1
Mechanika ogólna
Wykład nr 13
Zjawisko tarcia. Prawa tarcia.
2
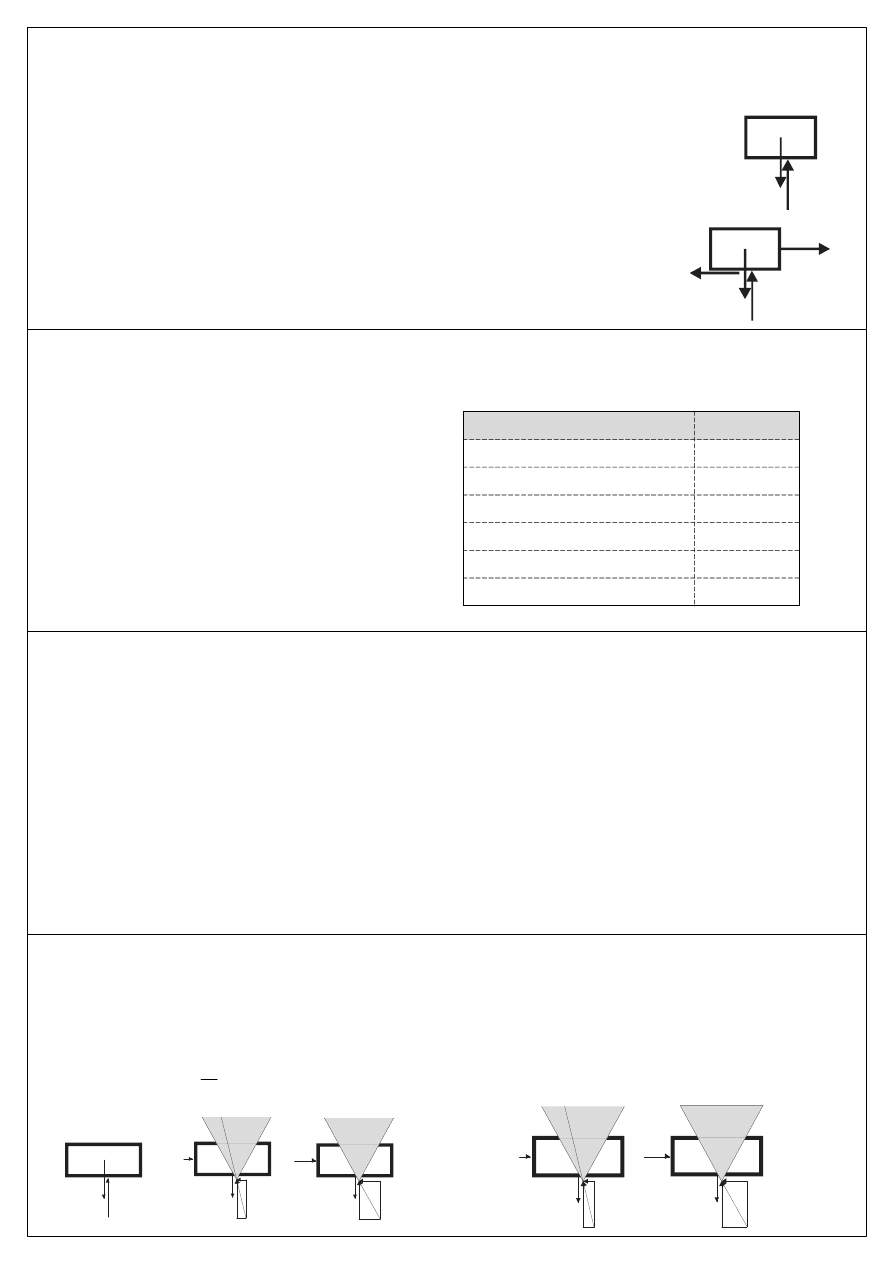
Więzy z tarciem
n
W więzach, w których nie
występuje tarcie, reakcja jest
prostopadła do płaszczyzny
styku ciał (nacisk).
n
W więzach z tarciem
dochodzi jeszcze jedna
reakcja, równoległa do
płaszczyzny styku.
