1
g
1. Sposoby taktowania rdzeni i układów peryferyjnych mikrokontrolerów rodziny Cortex-
Mx.
Rdzen taktowany jest poprzez uklady zegarowe zalezne od danego producenta. Uklady peryferyjne moga
miec swoje oddzielne zegary, z dodatkowymi dzielnikami.
Generalnie pytanie jest malo precyzyjne i powinno dotyczyc raczej konkretnego mikrokontrolera, gdyz
sam rdzen cortex m nie posiada ukladow zegarowych, a jedyne peryferia wbudowane w ten rdzen to
SysTick i kontrolerprzerwan NVIC.
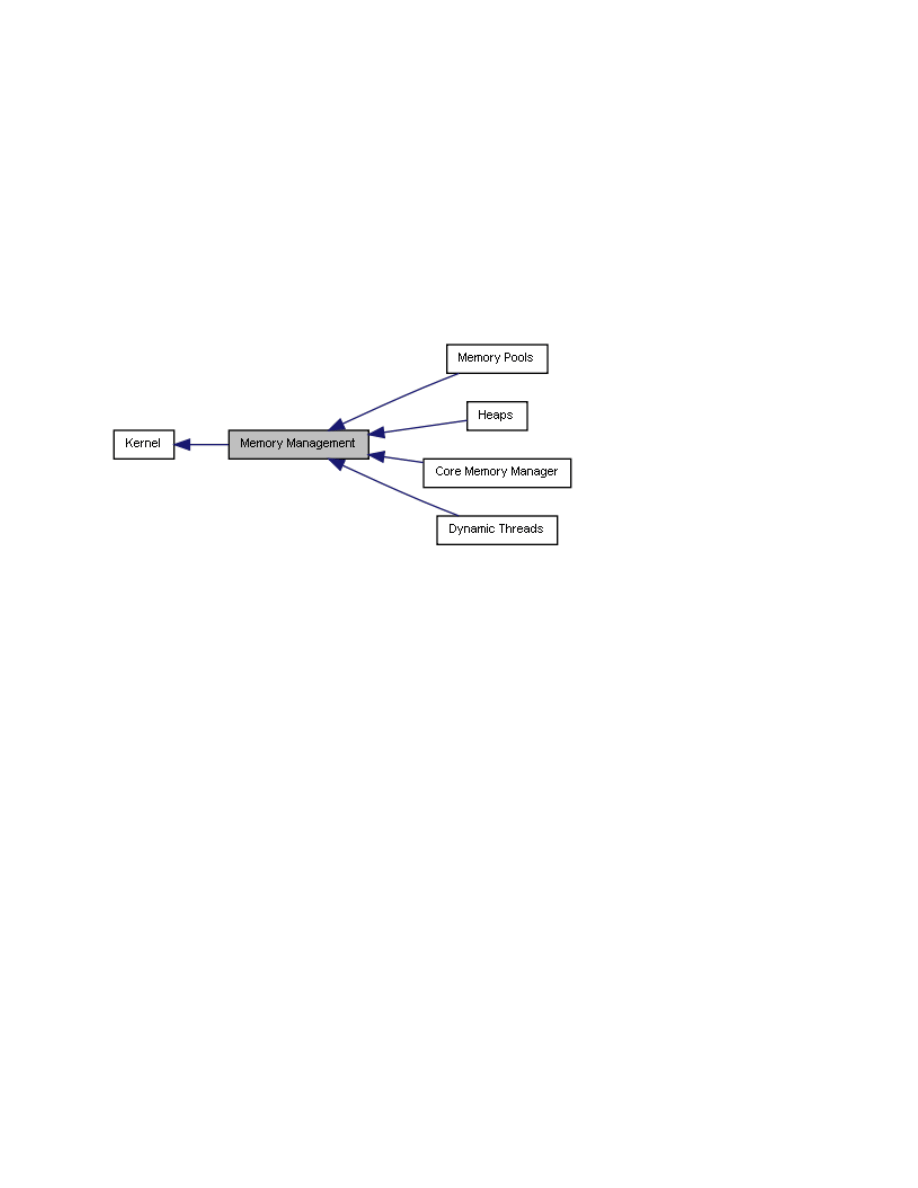
2. Mechanizmy alokacji i
dostępu do zmiennych w mikrokontrolerach rodziny Cortex-Mx.
The core memory manager is a simplified allocator that only allows to allocate memory blocks
without the possibility to free them.
This allocator is meant as a memory blocks provider for the other allocators such as:
● C-Runtime allocator (through a compiler specific adapter module).
By having a centralized memory provider the various allocators can coexist and share the main
memory.
This allocator, alone, is also useful for very simple applications that just require a simple way to get
memory blocks.
The heap allocator implements a first-fit strategy and its APIs are functionally equivalent to the usual
malloc() and free() library functions. The main difference is that the OS heap APIs are guaranteed to
be thread safe.
By enabling the CH_USE_MALLOC_HEAP option the heap manager will use the runtime-provided
malloc() and free() as back end for the heap APIs instead of the system provided allocator.
The Memory Pools APIs allow to allocate/free fixed size objects in constant time and reliably without
memory fragmentation problems.
Memory Pools do not enforce any alignment constraint on the contained object however the objects
must be properly aligned to contain a pointer to void.
3. Dostęp do struktur bitowych (Bit-Banding), zasady adresowania, wady i zalety.
Bit-
band, czyli obszary o dostępie atomowym
Podtytuł z pewnością wymaga wyjaśnienia: co to bowiem znaczy „obszar o dostępie atomowym”? Kiedyś
uważano, że atom jest najmniejszą, niepodzielną cząstką materii. Rozwój nauki wykazał błędność tego

2
założenia, ale w celu wytłumaczenia określenia dostęp atomowy, trzymajmy się starszej wersji poglądu
na temat budowy materii.
Analogią do atomu w systemach cyfrowych jest bit. Po tym porównaniu łatwo już zrozumieć istotę
obszarów o dostępie atomowym. Są to obszary pamięci, gdzie jest możliwy dostęp do pojedynczych
bitów, a nie jak to jest zazwyczaj do całych bajtów.
W przestrzeni adresowej rdzenia Cortex M3 znajdują się dwa obszary bit-band. Pierwszy w regionie
pamięci RAM, a drugi w regionie urządzeń peryferyjnych.Dla pamięci RAM obszar, w którym jest możliwy
dostęp atomowy rozpoczyna się od adresu 0x20000000, natomiast dla urządzeń peryferyjnych jest to
adres 0x40000000. Pomysł obszarów bit-band jest efektem dążenia do maksymalnej optymalizacji pracy
rdzenia. Często zdarza się, że aplikacja musi zmienić stan tylko jednego bitu w danym miejscu w pamięci.
Standardowo odbywa się to za pomocą trzech elementarnych operacji:
– odczytu komórki pamięci do rejestru,
– ustawienia interesującego bitu,
– przepisania zmodyfikowanej wartości z rejestru do komórki pamięci.
