Ć w i c z e n i e 37
BADANIE DRGAŃ TŁUMIONYCH CEWKI
GALWANOMETRU ZWIERCIADŁOWEGO
37.1. Opis teoretyczny
W ćwiczeniu testowany jest układ drgań, jakim jest cewka galwanometru zwierciadłowego. Opis
budowy takiego galwanometru przedstawiony jest w ćwiczeniu 16, a na rys. 37.1 przedstawione
zostały tylko podstawowe elementy potrzebne do zrozumienia powstawania drgań tłumionych.
a)
b)
wychylenie A
nić sprężysta
lusterko
0
rdzeń z żelaza 1 cewka
ekran
l
ϕ
2
ϕ
N
S
lusterko
nić
X wiązka światła
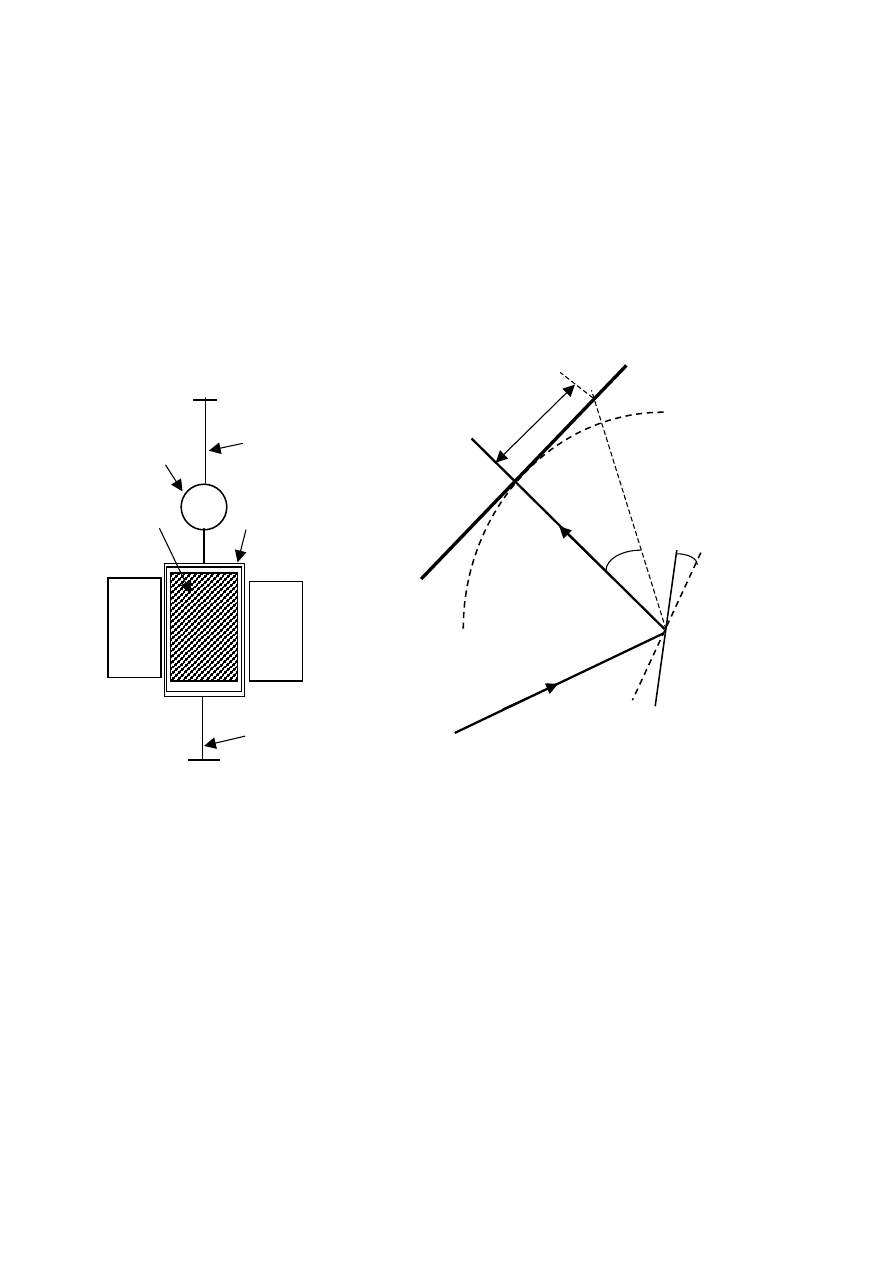
Rys. 37.1. Schemat galwanometru zwierciadłowego (a) i schemat do odczytu wychyleń
ramki galwanometru (b).
