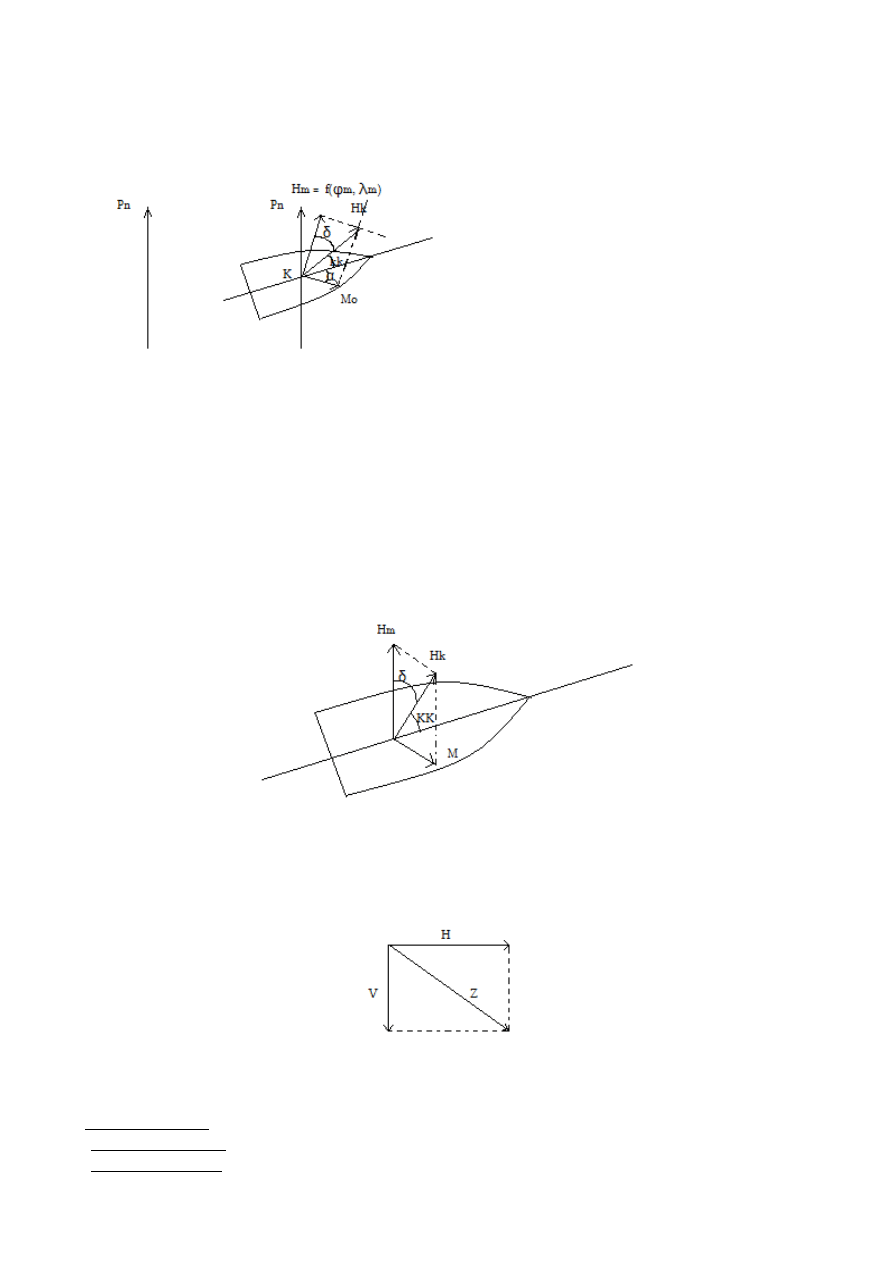
1. Dewiacja kompasu magnetycznego w ujęciu systematyki.
Kompas magnetyczny pracuje w systemie oddziaływania natężenia pola magnetycznego Ziemi Mz
oraz natężenia okrętowego pola magetycznego Mo. W efekcie kompas wskazuje kierunek
wypadkowy Hk.
