PODSTAWY ROBOTYKI
Nazwa ćwiczenia:
Badanie wybranych parametrów funkcjonalnych robotów przemysłowych.
Prowadzący:
Dr in
ż
. Marta Góra
LABORATORIUM Z PODSTAW ROBOTYKI
Temat: Badanie wybranych parametrów funkcjonalnych robotów przemysłowych
Zespół
Oceny
Grupa
12A4
1)Mateusz Sito
2)Tomasz Siwek
Data
3)Mateusz Żołądkiewicz
Kraków, 2012/2013
Wydział Mechaniczny
Kierunek: Automatyka i Robotyka
1. Wstęp teoretyczny.
Na zajęciach laboratoryjnych dokonywaliśmy pomiarów powtarzalności pozycjonowania i
sztywności manipulatora przemysłowego Fanuc S420F. Do dokonania pomiarów używaliśmy
specjalnie skonstruowanego stanowiska składającego się z trzech czujników linkowych
połączonych z roboczą częścią manipulatora. Wskazania czujnika (Volt) należało przeliczyć w
stosunku 10:1 na jednostkę położenia (metr).
2. Przedstawienie obiektu badań.
a) Manipulator o strukturze szeregowej
Obiektem badań jest wcześniej wspomniany manipulator szeregowy posiadających 6 par
obrotowych. Robot może byś stosowany do np. obsługi wtryskarek czy pras. Jego udźwig
maksymalny to 120 kg, dokładność teoretyczna wynosi +/- 0,5 mm.
b) Analiza strukturalna
Rodzaje par kinematycznych
Obrotowe
Liczba więzów
5
Liczba stopni swobody
1
Klasa par kinematycznych
5
Oznaczenie
Ruchliwość manipulatora możemy obliczyć z zależności:
W = 6n
r
- 5p
5
- 4p
4
- 3p
3
- 2p
2
- p
1
Gdzie:
n
r
- liczba ogniw ( ruchomych )
p
5
-p
1
- liczba par klasy określonej indeksem
W naszym wypadku ruchliwość wynosi :
W = 6*6 – 5*6 = 6
c) Pozycja i orientacja członu roboczego względem układu podstawy manipulatora.
Wektor pozycji:
,
=
, ,
Macierz orientacji członu roboczego względem podstawy manipulatora:
B
a,m
=
cos( ,
) cos( ,
) cos( ,
)
cos( ,
) cos( ,
) cos( ,
)
cos( , ) cos( , ) cos( , )
3. Wyznaczenie powtarzalności pozycjonowania manipulatora
a) Stanowisko pomiarowe.
b) Wyznaczenie pozycji członu roboczego względem układu ( xyz ) na podstawie długości l
inek.
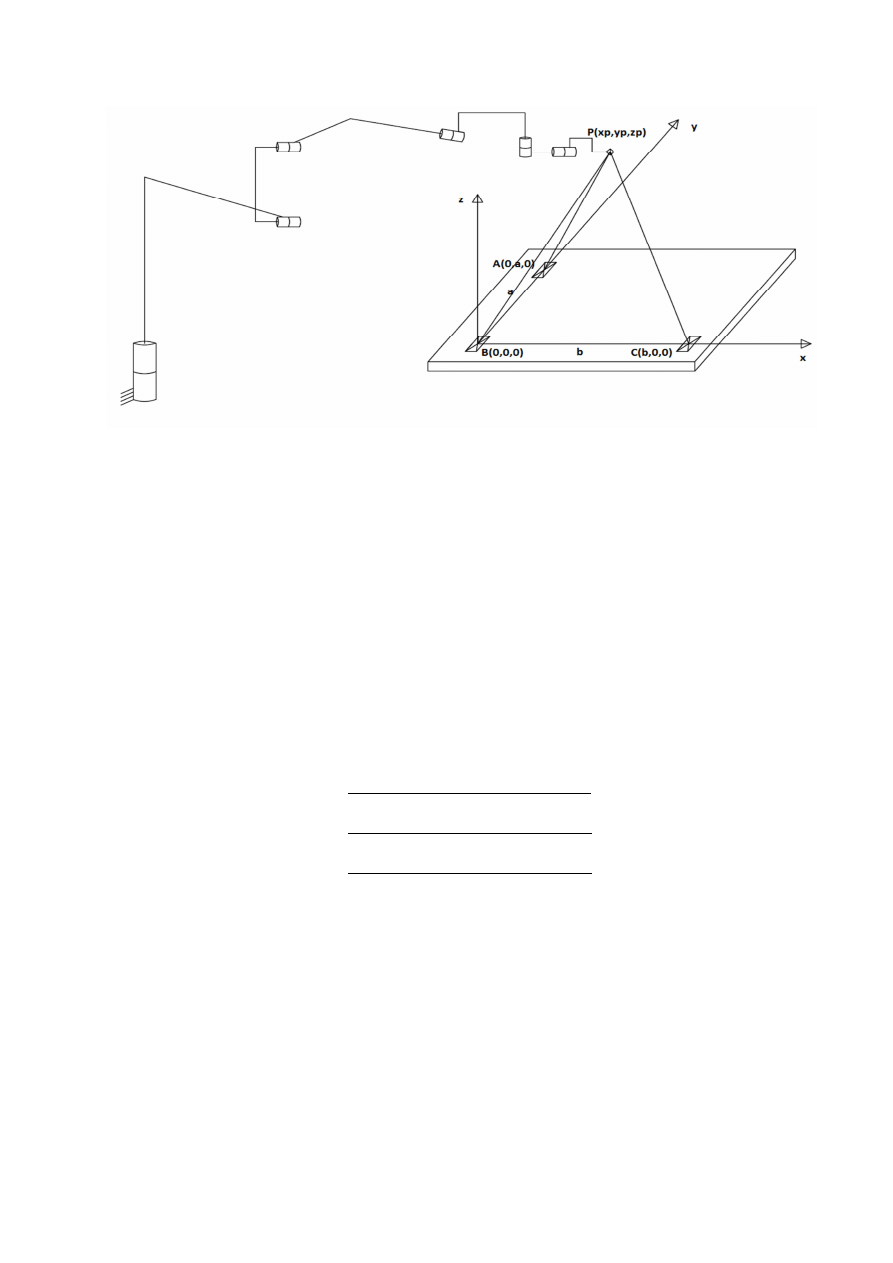
Długość linek:
|AP|=l
1
|BP|=l
2
|CP|=l
3
Na podstawie zależności z rysunku wynika :
= (
0)
!"