Cewka pomiarowa (1) o dużej liczbie zwojów z cienkiego drutu zawieszona jest na sprężystej nici
metalowej (2) i może wykonywać drgania skrętne w szczelinie wytworzonej między nabiegunni-
kami trwałego magnesu a rdzeniem wykonanym z magnetycznie miękkiego żelaza (3). Dzięki
rdzeniowi pole magnetyczne w szczelinie jest radialne i w przybliżeniu ma prawie wszędzie jedna-
kowe natężenie. Do nici przytwierdzone jest lusterko (4). Jeżeli skierujemy na nie wiązkę światła,
to na umocowanym naprzeciw ekranie (skali) można obserwować ruch plamki świetlnej. Zwiększa-
jąc odległość pomiędzy lusterkiem a zwierciadłem można dla małych skręceń sprężystej nici
otrzymać dostatecznie duże wychylenie plamki świetlnej na skali. Schemat działania układu odczy-
towego przedstawia rys. 37.1b. Zgodnie z prawem odbicia światła skręceniu lusterka o kąt
ϕ odpo-
wiada wychylenie plamki o 2
ϕ.
W czasie ruchu obrotowego na cewkę działa moment związany ze skręceniem nici sprężystej (cza-
sem sprężyny spiralnej), jest to tzw. moment siły kierującej. Przyjmując liniowy model zależności
wielkości tego momentu od kąta skręcenia (praktycznie realizowany przy dostatecznie małych ką-
tach) mamy:
M
K
= - D
K
ϕ (37.1)
gdzie D
K
oznacza współczynnik proporcjonalności zwany momentem kierującym, uwzględniający
właściwości sprężyste nici, na której zawieszona jest cewka.
Znak minus w zależności (37.1) uwzględnia fakt, że moment kierujący ma zwrot przeciwny do kąta
wychylenia cewki zależnego od wielkości prądu, który przez nią przepływa. Na przewody cewki
umieszczone w polu magnetycznym działa siła, której moduł jest równy
F = n I a B (37.2)
gdzie: n - liczba zwoi cewki, I - natężenie prądu, a - wysokość cewki, B - indukcja pola magnetycz-
nego.
Siła ta jest prostopadła do płaszczyzny ramki i ze względu na rdzeń, dzięki któremu pole magne-
tyczne jest radialne, niezależna od kąta
ϕ. Moment działający na cewkę, spowodowany przepływem
przez nią prądu, ma więc postać
B
S
I
n
2
b
F
2
M
=
=
(37.3)
gdzie: S = a b oznacza przekrój ramki, b – szerokość ramki.
Z równowagi momentu kierującego (37.1) i momentu skręcającego (37.3) wynika kąt wychylenia
cewki
K
D
B
S
n
I
=
ϕ
(37.4)
Tak więc pod wpływem przepływającego przez cewkę prądu I wychyli się ona o kąt
ϕ proporcjo-
nalny do wielkości tego prądu. Wzór ten opisuje zasadę działania galwanometru.
Jeżeli w pewnej chwili przerwiemy obwód zasilający cewkę galwanometru, zniknie moment
skręcający, a moment kierujący zgodnie z drugą zasadą dynamiki dla ciał w ruchu obrotowym, nada
cewce przyspieszenie
J
M
ε
K
r
r =
(37.5)
gdzie: J – moment bezwładności cewki względem osi obrotu,
2
2
dt
(t)
d
ε
ϕ
=
- przyspieszenie kątowe.
Korzystając z (37.1) otrzymujemy równanie opisujące drgania cewki:
0
(t)
ω
dt
(t)
d
2
0
2
2
=
+
ϕ
ϕ
(37.6)
gdzie
K
0
D
J
ω
=
- częstość kątowa.