Parametry magnetyzmu ziemskiego:
(T, H, θ), d
Mz = f(φm, λm, t) f( φm, λm, t),
Magnetyzm okrętowy (P, Q, R),
Mo = f ( φ, λ, α, KK, t),
gdzie,
φm, λm – współrzędne magnetycznej pozycji obserwatora,
t – moment obserwacji
KK – kierunek ułożenia statku w stosunku do południka kompasowego w stosunku do diametralnej
statku,
Mo – siła natężenia pola okrętowego,
Hk – kierunek wypadkowej,
d – deklinacja
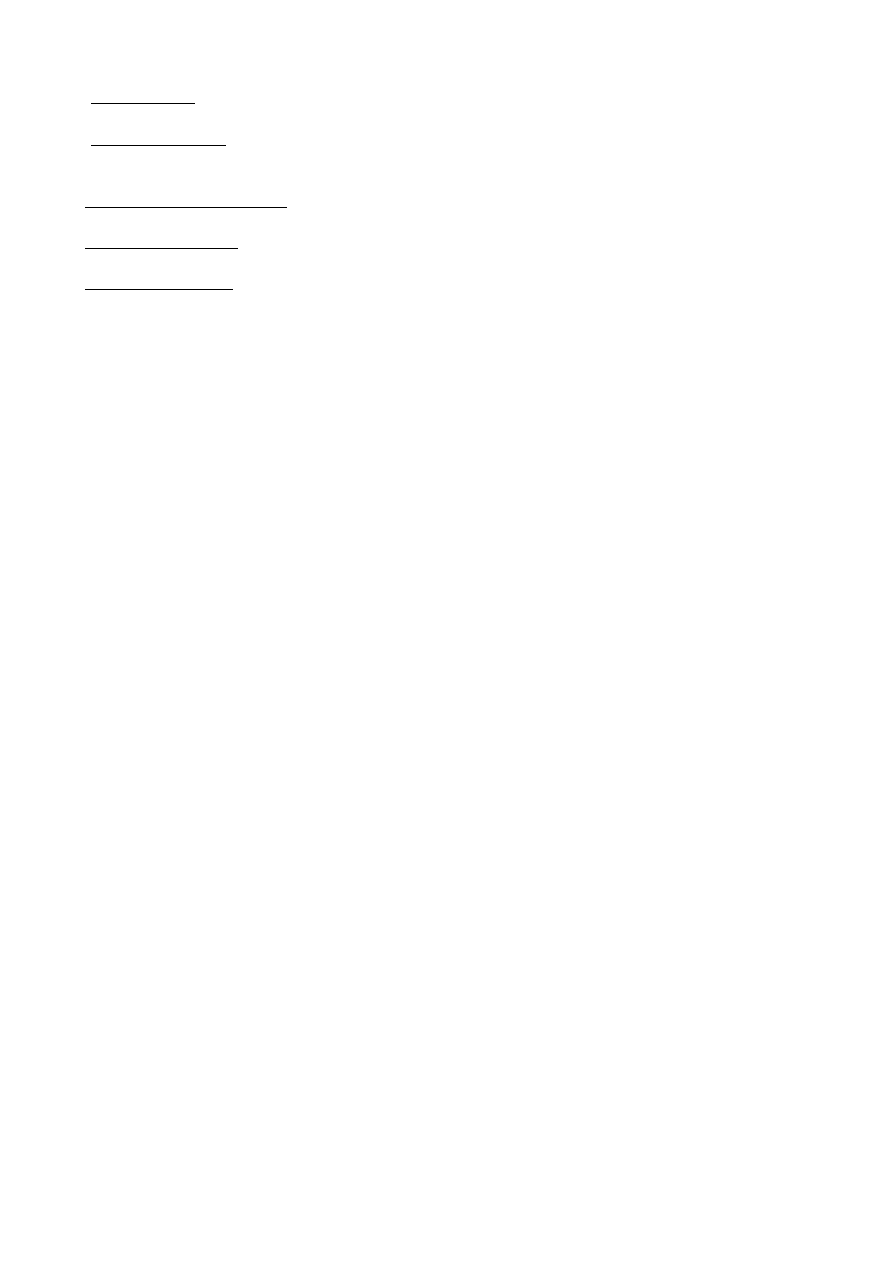
2. Dewiacja kompasu magnetycznego na statku stalowym od poziomej składowej M (na statku
nie przechylonym).
