ĆWICZENIE 44
WYZNACZANIE MOMENTU BEZWŁADNOŚCI BRYŁY SZTYWNEJ WZGLĘDEM
DOWOLNEJ OSI OBROTU Z WYKORZYSTANIEM TWIERDZENIA STEINERA
44.1 Opis teoretyczny
Żeby zastosować twierdzenie Steinera zwane również twierdzeniem o osiach równoległych
należy znać położenie środka masy danej bryły sztywnej.
Dla układu dyskretnego składającego się z N mas o różnych wartościach
i
m środek jego
masy wyznaczamy następująco. (Oczywiście masa całego układu M jest sumą mas składowych
i
m )
Najpierw należy obrać dowolny punkt w przestrzeni, który będziemy traktować jako punkt
odniesienia względem, którego określimy położenie środka masy. Wektory
[
]
i
i
i
i
z
y
x
r
,
,
=
r
opiszą
wówczas położenia poszczególnych mas składowych
i
m względem punktu odniesienia. Odległość
środka masy od punktu odniesienia określona wektorem
[
]
C
C
C
C
z
y
x
r
,
,
=
r
wyznacza się z
definicyjnej zależności:
∑
=
=
N
i
i
i
C
m
r
M
r
1
1
r
r
(44.1)
którą można rozłożyć na trzy następujące wyrażenia:
∑
=
=
N
i
i
i
C
m
x
M
x
1
1
(44.1a)
∑
=
=
N
i
i
i
C
m
y
M
y
1
1
(44.1b)
∑
=
=
N
i
i
i
C
m
z
M
z
1
1
(44.1c)
W przypadku ciała rozciągłego aby wyznaczyć jego środek masy należy rozłożyć go na
nieskończenie wiele maleńkich mas dm , których położenia względem punktu odniesienia są
określone wektorem
[
]
z
y
x
r
,
,
=
r
. Wówczas w powyższych wzorach sumy przyjmują postać
całek :
∫
=
dm
r
M
r
C
1
r
(44.2)
to znaczy
∫
=
dm
x
M
x
C
1
(44.2a)
∫
=
dm
y
M
y
C
1
(44.2b)
∫
=
dm
z
M
z
C
1
(44.2c)
Przy czym całkowanie musi się odbyć po wszystkich elementach dm to znaczy po całej objętości
ciała sztywnego.
Należy zwrócić szczególną uwagę na przypadek gdy punkt odniesienia pokrywa się ze środkiem
masy. Wówczas
[
]
0
,
0
,
0
=
C
rr
tzn.
0
;
0
;
0
=
=
=
∫
∫
∫
dm
z
dm
y
dm
x
(44.3)
Wielkość fizyczna zwana momentem bezwładności określa bezwładność ciała sztywnego
gdy wykonuje ono ruch obrotowy. Została ona dokładnie opisana w części teoretycznej w
ćwiczeniu nr 36. Ważnym jest, że jej wielkość zależy od osi, wokół której odbywa się obrót ciała.
Jeżeli znamy moment bezwładności ciała względem osi obrotu przechodzącej przez środek masy
ciała, to możemy za pomocą twierdzenia Steinera obliczyć momentem bezwładności tego ciała
względem innej osi równoległej do niej.