Jest to równanie drgań harmonicznych. Jego rozwiązanie ma postać:
)
δ
t
ω
sin(
(t)
0
0
+
=
ϕ
ϕ
gdzie:
0
ϕ
- amplituda drgań,
δ - faza początkowa
W przypadku, gdy obwód cewki po odłączeniu go od źródła prądu zostanie zwarty przez oporność
R
Z
0, powstaje moment, który „tłumi” ruch cewki. Zgodnie z prawem indukcji Faradaya w cewce
poruszający się w polu magnetycznym pod wpływem M
≥
K
wyindukowuje się siła elektromotoryczna
ε równa:
dt
dΦ
ε
−
=
(37.7)
gdzie
Φ oznacza strumień pola magnetycznego przechodzący przez zwoje cewki.
Dla małej wartości wychylenia
ϕ mamy
Φ = n a b ϕ B
skąd
dt
d
B
S
n
dt
d
B
b
a
n
ε
ϕ
ϕ
−
=
−
=
(37.8)
Gdy obwód cewki jest zamknięty oporem R
Z
, popłynie w niej prąd, którego kierunek zgodnie z
regułą Lenza jest taki, że przeciwdziała zmianie strumienia, która go wywołała, czyli hamuje ruch
cewki
Z
g
Z
g
R
R
dt
d
B
S
n
R
R
ε
I
+
−
=
+
=
ϕ
(37.9)
przy tym R
g
jest opornością cewki.
Pod wpływem tego prądu powstaje moment hamujący (wzór 37.3):
dt
d
R
R
B)
S
(n
I
B
S
n
M
Z
g
2
H
ϕ
+
−
=
=
(37.10)
Moment ten jest więc proporcjonalny do
szybkości zmian kąta
ϕ,
a jego zwrot, jak już powiedziano,
jest przeciwny do kierunku ruchu cewki (moment M
H
przeciwdziała zmianom strumienia magne-
tycznego B, która wynika z ruchu cewki). Na cewkę działają teraz dwa momenty M
H
i M
K
Korzy-
stając z drugiej zasady dynamiki
J
M
M
ε
H
K
r
r
r
+
=
otrzymujemy
0
(t)
ω
dt
(t)
d
β
2
dt
(t)
d
2
0
2
2
=
+
+
ϕ
ϕ
ϕ
(37.11)
gdzie
)
R
J(R
2
B)
S
(n
β
Z
g
2
+
=
– współczynnik tłumienia drgań i nadal
K
0
D
J
ω
=
Równanie to jest znanym równaniem różniczkowym ruchu harmonicznego tłumionego. Analo-
giczną postać równania otrzymalibyśmy analizując ruch wahadła lub ciężarka zawieszonego na
sprężynie z tłumikiem. W obwodzie elektrycznym „drgającym” rolę elementu tłumiącego spełnia
oporność R
z
.
Wielkość
β w ćwiczeniu zależy od R
z
, przez którą zwieramy obwód cewki. W przypadku, gdy R
z
→ ∞, to β→ 0, co jest zgodne z tym co powiedzieliśmy o rozwartym obwodzie cewki galwanome-
tru. Częstość kątowa
ω
o
jest częstością drgań własnych, tj. częstością drgań tego samego układu,
gdy nie ma oporów ruchu.
Rozwiązanie równania (37.11) ma postać:
)
δ
t
ω
sin(
(t)
t
β
0
+
=
−
e
ϕ
ϕ
(37.12)
przy czym
2
2
0
β
ω
ω
−
=
Stałe
ϕ
o
,
δ mogą być określone z warunków początkowych. Wyrażenie ϕ
o
e
-
βt
spełnia rolę amplitu-
dy drgań, która w przeciwieństwie do ruchu harmonicznego prostego nietłumionego nie jest stałą w
czasie, lecz maleje wykładniczo, skąd zrozumiałe staje się nazwanie
β współczynnikiem tłumienia.