3. Rozkład składowych magnetyzmu ziemskiego w funkcji szerokości magnetycznej i czasu.
4. Przyczyny zmian parametrów magnetycznych ziemi (deklinacji, inklinacji)
-zmiany wiekowe - zmiany położenia biegunów magnetycznych ziemi (deklinacja, inklinacja)
-okresowe roczne – zależy od ruchu obiegowego Ziemi wokół Słońca,
-okresowe dobowe – zależy od położenia Ziemi w przestrzeni układu słonecznego
-nieregularne – ściśle związane z cyklami aktywności Słońca, spowodowane sztormami
magnetycznymi.
-zakłócenia lokalne- spowodowane układem warstw Ziemi i budowy geologicznej, obszary z
nagromadzonymi w skorupie ziemskiej materiałami np. sole, rudy.
5. Rodzaje magnetyzmu okrętowego.
Magnetyzm okrętowy stały – stal twarda – magnetyzm zaindukowany w stali okrętowej podczas
budowy kadłuba.
Magnetyzm zmienny – powstały w stali miękkiej poprzez oddziaływanie sił opisanych w sztabach
a,b,c,d, e, f, g,h,k.
Magnetyzm półstały – powstały w wyniku zmian kierunku położenia kadłuba, któremu towarzyszy
zjawisko zmian indukcji.
6. Zależności indukcji magnetycznej w stali miękkiej.
F
ind
= k * Hm * cosα,
gdzie,
F
ind
- siła indukcji magnetycznej,
k – parametr, który dla danej sztaby jest wartością stałą,
Hm – natężenie pola magnetycznego,
α – kąt pod jakim linie sił pola magnetycznego padają na sztabę.
7. Definicje współczynników λ1,λ2.
Λ1 – wyraża stosunek siły ustawiającą różę kompasu na północ magnetyczną Hm, na statku
nieskomensowanym do średniej siły ustawiającej różę kompasu w miejscu wolnym od działania
ferromagnetycznych H. Można to opisać wzorem:
λ1 = (1+((a+e)/2)), λ1=Hm/H
λ2 – współczynnik, który zastępuje λ1 po skompensowaniu kompasu, pozwala na dobranie
prawidłowo miejsca instalacji kompasu. Można opisać wzorem:
λ2 = (-1 - e1)
8. Ogólne równania Poissona.
Są to trzy równania za pomocą których można zapisać sumę sił oddziałujących na magnes róży
kompasowej w sytuacji gdy istnieje magnetyzm okrętowy stały P1, Q1, R1 oraz występują sztaby
wzdłużne - a, d, g; poprzeczne – b, e, h; i pionowe – c, f, k.
Uproszczona postać równań Poissona:
Fx = Xm + (P1) + (P2),
Fy = Ym + (Q1) + (Q2),
Fz = Zm + (R1) + (R2).
Normalna postać równań Poissona:
Fx = Xm + P1 + aX + bY + cZ;
Fy = Ym + Q1 + dX + eY +fZ;
Fz = Zm + R1 + gX +hY +kZ.
Postać rozwiniętych równań Poissona:
Fx = Xm + P1 + aH * cosKM – bHm * sinKM +cZm;
Fy = Yz + Q1 + dH * cosKM – eHm * sinKM +fZm;
Fz = Zm + R1 + gH * cosKM – hHm * sinKM + kZm.
