Siłownik MEMS dla dysków HDD
Streszczenie-moving-slider microactuator wysokiej boisku toru HDD badano.Nowy projekt
zwany microactuator. microactuator bipolarny, który umożliwia zarówno wysoki skok i dobre
liniowość zostało zaproponowane. Dla ułatwienia montażu, nowy microactuator Technika
wytwarzania został opracowany, że umożliwia wiązanie wkładki na boku układu
microactuator.microactuator został zmontowany na serwer klasy HDD i servo przepustowość
8 kHz została wykazana z 80-kHz częstotliwości próbkowania. Indeks Warunki-Bipolar
siłownik, wysokiej przepustowości servo tracking, MEMS microactuator, pad klejenie
sidewall.
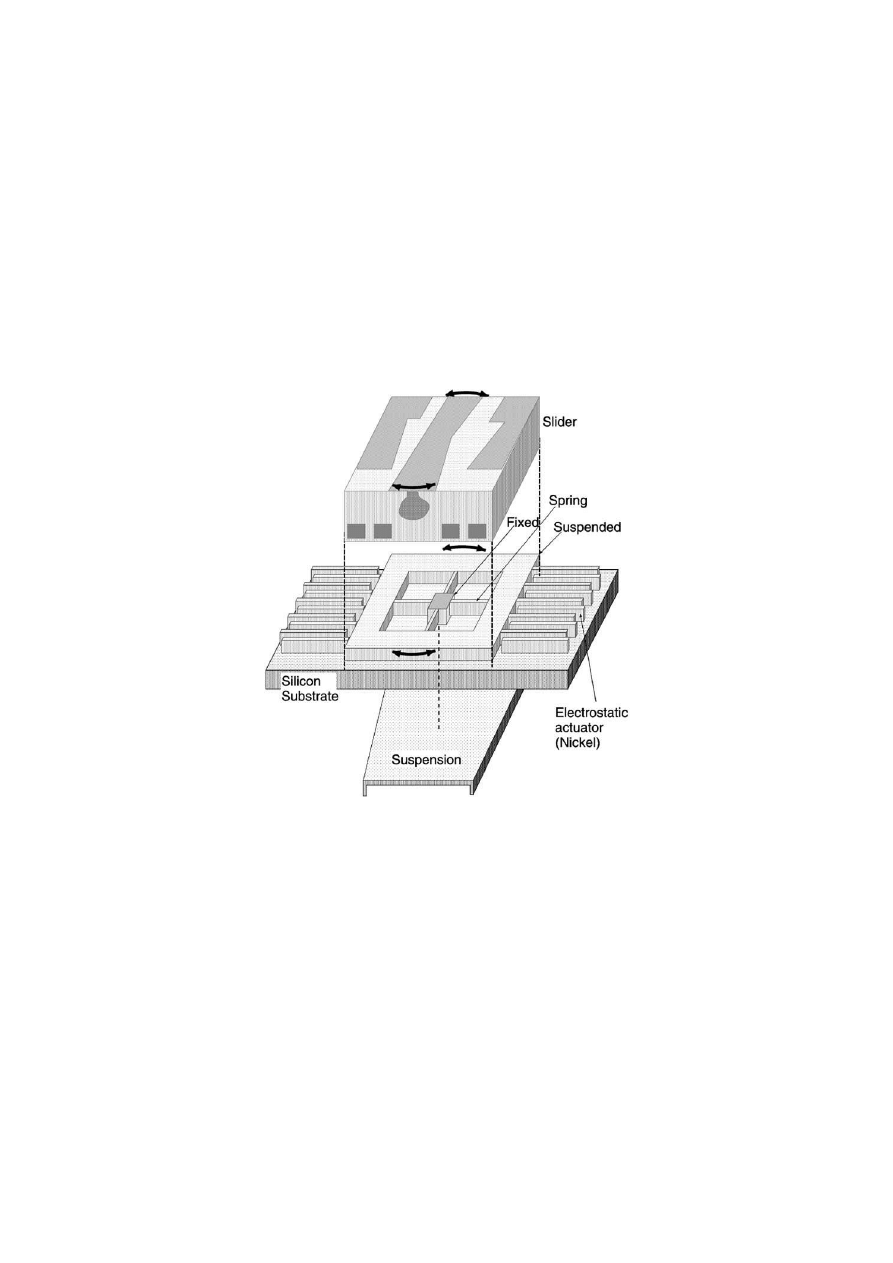
Rys 1. Schemat ruchomego suwaka microactuator.
