
Uwaga: tekst jest wiern ¾
a kopi ¾
a, z uwzgl ¾
ednieniem
erraty
, stron 68–80 ze skryptu
PK ’Ustroje powierzchniowe’autorstwa Marii Radwa´nskiej i Zenona Waszczyszyna
3.10. METODA ENERGETYCZNA (RITZA)
Metoda ta opiera si ¾
e na tzw. zasadzie minimum energii potencjalnej ustroju, która
mówi: spo´sród kinematycznie dopuszczalnych pól przemieszcze´n (spe÷
niaj ¾
acych
kinematyczne warunki brzegowe) rozwi ¾
azaniem spe÷
niaj ¾
acym warunki równowagi
ustroju b ¾
edzie pole przemieszcze´n, dla którego energia potencjalna
osi ¾
aga min-
imum. Warunkiem koniecznym minimum funkcjona÷
u energii jest zerowanie si ¾
e
jego pierwszej wariacji:
= 0:
(3.24)
Wykorzystanie praktyczne zasady minimum energii poka·
zemy w odniesieniu do
zginania p÷
yt, dla których polu przemieszcze´n odpowiada funkcja ugi ¾
ecia w(x; y):
Rozwi ¾
azania przybli·
zonego poszukujemy w postaci:
e
w(x; y) =
N
X
i=1
w
i
i
(x; y);
(3.25)
gdzie w
i
s ¾
a wspó÷
czynnikami, a
i
(x; y)
znanymi funkcjami, spe÷
niaj ¾
acymi kine-
matyczne warunki brzegowe. W odniesieniu do tych funkcji przyjmujemy ponadto,
·
ze s ¾
a one liniowo niezale·
zne, a wi ¾
ec rozwi ¾
azaniem (3.24) b ¾
edzie liniowa kombinacja
funkcji
i
.
Warunek (3.24) piszemy w postaci
=
X
i
@
@w
i
w
i
= 0;
gdzie wariacje w
i
wynikaj ¾
a z wirtualnego przemieszczenia:
e
w =
X
i
w
i
i
(x; y):
1

Warunek
= 0
ma by´c spe÷
niony dla dowolnej wariacji w
i
, a wi ¾
ec zamiast
(3.24) mo·
zemy rozpatrywa´c równowa·
zny uk÷
ad równa´n:
@
@w
i
= 0
dla
i = 1; : : : ;
N
(3.24a)
Je´sli do funkcjona÷
u energii (2.57) podstawimy funkcj ¾
e
e
w(x; y)
, to energia
spr ¾
e·
zysta (2.61) b ¾
edzie form ¾
a kwadratow ¾
a, a praca obci ¾
a·
ze´n powierzchniowych
form ¾
a liniow ¾
a wzgl ¾
edem wspó÷
czynników w
i
:
=
D
2
ZZ
A
8
>
>
>
>
>
<
>
>
>
>
>
:
P
j
w
j
r
2
j
!
2
2 (1
)
2
4
P
j
w
j
j
;xx
!
P
j
w
j
j;yy
!
P
j
w
j
j
;xy
!