(
0)
= (
0)
0"
(
0)
#
= (
$)
0"
(
0)
= %(
0)
0"
(
0)
= %(
0)
0"
(
0)
#
= %(
$)
0"
(
0)
Z powyższego układu równań wynika:
=
2!
!
=
=
2$
$
Odejmujemy stronami równania pierwsze i drugie:
= 2!
!
2! = − − !
=
− + !
2!
Następnie odejmujemy drugie równanie od trzeciego otrzymamy :
#
− = −2$ + $
2$ = −
#
+ $
=
−
#
+ $
2$
Z drugiego równania otrzymujemy:
= ±% −
−
Jednak ze względu na nasz przypadek ( niemożliwość osiągnięcia pozycji od dołu stanowiska
pomiarowego.
= % −
−
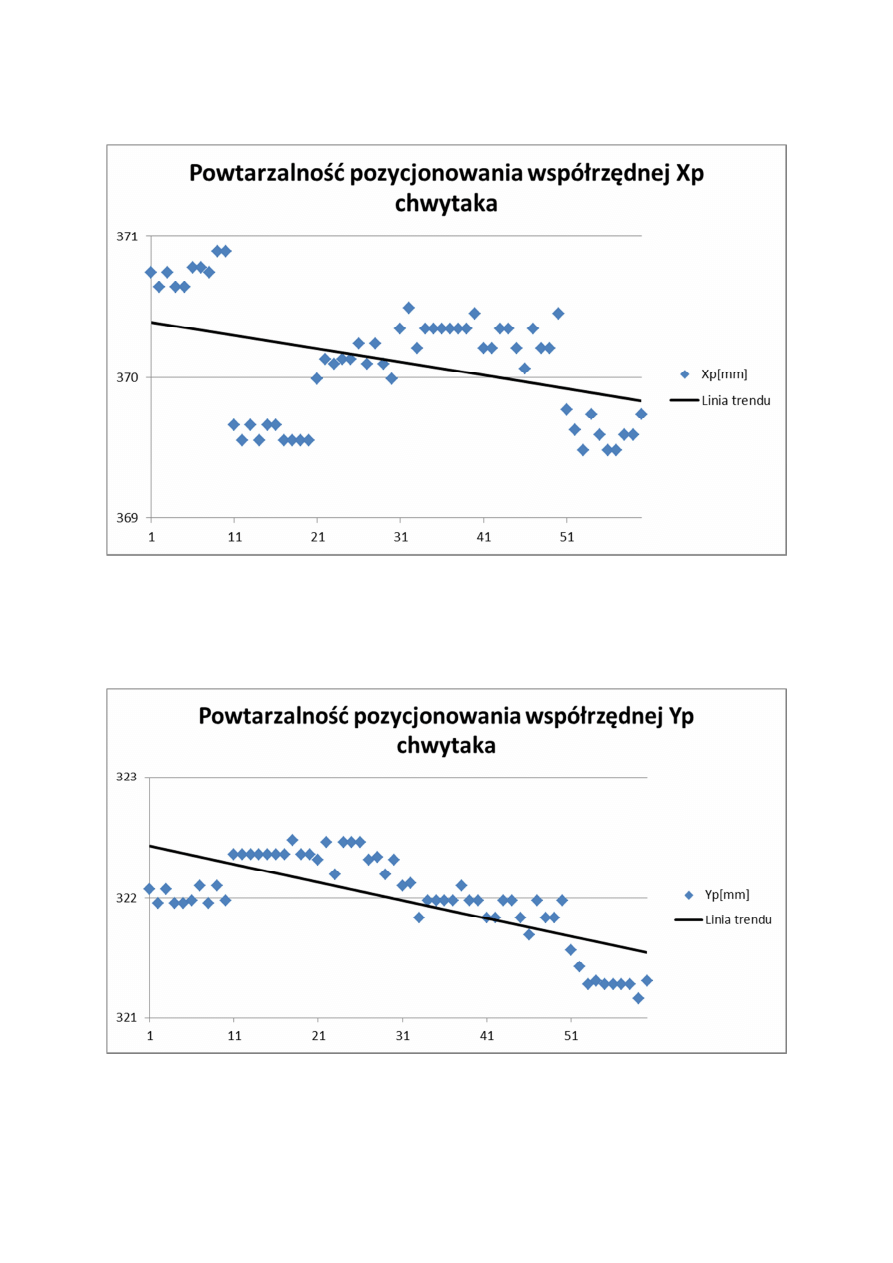
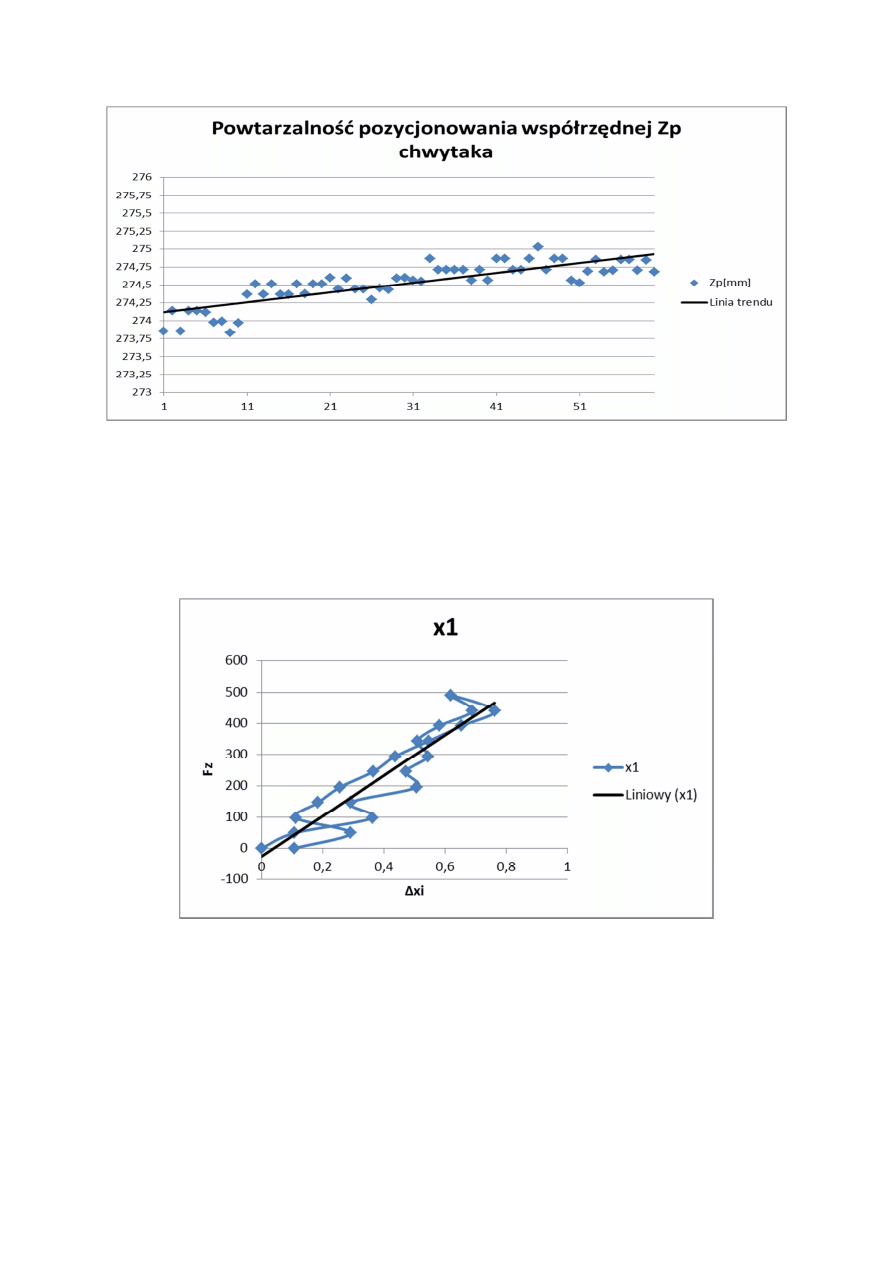
c) powtarzalność pozycjonowania manipulatora
( = )
*
+,
-
(
+
− )
.
Gdzie:
( − /01ℎ 3.43 56!0!70/83
. − 4 /ść !7!;367ó8
+
− 8!76/ś14 /5 1 3=ó . 1ℎ !7!;367ó8
− ś730.4! 85 56>41ℎ /;4!7ó8
4. Wyznaczenie sztywności statycznej manipulatora szeregowego 6R z wykorzystaniem
czujników linkowych
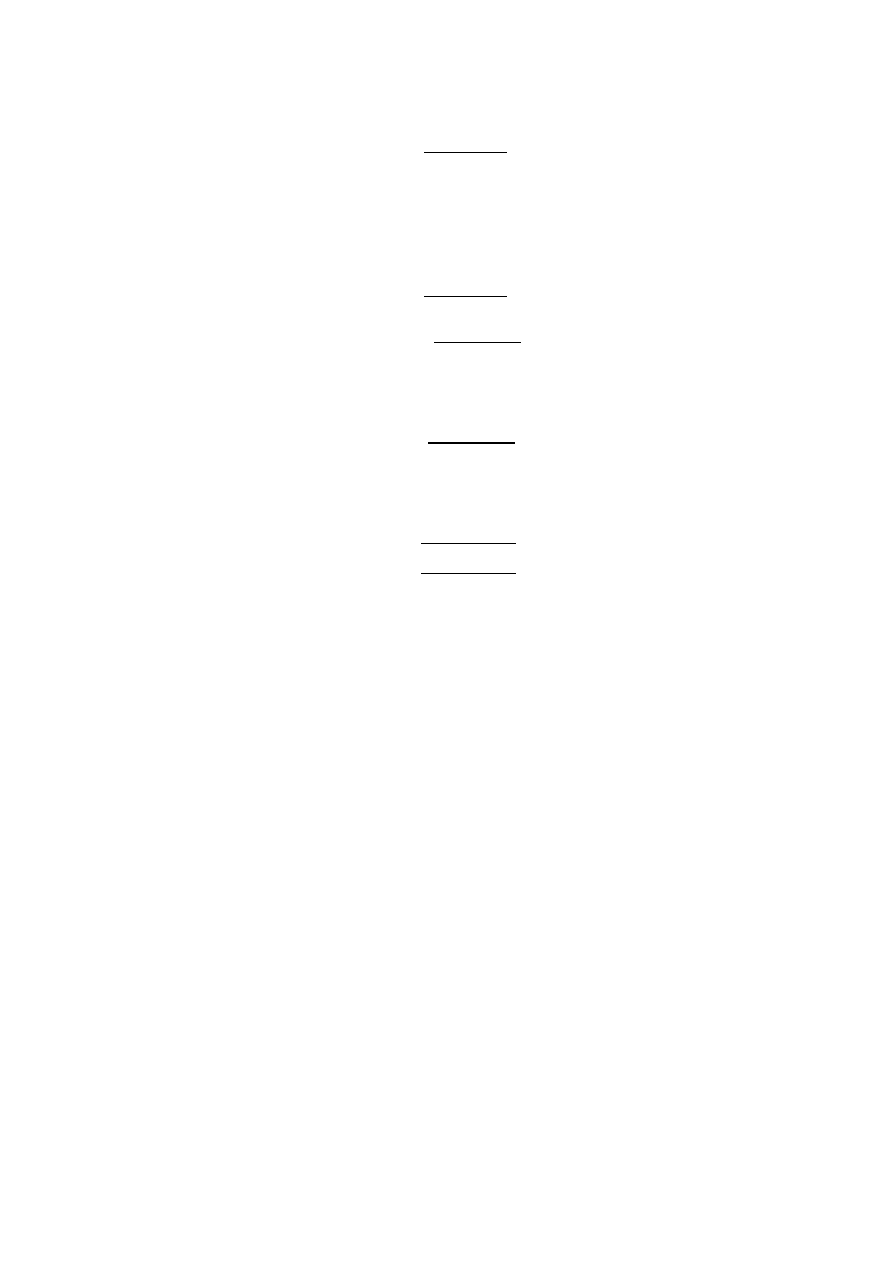
a) Stanowisko pomiarowe
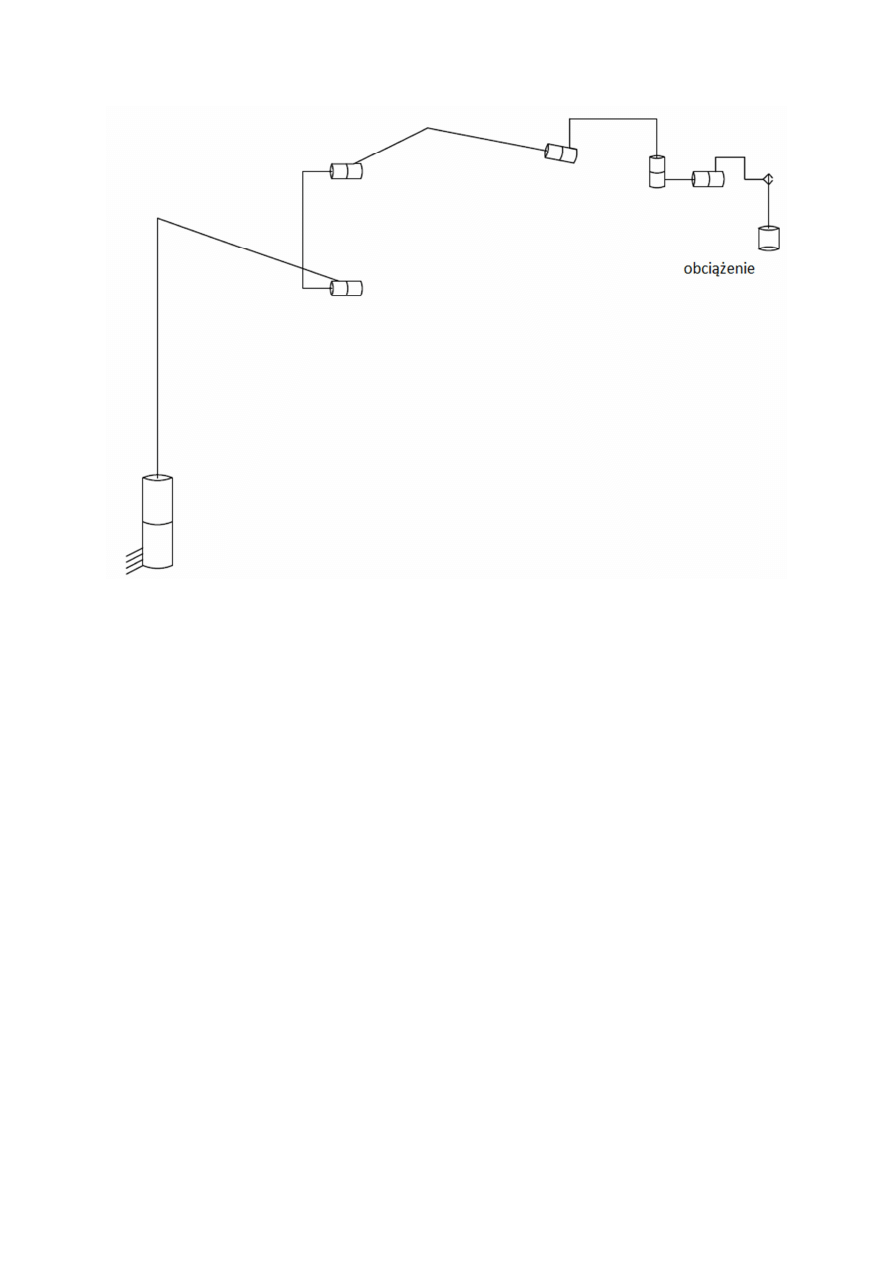
b) Macierz sztywności
Macierz sztywności manipulatora o strukturze szeregowej przedstawia się jako:
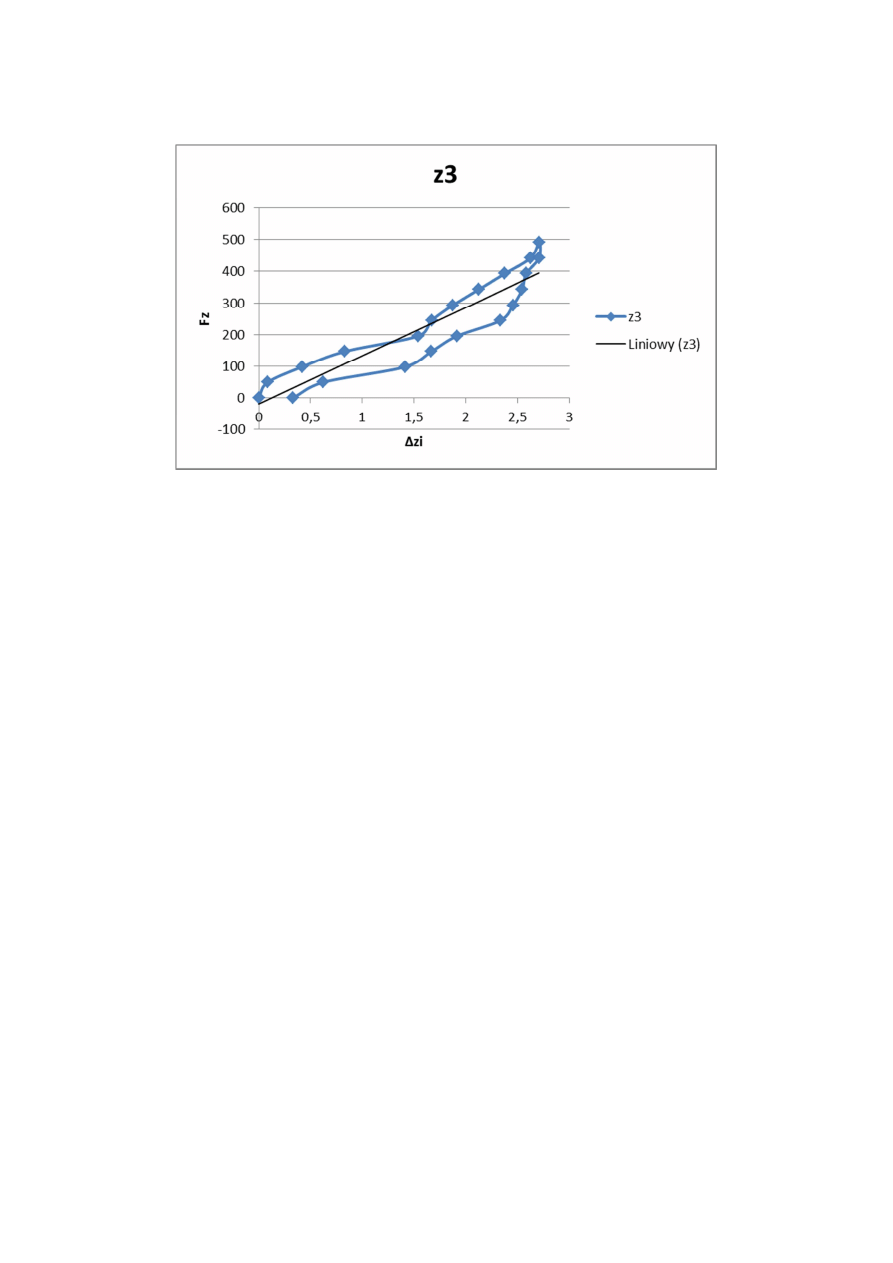
Ze względu na obciążenie siłą pionową Fz, rozważano tylko liniowe zależności
przemieszczenia członu roboczego od siły, czyli następujące elementy macierzy K: k13, k23 i
k33
d) Wykonanie pomiaru i analiza wyników
Współrz
ę
dne kartezja
ń
skie
X [mm]
Y [mm]
Z [mm]
w [
o
]
p [
o
]
r [
o
]