mg
N
mg
N
T
P
3
Prawa tarcia statycznego
Coulomba i Morena
n
Siła tarcia jest zawsze przeciwna do
występującego lub ewentualnego
ruchu.
n
Wielkość siły tarcia jest niezależna
od pola powierzchni stykających się
ciał, zależy jedynie od rodzaju
powierzchni.
n
Zależność między naciskiem i siłą
tarcia:
T
N
µ
= ⋅
4
Współczynnik tarcia
Rodzaj powierzchni
µ
Stal-stal
0,15
Stal-żeliwo
0,18
Żeliwo-żeliwo
0,45
Metal-drewno
0,5-0,6
Drewno-drewno
0,65
Skóra-metal
0,6
5
Tarcie statyczne i
kinetyczne
n
Tarcie występuje w przypadku
układów poruszających
(kinetyczne) lub w układach,
w których ruch jest potencjalnie
możliwy, ale jeszcze do niego
nie dochodzi (statyczne).
6
Tarcie statyczne
n
Tarcie statyczne
przeciwdziałające wystąpieniu
ruchu zwiększa się w wyniku
przyłożenia siły od 0 do wartości
maksymalnej (tarcie całkowicie
rozwinięte).
7
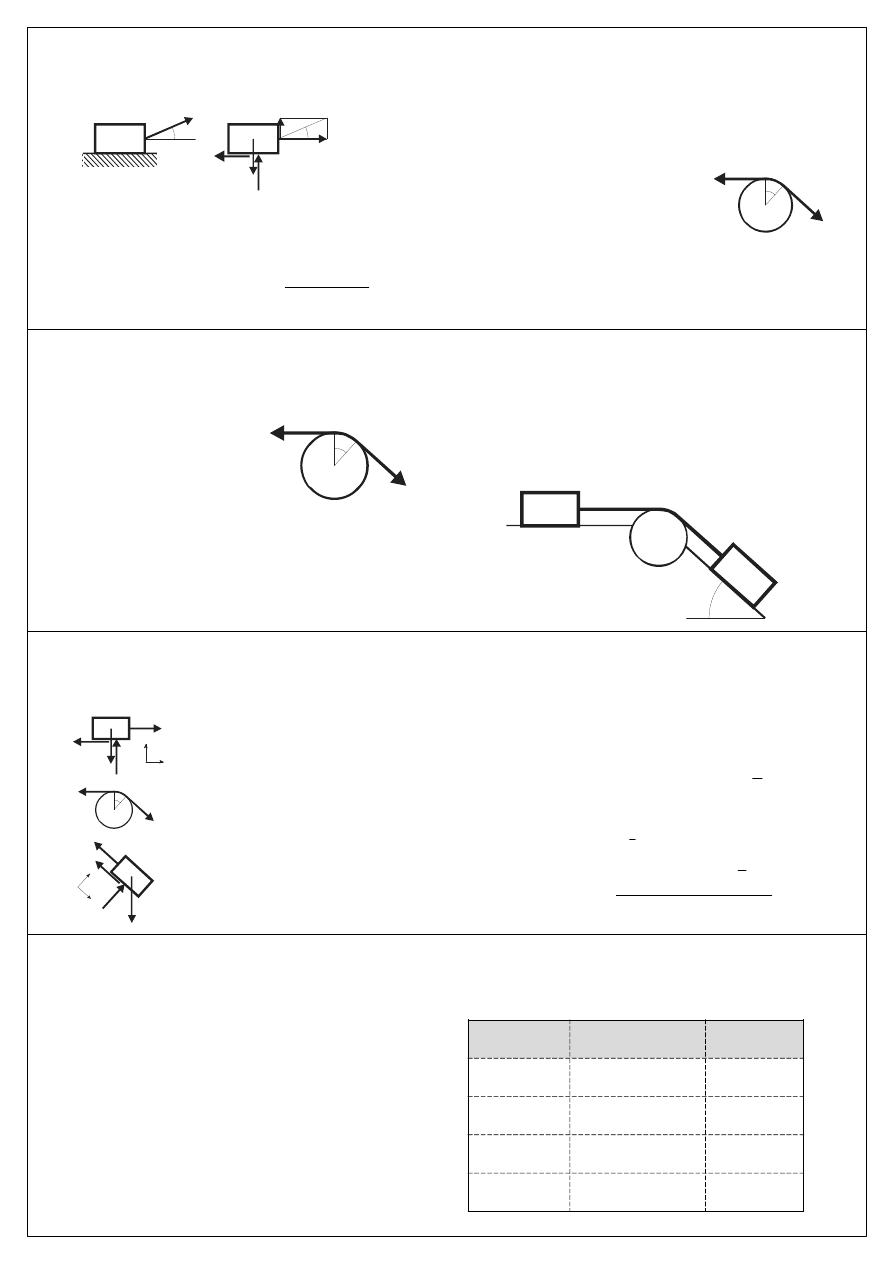
Kąt tarcia
n
Kąt między reakcją pionową a siłą
tarcia nazywany jest kątem tarcia:
=tg
T
N
µ
φ
=
mg
N
mg
N
T
P
R
mg
N
T
P
R
8
Stożek tarcia
n
Linia działania wypadkowej reakcji zawarta
jest wewnątrz, lub w przypadku tarcia
całkowicie rozwiniętego, na powierzchni
stożka nazywanego stożkiem tarcia.