I WPROWADZENIE
Aby śledzić dane gęstości dysków twardych dysków (HDD) wzrasta, Dokładność pozycja
głowy potrzeb magnetycznych należy poprawić odpowiednio. Jednym z najskuteczniejszych
sposobów poprawić dokładność pozycji jest zwiększanie śledzenia system serwo, którego
wydajność jest zwykle mierzona pasma servo. Do pasma servo z dyskami zostały poprawione
w ciągu ostatnich 20 lat, a ostatnich serwer klasy dysków twardych zazwyczaj serwo mają
przepustowość z 1-2 kHz. Jednak przewiduje się, że poprawa serwo staje się pasma wyzwanie
w przyszłości, jeśli prąd siłownika VCM jest używany, od mechanicznego rezonansu (zwykle
około VCM 7/5 kHz) ogranicza osiągalną przepustowość serwo. W celu poprawy servo
przepustowość dalej, dwustopniowe metoda siłownik był Proponowane, które składa się z
dwóch rodzajów napędów: jeden tradycyjny VCM, który działa jako gruba, niska prędkość,
ale duże-suwowy siłownika, natomiast inne siłownika (siłownik wtórny) jest przymocowane
na VCM, i działa jak dobrze, szybki, ale smallstroke siłownika. Istnieją dwa podstawowe
kandydatów na średnie Siłownik wykazano dotychczas: jest nazywany ruchu
metoda zawiesinowa, który ma umieszczony w dodatkowy siłownik. koniec ramienia
uruchamiającego, tak, że całe siłownika macha zawieszenie. Ponieważ napęd w tej
implementacji musi przenosić stosunkowo ciężkie masę zawiesiny (100 mg), Siłowniki, jak
napędy PZT [1], [2] są stosowane. Innym wtórnym kandydat siłownik zwany moving-slider
siłownik który znajduje się pomiędzy i suwak zawiesiny i porusza się w stosunku do suwaka
zawieszenia. Od siłownika i głowa są wspólnie położony, nie ma żadnych problemów
rezonansu. Tak więc, bardzo wysokie pasma servo można osiągnąć. Niniejszy artykuł
przedstawić wyniki ruchomego suwaka microactuator.
II. MEMS MOVING-SLIDER DESIGN SIŁOWNIK
Ponieważ microactuator jest stosowany jako część dysku, jest kilka unikalnych wymogów dla
siłownika, w tym produkcji siły wystarczająco wysoki, aby przesunąć ciało suwaka (2 mg)
przy wysokiej częstotliwości, Z duża sztywność, że może wytrzymać siłę ładunku
zastosowano suwaka z zawiesiny (20 mN), odporność dobry przed zewnętrznymi cząstek,
transmisja sygnału z suwaka do zawiesiny, i łatwy montaż z zawiesiny i suwak. Schemat
microactuator pokazano na rysunku. 1.microactuator pracuje jako obrotowej siłownika
obracającego suwak. Ponieważ głowica znajduje się na krawędzi suwaka, głowica przesuwa
poziomo (tracking kierunek).Ruch obrotowy jest realizowany przez spoke-jak struktury
wiosny. Jeden koniec jest dołączony do centralne stałe kotwicy i jest w załączniku do
zawieszonego ramki, że może obracać się w stosunku do podłoża przez elastyczność
sprężyny. Suwak jest przymocowany na górze tego zawieszone ramki.Elektrostatyczny
siłownik znajduje się w okolicach tej ramki, i napędza ramka w rotacji. Zatrudnia grzebień
napęd elektrostatyczny siłownika. Ponieważ siła suwaka ładowania stosuje z zawiesiny
suwaka, poprzez stosunkowo microactuator duża sztywność Ž. Jednakże microactuator musi
bardzo niska sztywność w płaszczyźnie, w celu uzyskania dużej udar. Aby spełnić te dwa
warunki, wysoki-aspect-ratio wiosna wykonane, którego typowy wymiar to 35 m wysokości i
3 m szerokości.Cały microactuator jest pokryta warstwą ochronną pokrywą. wykonane z niklu
galwanicznie (nie pokazany na rysunku), aby uzyskać dodatkowe niezawodność. Szczegóły
projektu microactuator zostały opisane w [3].
