Department of Robotics and
Mechatronics
Vision Systems
Subject: Lab1_ Introduction to Rapid Prototyping and frame-grabber card
programming using DS1003 board with signal processor.
Main objective of this exercise is to acquaint with: rapid prototyping technology,
frame grabber card cooperating with DS1003 board equipped with signal processor
and to make skilled at programming basic image pre-processing algorithms.
Lecturer: dr inż. Piotr KOHUT
Group:
Name and Surname:
Date:
Comments:
1. The purpose of exercise
Main objective of this exercise is to acquaint with: rapid prototyping technology,
frame grabber card cooperating with DS1003 board equipped with signal processor
and to make skilled at programming basic image pre-processing algorithms.
The great advantage of rapid prototyping control system with using vision
information is applying signal processor with large design power and automatic
programming. The automatic built process is composed of generating controller
code, in C language, directly from Simulink block diagram and automatic
compilation, linking and object file downloading to processor memory in real time.
Automatic code generation and direct DSP access with Matlab are key features of the
rapid prototyping. This solution allows creation of new control algorithms very easy
and fast. They are implemented and tested, in the same way, before the physical
prototype of control system will be built. The coupling of hardware-software
programming environment Matlab/Simulink/dSPACE makes possible to iteratilly
testing of the obtained application
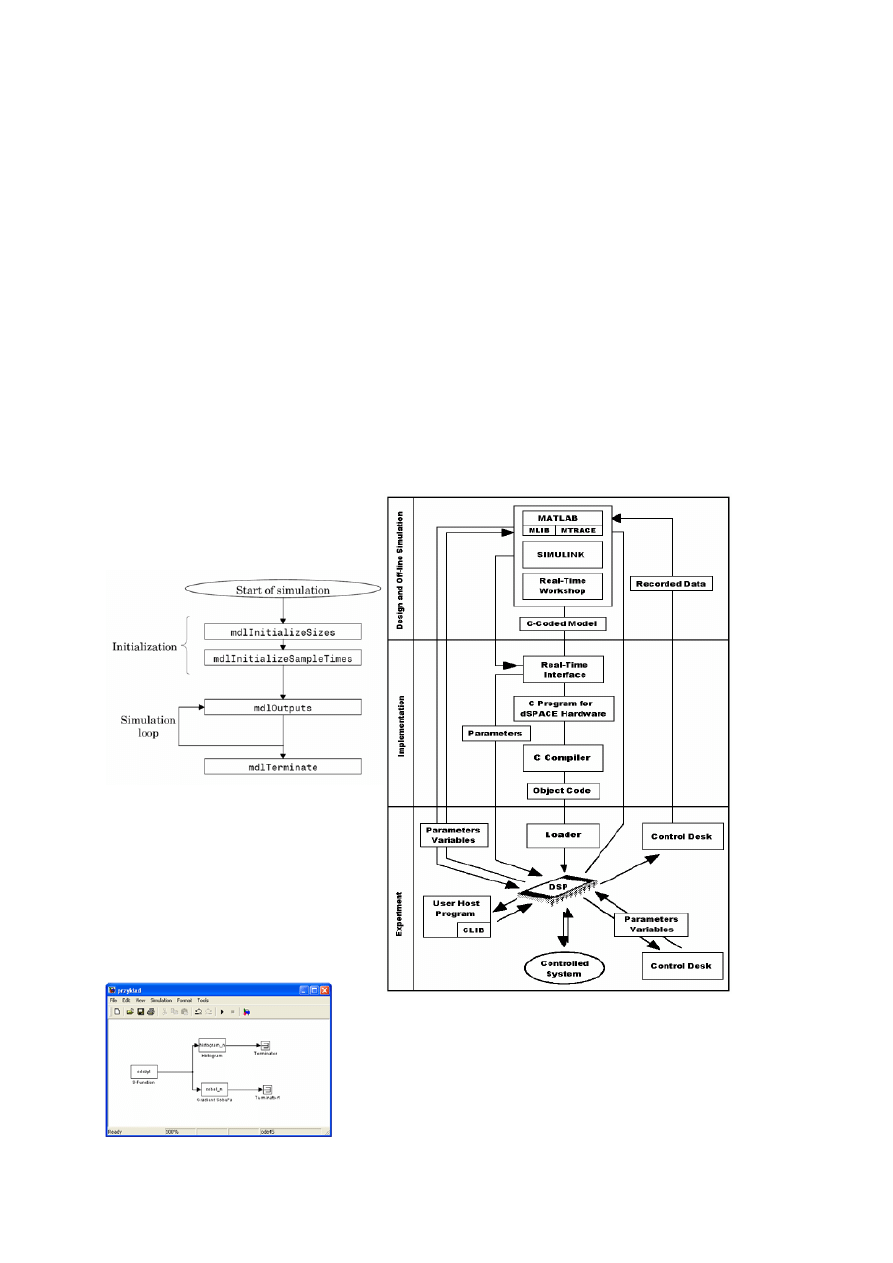
All procedures (image pre-processing and frame-
grabber programming) are written as Simulink S-
function in C language. An S-function is a computer
language description of a dynamic system, and allows
to add algorithms to Simulink models. C language S-
functions are compiled as MEX-files and are
dynamically linked into Matlab when needed. S-
functions are incorporated into Simulink models by

using the S-Function block in the Nonlinear Block sublibrary. Such block provides
access to S-functions from a block diagram . An advantage of using S-functions is
possibility to build a general purpose block, which can be used many times in a
model, varying parameters with each instance of the block.
The dSPACE Real-Time Interface (RTI) connects The MATLAB, SIMULINK, and Real-
Time Workshop (RTW) with dSPACE´s real-time system to form an integrated ready-
to-use development enviroment for real-time applications. It provides for an
