Elektrotechnika
Podstawy Automatyki 1
PODSTAWY AUTOMATYKI 1 – ĆWICZENIA
lista zadań nr 1
Transformata Laplace’a
1. Korzystając wprost z definicji znaleźć transformatę Laplace’a funkcji:
a.
3
2
)
(
t
t
y
c.
2
)
(
t
t
y
b.
2
)
(
t
t
y
d.
1
2
)
(
3
t
e
t
y
2. Dana jest odpowiedź na impuls Diraca (funkcja wagi)
)
(t
g
. Znaleźć transmitancję
operatorową
)
(s
G
.
a.
)
(
3
2
)
(
4
3
t
e
e
t
g
t
t
1
d.
)
(
3
2
)
(
3
2
2
t
e
te
e
t
t
g
t
t
t
1
b.
)
(
2
3
)
(
2
3
t
e
e
e
t
g
t
t
t
1
e.
)
(
2
sin
2
)
(
t
t
e
t
g
t
1
c.
)
(
3
2
)
(
2
2
t
e
e
t
t
g
t
t
1
f.
)
(
sin
)
(
t
t
t
t
g
1
3. Dana jest odpowiedź układu na skok jednostkowy
)
(
1
t
y
. Znaleźć transmitancję operatorową
)
(s
G
.
a.
)
(
4
2
2
)
(
2
1
t
e
e
t
y
t
t
1
c.
)
(
1
)
(
2
1
t
e
t
e
t
y
t
t
1
b.
)
(
2
)
(
2
1
t
te
t
y
t
1
d.
)
2
(
2
sin
)
(
1
t
t
t
y
1
4. Dana jest transmitancja operatorowa obiektu
)
(s
G
. Wyznaczyć odpowiedź układu na
impuls Diraca (funkcję wagi)
)
(t
g
.
a.
8
6
2
5
)
(
2
s
s
s
s
G
d.
2
2
1
)
(
s
s
s
G
b.
20
9
3
2
)
(
2
s
s
s
s
G
e.
6
5
3
1
)
(
2
2
s
s
s
s
s
s
G
c.
1
1
2
)
(
s
s
s
s
G
f.
3
1
3
2
)
(
s
s
s
G
5. Obiekt opisany jest równaniem różniczkowym. Wyznaczyć transmitancję operatorową
)
(s
G
oraz odpowiedź układu na impuls Diraca (funkcję wagi)
)
(t
g
.
a.
u
u
y
y
y
8
2
10
12
2
b.
u
u
y
y
y
4
8
16
12
2
c.
u
u
y
y
y
6
9
12
15
3
Elektrotechnika
Podstawy Automatyki 1
6. Obiekt opisany jest równaniem różniczkowym. Wyznaczyć transmitancję operatorową