-118,535
-2157,439
396,439
-94,042
77,792
175,113
Współrz
ę
dne konfiguracyjne
θ
i
[
o
], i = 1, …, 6
1
2
3
4
5
6
-93,445
24,364
-30,156
185,120
-23,396
187,752
Współrz
ę
dne kartezja
ń
skie
X [mm]
Y [mm]
Z [mm]
w [
o
]
p [
o
]
r [
o
]
-118,535
-2157,439
396,439
-94,042
77,792
175,113
Współrz
ę
dne konfiguracyjne
θ
i
[
o
], i = 1, …, 6
1
2
3
4
5
6
-94,250
7,044
-35,229
185,864
-34,501
187,389
Współrz
ę
dne kartezja
ń
skie
X [mm]
Y [mm]
Z [mm]
w [
o
]
p [
o
]
r [
o
]
-118,535
-2157,439
396,439
-94,042
77,792
175,113
Współrz
ę
dne konfiguracyjne
θ
i
[
o
], i = 1, …, 6
1
2
3
4
5
6
-93,291
33,998
-24,810
185,780
-24,053
186,930
Nr
pomiaru
L1[V]
L2[V]
L3[V]
L1[mm]
L2[mm]
L3[mm]
najazd
1
4,659
5,623
4,232
465,9
562,3
423,2 x+
2
4,66
5,623
4,233
466
562,3
423,3 x+
3
4,659
5,623
4,232
465,9
562,3
423,2 x+
4
4,66
5,623
4,233
466
562,3
423,3 x+
5
4,66
5,623
4,233
466
562,3
423,3 x+
6
4,661
5,624
4,233
466,1
562,4
423,3 x+
7
4,66
5,624
4,233
466
562,4
423,3 x+
8
4,66
5,623
4,232
466
562,3
423,2 x+
9
4,66
5,624
4,232
466
562,4
423,2 x+
10
4,661
5,624
4,232
466,1
562,4
423,2 x+
11
4,653
5,62
4,238
465,3
562
423,8 x-
12
4,653
5,62
4,239
465,3
562
423,9 x-
13
4,653
5,62
4,238
465,3
562
423,8 x-
14
4,653
5,62
4,239
465,3
562
423,9 x-
15
4,653
5,62
4,238
465,3
562
423,8 x-
16
4,653
5,62
4,238
465,3
562
423,8 x-
17
4,653
5,62
4,239
465,3
562
423,9 x-
18
4,652
5,62
4,239