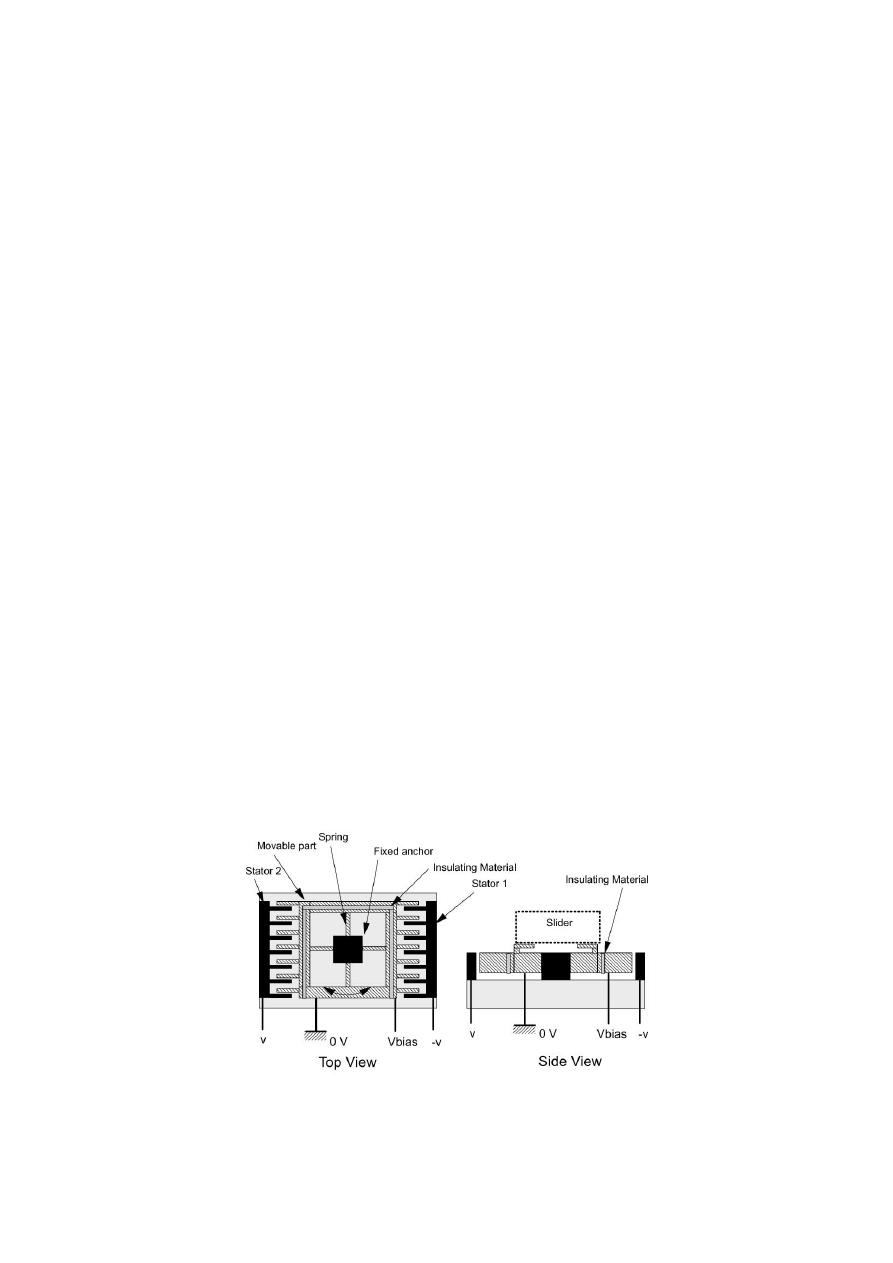
Rys.. 2. Microactuator dwubiegunowe.