<-
wyjęte z kontekstu i w tym
przypadku błędne bo bit-banding właśnie tak nie działa, pozdrawiam
TO MOŻE NAPISZ JAK DZIAŁA <- lubie to
-
po prostu wpisuje pojedynczy bit, bez odczytu i operacji logicznych, tak jak to jest napisane powyżej ;D w
całym kontekście te 3 punkty dotyczyły zamiany bitu BEZ bit-bandingu
Podoba mi się to tłumaczenie, łopatologiczne
Zazwyczaj pamięć w systemach cyfrowych jest podzielona na komórki o pojemności
8 bitów. Każda z komórek ma określony adres, dzięki któremu można jednoznacznie
określić, do której z nich chcemy się odwołać. Taka organizacja nie pozwala jednak
uzyskać dostępu bezpośrednio do pojedynczych bitów słowa danych. By móc
zmodyfikować wartość pojedynczego bitu, należy odczytać zawartość całej komórki
pamięci, zmienić wartość interesującego nas bitu i ponownie zapisać w pamięci całe
słowo. Rozwiązaniem ułatwiającym operowanie na pojedynczych bitach są obszary
bit-
band, w których każdy bit ma swój własny adres. Jest to szczególnie ważne
i przydatne w systemach zbudowanych z wykorzystaniem mikrokontrolerów, gdyż
tego typu operacje są tam bardzo częste. Oprócz dostępu bitowego, do obszarów bit-
-band
można się oczywiście odwołać także według normalnych zasad adresowania.
Wyjaśnienia wymaga jeszcze sposób adresowania bitów w obszarze o dostępie atomowym.
W tym celu stosuje się następujący wzór:
adres_bitu = poczatek_obszaru_bitband + przesuniecie_bajtu×32 + numer_bitu× 4,
1.3. Architektura rdzenia ARM Cortex-M3 19
gdzie:
adres_bitu
– adres, pod jakim należy zapisywać i spod którego
można odczytywać bit,
poczatek_obszaru_bitband
– 0x20000000 dla obszaru bit-band w pamięci SRAM
oraz 0x40000000 dla obszaru bit-band w segmencie
urządzeń peryferyjnych,
przesuniecie_bajtu
– przesuniecie (offset) w stosunku do początku regionu
bit-band,
numer_bitu
– pozycja bitu w słowie, do którego chcemy uzyskać

3
dostęp.
Na przykład, jeśli chcemy ustawić bit 6 komórki o adresie 0x2000001 (offset = 1),
to zgodnie z przedstawionym wzorem, powinniśmy dokonać zapisu nowej wartości
bitu pod adresem 0x22000038:
adres_bitu = 0x22000000 + 0x01 × 0x20 + 0x06 × 0x04 = 0x22000038.
W
zrozumieniu powyższych zależności pomocny może być także rysunek 1.5.
Przeglądając mapę pamięci warto zwrócić uwagę, że zawiera one nie tylko adresy
typowych obszarów pamięci, ale również obszar adresów przeznaczony dla urządzeń
peryferyjnych. W obszarze t
ym znajdują się rejestry danych i rejestry sterujące
poszczególnych układów peryferyjnych mikrokontrolera. Na przykład w zakresie
adresów od 0x40010800 do 0x40010BFF znajdują się rejestry portu GPIOA,
a w obszarze od 0x40005400 do 0x400057FF
– rejestry układu pierwszego kontrolera
interfejsu I2C. Dzięki takiej organizacji pamięci, dostęp do tych rejestrów jest,
z punktu widzenia programisty, taki sam jak dostęp do dowolnej komórki pamięci.
Jest to więc rozwiązanie bardzo wygodne.
Mikrokontrolery ARM są układami 32-bitowymi. Oznacza to, że podstawową długością
słowa, na jakiej operują, jest słowo 4-bajtowe. Potrafią one, oczywiście,
operować również na słowach 1- i 2-bajtowych. Ponieważ pamięć jest podzielona
na bloki 1-
bajtowe, w przypadku, gdy słowo danych zajmuje więcej niż 1 bajt,
powstaje problem, w jakiej kolejności zapisane są w pamięci kolejne jego bajty.
4. Struktura, przeznaczenie rejestrów mikrokontrolerów rodziny Cortex-Mx.
Rdzeń Cortex-M3 wyposażono w szesnaście rejestrów podstawowych (R0 do R15), przy
czym trzynaście z nich (od R0 do R12) jest rejestrami ogólnego przeznaczenia.
Większość instrukcji 16-bitowych może operować tylko na ośmiu młodszych rejestrach z
zakresu R0 do R7, a tylko niektóre z instrukcji 16-bitowych mogą pracować na rejestrach
„starszych”. Rejestr R13 jest wskaźnikiem stosu. Podzielono go na dwa oddzielne rejestry
bankowane, co oznacza, że w danym momencie jest widoczny tylko jeden. Rejestr R13
składa się z:
–MSP –MainStackPointer– domyślnego rejestru używanego przez przerwania i jądra
systemów operacyjnych, pracujących w trybie uprzywilejowanym,
–PSP –ProcessStackPointer– używanego przez program użytkownika uruchomionym „pod
skrzydłami” systemu operacyjnego.
Pozostałe rejestry: R14 – tzw.LinkRegister – zawiera w sobie adres powrotu,
a R15 – licznik rozkazów – zawiera adres aktualnie wykonywanej instrukcji. Może być
zapisywany w celu sterowania wykonywaniem programu.
Oprócz wyżej wymienionych rejestrów rdzenie Cortex-M3 wyposażono także
w rejestry specjalne:Program Status Register, Interrupt Mask Register, Control Register.
Służą one do sterowania pracą rdzenia i sposobem wykonywania programu, a ich zawartość
może być modyfikowana tylko za pomocą instrukcji specjalnych, nie mogą być
modyfikowane podczas normalnej pracy rdzenia.
5. Tryby pracy mikrokontrolerów rodziny Cortex-Mx.
– tryb uprzywilejowany,
4
– tryb użytkownika
Po zerowaniu jednostka centralna zawsze uruchamia się w trybie uprzywilejowanym, a do
jego zmiany służy najmłodszy bit rejestru specjalnego CONTROL. Praca w tym trybie
umożliwia nieograniczony dostęp do zasobów rdzenia. Gdy program jest wykonywany w
trybie użytkownika, niektóre zasoby rdzenia nie są dostępne, dzięki czemu aplikacja
użytkownika nie ma dostępu do kluczowych – ze względu na niezawodność – elementów
systemu, takich jak m.in. niektóre obszary pamięci.
6. Struktura plików: StartUp.s oraz LPC11xx.h.
LPC11xx.h:
Zawiera definicje struktur i symboli:
-
rejestrów i pól bitowych
-
adresy i ID peryferiów
-
definicje portów PIO
-
nr przerwań itd.
Dostarczone przez producenta procesora (nie projektanta rdzenia!)
Opis z komentarzy pliku LPC11xx.h
StartUP.s
UWAGA
Potrzebna pomoc w t
łumaczeniu
-
definicje przerwań i wektory przerwań
-
konfiguracja źródła zegara
-
konfiguracja zewnętrznego kontrolera magistrali
-
inicjalizacja peryferiów niższych poziomów
- rezerwacja miejsca i inicjalizacja stosu
- Reserves the heap. (?) znowu stos? sterta...
