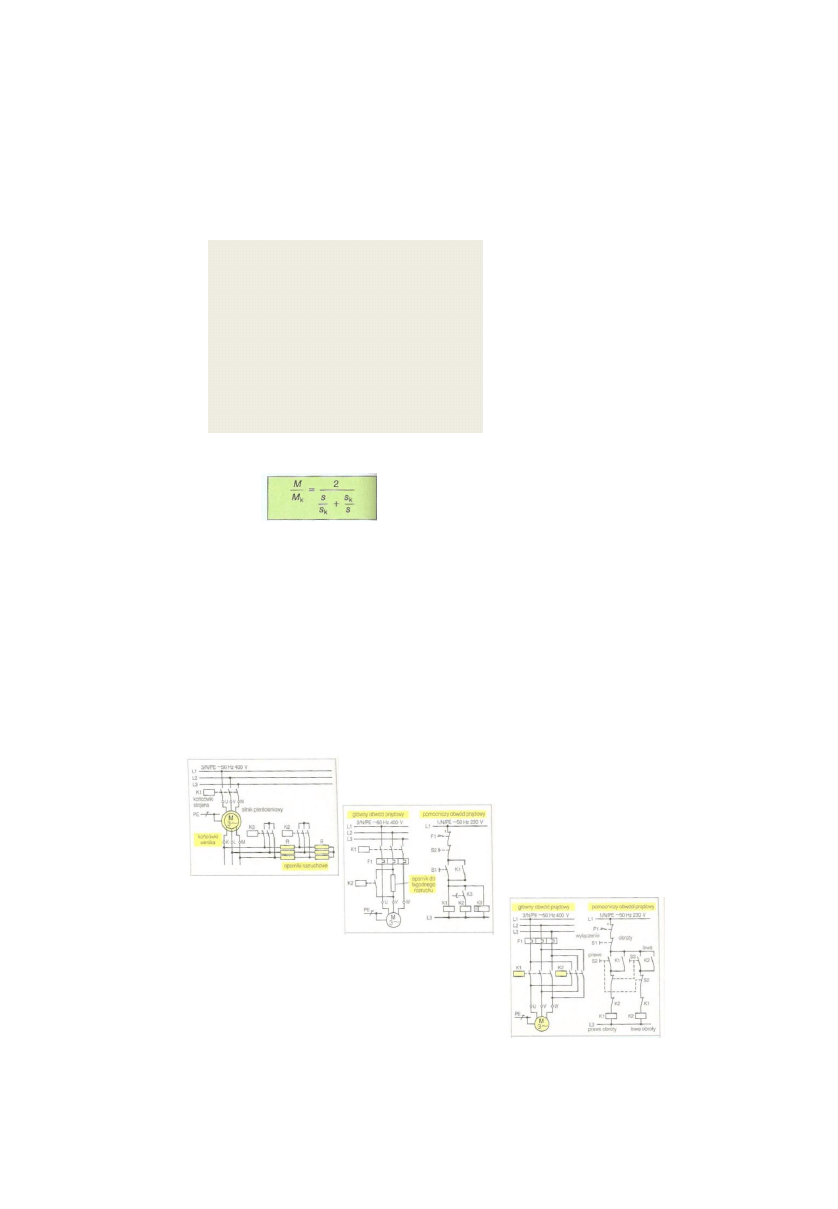
Dla charakterystyki obroty I moment obrotowy
obowiązuje następująca zależność:
SILNIK ASYNCHRONICZNY
SILNIK ASYNCHRONICZNY
Układ rozruchowy silnika
pierścieniowego
Układ do łagodnego rozruchu
silników klatkowych
Stycznikowy układ nawrotny
2014-06-02
11
Silnik asynchroniczny z komutacja
elektroniczną
typowe dane
charakterystyczne
zwykły zakres
obrotów
wyższy
zakres
obrotów
moc znamionowa
Pn
30 kW
14 kW
obroty znamionowe
n
n
1500 min
-1
1500 min
-1
obroty maksymalne
n
max
8000 min
-1
16000 min
-1
moment znamion.
M
n
190 Nm
70 Nm
moment bezwładn.