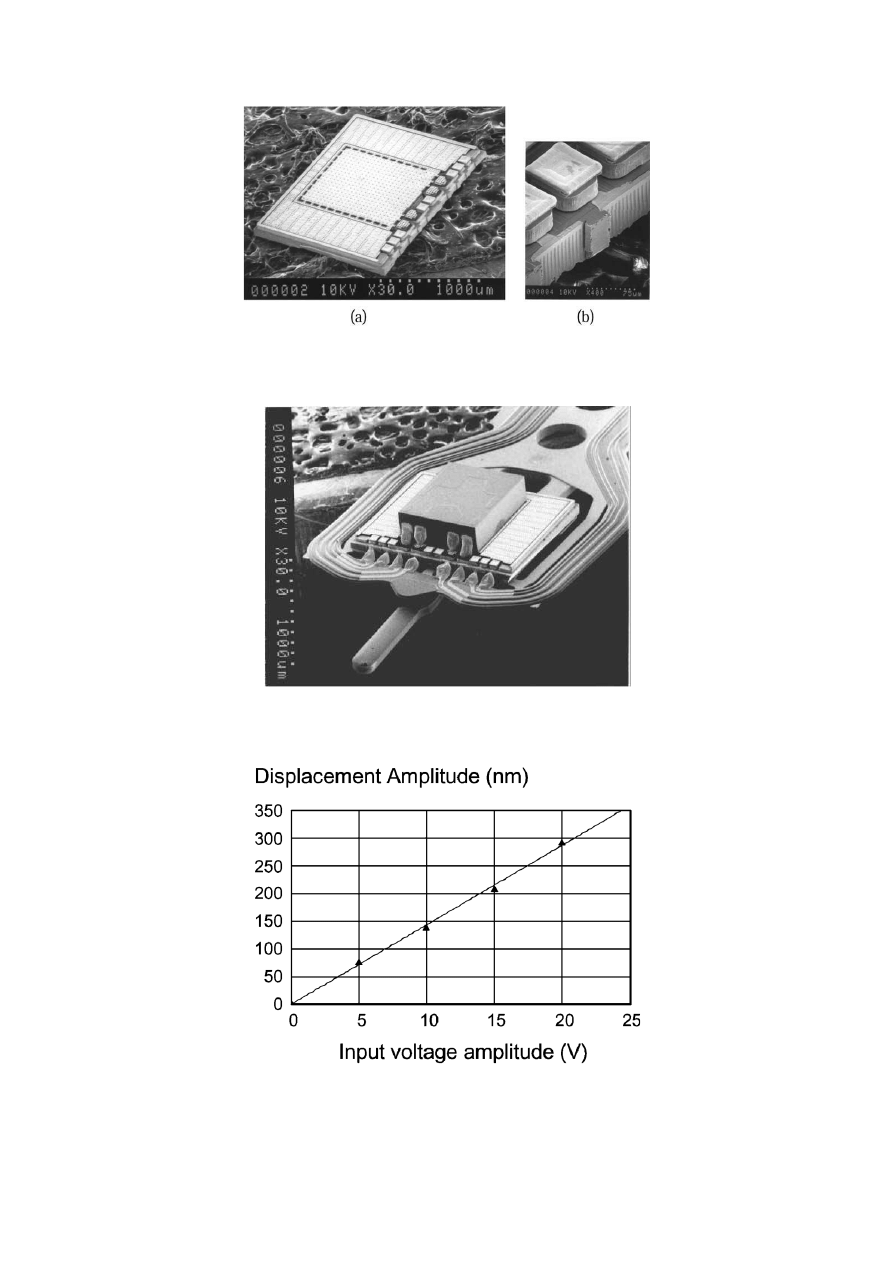
Rys.. 3. Fotografia SEM microactuator. (a) Widok ogólny. (b) Sidewall
pad klejenie.
Rys.. 4. Fotografia SEM microactuator zmontowanego z zawieszeniem i
suwak.