2
3
5
9
>
>
>
>
>
=
>
>
>
>
>
;
dxdy
X
j
w
j
ZZ
A
p
j
dxdy:
Po zró·
zniczkowaniu wzgl ¾
edem kolejnych wspó÷
czynników w
i
mo·
zemy napisa´c
(3.24a) w postaci uk÷
adu równa´n liniowych:
N
X
j=1
a
ij
w
j
= b
i
dla
i = 1; : : : ; N ;
(3.26)
gdzie wspó÷
czynniki a
ij
i b
i
wynosz ¾
a:
a
ij
= D
RR
A
r
2
i
r
2
j
(1
) (
i;xx
j;yy
+
j;xx
i;yy
2
i;xy
j;xy
) dxdy;
b
i
=
RR
A
p(x; y)
i
dxdy:
(3.27)
Tak samo wyprowadzamy wzory dla uk÷
adu wspó÷
rz ¾
ednych biegunowych. Tutaj
2
przytaczamy je tylko dla przypadku ko÷
owej symetrii:
a
ij
= D
a
R
b
i;rr
+
1
r
i;r
j;rr
+
1
r
j;r
(1
)
1
r
(
i;rr
j;r
+
j;rr
i;r
) r dr;
b
i
=
a
R
b
p(r)
i
r dr:
(3.27a)
Opisana metoda jest przybli·
zona. Jej dok÷
adno´s´c zale·
zy od doboru funkcji
dopuszczalnych
i
(x; y)
. W zale·
zno´sci od warunków podparcia funkcjami do-
puszczalnymi mog ¾
a by´c funkcje trygonometryczne, wielomiany lub funkcje odpowiada-
j ¾
ace postaciom wyboczenia albo drga´n w÷
asnych. w ustrojach powierzchniowych
najcz ¾
e´sciej przyjmuje si ¾
e funkcje z rozdzielonymi zmiennymi:
i
(x; y) =
X
k(i)
X
m(i)
X
k
(x)Y
m
(y):
(3.28)
Przyk÷
adowo funkcjami
i
mog ¾
a by´c nast ¾
epuj ¾
ace kombinacje X
k
i Y
m
:
1
= X
1
Y
1
;
2
= X
1
Y
2
+ X
2
Y
1
;
3
= X
2
Y
2
; : : :
(3.28a)
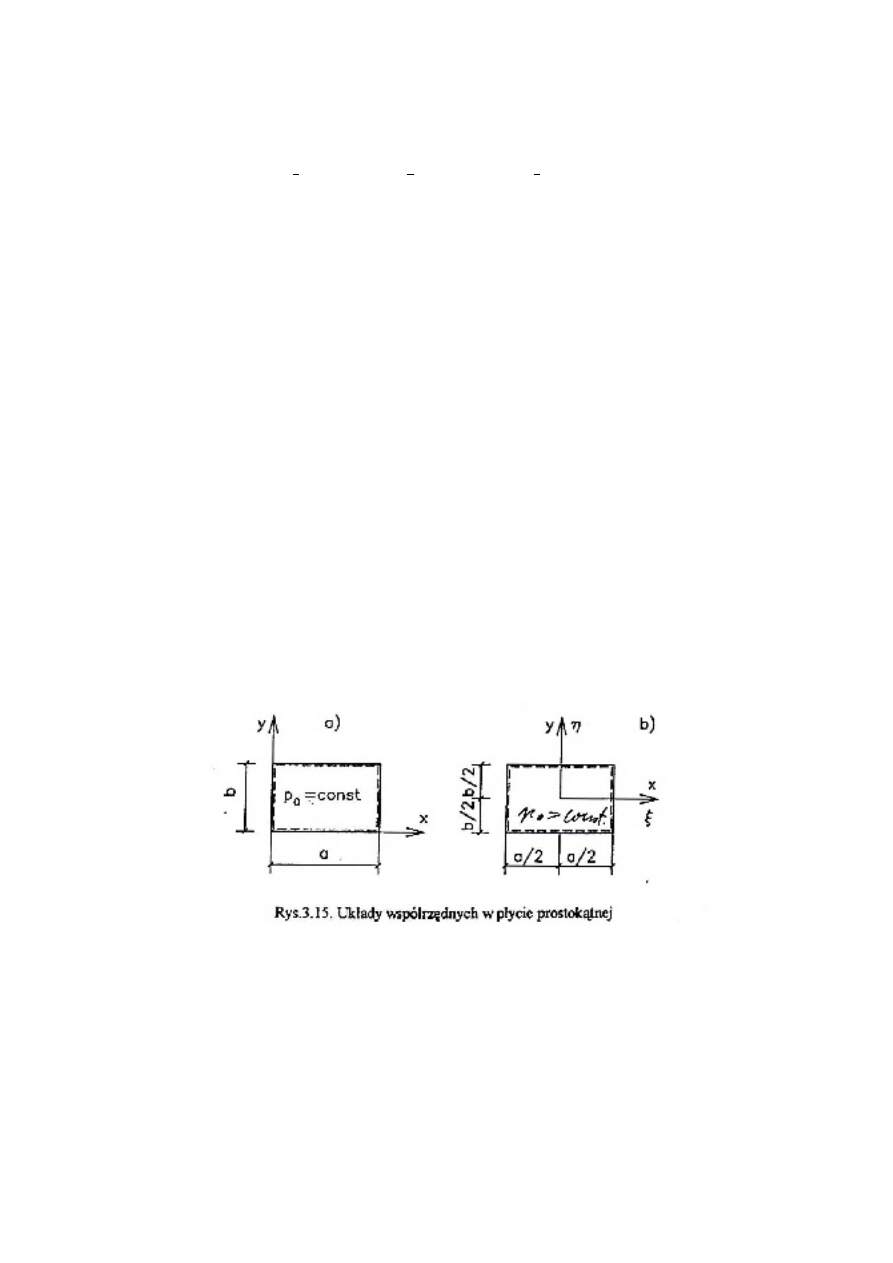
Przyk÷
ad 3.7.