J
97-10
-3
kgm
2
46 • 10
-3
kgm
2
masa
m
150 kg
90 kg
prąd znamionowy
I
str
102 A
58 A
Zalety silników asynchronicznych z komutacją elektroniczną
są podobne do zalet silnika synchronicznego:
• małe nakłady na konserwację i eksploatację,
• wysoki współczynnik sprawności,
• duża szybkość reakcji,
• małe wymiary,
• odporność na krótkotrwałe, nawet 10-krotne przeciążenia,
• silnik spełnia wymagania IP 65.
Elektromagnesy i sprzęgła
elektromagnetyczne
Urządzenia wykonawcze zbudowane na bazie
elektromagnesów składają się z cewki z żelaznym
rdzeniem i ruchomego żelaznego rdzenia zwanego
zworą. Przepływ prądu przez cewkę powoduje
przyciąganie zwory. Zwora ustawia się tak, aby
istniał najmniejszy opór magnetyczny dla linii
strumienia
magnetycznego.
Rozróżnia
się
elektromagnesy podnoszące z przesuwającą się
zworą i elektromagnesy obrotowe ze zworą
obrotową.
Ruchoma zwora ustawia się tak, aby opór
magnetyczny był jak najmniejszy.
Sprzęgła elektromagnetyczne stosuje się do
zdalnego lub samoczynnego przełączania lub
hamowania
przekładni.
Wśród
sprzęgieł
elektromagnetycznych
rozróżnia
się
sprzęgła
jednotarczowe, wielopłytkowe, proszkowe i zębate.
Elektromagnesy podnoszące i obrotowe
Jednotarczowe sprzęgło elektromagnetyczne
2014-06-02
12
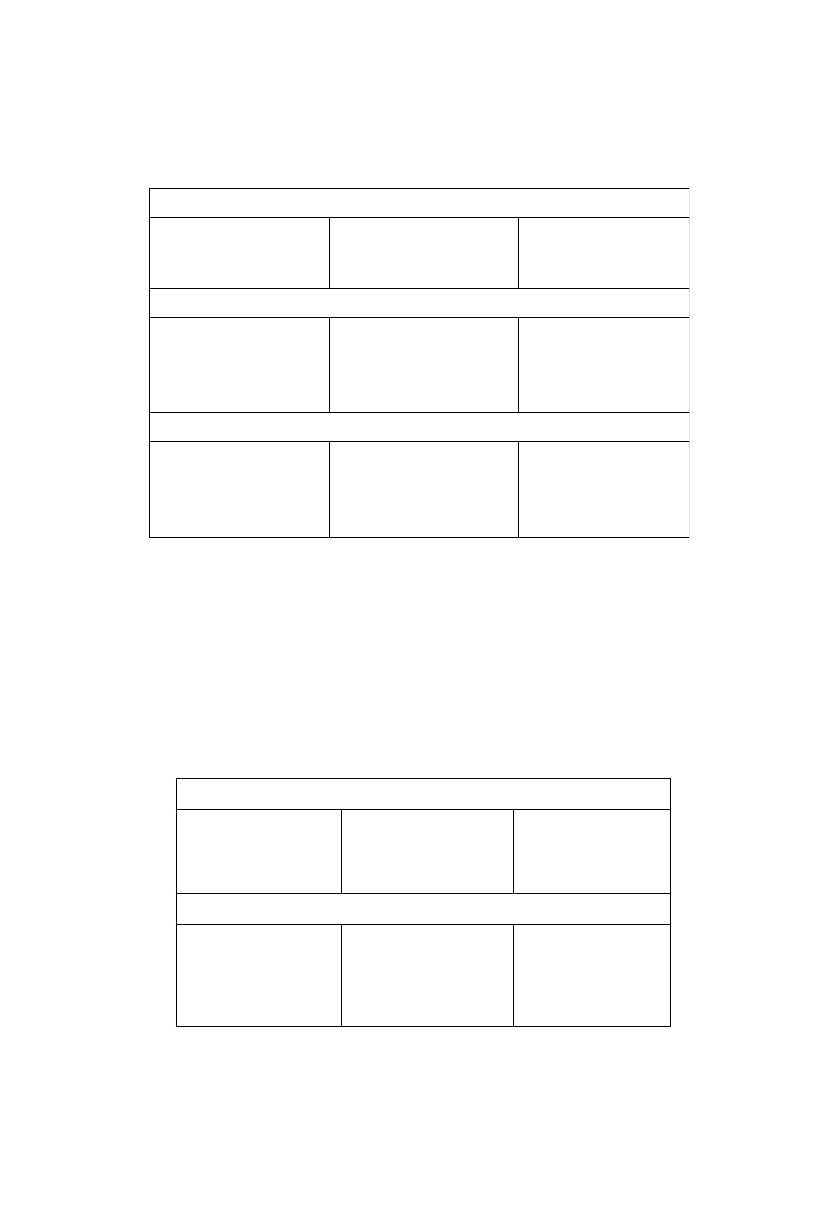
Aktuatory nowego rodzaju
Zjawisko fizyczne
Dane techniczne (wartości
orientacyjne)
Zastosowania
aktuatory piezoelektryczne
przy przyłożeniu napięcia
elektrycznego do plasterkowatego
piezokryształu występuje zmiana
grubości (na podstawie
odwrotnego efektu
piezoelektrycznego)
napięcie znamionowe 800-
1500V
znamionowa droga nastawiania
70-200
m
m
częstotliwość własna 2-50 kHz
translatory sztaplowe (stosowe) i
pasmowe, elementy gnące, silnik
falowy (ang. inchworm motor),
silnik naddźwiękowy,
wytwarzanie kropli atramentu w
drukarce
aktuatory magnetostrykcyjne
przy przyłożeniu pola
magnetycznego do kryształów
ferromagnetycznych występuje
zmiana długości, przy
niezmiennej objętości (na
podstawie efektu
magnetostrykcyjnego)
prąd 2 A
wzbudzenie 50 kA/m
znamionowa droga nastawiania
50
m
m
obciążenie 500 N