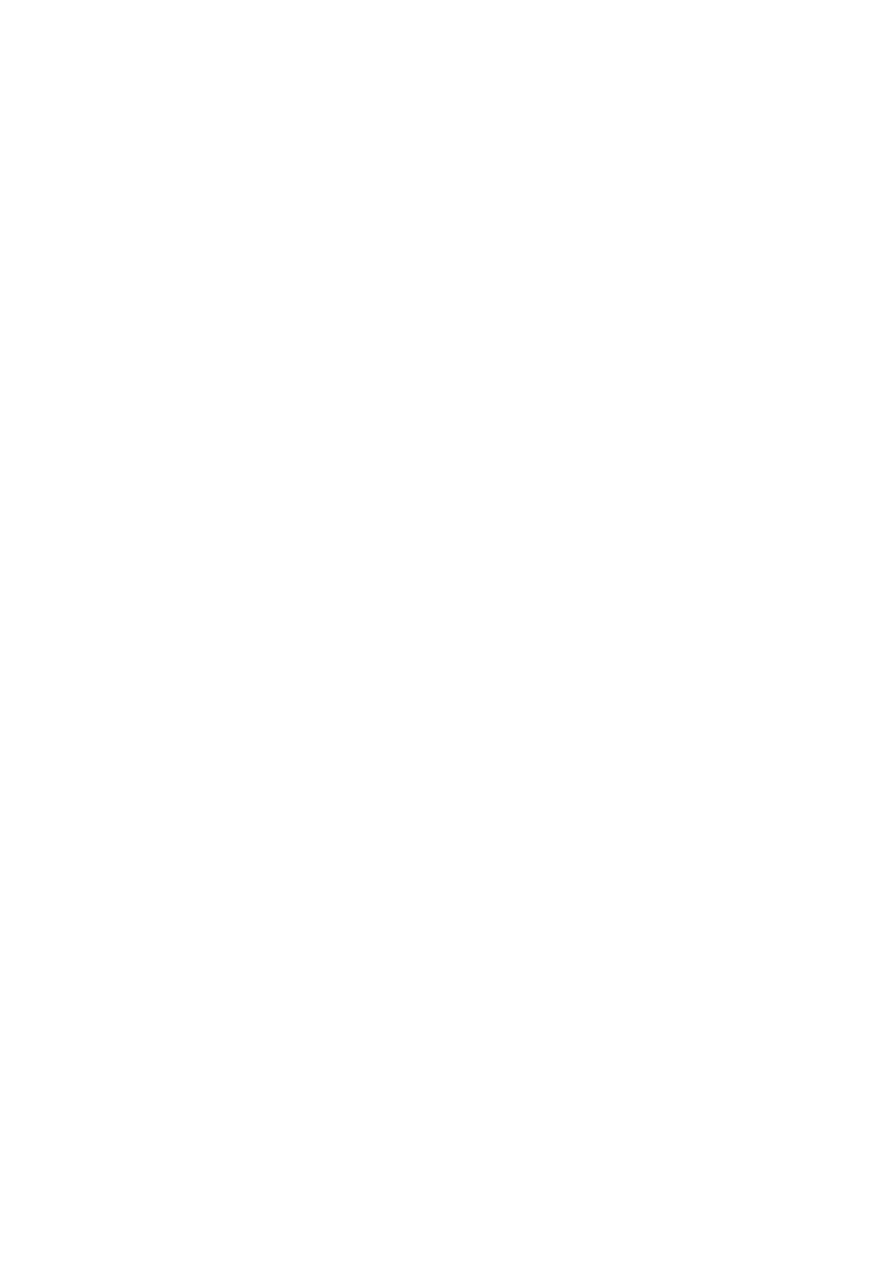
Rys.. 5. Napięcie wejściowe kontra wyporność (przy 1 kHz, 30-V DC bias).
A.
Microactuator Projektowanie Bipolar i sposób jazdy Wymagania dla napędu to
największa siła dla danego napięcia zasilania, liniowości zależności siły napięcie
wejściowe, a uziemienie suwak. Aby spełnić te wymagania, Nowy projekt
microactuator został opracowany, zwany microactuator dwubiegunowe. Problem
liniowości została omówiona wcześniej pracy, [4], ale jest to, że pierwszy dotyczy
microactuator problem z uziemieniem suwak. Konstrukcja i struktura przedstawia Rys..
2. Ruchoma część microactuator składa się z dwóch elektrycznie oddzielone, ale
mechanicznie części. Izolacyjne Materiał łączy te dwie części. Jedna strona jest, gdy
suwak jest zamocowane uziemione, i z drugiej strony jest siłownik Część, że ma
napięcie Bias stosowana. Dwa Stojan, stator 1 i 2, mają Stator jazdy napięć i ,
Odpowiednio. Microactuator jest elektrycznie modelowane jako dwa kondensatory.
Każdy kondensator pracuje jako napęd i generuje siły elektrostatyczne, gdy różnica
napięcia jest stosowany na kondensatorze. Jeden z dwóch kondensatorów w prawo
powoduje moment obrotowy i moment obrotowy w kierunku przeciwnym powoduje
inne. Moment netto jest różnica obu napędów. Elektrostatycznego Siła jest siłownik
proporcjonalny do kwadratu różnica napięcia przez kondensator. Zatem, moment
obrotowy netto wytwarzane przez siłownik Bipolar gdzie stałe. Jest proporcjonalne do
momentu obrotowego napięcia wejściowego Zamiast napięcia kwadratu. Siła
wyjściowa może być maksymalnie przy użyciu jednego skrajnego napięcia zasilającego
jak. Dla Przykładowo, gdy napięcie zasilania wynosi 30 V, można stosować 30 V i
zmienić jazdy napięcie od 30 V do 30 V. Dzięki temu maksymalna różnica napięcia 60
V. konwencjonalny microactuator wykorzystuje część ruchomą wykonaną z
pojedynczego kawałek metalu, tak że musi być utrzymywana na poziomie 0 V dla
suwaka uziemienia. W tym przypadku, jazdy napięcie 30 V do 30 V generuje dokładnie
ten sam moment obrotowy, i maksymalnego napięcia Różnica na siłowniku jest 30 V.