465,2
562
423,9 x-
19
4,653
5,62
4,239
465,3
562
423,9 x-
20
4,653
5,62
4,239
465,3
562
423,9 x-
21
4,657
5,623
4,239
465,7
562,3
423,9 y+
22
4,657
5,624
4,239
465,7
562,4
423,9 y+
23
4,658
5,623
4,238
465,8
562,3
423,8 y+
24
4,657
5,624
4,239
465,7
562,4
423,9 y+
25
4,657
5,624
4,239
465,7
562,4
423,9 y+
26
4,657
5,624
4,238
465,7
562,4
423,8 y+
27
4,657
5,623
4,238
465,7
562,3
423,8 y+
28
4,658
5,624
4,238
465,8
562,4
423,8 y+
29
4,658
5,623
4,238
465,8
562,3
423,8 y+
30
4,657
5,623
4,239
465,7
562,3
423,9 y+
31
4,66
5,624
4,237
466
562,4
423,7 y-
32
4,661
5,625
4,237
466,1
562,5
423,7 y-
33
4,661
5,623
4,237
466,1
562,3
423,7 y-
34
4,661
5,624
4,237
466,1
562,4
423,7 y-
35
4,661
5,624
4,237
466,1
562,4
423,7 y-
36
4,661
5,625
4,237
466,1
562,4
423,7 y-
37
4,661
5,624
4,237
466,1
562,4
423,7 y-
38
4,66
5,624
4,237
466
562,4
423,7 y-
39
4,661
5,624
4,237
466,1
562,4
423,7 y-
40
4,661
5,624
4,236
466,1
562,4
423,6 y-
41
4,661
5,623
4,237
466,1
562,3
423,7 z+
42
4,661
5,623
4,237
466,1
562,3
423,7 z+
43
4,661
5,624
4,237
466,1
562,4
423,7 z+
44
4,661
5,624
4,237
466,1
562,4
423,7 z+
45
4,661
5,623
4,237
466,1
562,3
423,7 z+
46
4,661
5,622
4,237
466,1
562,2
423,7 z+
47
4,661
5,624
4,237
466,1
562,4
423,7 z+
48
4,661
5,623
4,237
466,1
562,3
423,7 z+
49
4,661
5,623
4,237
466,1
562,3
423,7 z+
50
4,661
5,624
4,236
466,1
562,4
423,6 z+
51
4,656
5,617
4,233
465,6