Ruch jaki wykonuje cewka zależy od tego, jak duży jest współczynnik tłumienia
β:
1. Jeżeli
β < ω
0
, czyli
mamy do czynienia z ruchem harmonicznym o malejącej
amplitudzie
ϕ
0
β
ω
ω
2
2
0
2
〉
−
=
o
e
-
βt
(rys. 37.2a) i okresie drgań
ω
π
2
T
=
(37.13)
Szybkość zmiany amplitudy często przedstawia się za pomocą tzw. logarytmicznego dekrementu
tłumienia. Określa się go z zależności
T
β
e
e
ln
ln
λ
)
T
t
(
β
0
t
β
0
1
n
n
=
=
=
+
−
−
+
ϕ
ϕ
ϕ
ϕ
(37.14)
Logarytmiczny dekrement tłumienia charakteryzuje tłumiony obwód drgający, jest stały w czasie i
określa, jak szybko zmienia się amplituda drgań po czasie równym okresowi drgań tłumionych.
a)
ϕ
10
5
t
-5
-10
ϕ
0
e
-
βt
-
ϕ
0
e
-
βt
ϕ
n
ϕ
n+1
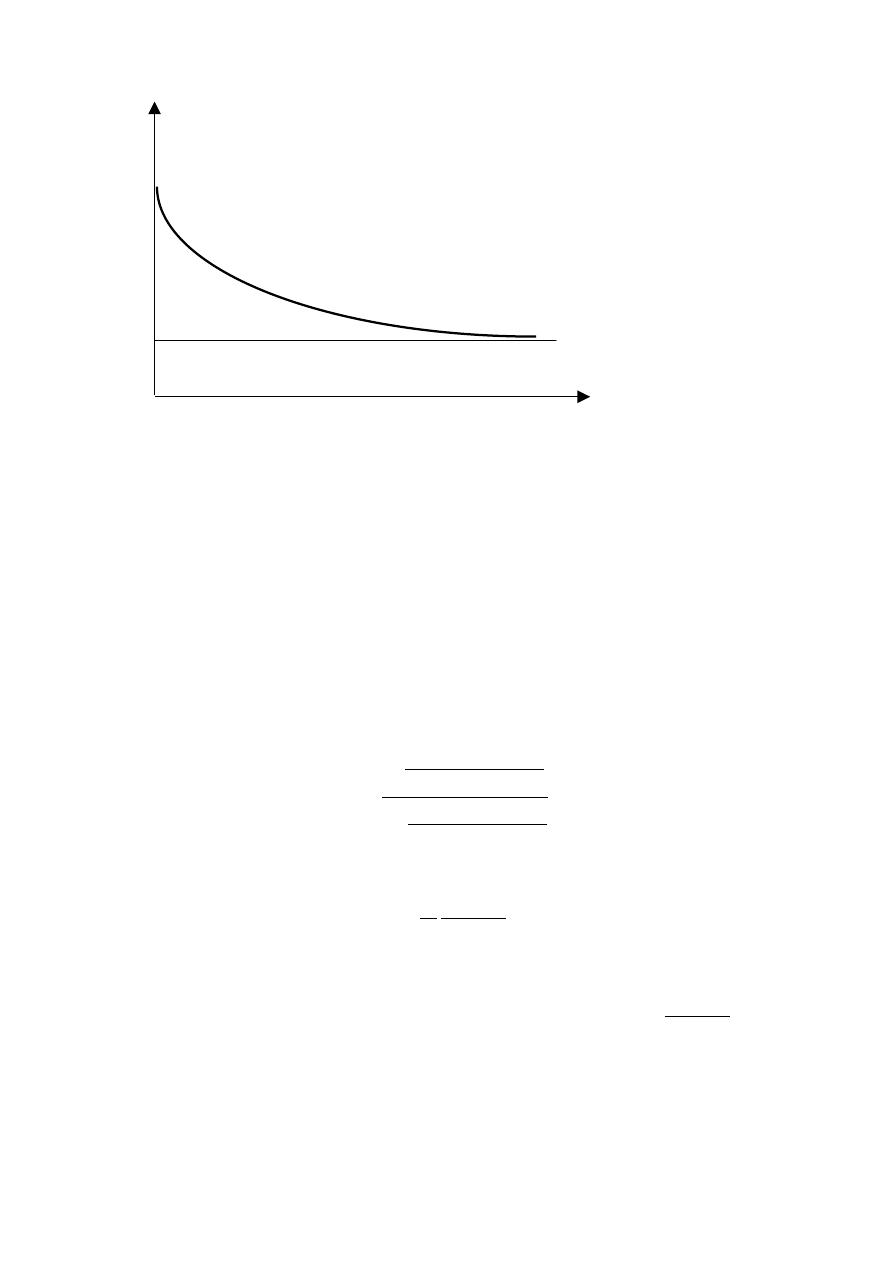
b)
ϕ
t
ϕ
0
0
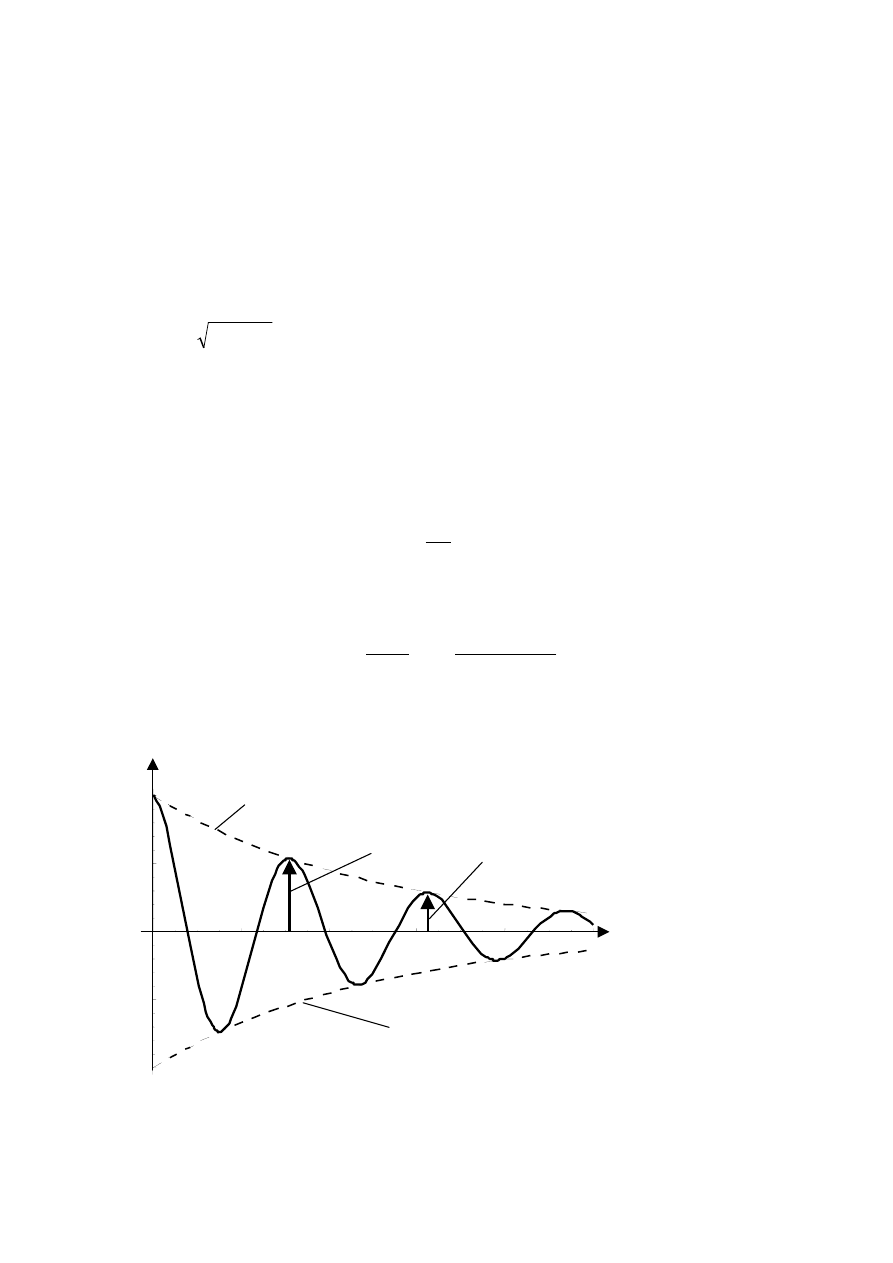
Rys.37.3. Wykresy drgań: a) drgania słabo tłumione, b) silnie tłumione powodujące brak drgań
2. Jeżeli siły oporu są na tyle duże, że , to ruch ma charakter aperiodyczny, tzn. ciało
wychylone z położenia równowagi wraca do tego położenia zbliżając się doń asymptotycznie, ale
nigdy go nie osiągając (rys. 37.2b).