Nowa konstrukcja pozwala na Zastosowanie 30 do 30 V napięcia jazdy, dlatego nowe
Siłownik jest nazywany microactuator dwubiegunowe
B. Sidewall Bonding
Od microactuator montuje zawiesiną przy użyciu konwencjonalnej techniki montażu,
to jest pożądane, aby Klocki w microactuator w klejenie na jego bocznej ścianie.
Jednak Jest to wyzwanie, ponieważ ściana boczna jest pochowany w podłożu podczas
procesu produkcyjnego. Powieść technika proces był opracowali umożliwiający klocki
wiązania na boku urządzenia. Rys.. Figura 3 przedstawia fotografię SEM
microactuator o ścianie bocznej poduszki klejenie, i ryc. 4 pokazuje microactuator
zmontowane z zawiesiną i suwakiem. Suwak i microactuator Połączenie zostało
wykonane przez lutowania reflow kulowym.
III. EKSPERYMENT
Po pierwsze, w porównaniu do relacji napięcie wejściowe przemieszczenie było mierzone
przez LDV. W eksperymencie tym, napięcie polaryzacji V 30 zastosowano, a amplituda
microactuator 1 kHz mierzono dla różnych amplitud napięcia wejściowego.wynik wykazuje
dobrą liniowość. Pasmo częstotliwości microactuator mierzono oraz, że w porównaniu do z
jednostopniowej VCM. Rys.. 6 przedstawia Pasmo częstotliwości microactuator i VCM.
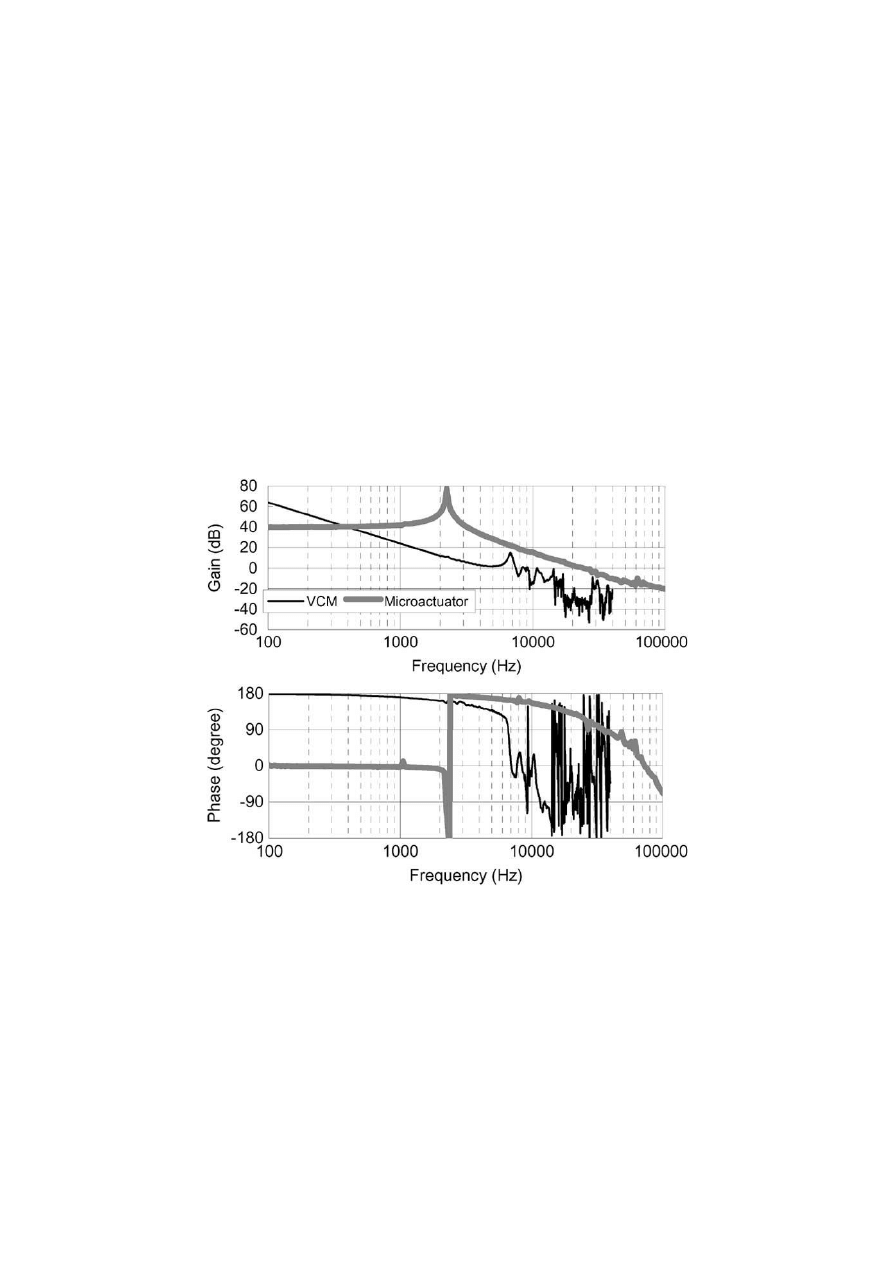
microactuator ma rezonansową pik przy 2,2 kHz, ze względu na jego sprężyny / masa Tryb,
ale może być łatwo szczytowa sterowany servo system. Po tym szczycie, wzmocnienia i fazy