-przechowuje wektory ROM-
> Ram dla systemów z remapowaniem pamięci (?)
-
kontrola przesyłu do funkcji main.c (?)
Link:
http://www.keil.com/support/man/docs/gsac/gsac_strtupcodearm7.htm
Plik dostarczony przez ARM
7. Instrukcje blokowe (If-
Then) mikrokontrolerów rodziny Cortex-Mx, funkcje (intrinsic)
kompilatora środowiska µVision.
Intrinsic:
● __enable_fiq
● __disable_fiq
● __nop
● __wfi
● __wfe
● __sev
● __isb(0)
● __dsb(0)
● __dmb(0)

5
● __rev
8. Adresowanie układów peryferyjnych mikrokontrolerów.
Przestrzeń adresowa układów peryferyjnych rodziny Cortex-Mx wynosi 0.5 GB
adresy od 0x40000000 do 0x5FFFFFFF
9. Deklaracje struktur układów peryferyjnych w pliku LPC11xx.h na przykładzie GPIO.
typedef struct
{
union {
__IO uint32_t MASKED_ACCESS[4096]; /*!< Offset: 0x0000 (R/W) Port data Register for
pins PIOn_0 to PIOn_11 */
struct {
uint32_t RESERVED0[4095];
__IO uint32_t DATA; /*!< Offset: 0x3FFC (R/W) Port data Register */
};
};
uint32_t RESERVED1[4096];
__IO uint32_t DIR; /*!< Offset: 0x8000 (R/W) Data direction Register */
__IO uint32_t IS; /*!< Offset: 0x8004 (R/W) Interrupt sense Register */
__IO uint32_t IBE; /*!< Offset: 0x8008 (R/W) Interrupt both edges Register */
__IO uint32_t IEV; /*!< Offset: 0x800C (R/W) Interrupt event Register */
__IO uint32_t IE; /*!< Offset: 0x8010 (R/W) Interrupt mask Register */
__I uint32_t RIS; /*!< Offset: 0x8014 (R/ ) Raw interrupt status Register */
__I uint32_t MIS; /*!< Offset: 0x8018 (R/ ) Masked interrupt status Register */
__O uint32_t IC; /*!< Offset: 0x801C ( /W) Interrupt clear Register */
} LPC_GPIO_TypeDef;
10. Struktura i programowanie rejestrów portów GPIO, bitowe adresowanie (maskowanie)
portów.
11. Liczniki mikrokontrolera (LPC1114)
– implementacja sprzętowa, zasady
programowania, spr
zętowe generowanie impulsów.
12. Modulacja szerokości impulsów (PWM/PDM) w mikrokontrolerach rodziny Cortex-Mx.
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<16);
// IOCON clock enable
LPC_IOCON->R_PIO0_11 = 3;
// R_PIO0_11 MAT2 B0
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<9);
// Timer32B0 clock enable
LPC_TMR32B0->PR
= 48000-1;
// Timer32B0 clock = 100 kHz
LPC_TMR32B0->MCR = (1<<4);
// Reset on MR1: the TC will be reset if MR1 matches it.
LPC_TMR32B0->EMR |= (3<<10);
// Toggle MR3

6
LPC_TMR32B0->PWMC = 3;
//set channel 3 to PWM mode
LPC_TMR32B0->MR3 = 1;
//set duty
LPC_TMR32B0->MR1 = 18;
//set value for period
LPC_TMR32B0->TCR = 2;
// Reset prescaler and Timer32B0
LPC_TMR32B0->TCR = 1;
// enable Timer32B0
13. Bezszczotkowe sil
niki prądu stałego (BLDC motors) – zasada działania i sterowania,
problemy przełączania napięć/prądów sterujących (dead time).
Urządzenie to składa się z wirnika z magnesami stałymi oraz stojana z uzwojeniami. Uzwojenia
stojana mogą być połączone w układzie trójkąta lub gwiazdy. Moment obrotowy powstaje w
wyniku oddziaływania pól magnetycznych wytwarzanych przez te komponenty. Aby uzyskać
większy moment obrotowy, na wirniku montuje się magnesy ziem rzadkich, na przykład
neodymowe lub samaro-kobaltowe.
Typy sterowania:
a) czujnikowe
-
wykorzystując czujnik Halla, wykrywający konkretny poziom indukcji magnetycznej
wokół czujnika
-
wykorzystując czujniki optyczne umieszczone w dodatkowej ruchomej pokrywie silnika
b) bezczujnikowe
-
wykor
zystując siłe elektromotoryczną
-
wykorzystując pomiary prądów i napięć
-
wykorzystując sterowanie rozmyte i sieci neuronowe
c) sprzętowe
14. Układy szeregowej transmisji danych (RS232, I2C-Bus), protokoły transmisji, zasady
programowania kontrolerów (UART).
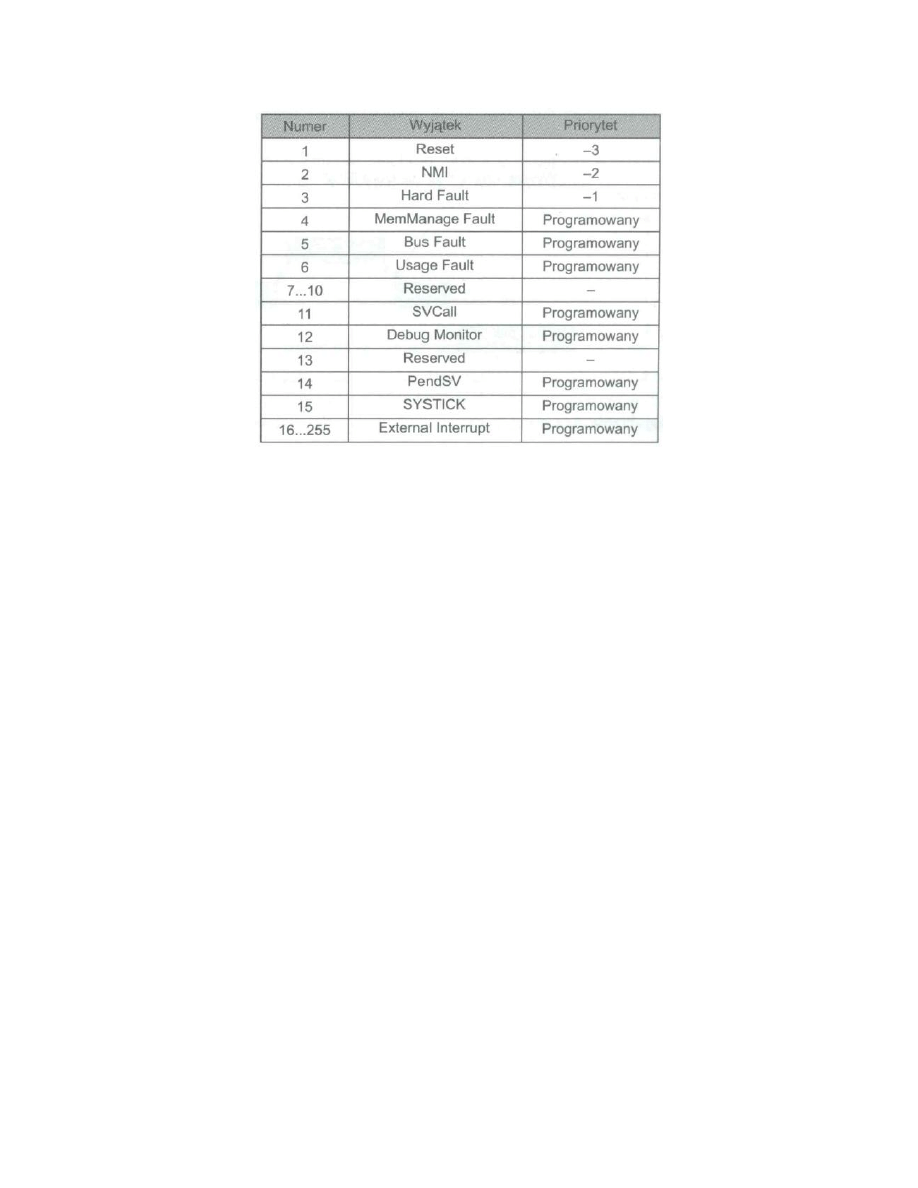
15. Struktura, zasady programowania wyjątków i przerwań, sprzętowa i programowa
obsługa wyjątków i przerwań.