)
(s
G
oraz odpowiedź układu na skok jednostkowy
)
(
1
t
y
.
a.
u
u
y
y
y
3
4
b.
u
u
y
y
y
6
2
6
5
c.
u
u
u
y
y
y
4
5
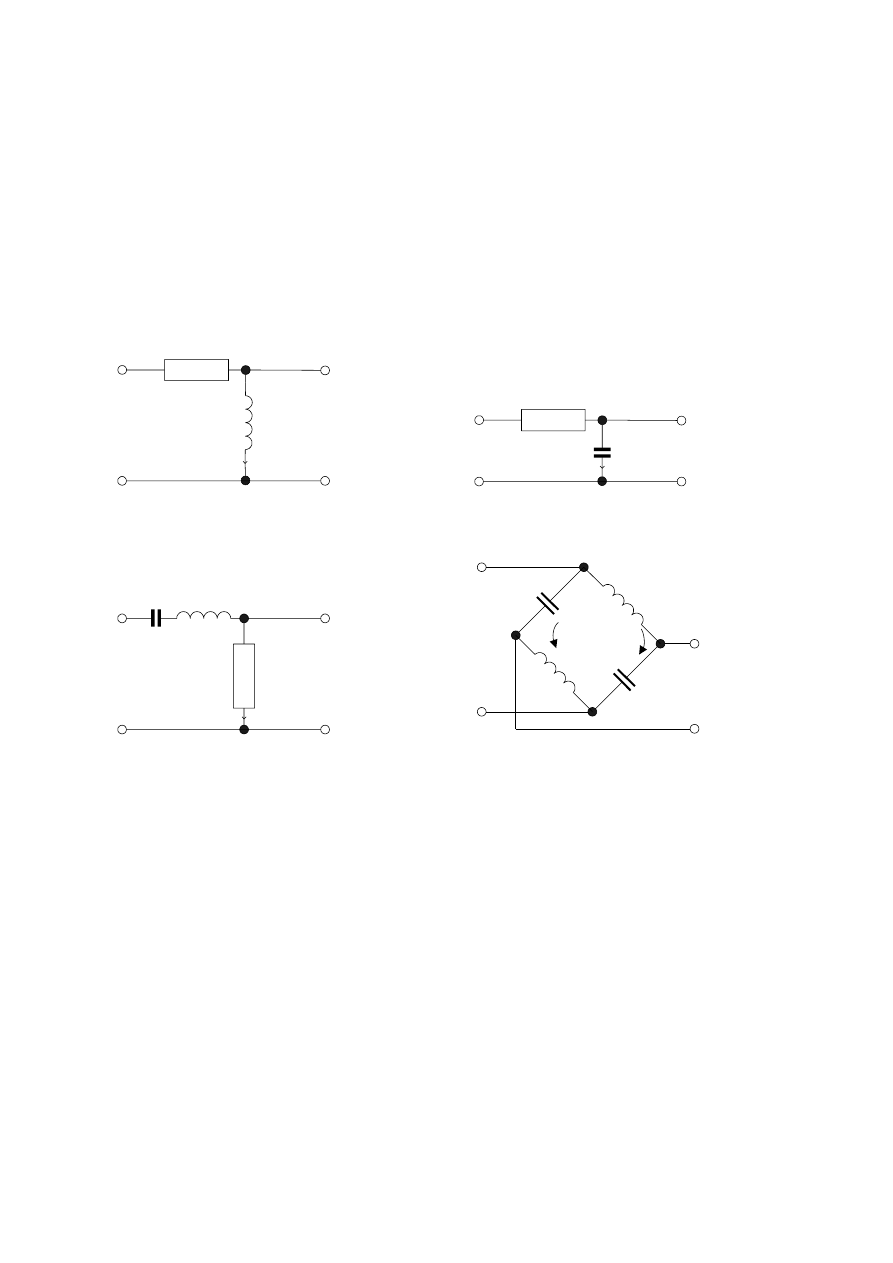
7. Znaleźć transmitancję
)
(s
G
czwórnika elektrycznego:
a.
b.
U
1
U
2
i
L
R
C
U
1
U
2
i
R
c.
d.
U
1
U
2
i
L
R
C
U
1
U
2
i
1
C
L
L
C
i
2
Elektrotechnika
Podstawy Automatyki 1
PODSTAWY AUTOMATYKI 1 – ĆWICZENIA
lista zadań nr 2
Charakterystyki czasowe i częstotliwościowe układów ciągłych
1. Wykreślić charakterystykę impulsową obiektów opisanych transmitancją operatorową
)
(s
G
:
a.
5
)
(
s
G
c.
s
s
G
2
)
(
b.
2
1
)
(
s
s
G
d.
1
2
5
)
(
s
s
s
G
2. Wykreślić charakterystykę odpowiedzi na skok jednostkowy obiektów opisanych
transmitancją operatorową identyczną jak w zadaniu I.
3. Wykreślić charakterystykę amplitudowo – fazową (Nyquista) obiektów opisanych
transmitancją operatorową identyczną jak w zadaniu I.
4. Wykreślić logarytmiczną charakterystykę amplitudowo – fazową (na karcie Nicholsa)
obiektów opisanych transmitancją operatorową identyczną jak w zadaniu I.
5. Wykreślić uproszczone logarytmiczne charakterystyki modułu i argumentu (Bodego)
obiektów opisanych transmitancją operatorową
)
(s
G
:
a.
2
1
10
)
(
s
s
s
G
f.
10
100
)
(
s
s
s
G
b.
2
10
1
)
(
s
s
G
g.
1
,
0
1
)
(
s
s
s
s
G
c.
2
1
1
,
0
1
)
(
s
s
s
G
h.
1
100
1
10
01
,
0
)
(
s
s
s
s
G
d.
2
1
)
(
s
s
s
G
i.
2
1
1
,
0
1
,
0
1
100
10
)
(
s
s
s
s
G
e.
10
1
10
)
(
s
s
s
s
G
j.