mg
N
T
P
R
mg
N
T
P
R
9
Tarcie ślizgowe - przykład
α
µ
m
α
mg
N
T
Pcos
α
Psin
α
P
0 :
cos
0
X
P
T
α
=
− =
∑
0 :
sin
0
Y
P
N
m g
α
=
+ − ⋅ =
∑
T
N
µ
= ⋅
n
Prawo tarcia:
sin
N
m g
P
α
= ⋅ −
(
)
sin
cos
m g
P
P
µ
α
α
⋅ −
=
sin
cos
m g
P
µ
µ
α
α
⋅ ⋅
=
+
10
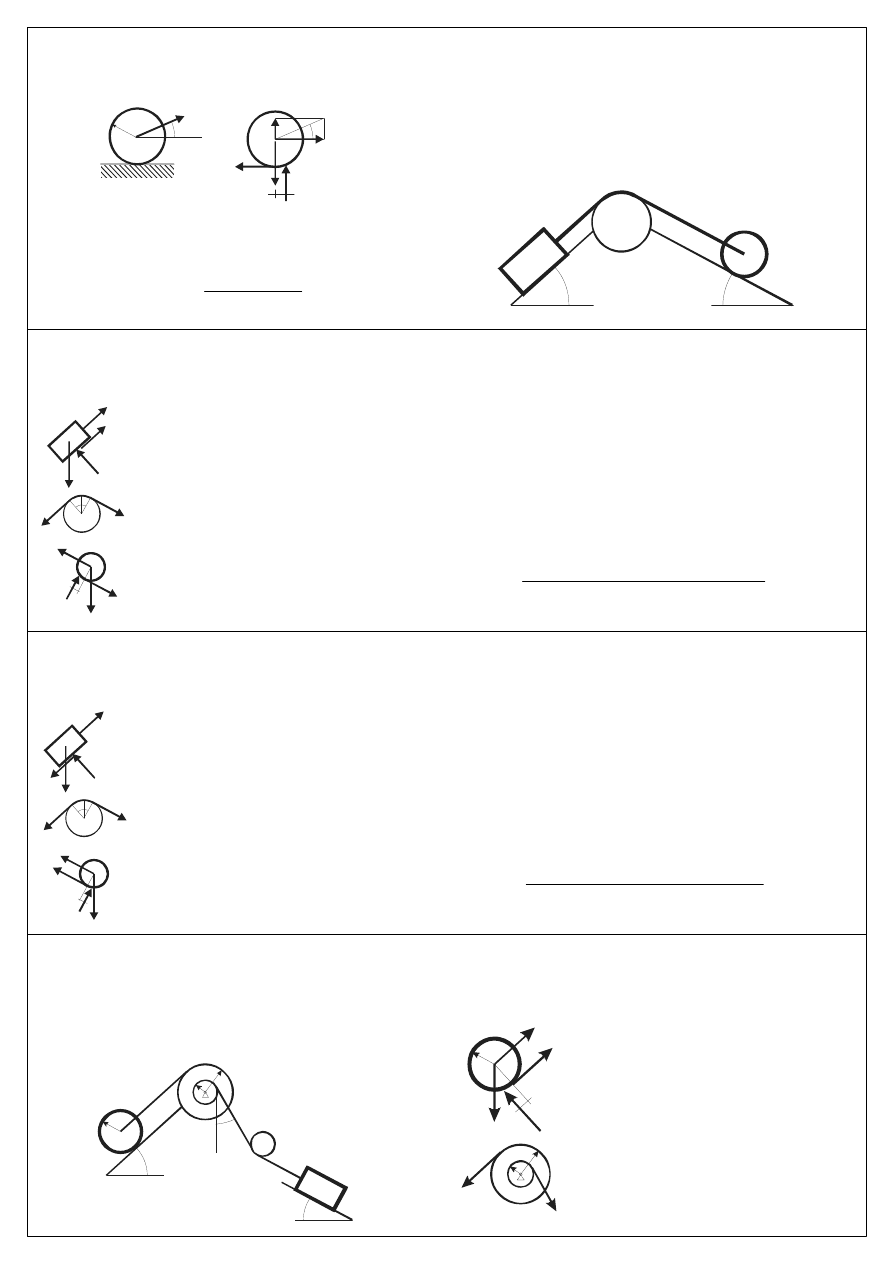
Tarcie cięgien
o bloczek nieruchomy
(1)
n
Zależność miedzy siłami w cięgnie
przy całkowicie rozwiniętym
tarciu:
gdzie S
1
jest siła działającą
w cięgnie w kierunku
ewentualnego ruchu.
1
2
S
S
e
µα
= ⋅
S
1
S
2
α
11
Tarcie cięgien
o bloczek nieruchomy
(2)
n
Zależność odwrotna:
n
Kąt
α nazywany jest kątem
opasania i musi być wyrażany w
radianach.
2
1
S
S e
µα
−
= ⋅
S
1
S
2
α
12
Tarcie cięgien – przykład
(1)
n
Obliczyć masę graniczną m
2
, po