Struktura:
7
Zasady programowania:
Warto korzystać z kontrolera do obsługi przerwań NVIC, ponieważ:
-
upraszcza obsluge przerwań
-
skraca opóźnienia w obsłudze przerwań
-
umożliwia obsłuę przerwań zagnieżdżonych poprzez nadanie przerwaniom priorytom*
-
możliwe sa dynamiczne zmiany priorytetów przerwań nawet w trakcie pracy
mikrokontorlera
-
daje możliwość maskowania przerwań
*mamy (w Rdzeniu Cortex-
M3) do 15 przerwań(wyjątków) systemowych i do 240 przerwan
zewnetrzych (ile faktycznie to zalezy od fizycznego układu). Na uwagę zasługują 3 pierwsze
wyjatki, ponieważ nie są programolne, czyli nie można zmieniać ich priorytetów! (Są
najważniejsze w systemie).
sprzetowa i programowa obsluga przerwan:
Programowe:
kiedy mikrokontroler wykryje przerwanie ustawia bit przyjęcia przerwania (pending bit) oznacza
to ze aby wywołać programowo przerwanie wystarczy ten bit ustawić na 1, Mozna tego dokonac
zapisując do rejestru STIR(Software Trigger Interupt Register) numer interesujacego
przerwania. Wykorzystujac biblioteki firmy ST w celu programowego wygenerwoania przerwania
nalezy uzyc funcji NVIC_SetPendingIRQ().
16. Tryby redukcji mocy w mikrokontrolerach rodziny Cortex-Mx.
Tryb uśpienia (Sleep mode) - w trybie tym tylko procesor zostaje zatrzymany. Wszystkie
urządzenia kontynują operacje i mogą obudzić procesor za pomocą przerwania.

8
Tryb pracy niskiego poboru mocy (Low power run mode) - RC oscylator ustawiony na
minimalny zegar 65 kHz, wykonany z SRAM lub pamięcią Flash oraz wewnętrzny regulator jest
ustawiony w tryb niskiego poboru mocy by zminimalizować prąd pracy regulatora. W trybie tym
częśtotliwość zegara oraz liczba włączonych peryferiów jest ograniczona.
Tryb uśpienia niskiego poboru mocy (Low power sleep mode) - tryb ten osiąga się poprzez
wejście w tryb uśpienia z wewnętrznym regulatorem napięć ustawionym w tryb oszczędzania
energii aby zminimalizować prąd pracy regulatora. W trybie tym częstotliwość zegara i liczba
włączonych peryferii jest ograniczona. Wyzwalany jest przez zdarzenie lub przerwanie.
Tryb zatrzymania z włączonym zegarem czasu rzeczywistego (Stop mode with RTC) - tryb
ten osiąga najniższe zużycie mocy przy jednoczesnym zachowaniu pamięci RAM oraz
zawartości rejestru. Wewnętrzny regulator napięcia jest wyłączony. PLL, MSI RC, HSI RC i HSE
oscylator są wyłączone. LSE i LSI są włączone. Urządzenie może się obudzić z trybu
zatrzymania przez którąkolwiek z linii EXTI.
Tryb zatrzymania z wyłączonym zegarem czasu rzeczywistego (Stop mode without RTC) -
właściwie to to samo co wyżej :)
Tryb gotowości z włączonym zegarem czasu rzeczywistego (Standby mode with RTC) -
służy do osiągnięcia najniższego zużycia energii. Wewnętrzny regulator napięcia jest
wyłączony. PLL, MSI RC, HSI RC i HSE oscylator są wyłączone. LSE i LSI są włączone. Po
przejściu w ten tryb zawartość pamięci RAM i rejestrów jest tracona z wyjątkiem rejestrów
IWDG, RTC, LSI, LSE oscylator, RCC_CSR. Budzi się za pomocą zewnętrznego resetu(NRST
pin) zboczem narastajacym na jednym z trzech WKUP pins.
Tryb gotowości z wyłączonym zegarem czasu rzeczywistego (Standby mode without RTC)
-
to co powyżej :)
17. Standard AAPCS
– specyfikacja, wady i zalety.
AAPCS definuje w jaki sposób podprogramy mogą być pisane oddzielnie, oddzielnie
kompilowane cz
y asemblowane tak by mogły pracować wspólnie. Opisuje oddziaływania
poleceń programu wywołującego oraz wywoływanego:
-
wzywający program określa w kodzie kiedy wywoływany program zaczyna działać
-
wywoływany program dba o możliwość powrotu do porzedniego podprogramu w odpowiedniej
lini kodu
-
wywoływany program musi mię prawo do zmian w poprzednim podprogramie
http://infocenter.arm.com/help/topic/com.arm.doc.ihi0042e/IHI0042E_aapcs.pdf
AAPCS is the ARM Architecture Procedure Calling Standard. It is a convention which allows high level
languages to interwork.
9
Rn
Name
Usage under AAPCS
R0..3
A1..4
Argument registers. These hold the first four function arguments on a function call
and the return value on a function return. A function may corrupt these registers
and use them as general scratch registers within the function.
R4..8
V1..5
General variable registers. The function must preserve the callee values of these
registers.
R9
V6 SB
General variable register. The function must preserve the callee value of this
register except when compiling for read-write position independence (RWPI). Then
R9 holds the static base address. This is the address of the read-write data.
R10
V7 SL
General variable register. The function must preserve the callee value of this
register except when compiling with stack limit checking. Then R10 holds the stack
limit address.
R11
V8 FP
General variable register. The function must preserve the callee value of this
register except when compiling using a frame pointer. Only old versions of armcc
use a frame pointer.
R12
IP
A general scratch register that the function can corrupt. It is useful as a scratch
register for function veneers or other intra-procedure call requirements.
R13
SP
The stack pointer, pointing to the full descending stack.
R14
LR
The link register. On a function call this holds the return address.