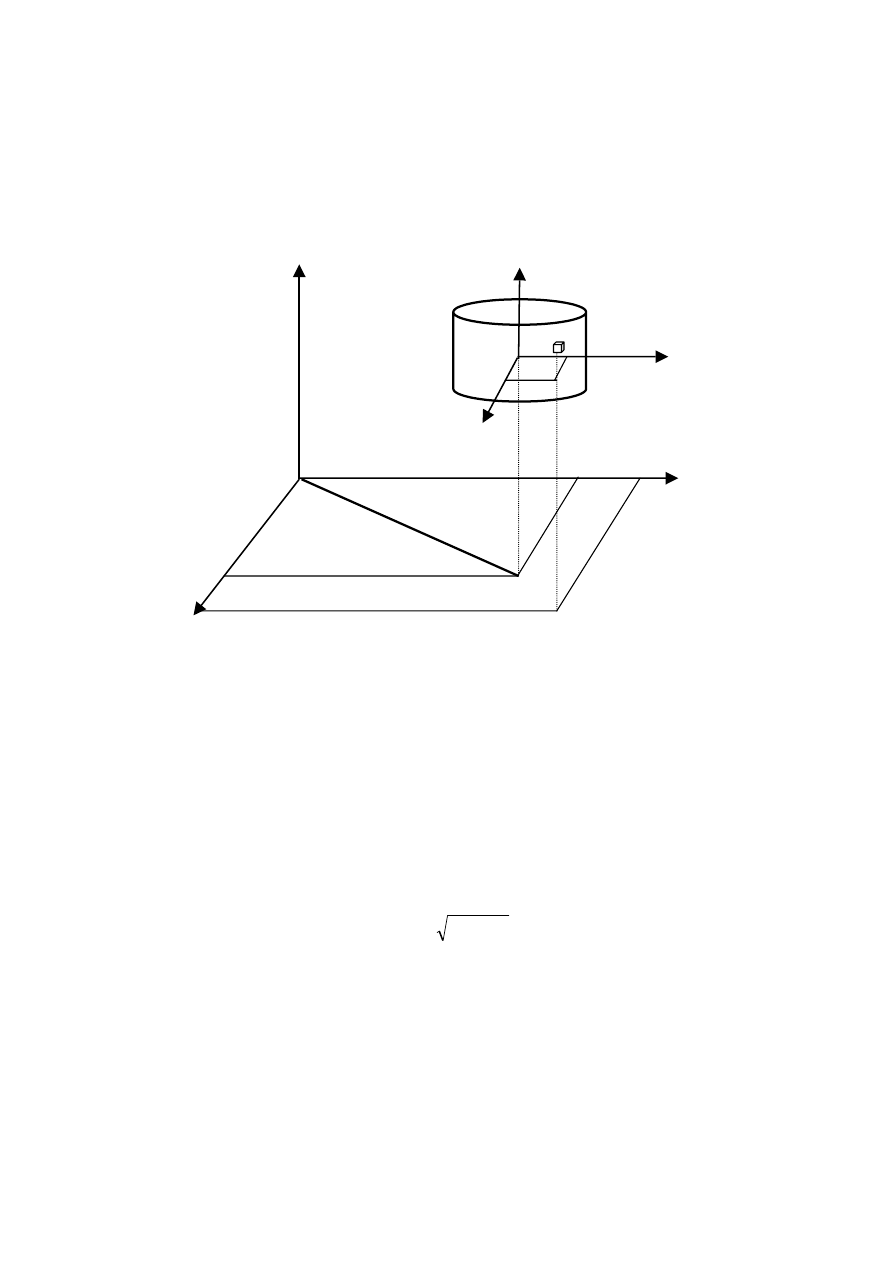
Z
*
Z
dm
Y
x
1
y
1
X
Y
*
d
x
C
x
2
y
C
X
*
y
2
Rys.44.1. Rysunek do wyprowadzenia twierdzenia Steinera
Dla ciała przedstawionego na powyższym rysunku znany moment bezwładności względem
osi obrotu przechodzącej przez jego środek masy ( jest to oś Z ) wyraża się całką:
∫
+
=
dm
y
x
J
Z
)
(
2
1
2
1
(44.4)
Wyrażenie
2
1
2
1
y
x
+
określa odległość elementu dm od osi Z
Analogicznie możemy napisać wyrażenie na moment bezwładności względem osi obrotu Z
*
równoległej do osi Z i oddalonej od niej o
2
2
C
C
y
x
d
+
=
, gdzie współrzędne
C
C
y
x i
określają
położenie środka masy rozpatrywanego ciała w nowym gwiazdkowanym układzie współrzędnych:
∫
+
=
dm
y
x
J
Z
)
(
2
2
2
2
*
(44.5)
Wyrażenie
2
2
2
2
y
x
+
określa odległość elementu dm od nowej osi Z
*
przy czym:
1
2
x
x
x
C
+
=
;
1
2
y
y
y
C
+
=
(44.6)
Podstawiając wyrażenia 44.6 do 44.5 otrzymujemy:
(
) (
)
[
]
(
)
∫
∫
+
+
+
+
+
=
+
+
+
=
dm
y
y
y
y
x
x
x
x
dm
y
y
x
x
J
C
C
C
C
C
C
Z
2
1
1
2
2
1
1
2
2
1
2
1
*
2
2
(44.7)
dalej grupując wyrażenia
(
)
(
)
∫
∫
∫
∫
+
+
+
+
+
=
dm
y
y
dm
x
x
dm
y
x
dm
y
x
J
C
C
C
C
Z
1
1
2
2
2
1
2
1
*
2
2
Pierwsza całka (zgodnie z 44.4) odpowiada wyjściowemu momentowi bezwładności J
Z
.