P÷
yta przegubowo podparta obci ¾
a·
zona równomiernie
(rys. 3.15)
Zajmiemy si ¾
e prostymi, jednowymiarowymi funkcjami dopuszczal-
3
nymi. Zaczynamy od funkcji trygonometrycznej:
1
= sin
x
a
sin
y
b
:
(3.29)
Funkcja ta spe÷
nia warunki brzegowe, tak kinematyczne, jak te·
z statyczne.
Przy liczeniu wspó÷
czynnika a
11
pod ca÷
k ¾
a wzoru (3.27)
1
pomijamy cz÷
on z
mno·
znikiem (1
)
zgodnie z p. (2:
8
:2)
a
11
=
4
D
1
a
2
+
1
b
2
2
Z
a
0
Z
b
0
sin
2
x
a
sin
2
y
b
dxdy =
4
D
ab
4
1
a
2
+
1
b
2
2
;
b
1
= p
0
Z
a
0
Z
b
0
sin
x
a
sin
y
b
dxdy =
4
2
p
0
ab :
Na ich podstawie wspó÷
czynnik w
1
:
w
1
=
b
1
a
11
=
16
6
1 +
a
2
b
2
2
p
0
a
4
D
:
(3.30)
Wracaj ¾
ac do funkcji (3.29), otrzymujemy funkcj ¾
e ugi ¾
ecia:
e
w = w
1
1
= w
1
sin
x
a
sin
y
b
:
Rozwi ¾
azanie (3.30) odpowiada pierwszemu szeregowi z przyk÷
adu 3.4. Maksy-
malne ugi ¾
ecie jest okre´slone wspó÷
czynnikiem w
1
. Dla p÷
yty kwadratowej otrzy-
mujemy:
w
1
=
b
1
a
11
=
4
6
p
0
a
4
D
= 0:00416
p
0
a
4
D
= 1:025 w
sc
;
(3.31)
gdzie w
sc
= 0:00406
p
0
a
4
D
, zgodnie z tabl. 3.1.
Funkcja dopuszczalna musi by´c co najmniej dwukrotnie ró·
zniczkowalna i powinna
spe÷
nia´c kinematyczne warunki brzegowe. Tak ¾
a funkcj ¾
a mo·
ze by´c:
1
= 1
2
1
2
;
(3.32)
4
gdzie ,
s ¾
a bezwymiarowymi wspó÷
rz ¾
ednymi dla uk÷
adu zaczepionego w ´srodku
p÷
yty:
=
2x
a
;
=
2y
b
dla
;
2 [ 1; 1] :
(3.33)
Dla p÷
yty kwadratowej maksymalne ugi ¾
ecie wynosi:
w
1
=
5
1408
p
0
a
4
D
= 0:00355
p
0
a
4
D
= 0:874 w
sc
;
a wi ¾
ec b÷¾
ad rozwi ¾
azania wynosi 12.6%, w porównaniu z 2.5% b÷¾
edu dla funkcji
dopuszczalnej (3.29).