R15
PC
The program counter.
Zgodnie za standardem AAPCS (ARM Architecture Procedure Call Standard) rejestry procesora mają
przypisane konkretne znaczenie,
● Rejestry r0 – r3 (a1-a4) przeznaczone są do przekazywania parametrów do procedur lub
zwracania rezultatów funkcji (wartości mogą być również przekazywane przez stos).
● Rejestry r4-r8, r10, r11 przeznaczone są do przechowywania zmiennych lokalnych procedur,
● Rejestry r12-r15 mają zawsze przypisane specjalne przeznaczenie: IP, SP, LR, PC.
● Stos powinien być wyrównany do granicy 8 bajtów.
10
18. Standard CMSIS
– specyfikacja, zastosowania.
Standard CMSIS jest to uniwersalny interfejs programowy, stworzony przez firmę ARM, który
umożliwia komunikację w peryferiami i rdzeniem Cortex za pomocą ustandaryzowanych funkcji.
CMSIS dostarcza mech
anizmy do obsługi układów peryferyjnych, systemów operacyjnych
czasu rzeczywistego oraz aplikacji wykorzystujących interfejsy komunikacyjne: Ethernet, UART,
SPI. Standard CMSIS został podzielony na dwie podstawowe warstwy: Core Peripheral Access
Layer oraz
Middleware Access Layer. Pierwsza warstwa zawiera definicje nazw oraz umożliwia
dostęp do rejestrów rdzenia oraz urządzeń peryferyjnych, natomiast druga udostępnia
mechanizmy do współpracy z interfejsami komunikacyjnymi. Dodatkowo, wymienione wyżej
warstw
y zostały rozszerzone przez producentów mikrokontrolerów, którzy współpracowali przy
tworzeniu CMSIS, o dwie „warstwy”: Device Peripheral Access Layer oraz Access Functions for
Peripherals.
Literatura
1.
The definitive guide to the ARM Cortex-M3 Joseph Yiu.
2.
Pytania kolokwium:
1.Parametry transmisji UART
2.W jakim celu stosuje się CMSIS/AAPCS
3.Co to jest stacking/unstacking i kiedy się wykorzystuje? (jakoś tak)
4.Opisać dostęp aligned i unaligned
5.Pytanie o SysTick
+1. W jaki spos
ób jest taktowany rdzeń (core) i układy peryferyjne Cortex M?
R
dzen taktowany jest poprzez uklady zegarowe zalezne od danego producenta. Uklady
peryferyjne moga miec
swoje oddzielne zegary, z dodatkowymi dzielnikami.
- Generalnie pytanie jest malo precyzyjne i powinno dotyczyc raczej konkretnego
mikrokontrolera, gdyz sam
rdzen cortex m nie posiada ukladow zegarowych, a jedyne peryferia wbudowane w ten rdzen to
SysTick i
kontroler przerwan NVIC.
2. Co oznacza poj
ęcie „bit-band operation”?
mo
żliwość manipulacji bitami w RAM i peryferiach, np portach Możesz traktować dany pin jak
zmienn
ą (i np.
przekazywa
ć pin jako parametr funkcji), bez używania do tego rejestrów
http://infocenter.arm.com/help/index.jsp?topic=/com.arm.doc.ddi0337e/Behcjiic.html

11
3. Jak jest cel wprowadzenia kolejki FIFO w porcie szeregowym LPCxx(CORTEX
M)?
(Przemek) Hmm
… pytanie odnosi się do mikrokontrolera LPCxx, tego co mamy na laborkach
(chyba).
Kolejkowanie FIFO w porcie szeregowym(USART/UART) ma na celu odci
ążyć rdzeń
mikrokontrolera.
Dzi
ęki czemu zapis/odczyt z portu szeregowego odbywa się sprzętowo.
4. Na czym polega arbitra
ż w standardzie I2C-BUS?
W systemie I2CBUS mo
że dojść do sytuacji, że więcej niż jedno urządzenie zechce przejąć
kontrol
ę nad łączem
(by
ć masterem). Zdefiniowano więc specjalną procedurę arbitrażową, która wyłania jednego
mastera spo
śród
urz
ądzeń rywalizujących o sterowanie transmisją. Arbitraż oparto na zasadzie kontroli
zgodno
ści stanu linii
SDA z warto
ścią logiczną bitu wyprowadzanego przez dane urządzenie. Odczyty stanu linii
SDA odbywaj
ą
si
ę w ściśle określonych momentach wyznaczanych sygnałem zegarowym. Trzeba pamiętać, że
podczas ]
arbitra
żu dwa lub więcej urządzenia wyprowadzają swoje bity na linię danych i może się
zdarzy
ć, że gdy
jedno wyprowadza jedynk
ę, to drugie wyprowadza zero. Na linii SDA w takim przypadku ustali
si
ę stan niski,
poniewa
ż dla podłączonych do tej linii urządzeń realizuje ona funkcję „iloczynu na drucie”.
Urz
ądzenie, które
chcia
ło wyprowadzić jedynkę, po stwierdzeniu, że na linii SDA jest zero, wypada z arbitrażu
(wy
łącza swoje
wyj
ście). Widać więc, że przedstawione rozwiązanie preferuje urządzenie, które w czasie
arbitra
żu wysyła
najni
ższa wartość binarną. Dla poprawnego przeprowadzenia arbitrażu konieczna jest
synchronizacja sygna
łów
zegarowych urz
ądzeń, które walczą o sterowanie transmisją. Wszystkie urządzenia generują
swoje w
łasne
sygna
ły zegarowe na linii SCL umożliwiając przesył danych oraz potwierdzenia. Dane na linii
SDA s
ą ważne
tylko dla wysokiego stanu linii zegara. Synchronizacj
ę przesyłu danych uzyskuje się poprzez
wykorzystanie
funkcji
„iloczynu na drucie”, tym razem realizowanej na linii SCL. Linia SCL będzie tak długo w
stanie niskim,
a
ż wszystkie urządzenia nie zwolnią tej linii. Długość stanu wysokiego na linii SCL jest zatem
okre
ślona przez
czas trwania najkr
ótszego okresu spośród sygnałów zegarowych, a długość stanu niskiego
przez czas trwania
najd
łuższego okresu spośród sygnałów zegarowych. Urządzenie master, które utraciło kontrolę
nad magistral
ą,
mo
że generować tylko sygnały zegarowe do końca bajtu, przy którym utraciło kontrolę. Arbitraż
nie jest
dozwolony w trakcie powtarzanego warunku START lub STOP.
5 Jak interpretowa
ć pojęcie „wyjątek” w CortexM
Jest to przerwanie z najwy
ższym możliwym (ujemnym) priorytetem, którego nie można
ustawi
ć programowo. Przykładem takiego przerwania jest HardFault

12
6 Jakie typy przerwa
ń występują w Cortex M i co jest ich źrodlem?
http://infocenter.arm.com/help/index.jsp?topic=/com.arm.doc.dui0497a/BABBGBE
C.html
Exception priorities and preemption
– Lower numbers take higher precedence
– If multiple exceptions have the same priority
number, the pending exception with the lowest
exception number takes precedence.