0
β
ω
2
2
0
≤
−
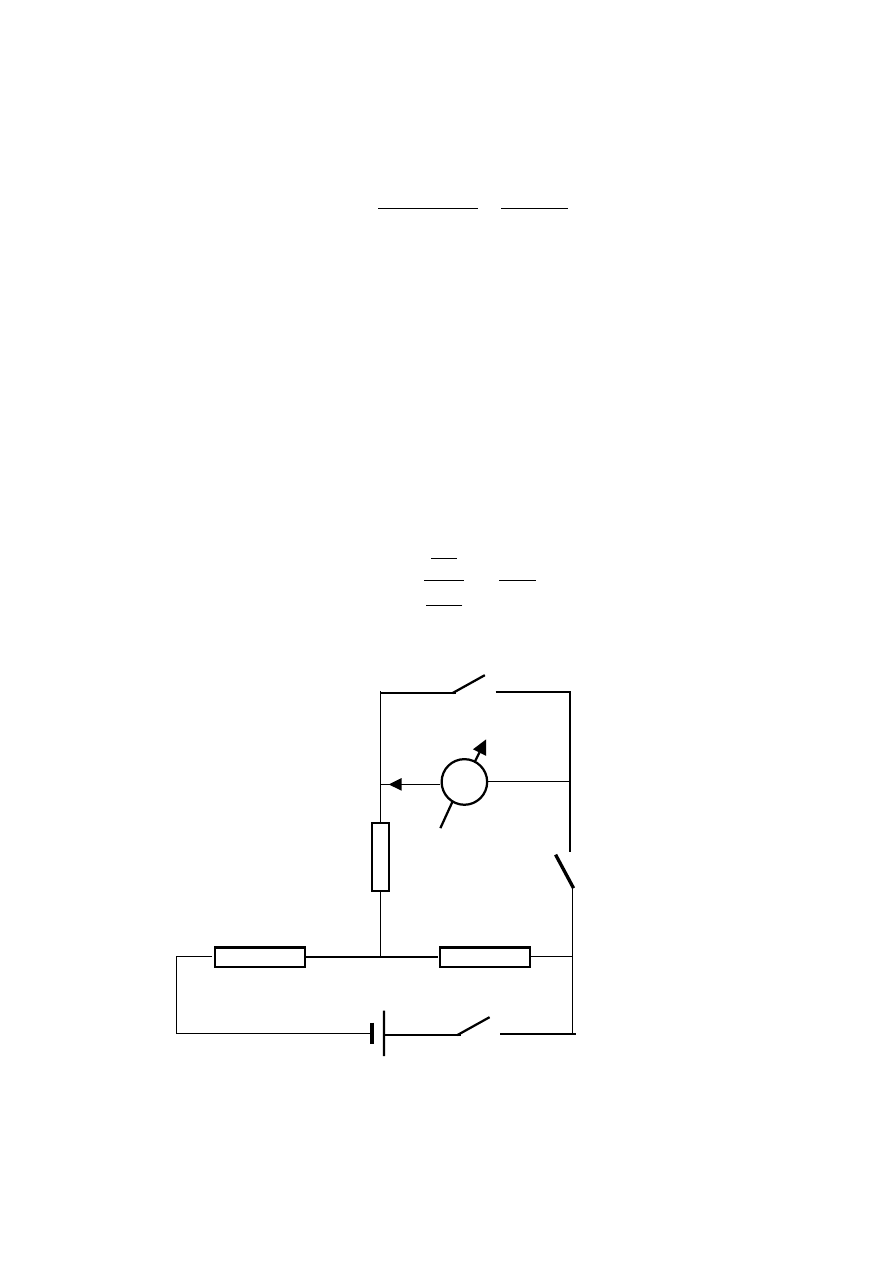
37.2. Opis układu pomiarowego
Układ pomiarowy składa się z galwanometru zwierciadłowego, zestawu oporników nastawnych
oraz źródła prądu. Schemat elektryczny układu przedstawia rys. 37.4.