1
100
1
,
0
1
,
0
1
10
10
)
(
s
s
s
s
G
Elektrotechnika
Podstawy Automatyki 1
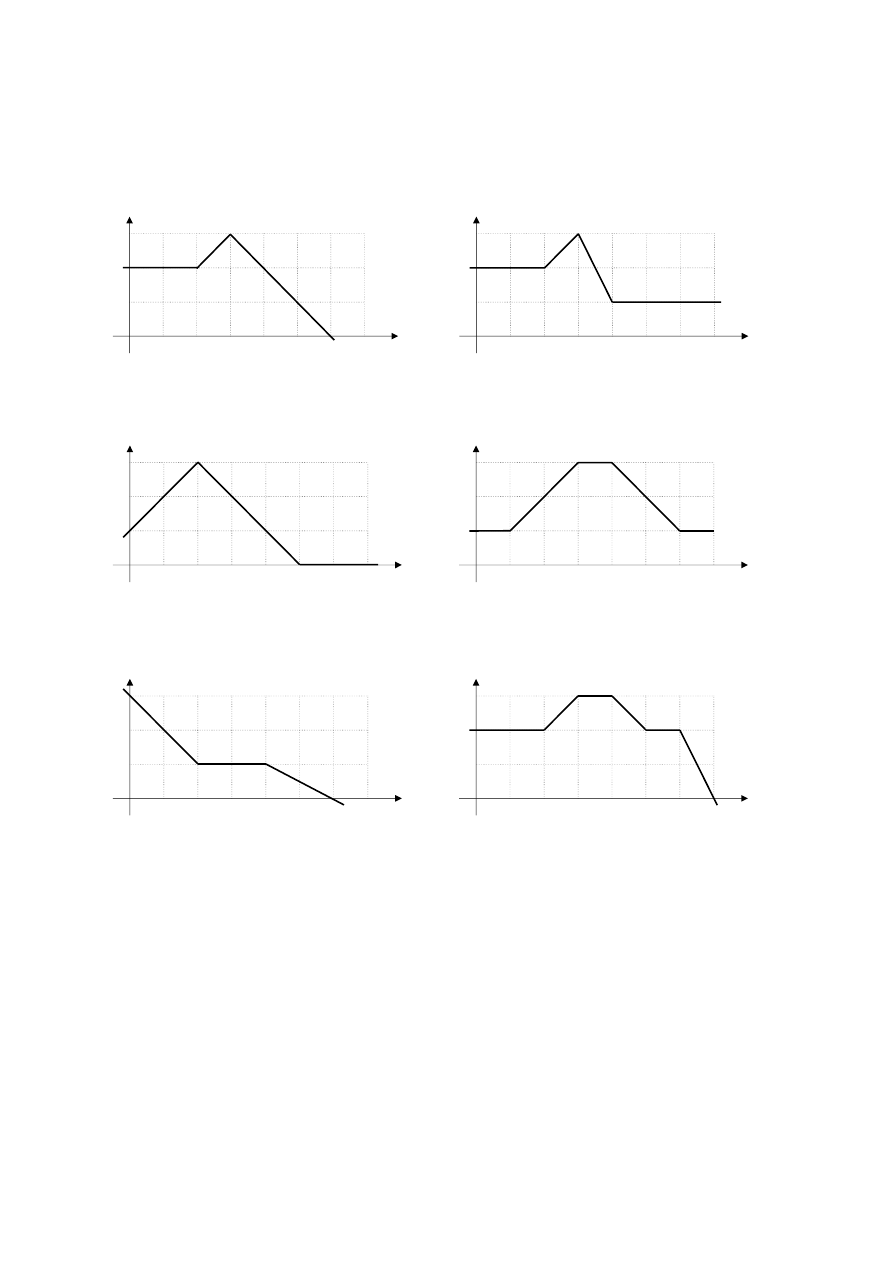
6. Wyznaczyć transmitancję operatorową
)
(s
G
dla układów, których uproszczone
logarytmiczne charakterystyki modułu dane są na rysunkach:
a.
b.
L(
) [dB]
[rad/s]
10
-3
10
-2
10
-1
10
0
10
1
10
2
10
3
20
40
60
L(
) [dB]
[rad/s]
10
-3
10
-2
10
-1
10
0
10
1
10
2
10
3
20
40
60
c.
d.
L(
) [dB]
[rad/s]
20
40
60
10
4
10
-2
10
-1
10
0
10
1
10
2
10
3
...
L(
) [dB]
[rad/s]
10
-3
10
-2
10
-1
10
0
10
1
10
2
10
3
20
40
60
e.
f.