Inn ¾
a mo·
zliwo´sci ¾
a doboru funkcji dopuszczalnych jest przyj ¾
ecie X
1
( ); Y
1
( )
jako linii ugi ¾
ecia belki wolnopodpartej:
1
=
1
6
5
2
+
1
5
4
1
6
5
2
+
1
5
4
:
(3.34)
Dla p÷
yty kwadratowej otrzymujemy:
w
1
= 0:00393
p
0
a
4
D
= 0:968 w
sc
;
a wie b÷¾
ad wynosi 3.2%.
Przytoczone rozwi ¾
azania wskazuj ¾
a na znaczne zwi ¾
ekszenie dok÷
adno´sci przy
spe÷
nieniu wszystkich warunków brzegowych (nie tylko kinematycznych) przez
funkcje dopuszczalne. Funkcja (3.32) pomimo do´s´c dobrej warto´sci ugi ¾
ecia b ¾
edzie
ponadto dawa÷
a b÷¾
edne warto´sci momentów i si÷poprzecznych.
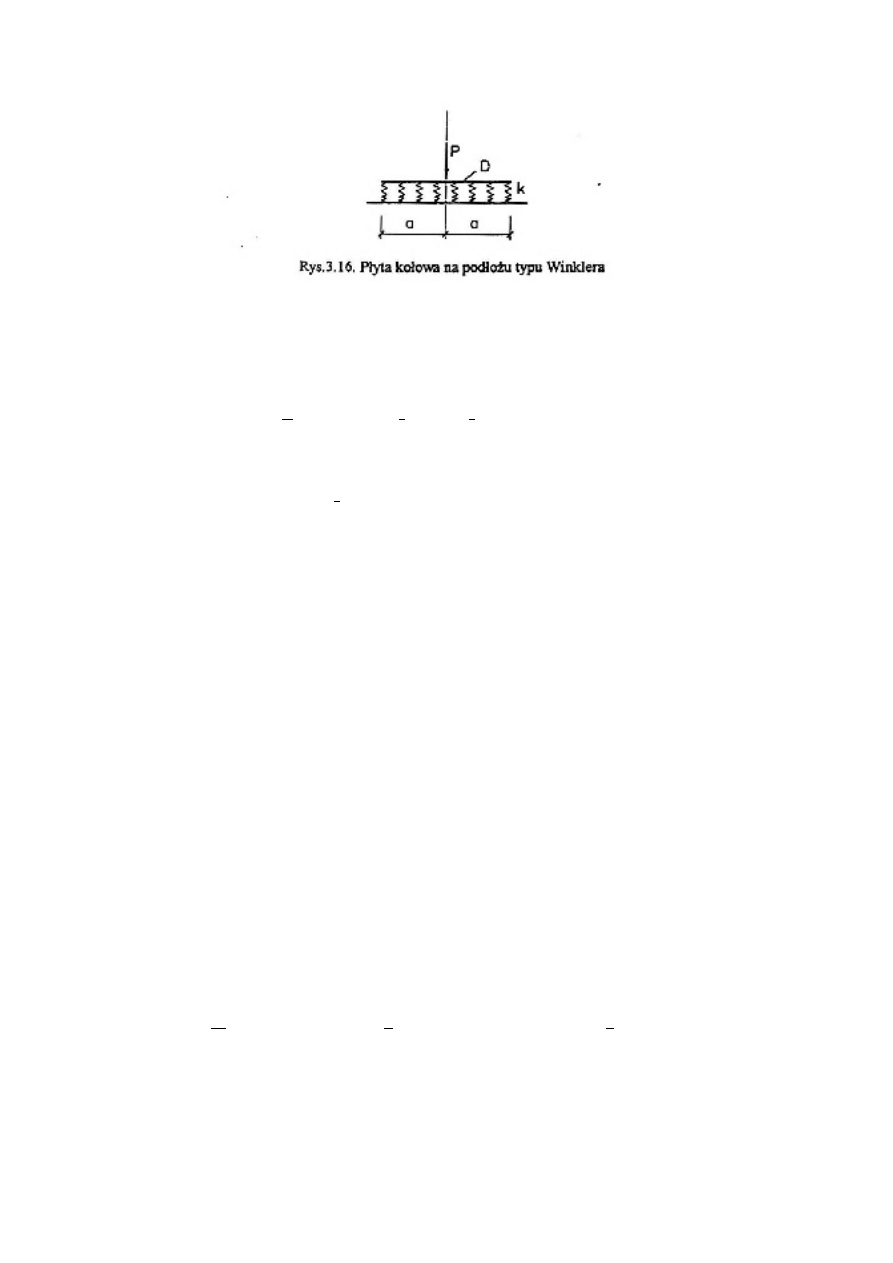
Przyk÷
ad 3.8.