Oporniki R
1
i R
n
stanowią dzielnik zmniejszający napięcie podawane do obwodu galwanometru.
Prąd I
g,
który przepłynie przez galwanometr przy zamkniętych kluczach K
1
i K
2
jest równy
)
R
R
(R
R
)
R
R
(
R
1
)
R
R
(R
R
R
U
I
n
g
1
g
n
n
g
1
n
g
+
+
+
+
+
+
=
Ponieważ R
n
1
Ω, R
≤
g
= kilkadziesiąt omów, R
≥ 1 kΩ to
n
1
n
g
R
R
R
R
U
I
+
≅
Wychylenie galwanometru przy zamkniętych kluczach K
1
i K
2
zależy od oporności R oraz różnicy
napięć między punktami A i B, regulowanej przez dzielnik napięcia (składnik
n
1
n
R
R
R
+
). Po roz-
warciu klucza K
1
pod wpływem momentu kierującego (M
K
) cewka galwanometru rozpocznie ruch
w kierunku położenia równowagi, ponieważ znajduje się ona w polu magnetycznym, popłynie
przez nią prąd indukcyjny. Jest on zależny od oporu R
z
(wzór 37.9), który w ćwiczeniu jest równy
R
z
= R + R
n
≈ R
Prąd płynie w takim kierunku, że przeciwdziała ruchowi ramki, wywołując moment hamujący
(M
H
).
Zgodnie z (37.11) współczynnik tłumienia jest równy
R
J
2
B)
S
(n
)
R
J(R
2
B)
S
(n
β
2
Z
g
2
=
+
=
(37.15)
Opornością R możemy więc regulować współczynnik tłumienia od bardzo dużej wartości, gdy R
jest małe (można dobrać tak R, aby
β = β
kr
), zwiększając R współczynnik tłumienia maleje i jest
równy zeru, gdy R =
∞ czyli otworzymy klucz K
2
. Mamy wówczas do czynienia z drganiami nie-
tłumionymi (zaniedbując oczywiście inne momenty hamujące, jak np. opór powietrza). Zauważmy
jeszcze, że takie wielkości, jak n, S, B, J są stałe w naszym układzie. Badając drgania tłumione
cewki galwanometru wygodniej jest posługiwać się wychyleniem plamki świetlnej na skali, niż
kątem skręcenia
ϕ. W przypadku dużej odległości l lusterka galwanometru od skali odczytowej,
jako amplitudę drgań możemy przyjąć odcinek A
n
równy
A
n
= l
ϕ
n
A
n
(
ϕ
n
) – kolejne amplitudy (kąty) drgań cewki.
1
n
n
1
n
n
A
A
ln
A
A
ln
λ
+
+
=
=
l
l
(37.16)
K
3
G
I
g
R
K
2
R
1
R
n
B
A
U
K
1
Rys. 37.3. Schemat elektryczny układu pomiarowego.
37.3. Przebieg pomiarów
1. Sprawdzić ustawienie położenia zerowego plamki galwanometru.
2. Ustawić na rezystorze dekadowym R maksymalną wartość rezystancji, tj. 100 k
Ω. Zamknąć
klucz K
2
, natomiast K
3
pozostawić otwarty. Ten ostatni służy do natychmiastowego zatrzyma-
nia ruchu plamki galwanometru w przypadku popłynięcia przez ramkę dużego prądu.
3. Za pomocą impulsowego zamykania klucza K
1
uzyskać wyraźne wychylenie plamki, np. 20-25
działek. Plamka galwanometru wykonuje wokół położenia zerowego ruch harmoniczny tłumio-
ny, o coraz mniejszej amplitudzie. Notować wartości kolejnych 4 amplitud przy wychyleniach
plamki w obie strony (łącznie z pierwszym).