9. Zależność na dewiację półokrężną (wzory)
- ogólna postać wzoru na dewiację półokrężną:
δ˚(p/q) = B˚ * sinKK + C˚ *cosKK,
- całkowita dewiacja półokrężna (na statku nieprzechylonym)
δ˚(p/q) = (B1˚ + B2˚) * sinKK + (C1˚ + C2˚) * cosKK

10. Dewiacja ćwierćokrężna i stała (rodzaje stali).
Źródłem powstania dewiacji ćwierćokrężnej i stałej jest indukcja w poziomej stali miękkiej,
symetrycznie i niesymetrycznie, usytuowanej w kadłubie statku w stosunku do róży kompasowej.
Dewiacja stała – dewiacja o charakterystyce A, wywołana sztabami stali miękkiej, poziomej,
niesymetrycznej b i d. Powstaje również wskutek błędów mechanicznych kompasu lub wad jego
instalacji. Stała dewiacja nie zależy od kursu, a jej rząd jest zwykle mały.
Dewiacja ćwierćokrężna – dewiacja o charakterystykach D, E; charakterystyka D wywołana
sztabami stali miękkiej, poziomymi, ciągłymi lub przerywanymi a i e. Zmienia się z sinusem
podwójnego KK. Maksymalna na kursach NE, SE, SW, NW. Jej wartość nie zmienia się z
szerokością magnetyczną . Charakterystyka E – wywołana sztabami poziomymi stali miękkiej,
niesymetrycznymi b i d. Zmienia się z cosinusem podwójnego KK. Jej wartość nie zmienia się z
szerokością magnetyczną. Maksymalna na głównych kursach N, E, S, W.
11.Obliczenie współczynników dewiacji: A, B, C, D, E
A = (δn + δne + δe + δse + δs + δsw + δw + δnw)/8 [˚],
B = (δe - δw)/2 [˚],
C = (δn - δs)/2 [˚],
D = ((δne + δsw) – (δse – δnw))/4 [˚],
E = ((δn + δs) – (δe – δw))/4 [˚],
12. Przyczyny powstawania dewiacji półokrężnej. (rodzaje stali).
Dewiacja półokrężna powstaje w wyniku oddziaływania sił P i Q.
Wzdłużna siła P → siła P1 powstała w magnetyzmie okrętowym stałym.
→ siła P2 zaindukowanej w stali miękkiej w sztabach pionowych
Poprzeczna siła Q → siła Q1 powstała w magnetyzmie okrętowym stałym.
→ siła Q2 zaindukowana w sztabach ze stali miękkiej ułożonych
pionowo w stosunku do pokładu statku.
13. Definicja współczynnika J (dewiacji przechyłowej)
Jest to liczba stopni dewiacji róży kompasowej, wywołanych przechyłem statku o jeden stopień na
kursie kompasowym N. Znak współczynnika zależy od tego w którą stronę odchyli się róża: „+”
gdy w stronę burty podniesionej,
„-” gdy w stronę burty obniżonej.
W praktyce współczynnika J nie oblicza się, stąd określona jest wartość bezwzględna.
14. Wyjaśnić przyczyny trudności kompensacji dewiacji kompasu magnetycznego do zera.
- wzajemna indukcja stali kompensacyjnych (miękkiej od twardej)
- błędy mechaniczne kompasu (dewiator może odkryć, nie może im przeciwdziałać)
- niesymetryczne ustawienie kompasu
15. Metody kompensacji dewiacji statku nieprzechylonego.
1. Kompensacja statku nieprzechylonego sposobem Airy:
Korzystając z nabieżnika lub żyrokompasu ustawia statki na KK, na których poszczególne
współczynniki dewiacji występują maksymalne i usuwamy dewiacje.
2. Kompensacja deflektorem statku nieprzechylonego.
Polega na wyrównaniu sił ustawiających na tych kursach, na których wartości sił występują
ekstremalne, za pomocą przyrządów do pomiaru siły ustawiającej. Pozwala na kompensację z
dokładnością do 3˚. Stosuje się tą metodę w sytuacji gwałtownej zmiany wartości dewiacji w
wyniku awarii, braku nabieżnika lub innego wzorca lub gdy pogoda nie pozwoli na ich
wykorzystanie.