– Only exceptions with a higher priority (lower
priority number) can preempt an active exception.
7 Jakie jest przeznaczanie i w
łaściwości układu SisTick w Coretx M
SysTick to timer wbudowany w NVIC. 24-bitowy licznik zliczaj
ący w dół odmierza, określone
przez programist
ę,
interwa
ły czasowe. Przejście przez zero powoduje wygenerowanie przerwania (jeśli włączone).
(Przemek) Cz
ęsto wykorzystwany przez sytemy operacyjne do odmierzania czasu.
bez blokowania i bez timeout
’u, więc d
C - j
ądro posiadać musi, cała reszta jest opcjonalna choć scheduler jest potrzebny do systemu
operacyjnego.
a
11.
--------------------------------------------------------------------
(Olek) U=50/150+30/90+40/160=0,917 > 0,779 PORPRAWKA, jest planowalna, po
rozrysowaniu wykresu daje
sie zauwazyc ze grupa jest planowalna
(Ada) To rozrysuj :)
(mateusz)
https://suw.biblos.pk.edu.pl/resources/i5/i9/i9/i4/r5994/JamrozL_SzeregowanieZadan
Cyklicznych.pdf
(W
ładek) Example z wikipedi - Punkt dla Ady
Process Execution
Time
Period
P1 1 8
P2 2 5
P3 2 10
The utilization will be:
The sufficient condition for processes, under which we can conclude that the system is
schedulable is:
Since the system is surely schedulable.
But remember, this condition is not a necessary one. So we cannot say that a system with
higher utilization is not
schedulable with this scheduling algorithm
.
Aczkolwiek po rozrysowaniu potwierdzam,
że planowalna
-----------------------------------------------------------------------------------------------
DODATKOWE PYTANIA Z WYK
ŁADU U DR. PĘKALI (zaznaczył, że większą wagę ma część
St
ępnia ze
wzgl
ędu na ilość godzin)
Zablokowanie tasku wykonuj
ącego wysyłanie komunikatu do kolejki następuje gdy:
- kolejka jest pe
łna
Obiekt j
ądra rywalizujący o czas procesora to:
- task
13
Szeregowanie priorytetowe z wyw
łaszczaniem to:
- podstawowa regu
ła szeregowania
Czas zmiany kontekstu:
- czas za
ładowani tasku… (ktoś kto był na wykładzie mógłby uzupełnić)
Podstawowa regu
ła szeregowania tasków o tym samym priorytecie to:
- algorytm rotacyjny
Priorytet tasku, kt
óry objął… mutex:
- mechanizm zapobiegania inwersji priorytetu
Pytanie z dzisiaj:
Najwa
żniejsze elementy architektury mikrokomputera wykorzystane do budowy usług
czasomierzy:
- programowalny uk
ład PIT (PID to sterownik rozniczujaco całkujacy ;) mateusz)
/// dorzucam cos od siebie ;) /mateusz
CMSIS - Cortex Microcontroller Software Interface Standard
Strategia ARM, polegaj
ąca na ułatwieniu przenoszenia oprogramowania pomiędzy
mikrokontrolerami r
óżnych
producent
ów, opiera się na dwóch elementach: sprzęcie i oprogramowaniu. Od strony
sprz
ętowej w architekturze
Cortex-Mx zintegrowano wi
ęcej bloków zwiększających ich możliwości funkcjonalne niż w
architekturze
wcze
śniejszych rdzeni ARM7. Na przykład układy Cortex-Mx od różnych producentów mają nie
tylko tak
ą
sam
ą część procesorową (CPU), ale także taki sam wektorowy kontroler przerwań z
zagnie
żdżeniami (NVIC –
Nested Vectored Interrupt Controller), taki sam rdze
ń timera systemowego (SysTick) i taki sam
modu
ł logiczny
do wykrywania b
łędów w programie (debugowania).To gwarantuje, że każde oprogramowanie
standardowe
(firmware) b
ędzie miało te same właściwości funkcjonalne po uruchomieniu na wszystkich
mikrokontrolerach
wyposa
żonych w rdzeń Cortex-Mx.
Architektura Cortex M
-Architektura 32-bitowa
-RISC
-mno
żenie 32x32bit
-rozkazy thumb i thumb2
-instrukcje 16 i 32 bitowe
-13-stage pipelining
-sprz
ętowe mnożenie i dzielenie stało i zmiennoprzecinkowe (w zależności od rodzaju cortex’a)
-SysTick Timer
-Bit Banding
-Memory Protection Unit (MPU)
RCC (Reset and Clock Control) to rejestry odpowiedzialne za konfiguracj
ę zegarów (od wyboru
źródła sygnału
zegarowego do konfiguracji cz
ęstotliwości pracy poszczególnych bloków procesora). NVIC
(Nested Vectored
Interrupt Controller) to kontroler przerwa
ń sprzętowych. Odpowiada m.in. za priorytety
przerwa
ń, ich konfigurację,
sterowanie trybami poboru mocy, blokowanie przerwa
ń (to znaczy programista sobie to
dopasowuje pod siebie).

14
SysTick to timer wbudowany w NVIC. 24-bitowy licznik zliczaj
ący w dół odmierza, określone
przez programist
ę,
interwa
ły czasowe. Przejście przez zero powoduje wygenerowanie przerwania (jeśli włączone).
Plik startup:
-tablica wektor
ów przerwan-tablica wektorów jest zbiorem ważnych dla działania programu
adres
ów. Zawiera
adres pocz
ątku stosu, wektor resetu (czyli adres od którego zaczyna się program), także adresy
funkcji obs
ługi
wyj
ątków i adresy funkcji obsługi przerwań.
-Adresy w reprezentacji symbolicznej (wg CMSIS)
-procedury obs
ługi wyjątków (przykładowe procedury)
-procedur obs
ługi przerwań
Taktowanie
-
AHBCLKCTRL odpalamy taktowanie dla poszczeg
ólnych zasobow/peryferiow procka.
-kwarc 12MHz zwielokratniany w petli PLL do 48MHZ (procek z laborek)
-dzielniki o dowolna warto
ść
Wyj
ątki systemowe
trzy wyj
ątki systemowe, dostępne w architekturze Cortex. Docelowym ich zadaniem jest
praca pod kontrol
ą
systemu operacyjnego, aczkolwiek w aplikacjach bez OS r
ównież można je
wykorzysta
ć do zapewnienia większej
kontroli i stabilno
ści pracy.
Do cyklicznego prze
łączania kontekstu zadań stworzono systemowy, 24–bitowy, timer
SysTick. Jego zadaniem
jest generowanie w okre
ślonych odstępach czasu przerwania, a funkcja jego obsługi
mo
że zajmować się właśnie
prze
łączaniem kontekstu zadań.