automatic and seamless implementation of SIMULINK graphical models on dSPACE
real-time hardware systems for hardware-in-the-loop simulation and controller
prototyping. Any kind of SIMULINK model for wich code can be generated by means
of the RTW can be implemented by the RTI, including continuous-time, discret-time,
and hybrid systems. With the additional MATLAB DSP blockset also digital signal
processing, and frequency domain applications can run in the RTI environment.
2.
Exercises (Read instruction: Lab1_RapidProtot_Build.pdf)
Develop real time application and work out in the form of report each consecutive steps during
building real time application:
1. Draw scheme and describe the laboratory stand (camera, frame-grabber, DS1003 board,
stress and explain interfaces between hardware, which modules communicate by ISA
and which by PHS bus).
2. Work out in details each consecutive steps during building real time application.
3. Develop S-function C-MEX and explain how C language S-functions are compiled as
MEX-files and are dynamically linked into Matlab when needed.
4. Describe meaning RTW, RTI, MLIB modules.
5. Describe the meaning of each S-function mdl <> model function.
6. Describe and explain in details contents of mdlOutput.
7. Describe procedures of image pre-processing and register settings for frame-grabber
programming
8. Describe and explain in details implemented S-functions in C language, describe used
data type.
9.
Illustrate example of using ControlDesk (virtual instrument panel that enables you to
change parameters and monitor signals) and explain how to create simple application
(step-by-step)
10.
From Matlab to all variables and parameters in DSP by MLIB access is possible.
Describe MLIB function and m-files allowing for this communication
Wyszukiwarka
Podobne podstrony:
25 en id 31087 Nieznany (2)
Lab5 Modelowanie dynamiki id 25 Nieznany
Active Listening en id 51008 Nieznany (2)
BPMN2 0 Poster EN id 92566 Nieznany (2)
mizan Z2 MECH EN id 778695 Nieznany
Agenda en id 52847 Nieznany (2)
55 en id 41488 Nieznany
cat 6AD en id 108772 Nieznany
iecp en id 209519 Nieznany
KRYTYKA LITERACKAwpigulce id 25 Nieznany
kurs ZERO OSN wiczenie 03 id 25 Nieznany
26 en id 31374 Nieznany (2)
KS SF 12 006 EN id 252123 Nieznany
LAB1 MES MATLAB statyka 1 id 25 Nieznany
Makros powerPLmC E30 en id 1627 Nieznany
iteiit21v9n1 en id 220860 Nieznany
DVP rtu 485 manual en id 144512 Nieznany
Dyrektywa PED 97 23 CE EN id 14 Nieznany
więcej podobnych podstron