przekroczeniu której rozpocznie się ruch.
Miara kąta
α
=30
o
.
α
m
1
m
2
µ
1
µ
2
µ
3
13
Tarcie cięgien – przykład
(2)
T
1
m g
1
N
1
S
1
X
Y
S
1
S
2
α
m
2
S
2
m g
2
N
2
T
2
X
Y
2
2
1
S
S e
µ α
= ⋅
1
1
0 :
0
X
S
T
=
− =
∑
1
1
0 :
0
Y
N
m g
=
− ⋅ =
∑
1
1
1
T
N
µ
= ⋅
2
2
2
0 :
sin
0
X
m g
S
T
α
=
− − =
∑
2
2
0 :
cos
0
Y
N
m g
α
=
−
=
∑
2
3
2
T
N
µ
=
⋅
I
II
III
14
Przykład – rozwiązanie
1
1
1
1
1
S
N
m g
µ
µ
= ⋅
= ⋅ ⋅
2
6
2
1
1
S
m g e
π
µ
µ
= ⋅ ⋅ ⋅
2
6
2
1
1
3
2
sin
cos
0
m g
m g e
m g
π
µ
α µ
µ
α
− ⋅ ⋅ ⋅
− ⋅
=
2
6
1
1
2
3
sin
cos
m g e
m
g
g
π
µ
µ
α µ
α
⋅ ⋅ ⋅
=
− ⋅
I
II
III
1
1
S
T
=
1
1
N
m g
=
⋅
1
1
1
T
N
µ
= ⋅
2
2
1
S
S e
µ α
= ⋅
2
3
2
T
N
µ
=
⋅
2
2
cos
N
m g
α
=
2
2
2
sin
0
m g
S
T
α
− − =
15
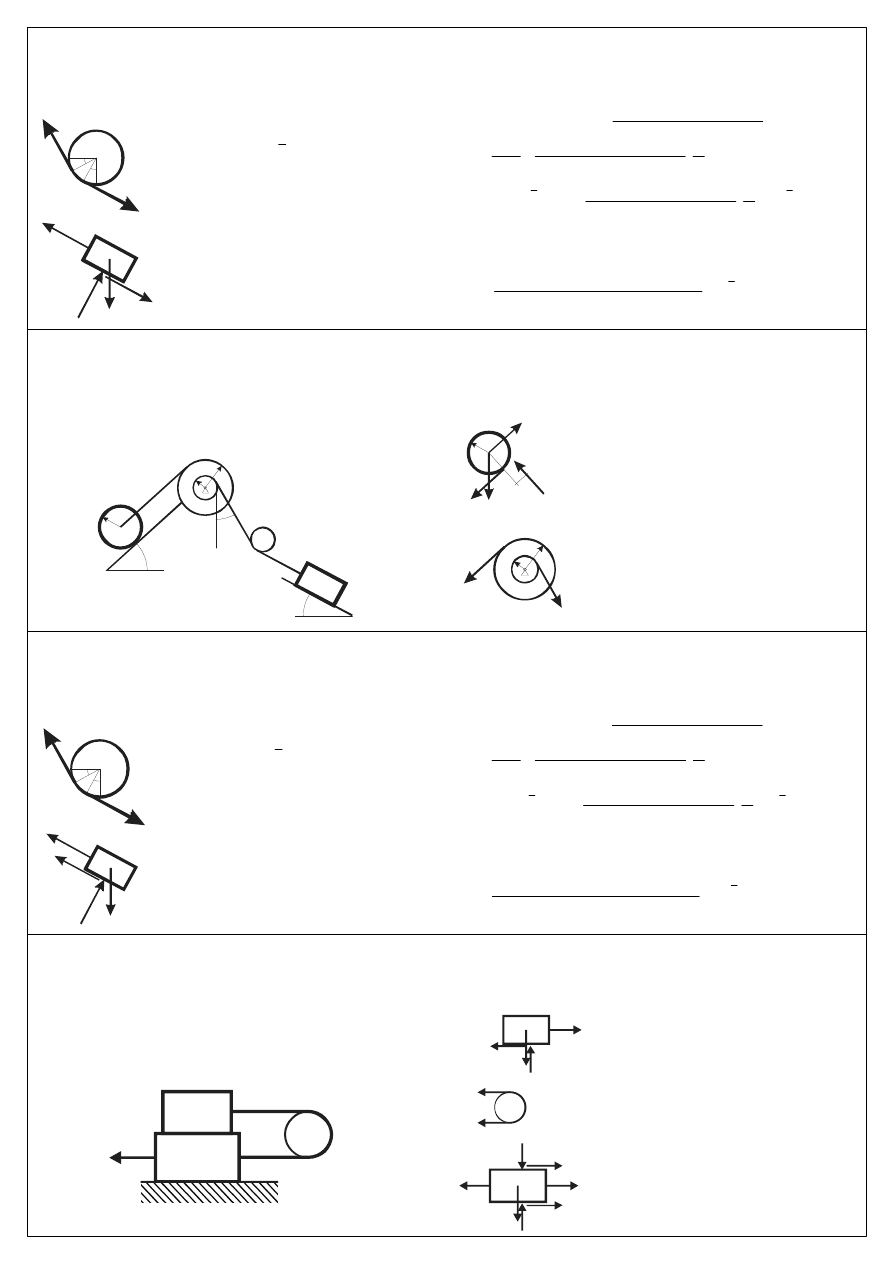
Opór przy toczeniu
n