microactuator są bardzo gładkie. Tak więc, korzystne jest, w przypadku wysokich servo
pasma. Z drugiej strony, ma pierwszy VCM szczyt około 7 kHz, a powyżej tej częstotliwości
wzmocnienia i fazy wykazują wiele szczytów i dolin w wyniku rezonansów mechanicznych
siłownika. Te tryby rezonansowe ograniczyć maksymalny osiągalny przepustowość VCM
systemu serwo. Ten microactuator montowano do 10 000 rpm serverclass HDD i występ był
badany. Rys.. 7 przedstawia otwartej pętli funkcja przeniesienia VCM-microactuator
dualstage serwo, w porównaniu z konwencjonalnym VCM jednostopniowej servo. Servo
przepustowość serwa dwustopniowe jest około 8 kHz, margines fazy 28 stopni i marginesu
zysk 5 dB.Częstotliwość próbkowania wynosi 80 kHz. Ponieważ maksymalna osiągalna
przepustowość była ograniczona przez częstotliwość próbkowania (nie przez mechanika),
Przepustowość może być łatwo powiększona dodatkowo jeśli badanie stawka wzrosła. Rys.. 8
przedstawia funkcję błędu odrzucenia. Servo microactuator może błędem odrzucającej przy
wyższym częstotliwości. Szczegóły eksperymentu serwo będzie przedstawione w [5].
Rys 6. Przeniesienie funkcji microactuator i VCM.
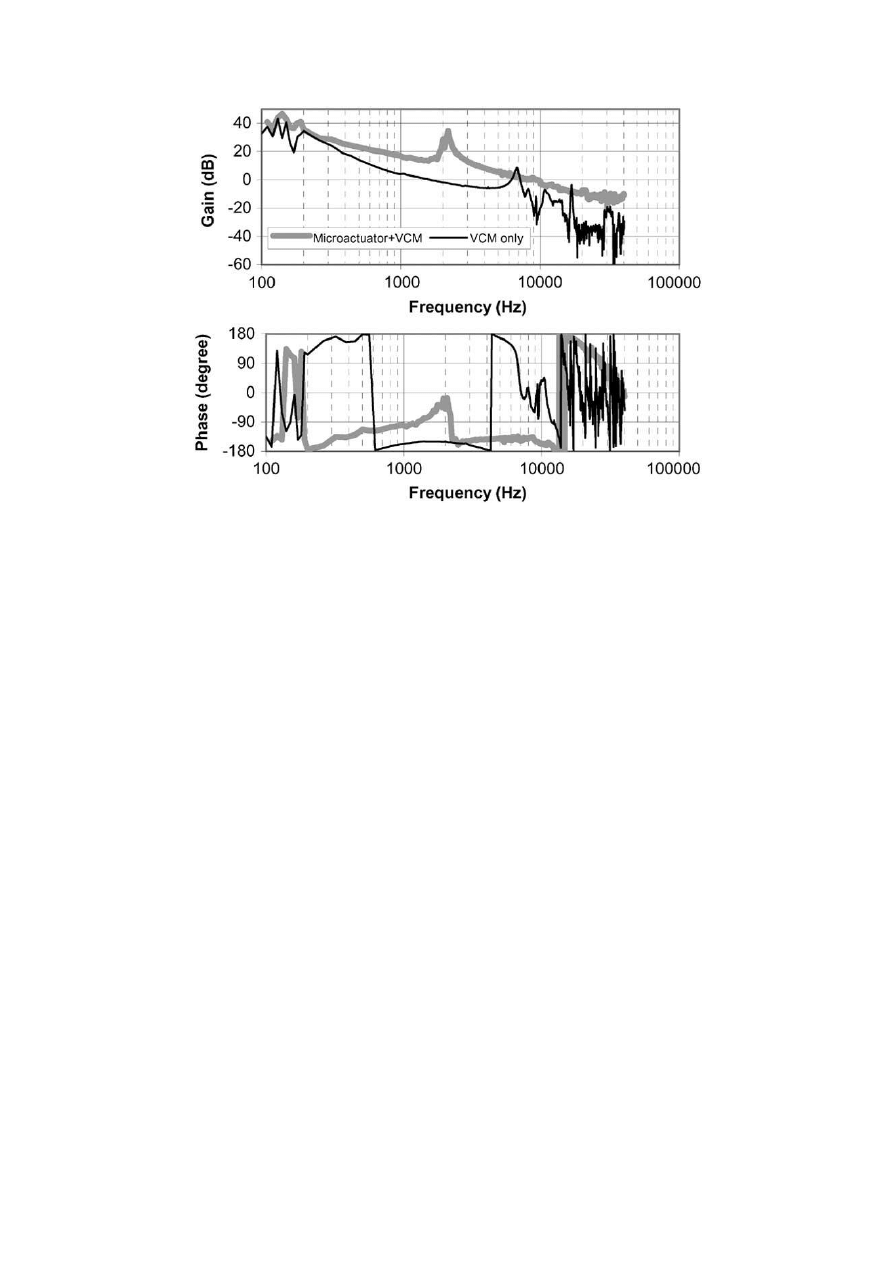
Rys.. 7. Open-loop funkcja przeniesienia microactuator i serwo VCM.
IV. WNIOSEK
W celu wzmocnienia pozycji głowicy HDD Serwo moving-slider microactuator