częstotliwość własna >1 kHz
translatory (nie jest wymagana
budowa sztaplowa), silnik falowy
(robaczkowy), zawór wtryskowy
do paliwa dieslowskiego, aktywne
tłumiki drgań
aktuatory elektroreologiczne
przy przyłożeniu pola elektrycz-
nego niektóre ciecze wykazują
zwiększenie lepkości
napięcie tnące na natężenie pola
600-800 Pa/(kV/mm)
sprzęgła przełączające, zawory,
łożyska silników, tłumiki uderzeń
Aktuatory nowego rodzaju
2014-06-02
13
Aktuatory nowego rodzaju
aktuatory magnetoreologiczne
przy przyłożeniu pola magnetycz-
nego niektóre ciecze wykazują
zwiększenie lepkości
podobnie
jak
aktuatory
elektroreologiczne
aktuatory termobimetaliczne
dwa sztywno połączone ze sobą
metale o różnych
rozszerzalnościach cieplnych przy
podgrzewaniu wykrzywiają się
wykrzywienie jednostkowe
28,5 • 10-
6
l/K
moduł sprężystości 170-10
3
N/mm
2
dopuszczalne naprężenie zginające
200 N/mm
2
przełączniki
termiczne
wszystkich rodzajów dla małych
sił nastawiania
aktuatory ze stopów z pamięcią kształtu
nadane w pokojowej temperaturze
odkształcenie części
konstrukcyjnej, wykonanej ze
stopu z pamięcią kształtu, znika
podczas podgrzewania
możliwy jest efekt jedno- i
dwukierunkowy
temperatura przemiany -100°C do
+100°C
przegrzanie około -160°C do
+400°C
przełączniki
termiczne
wszelkiego
rodzaju,
człony
nastawcze o małej dynamice
Aktuatory nowego rodzaju
aktuatory z materiałów rozszerzalnych termicznie
podczas podgrzewania
materiału występuje silne
zwiększenie jego objętości
temperatura pracy około -20°C
do +120°C
skok 5-25 mm
siła nastawcza 250-500 N
czas reakcji 8-50 s
proste napędy nastawcze dla
grzejników,
urządzenia
startowe
dla
silników
gaźnikowych
aktuatory elektrochemiczne
przy przyłożeniu małego
napięcia prądu stałego
występuje w określonych
materiałach wydzielanie gazu,
co prowadzi do wzrostu
ciśnienia
napięcie 1,6-2,2 V
prąd 1-4 A
skok 4 mm
ciśnienie 4 bar (0,4 MPa)
proste
napędy nastawcze,
zawory
grzejników,
urządzenia
pozycjonujące,
regulacja dostarczania paliwa
do układów spalania
2014-06-02
14
Zjawisko
piezoelektryczności zostało odkryte w 1880 roku przez Pierre'a i Jacques'a
Curie.