W rzeczywistych układach, w
przypadku ciał o przekrojach okrągłych,
reakcja pionowa przesunięta jest w
kierunku ewentualnego ruchu.
n
Wynika to z nierównomiernego
rozkładu sił pod ciałem. Mimo założenia
kołowości przekroju, w rzeczywistości
styk nie jest punktowy.
16
Wartości współczynnika
oporu toczenia
Koło
Rodzaj podłoża
f [cm]
Drewno
Drewno
0,05-0,8
Drewno
Stal
0,03-0,04
Stal
Stal
0,001-0,005
Żeliwo
Żeliwo
0,005
17
Opór toczenia - przykład
α
m
α
mg
N
T
Pcos
α
Psin
α
P
f
f
A
r
0 :
sin
0
Y
P
N
m g
α
=
+ − ⋅ =
∑
0 :
cos
0
A
M
P
r
N f
α
=
⋅ − ⋅ =
∑
sin
N
m g
P
α
= ⋅ −
(
)
cos
sin
0
P
r
m g
P
f
α
α
⋅ −
⋅ −
⋅ =
cos
sin
m g f
P
r
f
α
α
⋅ ⋅
=
⋅
+
18
Przykład A
α
m
2
µ
2
m
1
µ
1
β
f
n
Określić zakres, w jakim ma mieścić się
wielkość masy m
2
, aby nie wystąpił ruch.