L(
) [dB]
[rad/s]
20
40
60
10
4
10
-2
10
-1
10
0
10
1
10
2
10
3
L(
) [dB]
[rad/s]
10
-3
10
-2
10
-1
10
0
10
1
10
2
10
3
20
40
60
Elektrotechnika
Podstawy Automatyki 1
PODSTAWY AUTOMATYKI 1 – ĆWICZENIA
lista zadań nr 3
Algebra schematów blokowych układów ciągłych. Uchyby ustalone
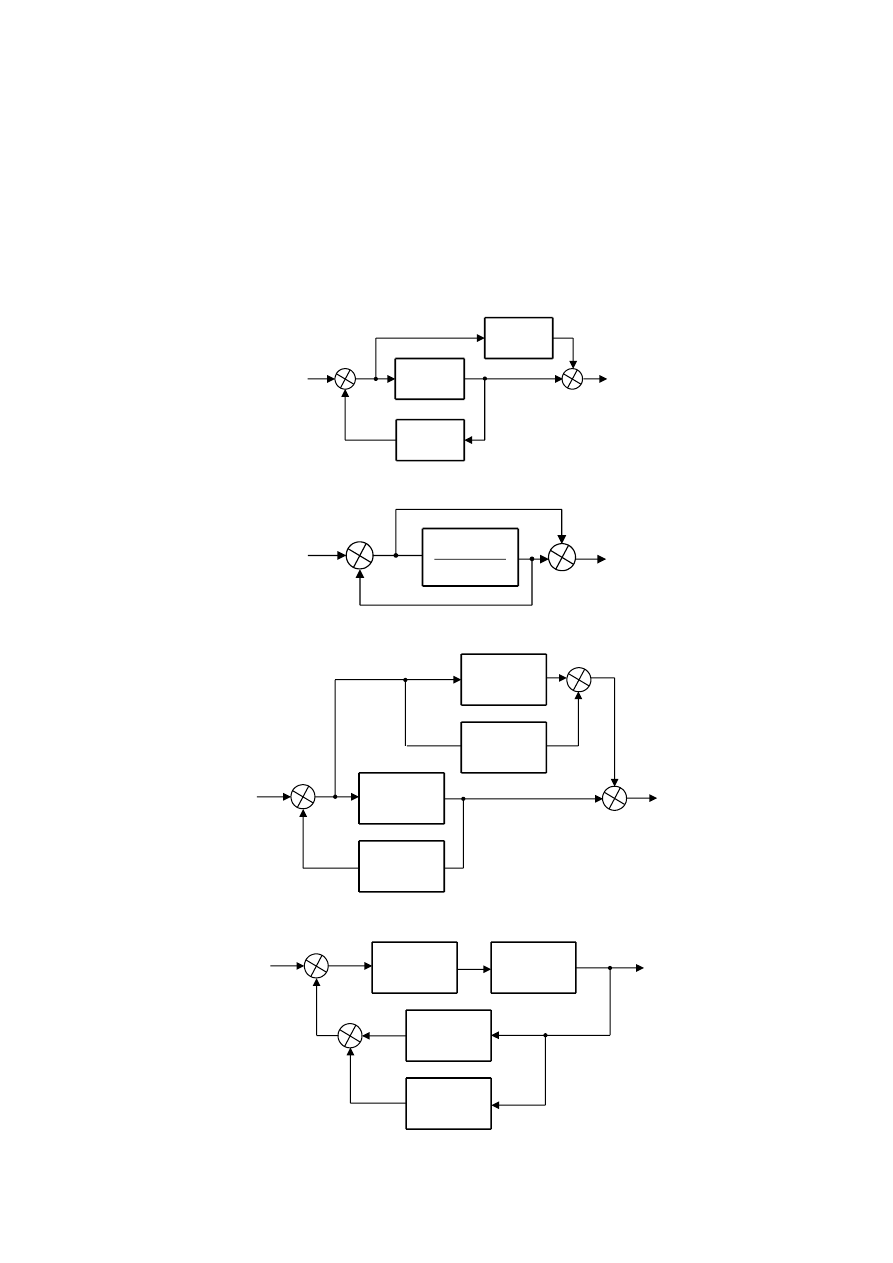
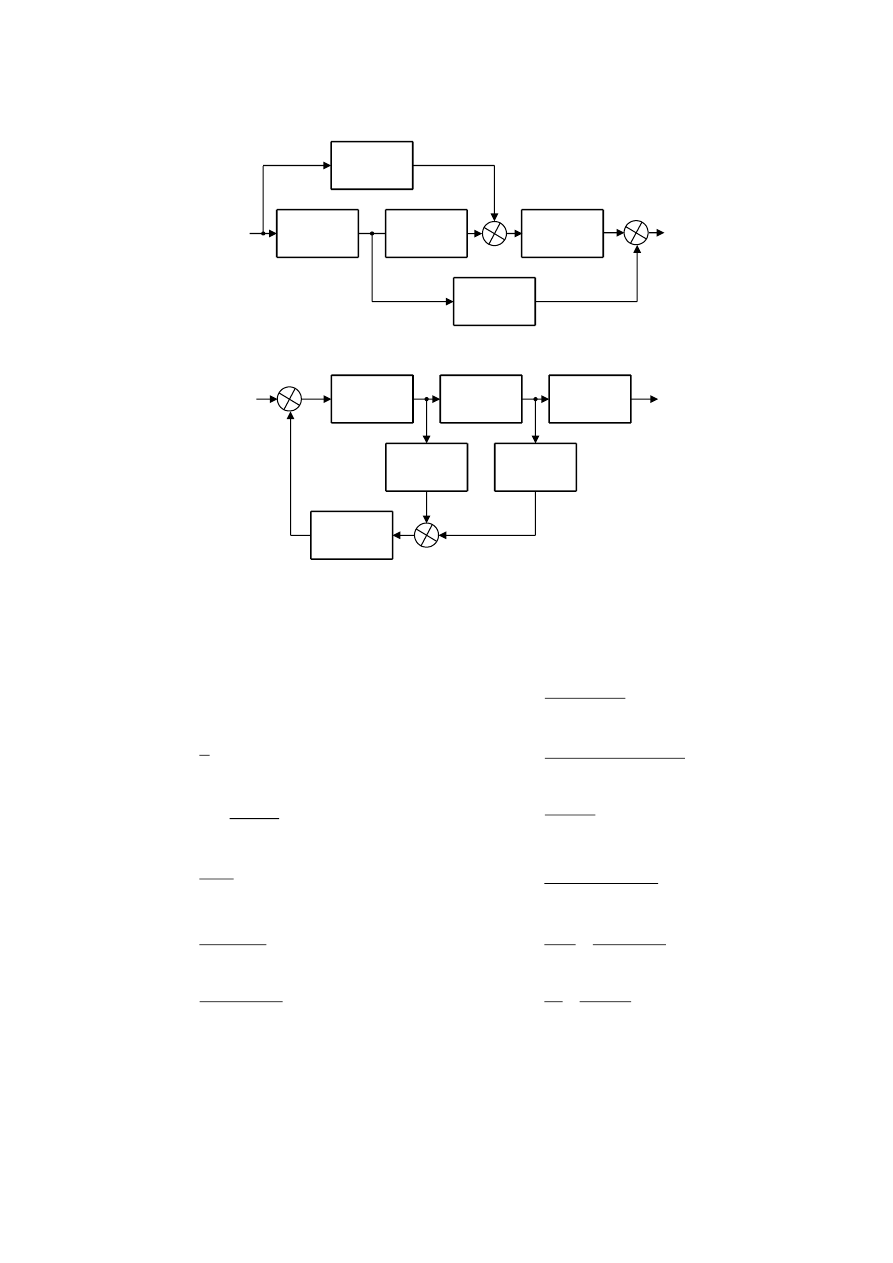
1. Wyznaczyć transmitancję zastępczą układów jak na rysunkach:
a.
G
1
–
G
2
G
3
b.
1
12
2
5
s
s
se
s
–
c.
G
2
–
G
4
G
1
G
3
d.
G
1
–
G
3
G
2
G
4
Elektrotechnika
Podstawy Automatyki 1
e.
G
1
G
2
G
3
G
5
G
4
f.
–
G
1
G
2
G
3
G
5
G
4
G
6
2. Dana jest transmitancja układu otwartego
)
(
12
s
G
. Obliczyć wartość uchybów położenia,
prędkości i przyspieszenia:
a.
4
)
(
12
s
G
g.
2
3
2
12
2
5
,
0
)
(
s
s
s
s
s
G
b.
s
s
G
5
)
(
12
h.
3
4
2
4
12
2
5
,
0
2
3
4
)
(
s
s
s
s
s
s
G
c.
2
12
5
)
(
s
s
s
G
i.
3
12
1
4
)
(
s
s
G
d.
5
5
)
(
12
s
s
G
j.
s
s
s
s
s
s
G
2
2
2
12
2
1
,
0
)
(
e.