561,7
423,3 z-
52
4,656
5,616
4,233
465,6
561,6
423,3 z-
53
4,656
5,615
4,233
465,6
561,5
423,3 z-
54
4,657
5,616
4,232
465,7
561,6
423,2 z-
55
4,656
5,615
4,232
465,6
561,5
423,2 z-
56
4,656
5,615
4,233
465,6
561,5
423,3 z-
57
4,656
5,615
4,233
465,6
561,5
423,3 z-
58
4,656
5,615
4,232
465,6
561,5
423,2 z-
59
4,657
5,615
4,232
465,7
561,5
423,2 z-
60
4,657
5,616
4,232
465,7
561,6
423,2 z-
i
Xp
Yp
Zp
1
370,748
322,075
273,853
2
370,639
321,956
274,140
3
370,748
322,075
273,853
4
370,639
321,956
274,140
5
370,639
321,956
274,140
6
370,783
321,980
274,121
7
370,783
322,100
273,981
8
370,748
321,956
273,993
9
370,892
322,100
273,834
10
370,892
321,980
273,974
11
369,664
322,359
274,368
12
369,555
322,359
274,514
13
369,664
322,359
274,368
14
369,555
322,359
274,514
15
369,664
322,359
274,368
16
369,664
322,359
274,368
17
369,555
322,359
274,514
18
369,555
322,478
274,374
19
369,555
322,359
274,514
20
369,555
322,359
274,514
21
369,987
322,314
274,599
22
370,131
322,458
274,440
23
370,096
322,194
274,592
24
370,131
322,458
274,440
25
370,131
322,458
274,440
26
370,240
322,458
274,293
27
370,096
322,314
274,452
28
370,240
322,339
274,434
29
370,096
322,194
274,592
30
369,987
322,314
274,599
31
370,349
322,100
274,567
32
370,493
322,124
274,549
33
370,205
321,836
274,866
34
370,349
321,980
274,708
35
370,349
321,980
274,708
36
370,349
321,980
274,708
37