α
=30
o
,
β
=45
o
19
Przykład A – wariant I
(ruch w lewo)
S
1
m g
1
N
1
T
1
S
1
S
2
α β
(
)
2
2
1
S
S e
µ α β
−
+
= ⋅
1
1
1
0 :
sin
0
X
m g
S
T
α
=
⋅ ⋅
− − =
∑
1
1
0 :
cos
0
Y
N
m g
α
=
− ⋅ ⋅
=
∑
1
1
1
T
N
µ
= ⋅
2
2
2
0 :
sin
0
A
M
N
f
S
r
m g
r
α
=
⋅ − ⋅ +
⋅ =
∑
2
2
0 :
cos
0
Y
N
m g
β
=
−
=
∑
S
2
m g
2
f
N
2
T
2
A
20
Wariant I - rozwiązanie
1
1
1
1
sin
cos
S
m g
m g
α µ
α
=
⋅ ⋅
− ⋅ ⋅ ⋅
1
1
cos
N
m g
α
=
⋅ ⋅
1
1
1
cos
T
m g
µ
α
= ⋅ ⋅ ⋅
(
)
(
)
2
2
1
1
1
sin
cos
S
m g
m g
e
µ α β
α µ
α
−
+
=
⋅ ⋅
− ⋅ ⋅ ⋅
⋅
(
)
(
)
2
1
1
1
2 min
sin
cos
cos
sin
m g
m g
e
r
m
g
f
g
r
µ α β
α µ
α
β
α
−
+
⋅ ⋅
− ⋅ ⋅ ⋅
⋅
⋅
=
⋅ +
⋅
2
2
cos
N
m g
β
=
21
Przykład A – wariant II
(ruch w prawo)
S
1
m g
1
N
1
T
1
S
1
S
2
α β
S
2
m g
2
f
N
2
T
2
A
(
)
2
2
1
S
S e
µ α β
+
= ⋅
1
1
1
0 :
sin
0
X
m g
S
T
α
=
⋅ ⋅
− + =
∑
1
1
0 :
cos
0
Y
N
m g
α
=
− ⋅ ⋅
=
∑
1
1
1
T
N
µ
= ⋅
2
2
2
0 :
sin
0
A
M
N
f
S
r
m g
r
α
=
⋅ + ⋅ −
⋅ =
∑
2
2
0 :
cos
0
Y
N
m g
β
=
−
=
∑
22
Wariant II - rozwiązanie
1
1
1
1
sin
cos
S
m g
m g
α µ
α
=
⋅ ⋅
+ ⋅ ⋅ ⋅
1
1
cos
N
m g
α
=
⋅ ⋅
1
1
1
cos
T
m g
µ
α
= ⋅ ⋅ ⋅
(
)
(
)
2
2
1
1
1
sin
cos
S
m g
m g
e
µ α β
α µ
α
+
=
⋅ ⋅
+ ⋅ ⋅ ⋅
⋅
(
)
(
)
2
1
1
1
2 max
sin
cos
sin
cos
m g
m g
e
r
m
g
r
g
f
µ α β
α µ
α
α
β
+
⋅ ⋅
+ ⋅ ⋅ ⋅
⋅
⋅
=
⋅ −
⋅
2
2
cos
N
m g
β
=
23
Przykład B-I
(1)
n
Określić maksimum masy m
1
, przy którym nie
wystąpi jeszcze ruch.