Zauważyli oni, że kwarc zmienia swoje wymiary pod wpływem działania pola
elektrycznego na
odwrót, generuje ładunek elektryczny na skutek deformacji
mechanicznej. Po raz pierwszy zjawisko to
zostało wykorzystane praktycznie w 1920
roku przez Langevina,
który wykonał kwarcowy nadajnik i odbiornik dźwięków
podwodnych - pierwszy sonar. Pierwsze piezoelektryczne
materiały opracowano w
latach czterdziestych XX wieku (tytanian baru) i
pięćdziesiątych (cyrkonian-tytanian
ołowiu - PZT). Rok 1965 to początek produkcji pierwszych urządzeń wykorzystujących
właściwości ceramiki piezoelektrycznej.
Materiały piezoelektryczne przetwarzają
energię elektryczną w mechaniczną i
odwrotnie.
Odkształcenia
sprężyste
piezoelektryka
wywołuje w nim powstanie
wewnętrznego pola elektrycznego (efekt
piezoelektryczny prosty) lub umieszczenie
materiału w polu elektrycznym prowadzi do
zmiany
jego
wymiarów
(efekt
piezoelektryczny
odwrotny).
Zjawisko
piezoelektryczne posiada inny mechanizm
niż
zjawisko elektrostrykcji,
które charakteryzują
znacznie mniejsze
odkształcenia i występuje
ono we wszystkich
materiałach.
Aktuatory
piezoelektryczne
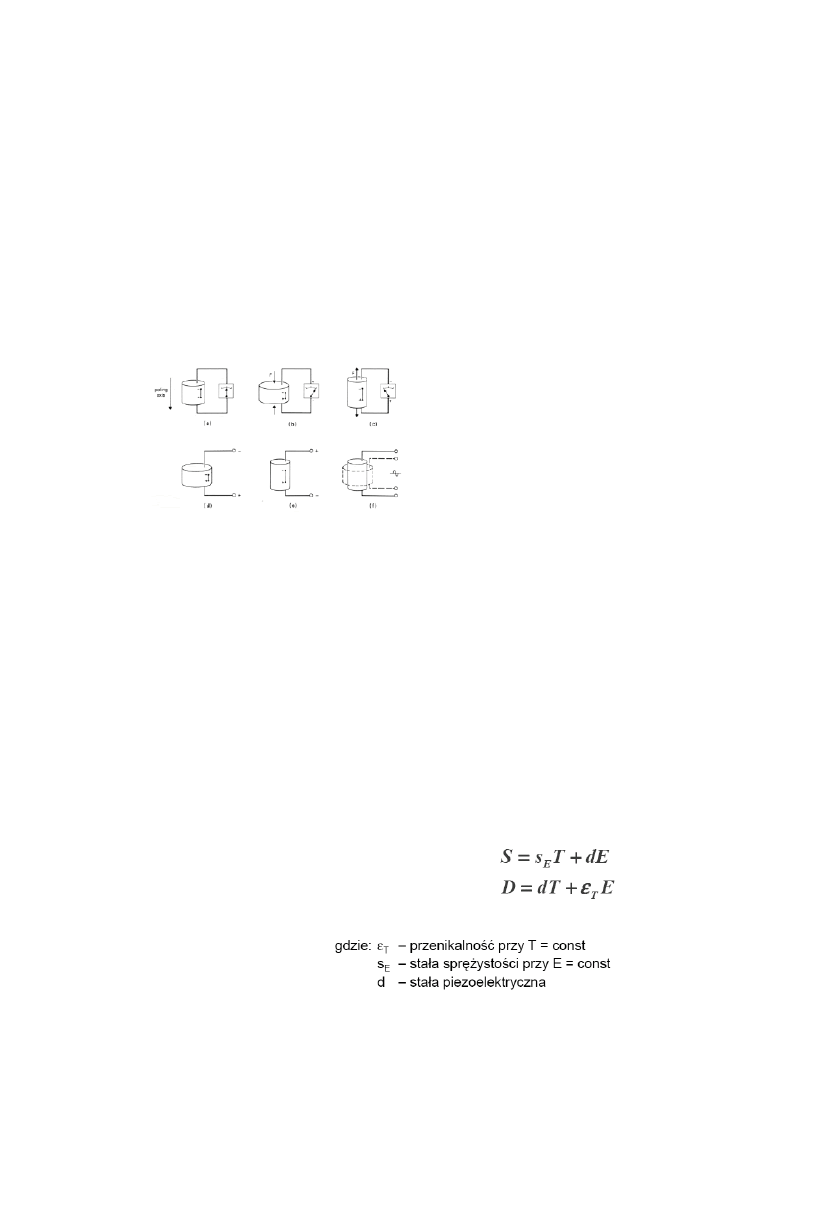
Podstawy przetworników piezoelektrycznych
Przyjmując do analizy tylko jeden kierunek polaryzacji lub działania siły, oraz
oznaczając:
S - deformacje mechaniczne,
D -
indukcję elektrostatyczną,
T -
naprężenia mechaniczne,
E -
natężenie pola elektrycznego
Efekt piezoelektryczny można opisać jako:
Aktuatory
piezoelektryczne
2014-06-02
15
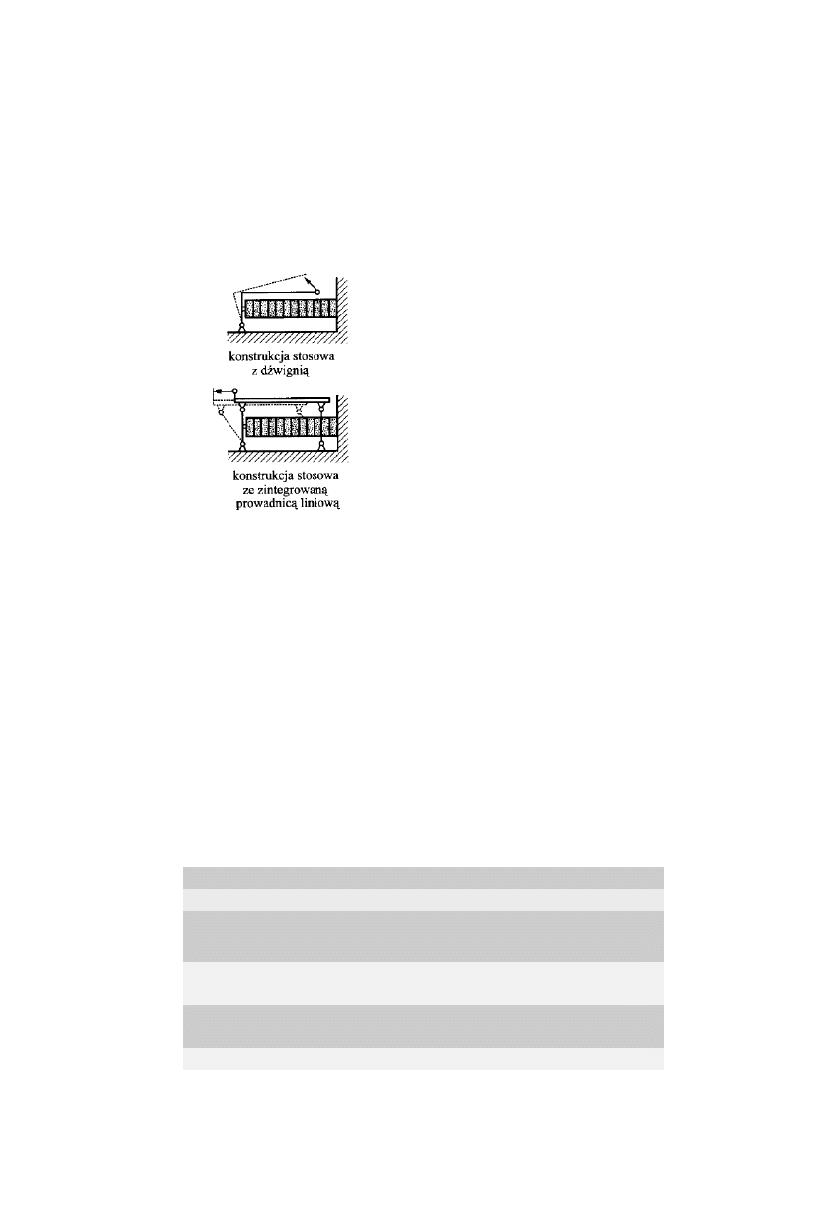
Konstrukcja hybrydowa
Łączy w sobie efekt piezoelektryczny i
mechaniczne
przełożenie dźwigniowe,
pozwala to
zwiększyć drogę nastawiania.