370,349
321,980
274,708
38
370,349
322,100
274,567
39
370,349
321,980
274,708
40
370,457
321,980
274,561
41
370,205
321,836
274,866
42
370,205
321,836
274,866
43
370,349
321,980
274,708
44
370,349
321,980
274,708
45
370,205
321,836
274,866
46
370,060
321,692
275,024
47
370,349
321,980
274,708
48
370,205
321,836
274,866
49
370,205
321,836
274,866
50
370,457
321,980
274,561
51
369,774
321,569
274,531
52
369,630
321,425
274,689
53
369,486
321,281
274,847
54
369,739
321,305
274,683
55
369,595
321,281
274,701
56
369,486
321,281
274,847
57
369,486
321,281
274,847
58
369,595
321,281
274,701
59
369,595
321,161
274,841
60
369,739
321,305
274,683
ś
rednia
370,12
321,99
274,52
σ
0,41
0,36
0,28
2
σ
0,83
0,72
0,57
3
σ
1,24
1,07
0,85
4. Wyznaczenie sztywności statycznej manipulatora szeregowego 6R z wykorzystaniem czujników
linkowych
g) Wykonanie pomiaru
pomiar pierwszy:
Pomiar drugi:
Pomiar trzeci:
5. Wnioski
a) Pomiar powtarzalności pozycjonowania manipulatora.
Według producenta powtarzalność manipulatora powinna nie być mniejsza niż 50 %
w naszym wypadku odpowiednio dla osi x, y, z otrzymaliśmy 83%, 72% , 57%. Wynika z tego, że nasz
manipulator jest ma wyskoki współczynnik powtarzalności pozycjonowania. Dlatego może być na
przykład stosowany w przemyśle motoryzacyjnym jako robot spawający czy nakładający różnego
rodzaju uszczelniacze na części karoserii samochodowej.