α
m
2
m
1
µ
1
γ
f
µ
2
β
r
r
1
r
2
24
Przykład B-I
(2)
1
1
1
0 :
sin
0
A
M
N
f
S r
m g
r
α
=
⋅ + ⋅ −
⋅ =
∑
1
1
0 :
cos
0
Y
N
m g
α
=
−
=
∑
m
1
r
S
1
m
1
g
f
A
T
1
N
1
1
1
2
2
0 :
0
O
M
S r
S
r
=
⋅ − ⋅ =
∑
S
2
S
1
r
1
r
2
25
Przykład B-I
(3)
S
3
S
2
β
γ
(
)
1
2
3
2
S
S
e
π
µ
α β
−
− +
= ⋅
2
3
3
0 :
sin
0
X
m
g
S
T
γ
=
⋅ ⋅
− + =
∑
3
2
0 :
cos
0
Y
N
m
g
γ
=
−
⋅ ⋅
=
∑
3
2
3
T
N
µ
=
⋅
m
2
S
3
m
2
g
T
3
N
3
26
Przykład B-I - rozwiązanie
1
1
1
sin
cos
m g
r
m g
f
S
r
α
α
⋅ −
⋅
=
1
1
cos
N
m g
α
=
1
1
1
1
1
2
2
2
sin
cos
S r
m g
r
m g
f
r
S
r
r
r
α
α
⋅
⋅ −
⋅
=
=
⋅
(
)
(
)
1
1
2
2
1
1
1
3
2
2
sin
cos
m g
r
m g
f
r
S
S
e
e
r
r
π
π
µ
α β
µ
α β
α
α
−
− +
−
− +
⋅ −
⋅
=
⋅
=
⋅ ⋅
(
)
(
)
(
)
1
2
2
2
2
2
1
1
sin
cos
sin
cos
m
g
m
g
r r
m
e
g
r
g
f
r
π
µ
α β
γ µ
γ
α
α
− +
⋅ ⋅
+
⋅
⋅ ⋅
⋅ ⋅
=
⋅
⋅ −
⋅
⋅
3
2
cos
N
m
g
γ
=
⋅ ⋅
3
2
2
cos
T
m
g
µ
γ
=
⋅
⋅ ⋅
27
Przykład B-II
(1)
n
Określić minimum masy m
1
, przy którym nie
wystąpi jeszcze ruch.
α
m
2
m
1
µ
1
γ
f
µ
2
β
r
r
1
r
2
28
Przykład B-II
(2)
1
1
1
0 :
sin
0
A
M
N
f
S r
m g
r
α
=
⋅ − ⋅ +
⋅ =
∑
1
1
0 :
cos
0
Y
N
m g
α
=
−
=
∑
1
1
2
2
0 :
0
O
M
S r
S
r
=
⋅ − ⋅ =
∑
m
1
r
S
1
m
1
g
f
A
T
1
N
1
S
2
S
1
r
1
r
2
29
Przykład B-II
(3)
(
)
1
2
3
2
S
S
e
π
µ
α β
− +
= ⋅
S
3
S
2
β
γ
m
2
S
3
m
2
g
T
3
N
3
2
3
3
0 :
sin
0
X
m
g
S
T
γ
=
⋅ ⋅
− − =
∑
3
2
0 :
cos
0
Y
N
m
g
γ
=
−
⋅ ⋅
=
∑
3
2
3
T
N
µ
=
⋅
30
Przykład B-II - rozwiązanie
1
1
1
cos
sin
m g
f
m g
r
S
r
α
α
⋅ +
⋅
=
1
1
cos
N
m g
α
=
1
1
1
1
1
2
2
2
cos
sin
S r
m g
f
m g
r r
S
r
r
r
α
α
⋅
⋅ +
⋅
=
=
⋅
(
)
(
)
1
1
2
2
1
1
1
3
2
2
cos
sin
m g
f
m g
r r
S
S
e
e
r
r
π
π
µ
α β
µ
α β
α
α
− +
− +
⋅ +
⋅
=
⋅
=
⋅ ⋅
(
)
(
)
(
)
1
2
2
2
2
2
1
1
sin
cos
cos
sin
m
g
m
g
r r
m
e
g
f
g
r
r
π
µ
α β
γ µ
γ
α
α
−
− +
⋅ ⋅
−
⋅
⋅ ⋅
⋅ ⋅
=
⋅
⋅ +
⋅ ⋅
3
2
cos
N
m
g
γ
=
⋅ ⋅
3
2
2
cos
T
m
g
µ
γ
=
⋅
⋅ ⋅
31
Przykład C-I
(1)
n
Określić graniczną wartość siły, przy
przekroczeniu której może wystąpić
ruch.