badano.Nowy projekt nazywa microactuator bipolarny został wyprodukowany i okazał
mieć dobrą liniowość. Dla ułatwienia montażu, łączenie ściany bocznej Proces pad został
opracowany.8-kHz servo było wykazana przez napęd poziomu doświadczenia. Tak więc, że
ta microactuator mogą wspierać wysoki skok kół przyszłości HDD.
Wyszukiwarka
Podobne podstrony:
Projekt Mechatronika?nczarek Brol
projektowanie mechatroniczne ESP
PROJEKTOWANIE MECHATRONICZNE, WYTYCZNE DOTYCZ
Projektowanie mechatroniczne, studia, elementy mechatroniki
projekt mechatroniki
Projekt Mechatronika?nczarek Brol
Mechatronika i projektowanie mechatroniczne
Projekt robota mobilnego szukającego wyjścia z labiryntu, MECHATRONIKA
TMM projekt, Studia Mechatronika, Semestr 4, TMM, Projekty
Projekt zaliczenie 2012, MECHATRONIKA, IV Semestr, Projektowanie Układów Elektronicznych
TMM - Projekt 6B(1), Mechatronika AGH IMIR, rok 2, TMM, 1A, 2A, 3A, 4B, 5B, 5A, 6A, 7B
Projekt TMM 1A(1), Mechatronika AGH IMIR, rok 2, sprawozdania, TMM, inne projekty, Projekt 1a
najlepsz wersja chyba, Studia Mechatronika, Semestr 4, TMM, Projekty
opracowanie zxagadnien, Mechatronika, Semestr IV, Zarządzanie Projektami i Procesami Technologicznym
Projektowanie układów sterowania w urządzeniach i systemach mechatronicznych u
TMM 3Aa, Mechatronika AGH IMIR, rok 2, TMM, 3a projekt TMM
więcej podobnych podstron