Ponieważ jak zaznaczyliśmy wyżej
2
2
2
d
y
x
C
C
=
+
i
∫
= M
dm
druga całka przyjmuje postać:
(
)
M
d
dm
y
x
C
C
2
2
2
=
+
∫
Dwie ostatnie całki zerują się, gdyż spełniony jest warunek 44.3 tzn. położenie środka masy w
pierwotnym układzie odniesienia określa wektor zerowy
[
]
0
,
0
,
0
=
C
rr
.
Reasumując równanie (44.7) przyjmuje postać:
2
*
d
M
J
J
Z
Z
+
=
(44.8)
I to jest właśnie twierdzenie Steinera opisujące związek między momentami bezwładności
Z
Z
J
J i
*
44.2. Metoda pomiaru.
W ćwiczeniu wyznaczamy momenty bezwładności okrągłej tarczy metalowej o promieniu
R = 15 cm . Posiada ona 5 otworów rozmieszczonych co 3 cm . Umożliwia to równoległe
przesuwanie osi jej obrotu o znaną wartość d . Tarczę mocuje się na balansowym sprężynowym
mechanizmie obrotowym. Tarcza odchylona z położenia równowagi o nie za duży kąt i puszczona
swobodnie wykonuje drgania harmoniczne jak wahadło torsyjne (patrz ćwiczenie nr 40)
Okres drgań tarczy wyraża się tym samym wzorem
D
J
π
2
T
=
(44.9)
gdzie: J – moment bezwładności tarczy względem zadanej osi obrotu.
D – stała zwana modułem skręcenia lub momentem kierującym zależna od budowy
mechanizmu torsyjnego . W ćwiczeniu wynosi ona 0,0255 Nm
W ten sposób mierząc okres drgań T wyznacza się moment bezwładności J. Stanowisko
wyposażone jest w fotokomórkę, za pomocą której można automatycznie zmierzyć połowę okresu
drgań czyli T/2 .
44.3. Wykonanie pomiarów.
Kolejność pomiarów jest następująca:
1. Zapoznać się z budową zestawu pomiarowego,
2. Umocować tarczę na centralnym otworze,
3. Włączyć fotokomórkę,

4. Obrócić tarczę o kąt 90
o
, nacisnąć na fotokomórce przycisk SET i puścić tarczę . Po
wykonaniu przez układ pełnego drgania, odczytać na wyświetlaczu czas T/2 . Czynność
powtórzyć dziesięciokrotnie, obracając tarczę po 5 razy w prawo i lewo,
5. Umocowywać tarczę na kolejnych otworach i powtarzając punkt 4 mierzyć kolejne
okresy drgań.
44.4 Opracowanie wyników pomiarów.
1. Obliczyć średnie arytmetyczne wyznaczonych okresów drgań: i ich średnie błędy
kwadratowe
2. Na podstawie zależności (44.9) obliczyć momenty bezwładności J dla 5 serii
pomiarowych oraz błędy na nich.
3. Wykonać wykres
)
(
2
d
f
J
=
.W eksperymencie d przyjmuje kolejno wartości:0 , 3 , 6 ,9
, 12 [cm] . Nanieść punkty pomiarowe wraz z błędami i poprowadzić przez nie
optymalną prostą najlepiej stosując metodę najmniejszych kwadratów Gaussa.
Reprezentuje ona twierdzenie Steinera ( wzór (44.8)). Wyciągnąć odpowiednie wnioski.
4. Z teoretycznego wzoru
2
2
1
MR
J
=
obliczyć moment bezwładności tarczy ( R = 15 cm ,
M = 0,4 kg) i porównać go z wynikiem eksperymentalnym (tzn. z miejscem przecięcia
prostej z punktu 3 z osią rzędnych). Wyciągnąć odpowiednie wnioski.
5. Obliczyć moment bezwładności tarczy względem osi stycznej i prostopadłej do niej.
L i t e r a t u r a
[1] Leyko J. :. :Mechanika ogólna . PWN W-wa 1995-r
[2] Kittel.C. , Knight W.D. , Ruderman M.A. :Mechanika. PWN W-wa 1973r.
Wyszukiwarka
Podobne podstrony:
LF E CW44
LF-E CW44
LF E CW44
LF E CW13(1)
LF E CW43(1)
LF E CW38(1)
LF 100 (2)
cw44(teoria)
cw44
MC DUR LF 480
Fizyka Laboratorium (rok I), LF 17, TABELA POMIAR˙W
Fizyka Laboratorium (rok I), LF 17, TABELA POMIAR˙W
więcej podobnych podstron