P÷
yta ko÷
owa na pod÷
o·
zu spr ¾
e·
zystym typu Winklera
(rys. 3.16).
Ca÷
kowita energia potencjalna sk÷
ada si ¾
e z energii spr ¾
e·
zystej zgi-
nania U
m
oraz pracy obci ¾
a·
ze´n W
p
i odporu pod÷
o·
za W
w
:
= U
m
+ W
p
+ W
w
;
5
gdzie poszczególne cz÷
ony wynosz ¾
a:
U
m
=
D
2
2
R
0
a
R
0
h
w
;rr
+
1
r
w
;r
2
2
r
(1
) w
;rr
w
;r
i
r drd ;
W
p
=
P w(0) ;
W
w
=
2
R
0
a
R
0
1
2
( kw) w r drd :
Jako funkcj ¾
e dopuszczaln ¾
a przyjmujemy cz ¾
e´s´c ca÷
ki ogólnej (3.6)
1
:
w = w
1
+ w
2
r
2
;
(3.35)
a wi ¾
ec st ¾
ad wynika:
1
= 1 ;
2
= r
2
;
w(0) = w
1
:
Do obliczenia ca÷
ki energii spr ¾
e·
zystej potrzebujemy pochodne:
w
;r
= 2w
2
r ;
w
;rr
= 2w
2
;
co prowadzi do zwi ¾
azku mi ¾
edzy energi ¾
a potencjaln ¾
a i parametrami w
1
; w
2
:
= 2
8
<
:
D
2
a
Z
0
(2w
2
+ 2w
2
)
2
2
r
(1
) 2w
2
2w
2
r r dr +
a
Z
0
1
2
k w
1
+ w
2
r
2 2
r dr
9
=
;
P w
1
:
Warunek zerowania si ¾
e pierwszej wariacji energii potencjalnej prowadzi do rów-
6
na´n (3.24a):
1
2
@
@w
1
k
a
R
0
(w
1
+ w
2
r
2
) r dr
P
2
= 0 ;
1
2
@
@w
2
D
a
R
0
8
(1 + ) w
2
r dr + k
a
R
0
(w
1
r
2
+ w
2
r
4
) r dr = 0 ;
które po obliczeniu ca÷
ek mo·
zemy przekszta÷
ci´c do postaci:
w
1
+
a
2
2
w
2
=
P
a
2
k
;
w
1
+
2
3
+ 16 (1 + )
D
ka
4
a
2
w
2
= 0 :
Rozwi ¾
azanie mo·
zemy wi ¾
ec przedstawi´c w postaci:
w
1
=
4 + 96 (1 + ) c
1 + 96 (1 + ) c
pa ;
w
2
=
6
1 + 96 (1 + ) c
p
a
;
(3.36)
gdzie pos÷
u·
zono si ¾
e bezwymiarowymi wielko´sciami:
c =
D
ka
4
;
p =
P
ka
3
:
W [15] na str. 245 jest podane rozwi ¾
azanie ´scis÷
e:
w
max
= 4:30 10
2
cm = w
sc
dla danych:
a = 5
cm ;
c = 1 ;
= 0:3 ;
p = 8:16 10
3
:
Po podstawieniu tych danych do (3.36) otrzymujemy:
w
1
= 4: 18
10
2
cm = 0:97 w
sc
;
7

a wi ¾
ec b÷¾
ad wynosi 3% pomimo, ·
ze funkcja (3.35) nie spe÷
nia wszystkich warunków
brzegowych.