m
1
µ
1
µ
3
m
2
µ
2
P
32
Przykład C-I
(2)
3
2
1
S
S e
µ π
= ⋅
1
1
0 :
0
X
S
T
=
− =
∑
1
1
0 :
0
Y
N
m g
=
− ⋅ =
∑
1
1
1
T
N
µ
= ⋅
T
1
m g
1
N
1
S
1
S
1
S
2
1
2
2
0 :
0
X
P T
T
S
=
− − −
=
∑
2
2
1
0 :
0
Y
N
m
g
N
=
−
⋅ −
=
∑
P
N
1
T
1
S
2
m g
2
N
2
T
2
2
2
2
T
N
µ
=
⋅
33
Przykład C-I - rozwiązanie
3
2
1
1
S
m g e
µ π
µ
= ⋅ ⋅ ⋅
1
1
1
S
m g
µ
= ⋅ ⋅
1
1
N
m g
=
⋅
1
1
1
T
m g
µ
= ⋅ ⋅
(
)
3
1
1
1
2
2
1
1
1
2
P
m g
m
g
m g
m g e
µ π
µ
µ
µ
= ⋅ ⋅ +
⋅
⋅ + ⋅
+ ⋅ ⋅ ⋅
2
2
1
N
m
g
m g
=
⋅ +
⋅
(
)
2
2
2
1
T
m
g
m g
µ
=
⋅
⋅ + ⋅
34
Przykład C-II
(1)
n
Określić graniczną wartość siły, przy
przekroczeniu której może wystąpić
ruch.
m
1
µ
1
µ
3
m
2
µ
2
P
35
Przykład C-II
(2)
T
1
m g
1
N
1
S
1
P
S
1
S
2
N
1
T
1
S
2
m g
2
N
2
T
2
3
2
1
S
S e
µ π
−
= ⋅
1
1
0 :
0
X
P
S
T
=
− − =
∑
1
1
0 :
0
Y
N
m g
=
− ⋅ =
∑
1
1
1
T
N
µ
= ⋅
2
1
2
0 :
0
X
S
T
T
=
− − =
∑
2
2
1
0 :
0
Y
N
m
g
N
=
−
⋅ −
=
∑
2
2
2
T
N
µ
=
⋅
36
Przykład C-II - rozwiązanie
(
)
(
)
3
1
1
1
2
2
1
S
m g
m
g
m g
e
µ π
µ
µ
=
⋅ ⋅ +
⋅
⋅ +
⋅
⋅
(
)
(
)
3
1
1
2
2
1
1
1
P
m g
m
g
m g
e
m g
µ π
µ
µ
µ
=
⋅ ⋅ +
⋅
⋅ +
⋅
⋅
+ ⋅ ⋅
1
1
N
m g
=
⋅
1
1
1
T
m g
µ
= ⋅ ⋅
(
)
2
1
1
2
2
1
S
m g
m
g
m g
µ
µ
= ⋅ ⋅ +
⋅
⋅ +
⋅
2
2
1
N
m
g
m g
=
⋅ +
⋅
(
)
2
2
2
1
T
m
g
m g
µ
=
⋅
⋅ + ⋅
Wyszukiwarka
Podobne podstrony:
1574 W13 Tarcie
wde w13
korozja i tarcie
W13 Pomiary częstotliwości i czasu ppt
TARCIE SMAROWANIE Bazylak
W13 ziemne odbiory i dokładność
4 Tarcie
nw asd w13
Tarcie, Materiały, Inżynieria Środowiska, Semestr 2, Mechanika techniczna, egzaminy
W13 Znieczulenia miejscowe, Medycyna Ratunkowa - Ratownictwo Medyczne
TARCIE, PW Transport, Gadżety i pomoce PW CD2, MECHANIKA, MECHANIKA !!, mechanika techniczna - labor
Tarcie
cw 6 tarcie suche
bioinformatyka w13 2008 9 web
03 Tarcie03 meryt
DSaA W13 String Matching
więcej podobnych podstron