Konstrukcja wymaga
konieczności
kasowania
luzów w przegubach, gdyż
powoduje to zmniejszenie
dokładności
działania aktuatora.
Droga nastawiania
zależy od długości pasm.
Aktuatory
piezoelektryczne
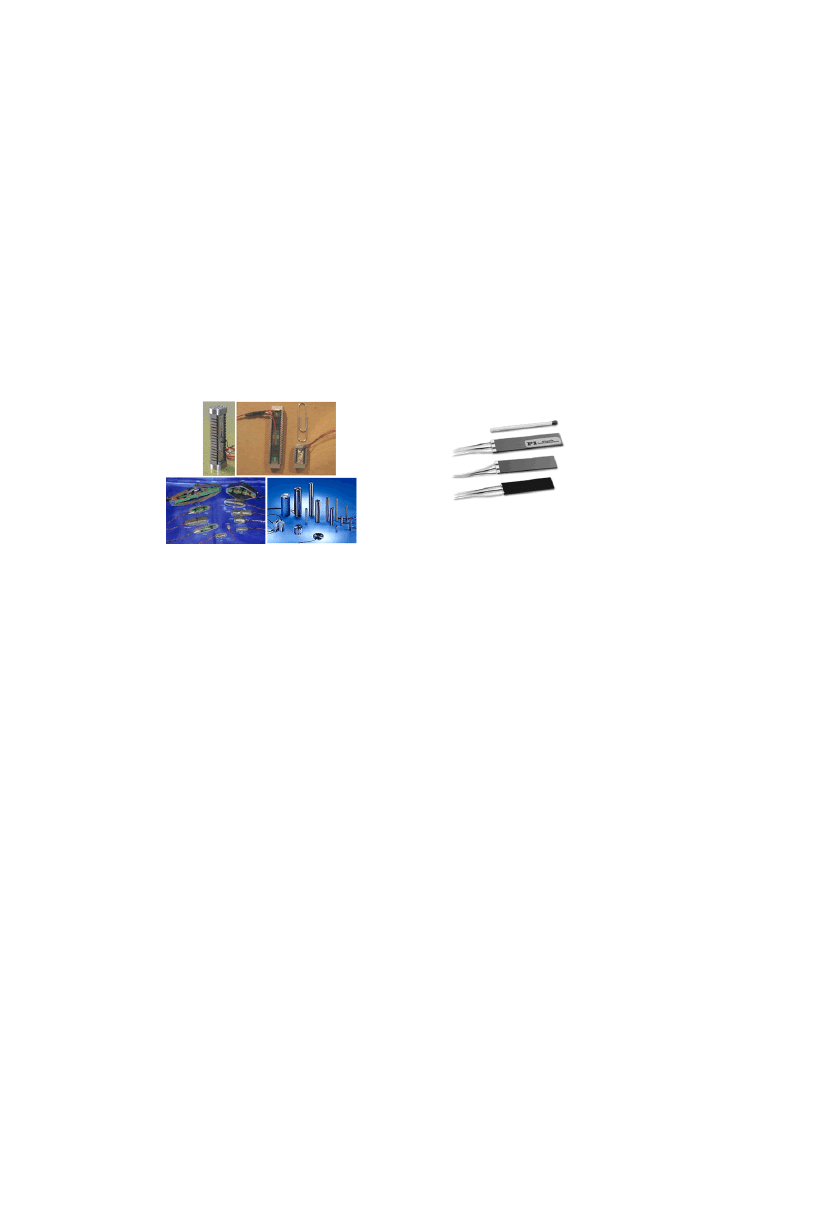
Aktuatory
piezoelektryczne
Zastosowania ceramicznych
materiałów piezoelektrycznych
Materiały piezoelektryczne znajdują zastosowanie w wielu urządzeniach. Zjawisko zamiany energii,
jakie
dają materiały piezoelektryczne, pozwala na uzyskanie za pomocą odpowiednich urządzeń
pewnych
użytecznych efektów: energia elektryczna przetwarzana jest na działanie mechaniczne
(wydłużenie, zginanie, skręcanie, drgania) - aktuatory lub oddziaływanie mechaniczne jest
rejestrowane przez powstanie efektu elektrycznego - sensory.