4. Zmniejszać wartość rezystancji R kolejno dekadami najpierw co 20 k
Ω, potem co 1 kΩ, a na
końcu co 100
Ω, aż do wartości, przy której ruch plamki galwanometru stanie się ruchem ape-
riodycznym (np. 100; 80; 60; 40; 20; 10; 8; 6; 4; 3; 2; 1; 0,9; 0,8; 0,7; 0,6; itd. k
Ω)
i powtórzyć czynności opisane w pkt.2. Należy zwrócić uwagę, że przy mniejszych wartościach
R (szczególnie poniżej 10 k
Ω) należy delikatniej przyciskać klucz K
1
(szybciej puszczać).
5. Na zakończenie postępować podobnie jak w pkt.2 – spowodować wychylenie plamki galwano-
metru z położenia równowagi i otworzyć klucz K
2
(R =
∞). Wyznaczyć wartość jak największej
liczby kolejnych amplitud (przynajmniej siedmiu).
37.4. Opracowanie wyników pomiarów.
1. Dla każdej z nastawionych wartości R obliczyć z zależności (37.16) wartości
λ
N
logarytmiczne-
go dekrementu tłumienia dla każdej pary wychyleń plamki odległych o okres T (rys. 37.2), a na-
stępnie ich wartość średnią
λ .
2. Obliczyć średni błąd kwadratowy dla wartości średniej
λ
s
dla pomiaru z pkt.4 (R =
∞).
Oszacować błędy wartości
λ
N
dla R = 10 k
Ω, 1 kΩ i 0,5 kΩ.
3. Wykreślić zależność znalezionego logarytmicznego dekrementu tłumienia λ od wielkości rezy-
stancji R, uwzględniając błąd
λ
s
.
4. Wyciągnąć wnioski. Jak zmienia się błąd pomiaru ze zmniejszaniem wartość rezystancji R?
37.5. Pytania kontrolne
1. Podać zasadę działania galwanometru magnetoelektrycznego.
2. Omówić wzory na amplitudę i częstość drgań w ruchu harmonicznym tłumionym.
3. Co to jest logarytmiczny dekrement tłumienia i od czego zależy jego wartość?
4. Posługując się rys. 37.3 omówić wpływ rezystancji na prąd płynący przez galwanometr.
L i t e r a t u r a
[1] Frisz S., Timoriewa A.: Kurs fizyki, t.I. PWN, Warszawa 1964.
[2] Kittel C., Knight W.D., Ruderman M.A.: Mechanika PWN, Warszawa 1969.
[3] Szczeniowski S.: Fizyka doświadczalna, cz.I. Mechanika i akustyka. PWN, Warszawa 1972.
Wyszukiwarka
Podobne podstrony:
Badanie drgań tłumionych
Badanie drgań tłumionych wahadła sprężynowego, Budownictwo-studia, fizyka
Badanie drgań tłumionych RLC za pomocą oscyloskopu, Ćwiczenie nr 9
cw4 badanie drgan skretnych
Badanie wahadła skrętnego, Studia, Pracownie, I pracownia, 7 Badanie drgań wahadła skrętnego {torsyj
Ćw 65 Badanie drgań relaksacyjnych
Ćw 2 Badanie drgań pojazdu podczas jazdy
badanie drgan wahadla sprezynowego (2)
badanie drgan wahadla sprezynowego
Drgania mechaniczne, Badanie drgań własnych o jednym stopniu swobody, WSI Opole
Badanie drgań relaksacyjnych, Badanie drgań relaksacyjnych 2, WSTĘP TEORETYCZNY
Badanie drgań wymuszonych o dwóch stopniach swobody na przykładzie wymuszonych siłą harmoniczną drga
Badanie drgań wymuszonych o dwóch stopniach swobody na przykładzie wymuszonych siłą harmoniczną drga
Ćw 65-Badanie drgań relaksacyjnych
16 Wyznaczanie czułości galwanometru zwierciadłowego
Badanie pola elektromagnetycznego cewki cylindrycznej z przewodzącym rdzeniem, POLITECHNIKA LUBEL
Badanie drgan tumionych
więcej podobnych podstron