Wyj
ątek SVC (System serVice Call)
W dobrze zaprojektowanym systemie operacyjnym, uruchomiona w nim aplikacja nie
mo
że bezpośrednio odwołać
si
ę do sprzętu. Odnosząc to zdanie do konkretnego przypadku można powiedzieć, że
aplikacja u
żytkownika nie ma
mo
żliwości operowania na portach wejścia/wyjścia inaczej, niż za pośrednictwem
systemu operacyjnego. Takie
ograniczenia w stosunku do aplikacji uruchamianych w systemie operacyjnym maj
ą
bardzo istotne znaczenie
ze wzgl
ędu na ograniczone zaufanie do programów użytkownika. W związku z tym musi
istnie
ć mechanizm
pozwalaj
ący na bezpieczne korzystanie ze sprzętu przez uruchomiony w systemie
operacyjnym program
u
żytkownika. Do realizacji tego zadania przeznaczono wyjątek SVC.
Je
śli program użytkownika chce skorzystać ze sprzętu, to musi wywołać funkcję SVC, a
dopiero ta realizuje
zadanie z u
życiem wymaganego sprzętu.
Wyj
ątek PendSV
Jak napisano wcze
śniej, w najprostszym systemie operacyjnym, za przełączanie
kontekst
ów uruchomionych

15
zada
ń odpowiada timer SysTick. Podczas pracy takiego systemu może powstać prosty,
cho
ć nie zawsze oczywisty
problem.
Podczas realizacji zadanie (program u
żytkownika) może zostać zgłoszone przerwanie,
kt
óre wywłaszczy
dotychczasowy proces. Je
śli podczas obsługi zgłoszonego przerwania timer SysTick
przerwie je i system
operacyjny rozpocznie prze
łączanie kontekstów zadań, to wychodząc z funkcji obsługi
przerwania od timera
SysTick, OS b
ędzie próbował zmusić mikrokontroler do rozpoczęcia realizacji nowego
zadania. Jest to rzecz jasna
zachowanie b
łędne, ponieważ obsługa pierwszego przerwania zostanie znacznie
op
óźniona.
Rozwi
ązaniem tego problemu jest zastosowanie wyjątku PendSV. Jego programowalny
priorytet jest ustawiany na
najni
ższy możliwy, dzięki czemu przerwanie to nigdy nie wywłaszczy innych
obs
ługiwanych przerwań.
Przeanalizujmy teraz zachowanie systemu z zaimplementowan
ą obsługą PendSV.
Za
łóżmy, że zadanie
realizowane w systemie nie ma aktualnie nic do zrobienia. Generuje wyj
ątek SVC,
kt
órego zadaniem jest
przygotowanie do prze
łączenia kontekstu zadań i wywołanie przerwania PendSV.
Dopiero to ostatnie przerwanie
wykonuje w
łaściwe przełączenie kontekstów tak, że gdy mikrokontroler powraca do
normalnego wykonywania
programu, to w
ówczas podejmowane już jest wykonywanie następnego zadania.
Je
śli w trakcie przełączania kontekstów zadań w funkcji obsługi przerwania PendSV
system zarejestruje inne
przerwanie, to prze
łączanie kontekstów zostaje wstrzymane przez wywłaszczenie
PendSV (pami
ętajmy, że jego
priorytet jest najni
ższy).
PendSV i SysTick
Podobnie ma si
ę sprawa wtedy, gdy system operacyjny przygotowuje przełączanie kontekstów
zada
ń przy
pomocy przerwania od timera SysTick. W takiej sytuacji, zak
ładając, że przerwanie od SysTick
ma wysoki
priorytet, a chwil
ę wcześniej był obsługiwany jakiś inny wyjątek, nastąpi wywłaszczenie tego
ostatniego na rzecz
SysTick.
W zwi
ązku z tym, że obsługa wywłaszczonego przerwania jest zdecydowanie ważniejsza od
wykonywania
uruchomionych w systemie zada
ń, to funkcja obsługi przerwania od timera SysTick (podobnie
jak SVC) tylko
przygotowuje system do prze
łączenia kontekstu zadań i generuje wyjątek PendSV. Teraz, skoro
PendSV ma
najni
ższy priorytet, mikrokontroler wraca do obsługi wywłaszczonego wcześniej przerwania.
Gdy czynno
ści

16
obs
ługi przerwania zostaną zakończone, to oczekujący wyjątek PendSV zaczyna być
realizowany, konsekwencj
ą
czego jest prze
łączenie kontekstu i rozpoczęcie obsługi kolejnego zadania uruchomionego w
systemie
Na czym polega 'Unaligned Word Data Transfer' w procesorach Cortex-M3?
Tradycyjnie, procesory ARM (takie jak ARM7/ARM9/ARM10) pozwalaj
ą jedynie na transfer
wyr
ównany (aligned
transfer).Przekazywanie s
łowa muszą mieć adres bitu[1] i bitu [0] równe 0 - dane mogą być
zlokalizowane w
0x1000 lub 0x1004, ale nie mog
ą być usytuowane in0x1001, 0x1002 lub 0x1003. Przeniesienie
po
łowy słowa
musz
ą mieć adres bitu[0] równy 0 - dane mogą znajdować się w adresie 0x1000 lub 0x1002, ale
nie mog
ą być
0x1001.
Cortex-M3 wspiera transfer niewyr
ównany (unaligned transfer) na pojedynczych przejściach,
pami
ęć dostępu do
danych mo
że być zdefiniowana jako wyrównana lub niewyrównana.
Na czym polega i kiedy jest stosowany 'Stacking' w procesorach Cortex-Mx?
Kiedy wyst
ąpi wyjątek wrzucane jest 8 rejestrów do stosu:
-PC (program counter)
-PSR (program status register)
-R0-R3
-R12
-LR (link register)
Je
śli uruchomiony kod używa PSP (process stack pointer) stos procesu będzie użyty
Je
śli uruchomiony kod używa MSP (main stack pointer) główny stos będzie użyty
Potem g
łówny stos zawsze będzie używany podczas obsługi, więc wszystkie zagnieżdżone
przerwania b
ędą
korzysta
ć z głównego stosu
Zagadnienia, które były poruszane na początkowych wykładach:
-biblioteka CMSIS
-
architektrua Cortexów
-taktowanie
-porowanie Cortex z STM
-SysTic Timer
-GPIO
No i omawiał pliki startup
Miałam takie hasła w notatkach zapisane. Więcej
1. Jakie kroki należy wykonać w kompilatorze C dla procesora ARM 7 w środowisku Keil, aby
obsłużyć przerwanie IRQ?
• Ustawienie odpowiednich rejestrów, obsługa przerwania (skasowanie flagi,
uaktualnienie priorytetów wpisaniem dowolnej wartości do VICVectAddr)
2. Dlaczego przy zagnieżdżeniu przerwań IRQ w procesorze ARM7 konieczne są dodatkowe
makro-procedury?

17
• Aby nie stracić LG R14
3. Co należy wykonać w środowisku Keil Real View dla procesora ARM7, aby obsłużyć
przerwanie FIQ?
• Ustawienie rejestrów, obsługa przerwania, startup (stos, import, handler)
4. W których wyjątkach w procesorze ARM7 blokowane są przerwania IRQ, a w których FIQ?
• IRQ wszędzie, FIQ w restet i FIQ
5. Co trzeba zrobić, żeby w kompilatorach arm zrobić wstawkę asm
• __asm(„nop”)
6. Zainicjalizować przerwanie niewektoryzowane od EINT1
• Kodzik w C
7. Kiedy występuje abort i jakie są konsekwencje.
• Odczyt lub zapis do niedozwolonej pamięci, konsekwencja jest wyjątek, jeśli MMU to
nic
8. Jak w programie w kompilatorze keil można umieścić zmienną na stałe w pamięci.
• Zmienna globalna
9. Jakie ma funkcje PSR w ARM (czyli cpsr i spsr)
• CPSR ma flagi, blokowanie przerwan, tryb T, tryby.