3
2
)
(
2
12
s
s
s
G
k.
1
2
1
1
2
)
(
2
12
s
s
s
s
G
f.
s
s
s
s
G
3
2
)
(
2
3
12
l.
s
s
s
s
G
2
1
2
)
(
2
2
12
Elektrotechnika
Podstawy Automatyki 1
PODSTAWY AUTOMATYKI 1 – ĆWICZENIA
lista zadań nr 4
Stabilność układów ciągłych cz.1
1. Korzystając z kryterium Routh’a zbadać stabilność układu o wypadkowej transmitancji
)
(s
G
. Określić liczbę biegunów w prawej i w lewej półpłaszczyźnie.
a.
1
2
3
4
5
1
10
)
(
2
3
4
s
s
s
s
s
s
G
d.
1
2
3
)
(
2
3
s
s
s
s
s
G
b.
1
2
3
4
1
)
(
2
3
4
s
s
s
s
s
G
e.
4
3
2
5
)
(
2
3
s
s
s
s
G
c.
6
5
5
5
1
3
)
(
2
3
4
s
s
s
s
s
s
G
f.
1
5
10
)
(
2
3
s
s
s
s
s
G
2. Dana jest transmitancja
)
(s
G
obiektu. Wykorzystując kryterium Michajłowa zbadać czy
układ zamknięty (ze sztywnym sprzężeniem zwrotnym) jest stabilny.
a.
1
2
)
(
2
3
s
s
s
s
G
c.
1
3
2
3
1
)
(
2
3
s
s
s
s
G
b.
1
3
2
1
)
(
2
3
s
s
s
s
G
d.
1
)
(
2
s
s
e
s
G
s
3. Dana jest transmitancja
)
(
12
s
G
układu otwartego. Wykorzystując kryterium Nyquista
zbadać czy układ zamknięty jest stabilny.
a.
1
5
,
1
1
4
)
(
2
12
s
s
s
s
G
c.
s
s
s
G
3
12
1
)
(
b.
1
1
2
1
)
(
2
12
s
s
s
s
G
d.
6
5
5
)
(
2
12
s
s
s
s
G
4. Dana jest transmitancja
)
(
12
s
G
układu otwartego. Wykorzystując kryterium Nyquista
zbadać dla jakiego k układ zamknięty jest stabilny.
a.
3
12
4
)
(
s
k
s
G
c.
6
4
2
2
)
(
12
s
s
s
k
s
G
b.
3
1
)
(
2
12
s
s
k
s
G
d.
1
12
7
35
)
(
2
12
s
s
s
k
s
G
Elektrotechnika
Podstawy Automatyki 1
PODSTAWY AUTOMATYKI 1 – ĆWICZENIA
lista zadań nr 5
Stabilność układów ciągłych cz.2
1. Dana jest transmitancja
)
(
12
s
G
układu otwartego. Wykorzystując kryterium logarytmiczne
zbadać czy układ zamknięty jest stabilny.
a.
3
12
1
7
)
(
s
s
G
b.
2
4
4
50
)
(
2
12
s
s
s
s
G
c.
s
e
s
s
G
5
12
2
3
)
(
2. Dana jest transmitancja
)
(
12
s
G
układu otwartego. Obliczyć zapas fazy i wzmocnienia dla
układu zamkniętego.
a.
3
12
1
4
)
(
s
s
G
c.
4
16
8
32
)
(
2
12
s
s
s
s
G
b.
s
e
s
s
G
2
12
5
,
0
1
)
(
d.
12
10
2
3
)
(
2
12
s
s
s
G
Wyszukiwarka
Podobne podstrony:
PA1 lista zadan ETK odp student
PA2 lista zadan ETK
Fizyka lista zadan 1 id 176924 Nieznany
Lista zadań 5 6
Lista zadan 9
4 lista zadan
IV lista zadan z Fizyki Transport, 1 Studia PWR (Transport 1 Rok 1 Semestr), Fizyka PWR dr.Henryk Ka
Funkcje zespolone lista zadań
lista zadan geometria
Lista zadan 6
UP Wrocław lista zadan, Technologia Informacyjna semestr 1 oraz Informatyka i komputerowe wspomagan
LISTA ZADAN 4
1. LISTA ZADAŃ STATYSTYKA WSB, statystyka
Cw 3 wykresy symboliczne i wektorowe lista zadan
Lista zadań 2
lista zadan makro
więcej podobnych podstron