Zgodnie z numerem zadania i podanymi parametrami mechanizmu przyjęto jego wymiary i położenie jak na rysunku.
AB = 0,7m
BC = 0,9m
AS3=S3B = 0,35 m
V1=30m/s
1. Analiza strukturalna mechanizmu
1.1 Obliczenie ruchliwości mechanizmu
1.2 Podział mechanizmu na grupy strukturalne
n=2
p5=3
p4=0
![]()
Człony 2 i 3 tworzą grupę strukturalną klasy drugiej.
ANALIZOWANY MECHANIZM JEST MECHANIZMEM KLASY DRUGIEJ
2.1 Analiza kinematyczna mechanizmu - metoda grafoanalityczna (metoda planów)
Analiza prędkości
Prędkość punktu A VA=![]()
![]()
Podziałka prędkości przyjęto kv=0,3[![]()
]
Długość wektora prędkości punktu A na rysunku: ![]()
Równanie prędkości pkt. B
![]()
![]()
![]()
![]()
Z planu odczytano:
(VBA)=66,56 VBA =(VBA)*kv=66,56*0,3=19,97m/s
(VB)=43,89 mm VB=(VB)*kv=43,89*0,3=13,167 m/s
Na podstawie planu obliczono:
![]()
![]()
Równanie prędkości pkt. D
![]()
gdzie: VDA=2*AD=28,53*0,85=24,25 ; (VDA)=80,8 mm
![]()
![]()
Z planu odczytano:
(VD)=36,65 mm VD=(VD)*kv=36,65*0,3=10,99 m/s
Prędkość punktu S2: 
![]()
Z planu odczytano
(VS2)=69,9mm VS2=(VS2)kv=69,9*0,3=20,97 m/s
Analiza przyspieszeń
Przyspieszenie punktu A ![]()
Przyspieszenie punktu B:
![]()
![]()
![]()
Podziałka przyspieszeń, przyjęto: ka= 6 ![]()
Długość wektora przyspieszeń pkt B na rysunku: ![]()
![]()
Z planu odczytano:
![]()
![]()
![]()
![]()
![]()
![]()
Na podstawie planu obliczono:
![]()
![]()
Przyspieszenie punktu D:
![]()
aDn =22*DA=691,86 m/s2 (aDn)=115,31 mm
aDt = 2*DA=251,2 m/s2 (aDt)=41,8 mm
Przyspieszenie ptk S2:
![]()
![]()
![]()

Z planu odczytano:
![]()
![]()
2.2 Analiza kinematyczna mechanizmu - metoda analityczna
![]()
l1=0,7m ϕ1=180o ![]()
l2=0, 1 m ϕ2= 90 o ![]()
l3=0,7m f3=?
l4=0,9 f4=?
![]()

Po podstawieniu danych liczbowych
![]()
Podnosimy do kwadratu i dodajemy stronami
Oznaczamy w równaniu A= -2,59 oraz B= -0,143
otrzymamy

Po podstawieniu w= cos2 otrzymamy równanie kwadratowe
1,02w2 - 5,18w - 31,05=0 z którego wyliczymy
w1=0,353 w2=-0,549
a następnie dwie wartości 4=69,33 oraz 4=122,96
Przy czym ten drugi kąt dotyczy symetrycznego względem osi przechodzącej przez pkt B i D położenia mechanizmu.
kąt 3 wyliczymy z równania

![]()
Po różniczkowaniu tego równania otrzymamy
W celu obliczenia 3 obracam układ współrzędnych o kąt ϕ3
![]()
![]()
ponieważ ![]()
=0 możemy obliczyć
Po podstawieniu danych liczbowych
3=15,13s-1
Analogicznie obracając układ współrzędnych o kąt 4+90 otrzymamy:
![]()
ponieważ ![]()
można obliczyć
w celu obliczenia przyspieszeń różniczkujemy ![]()
przyjmując V1=const
![]()
![]()
Obracamy układ o kąt 3

; gdzie ![]()
=0
3=-636,1s-2
Analogicznie w celu obliczenia 2 obracamy układ o kąt 4

2=293,37s-2
3. Analiza kinetostatyczna mechanizmu
3.1 Przyjęcie mas, momentów bezwładności
Przyjęto:
M2=3kg
![]()
![]()
3.2 Obliczenie sił i momentów od sił bezwładności
![]()
; ![]()
![]()
; ![]()
przyjęto: P2=1000N
M3=40Nm
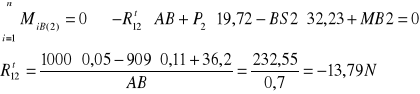
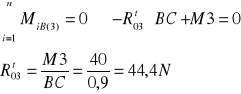
3.3 Analiza sił działających na grupę strukturalną
Obliczam składową styczną
Podziałka sił przyjmuję kR=10 N/mm
![]()
Z planu odczytano:
3.4 Analiza sił działających na człon napędzający
Z planu odczytano:
(R01)=34,26mm R01=342,6N
(Pr1)=13,96mm Pr1=139,6N
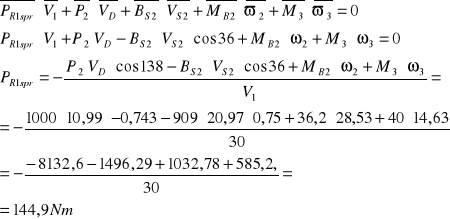
4. Sprawdzenie poprawności obliczeń metodą mocy chwilowych
Przemieszczenie punktu A
Prędkości punktu A
Przyspieszenia punktu A
Przemieszczenia punktu B
Prędkości punktu B
Przyspieszenia punktu B
Przemieszczenie punktu D
Prędkości punktu D
Przyspieszenia punktu D
Wyszukiwarka
Podobne podstrony:
TMM projekt, Studia Mechatronika, Semestr 4, TMM, Projekty
2B-I, Studia Mechatronika, Semestr 4, TMM, Projekty
tmm3a odz, Studia Mechatronika, Semestr 4, TMM, Projekty
TMM+3b - zmieniony, Studia Mechatronika, Semestr 4, TMM, Projekty
TMM+3b, Studia Mechatronika, Semestr 4, TMM, Projekty
5Bmoje, Studia Mechatronika, Semestr 4, TMM
TMM sprawko 1, Studia Mechatronika, Semestr 4, TMM
TI -wyklad 2, Studia - Mechatronika, I semestr, Technologia Informacyjna
Elektronika 6, Studia, Mechatronika, Semestr IV, Podstawy elektroniki, Laborki, ćw. 6
Sprawko nasze, Studia, Mechatronika, Semestr IV, Podstawy elektroniki, Laborki, ćw. 5
sprawko metro, Studia Mechatronika, Semestr 4, Metrologia
Elektronika 5 protokół stary, Studia, Mechatronika, Semestr IV, Podstawy elektroniki, Laborki, ćw. 5
2 projekt Biedka czaro poprawiona, studia IŚ, semestr 9, Biedka, projekt 2
Pytania na kolosa, Studia, Mechatronika, Semestr III, Techniki wytwarzania i systemy montażu, Wykład
Elektronika 6 protokół nowy, Studia, Mechatronika, Semestr IV, Podstawy elektroniki, Laborki, ćw. 6
Sprawko stabilizacja napięcia, Studia, Mechatronika, Semestr IV, Podstawy elektroniki, Laborki, ćw.
więcej podobnych podstron