Najczęściej wymieniane obszary
zastosowań materiałów piezoelektrycznych to automatyzacja, mikromanipulacja, techniki
pomiarowe (np.
nieniszczące badania wad w materiałach) i medyczne (np. diagnostyczne techniki
ultradźwiękowe). Szybko rozwijającą się dziedziną zastosowań materiałów piezoelektrycznych są
systemy monitorowania stanu
materiałów i konstrukcji.
Typowe zastosowania ceramiki piezoelektrycznej
Wykorzystane zjawisko
Zakres zastosowań
Efekt piezoelektryczny prosty
Odbiorniki dźwięku, mikrofony, hydrofony, generatory energii
elektrycznej, generatory iskry, sensory (ciśnienia akustycznego,
drgań)
Efekt piezoelektryczny odwrotny
Nadajniki dźwięku, silniki piezoelektryczne, piezoelektryczne
transformatory, serwomechanizmy, aktuatory
Rezonans piezoelektryczny
Rezonansowe stabilizatory częstotliwości, rezonansowe sensory
ciśnienia, wilgoci i temperatury, filtry piezoelektryczne
Elektrostrykcja
Filtry piezoelektryczne, wzmacniacze
2014-06-02
16
Aktuatory
piezoelektryczne
Rozwój materiałów piezoelektrycznych jest obecnie stymulowany przede wszystkim przez
zapotrzebowanie na nowe aktuatory - elementy o ogromnym znaczeniu dla rozwoju
zaawansowanych urządzeń mechanicznych. Aktuatory w zależności od konstrukcji dzielą się na
kilka typów:
-
aktuatory "bimorph" składają się z dwóch warstw ceramiki piezoelektrycznej polaryzowanej w
przeciwnych kierunkach,
- aktuatory "unimorph" -
warstwa ceramiki połączona jest z warstwą metalu
-
aktuatory typu "raibow", w których zmianę właściwości warstwy wierzchniej uzyskuje się przez
chemiczną redukcję powierzchni piezoelektrycznego materiału ceramicznego. Dzięki temu uzyskuje
się warstwy zintegrowane chemicznie o dużej wytrzymałości powierzchni rozdzielającej,
-
aktuatory typu "FG" złożone z warstw ceramicznych o różnych właściwościach,
-
aktuatory "thunder" złożone są z warstwy ceramiki PZT z metalicznymi okładkami oddzielonymi od
ceramiki warstwą adhezyjną,
-
aktuatory "LIPCA", w których na jednaj powierzchni elementu ceramicznego (PZT) wytarza się
kompozyt węglowo-epoksydowy, a na drugiej szklano-epoksydowy.
Wyszukiwarka
Podobne podstrony:
elementy mroczka pytania mix by czaku, PWr, IV Semestr, Elementy Elektroniczne
elementy elektroniczne
Elementy elektroniczne stosowane w UTK
Elementy Elektroniczne
M5 Charakterystyki podstawowych elementów elektronicznych, AGH, MiBM - I rok, Elektrotechnika, Spraw
Pomiary charakterystyk elementów elektronicznych
Tranzystor to półprzewodnikowy element elektroniczny
Elementy elektroniczne
Podstawowe elementy elektroniczne
4 2 Elementy Elektrochemii Ogniwa
mroczka, PWr, IV Semestr, Elementy Elektroniczne
Modelowanie układów logicznych na elementach elektronicznych
Elementy Elektroniczne test
juniewicz,elektrotechnika L, Tranzystor jako element elektroniczny spr
modelowanie ukladow logicznych w oparciu o elementy elektroniczne
Egzaminacyjne dane przez Pluta, WAT- Elektronika i Telekomunikacja, Semestr II, Elementy elektronicz
4 1 Elementy Elektrochemii reakcje redoks
Egzamin Elementy Elektroniczne 18 01 2012 sdc
więcej podobnych podstron