16. Metody kompensacji dewiacji przechyłowej oraz jego identyfikacja.
- Kompensacja dewiacji przechyłowej za pomocą inklinometru.

Kompas ustawia si w miejscu wolnym od działania stali okrętowej, innych zakłócających źródeł
magnetycznych. Następnie wyważa się igłę inklinometru do poziomu takiego, aby doprowadzić do
zera na skali.
- Kompensacja dewiacji przechyłowej za pomocą koszyka. Statek doprowadza się do przechyłu na
wybranym kursie. Sprawdza się wielkość dewiacji i za pomocą zmiany położenia koszyka i zmiana
magnesów doprowadza się do wartości 0.
17. Działanie igły inklinacyjnej.
Igła inklinacyjna jest namagnesowanym cienkim, stalowym prętem służącym do kompensacji
dewiacji przechyłowej.
Ustawia się ją w poziomie za pomocą ciężarka. Ciężarek powinien być ustawiony w odległości l od
środka w punkcie podparcia. Gdyby nie ciężarek igła ustawiła by się pod kątem inklinacji miejsca.
18. Metoda sprawdzenia sprawności działania róży kompasowej kompasu magnetycznego.
I. Sprawdzenie dynamiki wskazań (metoda igły)
Zmiana kursu o zadaną wartość i powrót na kurs początkowy. Sprawdzania po jakim czasie igła
zareaguje. Dzięki temu możemy sprawdzić stabilność ruchową igły, jej statecznośći i czułości.
II. Sprawdzenie mechaniczne
Wywieranie sił ustawiających na tych kursach na których wartości sił występują ekstremalnie.
Wykonuję się za pomocą przyrządów do pomiaru siły ustawiającej.
III. Oględziny wzrokowe.
Sprawdzenie czy nie ma bąbelków powietrza, czy igła róży leży w poziomie.
19. Sposób określenia okresów wahań róży kompasowej.
Okres wahań róży kompasowej można określić ze wzoru:
T=2π(J/H*M)^1/2 [s];
J – moment bezwładności względem osi obrotu róży,
M – Moment magnetyczny układu magnetycznego róży,
H – pozioma składowa siły ustawiającej róży na północ magnetyczną.
20. Przygotowanie statku do określenia całkowitej dewiacji kompasu magnetycznego.
-wyrównanie przechyłu,
-silnik rozgrzany, przewody kominowe, temperatura normalna,
-sprawdzić czy nie ma innych statków w odległości mniejszej niż 5 kbl.
- usunąć wszystkie ruchome metalowe części z pobliża kompasu,
-ustawić i umocować wszystkie elementy konstrukcji,
- sprawdzić prawidłowość pracy róży kompasowej (wychylić o kąt od 0 do 10 i obserwować powrót
na kurs).
- kontrolować położenie płaszczyzny kreski kursowej w stosunku do płaszczyzny symetrii statku,
- zbadać prawidłowość pracy namiernika,
- przygotować odpowiednie magnesy stałe i ze stali miękkiej, do korektora Flindersa oraz klocki z
drewna,-
- ustalić sposób łączności z miejscem przy kompasie i z mostkiem,
- przygotować formularze do zapisu danych pomiarowych i wykresu krzywej dewiacji.
21.Wykorzystanie ogólne wzoru Archibalda Smitha w dewiacji kompasów magnetycznych.
Wykorzystując wyniki obserwacji dewiacji na 8 głównych KK, można na podstawie znanych
wzorów określić wszystkie współczynniki dewiacji. Wartości współczynników
podstawione do ogólnego wzoru A. Smitha, pozwalają obliczyć wartość dewiacji dla dowolnych
KK.