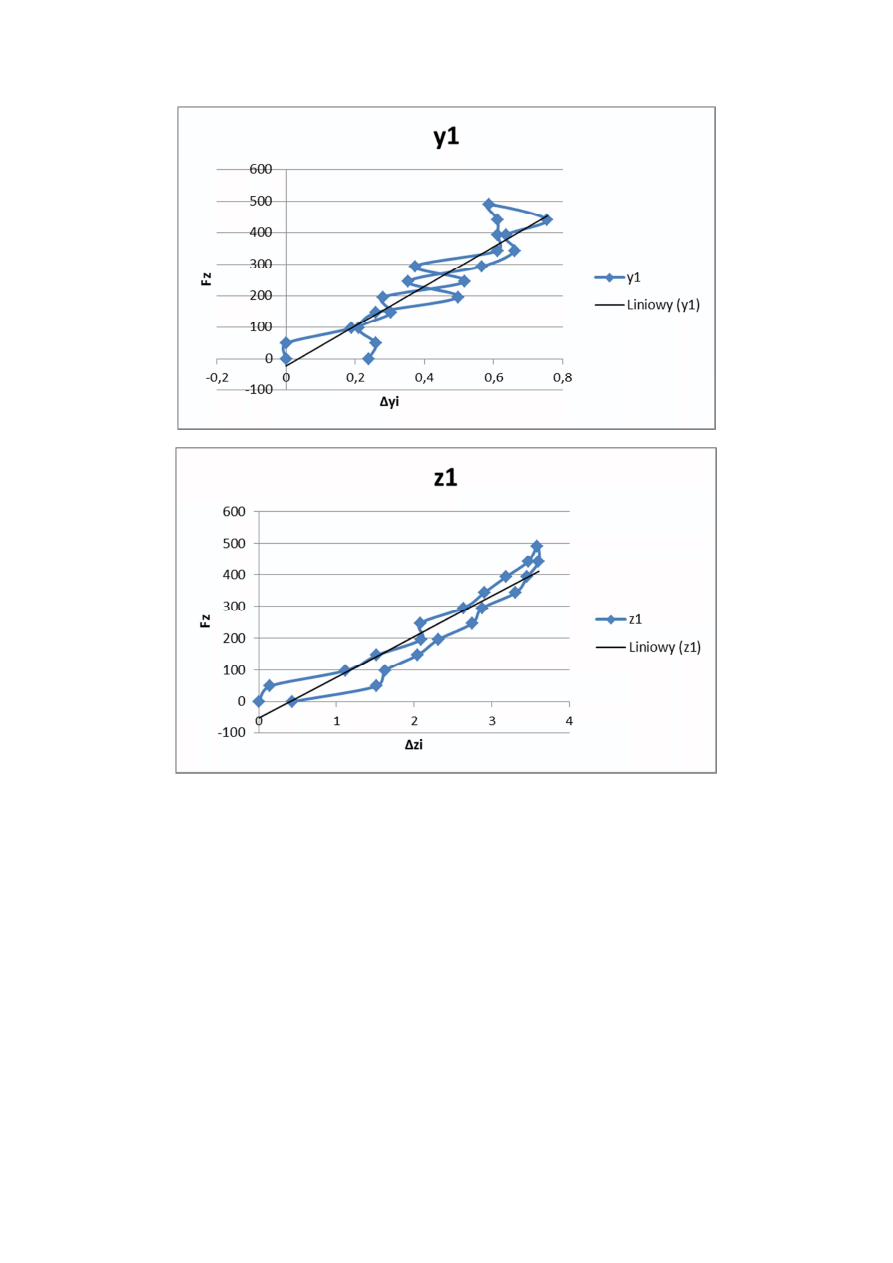
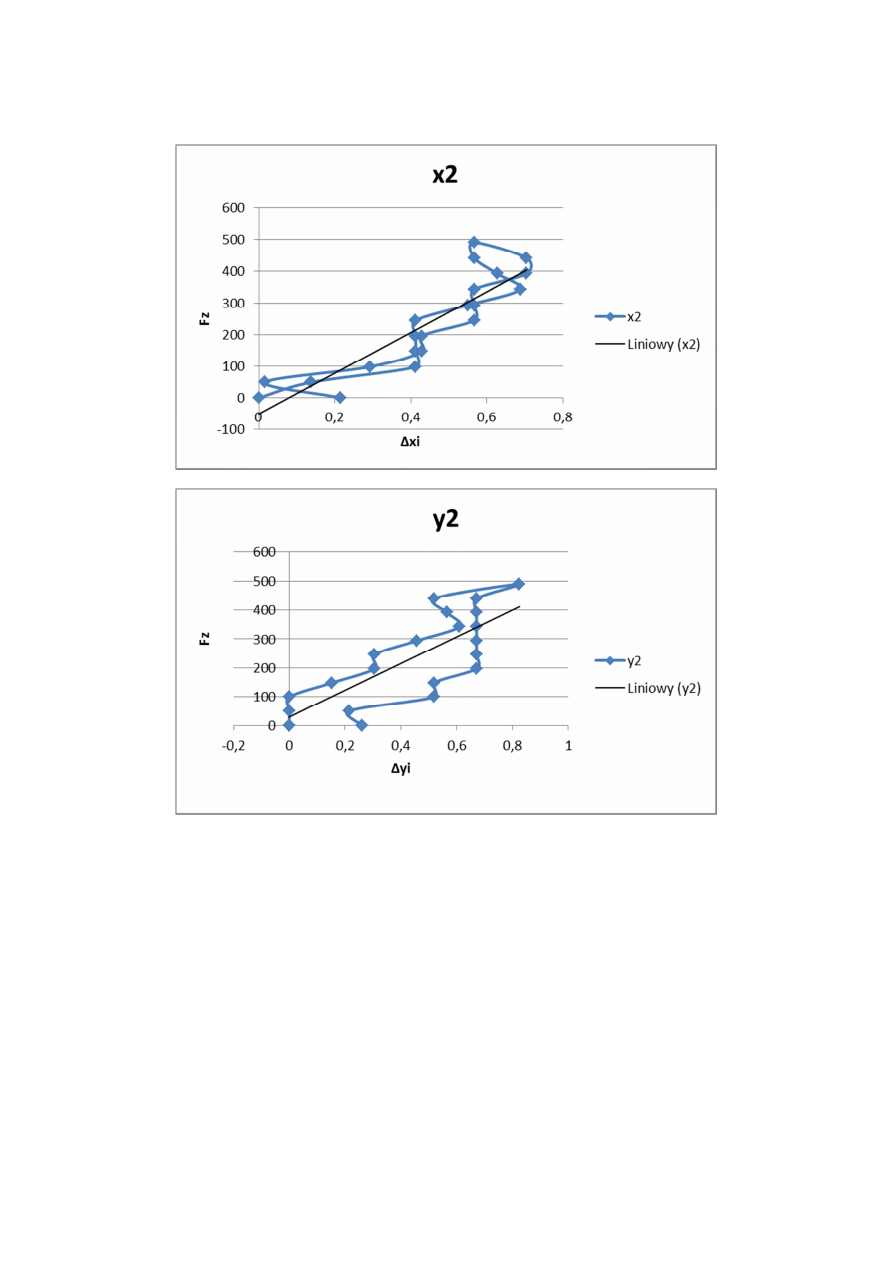
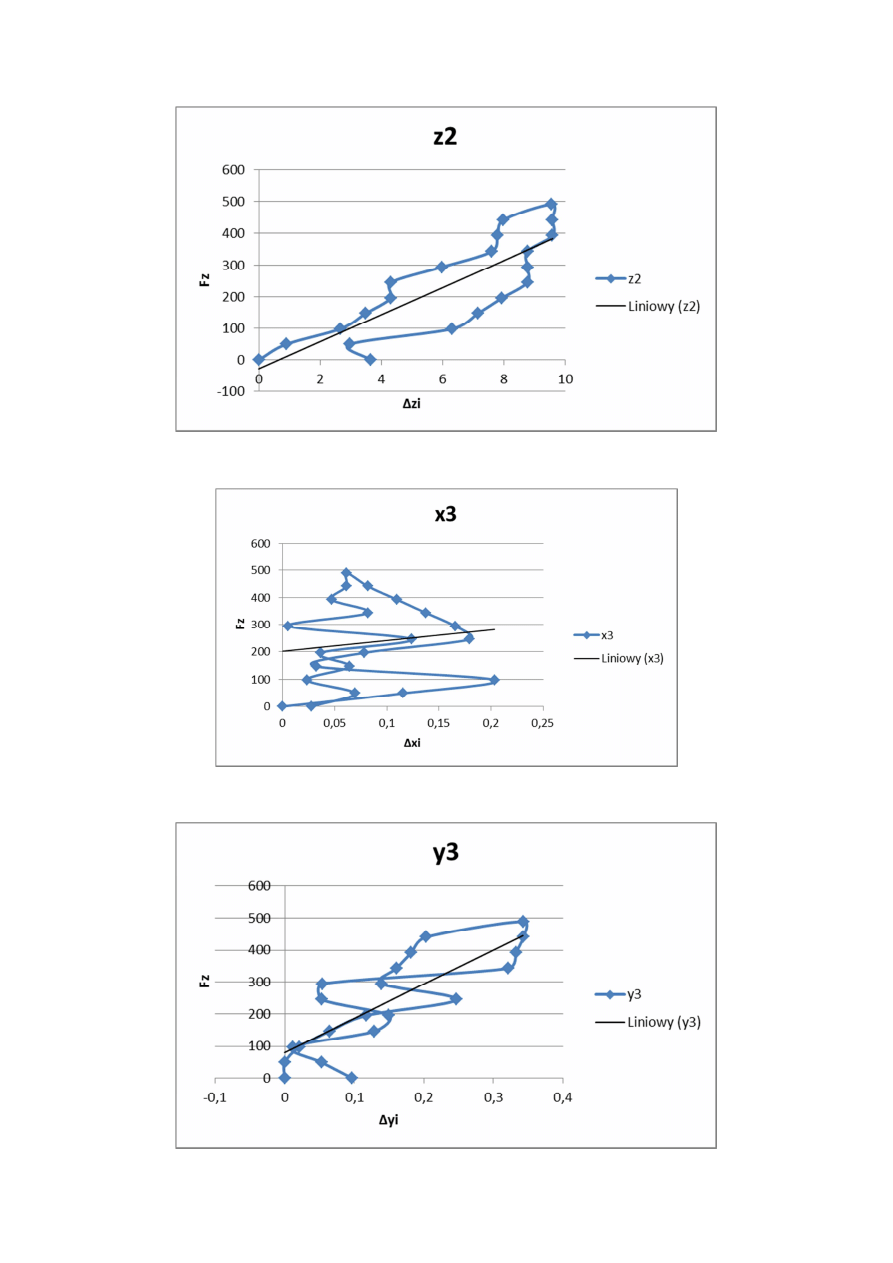
b) Pomiar sztywności manipulatora.
Sztywność manipulatora wpływa również na dokładność jego pracy. Podczas
badania sztywności przyjmowaliśmy pozycję nieobciążonego manipulatora za poziom zerowy. Po
dokonaniu tego badania możemy dojść do wniosków, że precyzja manipulatora jest wprost
proporcjonalna do jego sztywności. Współczynnik sztywności możemy wykorzystywać podczas
programowania robota. Po to aby określić dokładnie jego pozycję roboczą.
Wyszukiwarka
Podobne podstrony:
gora mmnasze22
ZAPROSZENIE, Documents, IP Zielona gora, mat inf
góra 2 wn
Ceny biletów kolejowych dla studentów na trasie Jelenia Góra Wrocław Główny
05 ZBROJENIE PŁYTY STROPOWEJ GÓRĄ NA POZIOMIE 3,38 m
zlozeniowka gora zakryta ccc id Nieznany
Ceny biletów kolejowych dla uczniów na trasie Jelenia Góra Poznań Główny
koleje-pyt egz, Budownictwo UZ Zielona Góra, Budownictwo kolejowe
PROPOZYCJA SPOSOBU PROWADZENIA SPOTKANIA Z MŁODZIEŻĄ, Documents, IP Zielona gora, Wspólnota AA
Święta góra Omine w paśmie Kii w Japonii
Konspekt dla kl V GÓRA TABOR
04 Górą i dołem
Góra Słownik motywów
Góra i dół
Wymiarowanie słupów sym (góra,dół)
więcej podobnych podstron