User nie można zmienic CPSR, reszta może CPSR, SPSR można zmieniać wiec user
i system nie bo nie maja
10. Skoki w arm7 (chodziło o napisanie co i jak z R15 i R14 jak są wykorzystywane itd)
• Zapisanie adresu powrotu w R14 z R15 (plus minus ile?)
11.
Tryb Thumb co to jest i do czego służy.
• Tryb 16bitowy, do zaoszczędzenia pamieci (coś mało tych jego plusów:/)
12. Po co w arm są pseudo-instrukcje.
• Ułatwiają pisanie kodu i skracaja jego długość, np. instrukcja LDR
13. Wyjaśnić różnice w przyjęciu przerwania IRQ i FIQ dla procesorów ARM7.
• Bankowanie rejestrów, brak skoku do obsługi, najwyższy priorytet, w praktyce
stosowane tylko jedno
14. Jak przygotować i jak zareaguje ARM7 na zadanie przerwania tylko od licznika T0?
• Napisać kod dla Timera, i kiedy wystapi przerwani
15. Opisać VIC Vector Address
• VIC wpisuje tu adres przerwania, który wpisywany jest do PC (strona38), Na koniec
wpisujemy żeby VIC zaktualizował priorytety
16. Adresowanie stosu
• Ostatni tryb uzytkownika, nie wszystkie stosy musza być zainicjalizowane
17. Jak w procesorze ARM7 poradzono sobie z wolną pamięcią Flash (jak pogodzono
czestotliwosc pracy rdzenia i duzo wolniejszej pamieci)?
• ładowanie krytycznych części programu do RAM i uruchamianie ich z RAMu,
używanie cache,
MAM - Memory Accelerator Module -
pojedyńczy dostęp do Flash za pomocą MAM,
pobiera cztery instrukcje ARM lub 8 THUMB
18. Dlaczego rejestry DLL i DLM są 8 bitowe?
• Bo zostało to skopiowane z C51
19. Dlaczego we wzorze na prędkość transmisji UART występuje 16?

18
• Dzięki temu maksymalna prędkość transmisji wynosi 1/16 cyklu. Jest to
zabezpieczenie które gwarantuje poprawne wykrycie bitu startu
20. Do czego wykorzystywane sa w ARMie rejesty R8-R15.
• R8-R12 ogolnego przeznaczenia bankowane w fiq,
R9 zaleznie od platformy może być bazą stałą (SB) lub Thread register (TR) lub do
przekazywania zmiennych v6,
R12 IP może być uzywany przez linker jako scratch register miedzy procedura
i jej podprocedura lub jako rejestr przekazujacy zmienne miedzy podprocedurami, R13
SP, R14 LR, R15 PC
21. W jakich warunkach można zmieniać a w jakich nie rejestry PSR w ARMie
• CPSR można modyfikowac we wszystkich trybach uprzywilejowanych, w USERZE
można zmieniać flagi pośrednio,
SPSR można zmieniac tylko w trybie wyjątków ponieważ tylko tam wystepują.
Dla potomnych:
1. Co startup ustawia jeśli chodzi o taktowanie.
2. Opisać PSR.
3. Co trzeba zrobić, żeby obsłużyć przerwanie IRQ od timera0
4. Dlaczego FIQ jest szybsze niż IRQ
5. Konsekwencje zastosowania standardu AAPCS dla przerwań FIQ
6. Co trzeba zrobić, żeby ustawić taktowanie UART-a.
Zebrane odpowiedzi na pytania:
1. Co startup ustawia jeśli chodzi o taktowanie.
ustawia pracę pętli PLL (parametry M i P), która zmienia Ci częstotliwość oscylatora na
częstotliwość taktującą rdzeń. Ustawia też dzielinik dla magistrali APB (dla peryferii).
<MrSaturday>
2. Opisać PSR.
nie chce mi się tego wszystkiego pisać ;p
3. Co trzeba zrobić, żeby obsłużyć przerwanie IRQ od timera0
VICIntSelect = 0; lub VICIntSelect &= ~(1 << 4);
VICIntEnable = 1<<4;
VICVectAddr3 = (unsigned int)T1_IRQ;
VICVectCntl3 = 0x20 | 4;
napisać obsługę przerwania:
__irq void T1_IRQ(void)
{
(...)
VICVectAddr = 0;

19
}
4. Dlaczego FIQ jest szybsze niż IRQ
-
FIQ jest niewektoryzowane (nie ma priorytetów)
-
w FIQ bankowane są rejestry R8-R12 przez co nie trzeba tracić cykli na zrzucenie ich na stos
-
najwyższy priorytet (nie wiem czy to trzeba pisać)
-
brak zagnieżdzeń
5.
Konsekwencje zastosowania standardu AAPCS dla przerwań FIQ
standard AAPCS wymaga, żebyś przy wejściu do przerwania zrzucił na stos rejestry R0 i R1. W
przerwaniach FIQ to jest w większości przypadków bez sensu, bo po to masz bankowane
rejestry R8-
R14, żeby niczego na stos nie zrzucać. Powoduje to że przerwanie działa wolniej
(najpierw push, potem pop). <MrSaturday>
6. Co trzeba zrobić, żeby ustawić taktowanie UART-a.
UnLCR = 0x8x; // DLAB = 1 (0x80);
UnDLL = y;
UnDLM = z;
// ewentualnie bity w
UnFDR odpowiadające za MULVAL i DivADDVal
UnLCR = 0x0x; // DLAB = 0;
1. opisać rejestry od R0-R15
2. Co zrobić żeby na portach p1.13-24 na wyjściu było logiczne 0
3. zrobić sprzętowo sygnał prostokątny o wypełnieniu 1/2
4.dlaczego w startupie ustawiany jest usermode na koncu pliku
5.coś w stylu dlaczego jest problem z zagnieżdżeniami przerwań w armie
6. dlaczego trzeba wpisać w UxLCR0=x080 żeby można było zmienić UxDLL i UxDLM
1. NA czym polega Aligned Word Data Transfer w procesorach Cortex M3
2. W jakim celu ejst stosowany standard AAPCS?
3. Co oznacza skrót xPSR w procesorach Cortex M0 i jakie jest jego przeznaczenie ?
4. Jakie tryby(rodzaje) pracy maja procesory Cortex M3? Jakie typy stosu wykorzystują te tryby
?
5. W jaki sposób sa adresowane wezły magistrali I2C BUS?
6. Na czym polega ki keidy ejst stosowany Unstracking?
Wyszukiwarka
Podobne podstrony:
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
Misc3 id 302777 Nieznany
cw med 5 id 122239 Nieznany
D20031152Lj id 130579 Nieznany
mechanika 3 id 290735 Nieznany
więcej podobnych podstron