22. Metody określenia krzywej dewiacji (tabeli) KM w różnych fazach żeglugi morskiej.
Żegluga przybrzeżna – metody pomiarowe, porównanie namiarów kompasowych z namiarami
magnetycznymi nabieżników.
W rejonach przybrzeżnych lub w rejonach podejścia do lądu- metoda porównania namiarów na
bardzo odległy przedmiot w czasie wykonania cyrkulacji.
Oceaniczna faza pływowa – metoda porównania azymutów ciał niebieskich z namiarami
kompasowymi badanego kompasu magnetycznego.

23. Wymień momenty w których należy określić tabelę dewiacji KM oraz przyczyny zmian
dewiacji.
Dewiację kompasu na statku określa się w następujących sytuacjach:
-przed wejściem do eksploatacji,
-po znacznych zmianach konstrukcyjnych w pobliżu kompasu,
-przy znacznych zmianach szerokości magnetycznych,
-po silnych wstrząsach kadłuba,
-po uderzeniu pioruna, pożaru lub spawaniu,
-po wejściu na mieliznę,
-co najmniej raz do roku,
-w przypadku przewozu ładunków o silnych wł. magnetycznych.
24. Opisać sposoby określania tabeli dewiacji KM wykorzystując system GPS.
Metoda polega na wczytaniu pozycji obiektu (np. latarni) do odbiornika jako punkt zwrotu w
momencie obserwacji namiaru kompasowego na obiekt (latarnia) i określenie pozycji w
odbiornikach otrzymuje się odległość do pozycji obserw. do obiektu. Możemy również uzyskać
kierunek rzeczywisty, czyli NR z pozycji obserwowanej na latarnie.
25. Przyczyny powstawania współczynnika typu A i sposoby jego usuwania.
Kompozycja sztab b i d powoduje powstanie dewiacji stałej typu A. Współczynnik ten jest
niezależny od kursu:
-mechaniczne błędy konstrukcji róży kompasowej,
-nieprawidłowe zainstalowanie kompasu,
-błąd namiernika,
-błąd określenia tablicy dewiacji,
-błędy kąta godzinnego przy namiarach na ciało niebieskie,
-błędy wynikające z porównania KM i KŻ którego wskazania repetytora nie są zgodne ze
wskazaniami żyromatki.
W celu uniknięcia współcz. A należy sprawdzić:
-wartość deklinacji miejsca obserwacji dewiacji,
-ustawienie osi róży w odniesieniu do magnesów układu kierującego,
-wskazań repetytora i żyromatki,
-oś lusterka azymutalnego w namierniku,
-kąt godzinny przy obliczeniu ciał niebieskich.
Wartość współczynnika A nie powinna przekraczać 1˚.
26. Metody kompensacji dewiacji przechyłowej kompasu magnetycznego w czasie pływania
na fali.
Kompensacje dewiacji przechyłowej stosuje się tylko w sprzyjających warunkach pogodowych.
Wiąże się to z elementami dokładności pomiarów daną metodą, zmiany układu statku, lokalnych
przyspieszeń na statku kompensacji. Dewiacji wykonuje się przy stanie morza do 3 i sile wiatru do
3 – 4˚B.
Wyszukiwarka
Podobne podstrony:
Dewiacja teoria
DEWIACJE PROCESU WYCHOWANIA. PRZYCZYNY, Studia rok I, Teoria wychowania
Dewiacja, Szkoła, penek, Przedmioty, Nawigacja, Teoria, Materiały do nauki na I egzamin Nawigacyjny
Dewiacja wybrane teorie, min teoria?wicji Mertona , Cohena
teoria bledow 2
sroda teoria organizacji i zarzadzania
Socjologia Dewiacji
W10b Teoria Ja tozsamosc
Teoria organizacji i kierowania w adm publ prezentacja czesc o konflikcie i zespolach dw1
prezentacja dewiacje seksualne
wZ 2 Budowa wiedzy społecznej teoria schematów
TEORIA NUEROHORMONALNA EW
zarzadcza teoria 3
więcej podobnych podstron