Nale·
zy doda´c, ·
ze przyj ¾
eta funkcja (3.35) nie jest wystarczaj ¾
aca do obliczania
rozk÷
adu momentów zginaj ¾
acych, zw÷
aszcza w otoczeniu przy÷
o·
zonej si÷
y skupionej.
Aby otrzyma´c dobre przybli·
zenie, nale·
za÷
oby uwzgl ¾
edni´c co najmniej cz÷
on
3
=
r
2
ln r:
3.11. METODA ORTOGONALIZACYJNA (BUBNOWA-GALERKINA)
Równanie ró·
zniczkowe p÷
yty mo·
zemy napisa´c w skróconej postaci
r
2
r
2
w
p
D
L (w; p) = 0:
(3.37)
Przybli·
zone rozwi ¾
azanie przyjmujemy w takiej samej postaci jak w metodzie Ritza:
e
w =
N
X
i=1
w
i
i
(x; y):
(3.38)
Funkcje bazowe
i
(x; y)
maj ¾
a by´c liniowo niezale·
zne i powinny spe÷
nia´c warunki
brzegowe zadania.
Poniewa·
z
e
w
jest rozwi ¾
azaniem przybli·
zonym, to po podstawieniu tej funkcji do
równania (3.37) powstanie funkcja b÷¾
edu:
L (
e
w; p) = R (x; y) :
W metodzie Bubnowa-Galerkina b÷¾
ad b ¾
edzie minimalny, je´sli wspó÷
czynniki w
i
rozwi ¾
azania (3.38) obliczymy z warunków ortogonalno´sci funkcji R (x; y) i funkcji
bazowych
i
(x; y) :
ZZ
A
L
N
X
j=1
w
i
i
; p
!
i
dA = 0
dla
i = 1; : : : ;
N
:
(3.39)
8

Po uwzgl ¾
ednieniu (3.37) dochodzimy do nast ¾
epuj ¾
acego uk÷
adu równa´n liniowych:
N
X
j=1
0
@
ZZ
A
r
2
r
2
j
i
dxdy
1
A w
j
=
ZZ
A
p
D
i
dxdy;
który mo·
zna napisa´c w postaci skróconej:
N
X
j=1
a
ij
w
j
= b
i
dla
i = 1; : : : ;
N
;
(3.40)
gdzie wspó÷
czynniki a
ij
i b
i
wynosz ¾
a:
a
ij
=
RR
A
r
2
r
2
j
i
dA;
b
i
=
RR
A
p
D
i
dA:
(3.41)
Wzory (3.41) s ¾
a wa·
zne dla ró·
znych uk÷
adów wspó÷
rz ¾
ednych.
Metoda ortogonalizacji jest ogólniejsza od metody energetycznej. Mo·
zna j ¾
a
stosowa´c bez budowania funkcjona÷
u energii p otencjalnej. Z tego powodu metoda
ortogonalizacji jest u·
zywana w analizie ró·
znych zagadnie´n, gdzie mo·
zna wyprowadzi´c
równanie ró·
zniczkowe (lub uk÷
ady równa´n) bez uciekania si ¾
e do odpowiednich
funkcjona÷
ów. Przyk÷
adem mo·
ze by´c analiza zginania p÷
yt niespr ¾
e·
zystych.
W metodzie energetycznej pos÷
ugujemy si ¾
e funkcjami kinematycznie dopuszczal-
nymi
i
2 C
2
, a wi ¾
ec dwukrotnie ró·
zniczkowalnymi. W podanej metodzie ortog-
onalizacji musimy przyjmowa´c funkcje bazowe
i
2 C
4
:
Dok÷
adniej omówimy metod ¾
e Ritza i Bubnowa-Galerkina w dodatku D.3. Wykazano
tam, ·
ze pomijanie cz÷
onów brzegowych w energii potencjalnej
lub ca÷
ce b÷¾
edu R
prowadzi do równowa·
zno´sci obydwu metod w przypadku kinematycznych warunków
brzegowych p÷
yty.
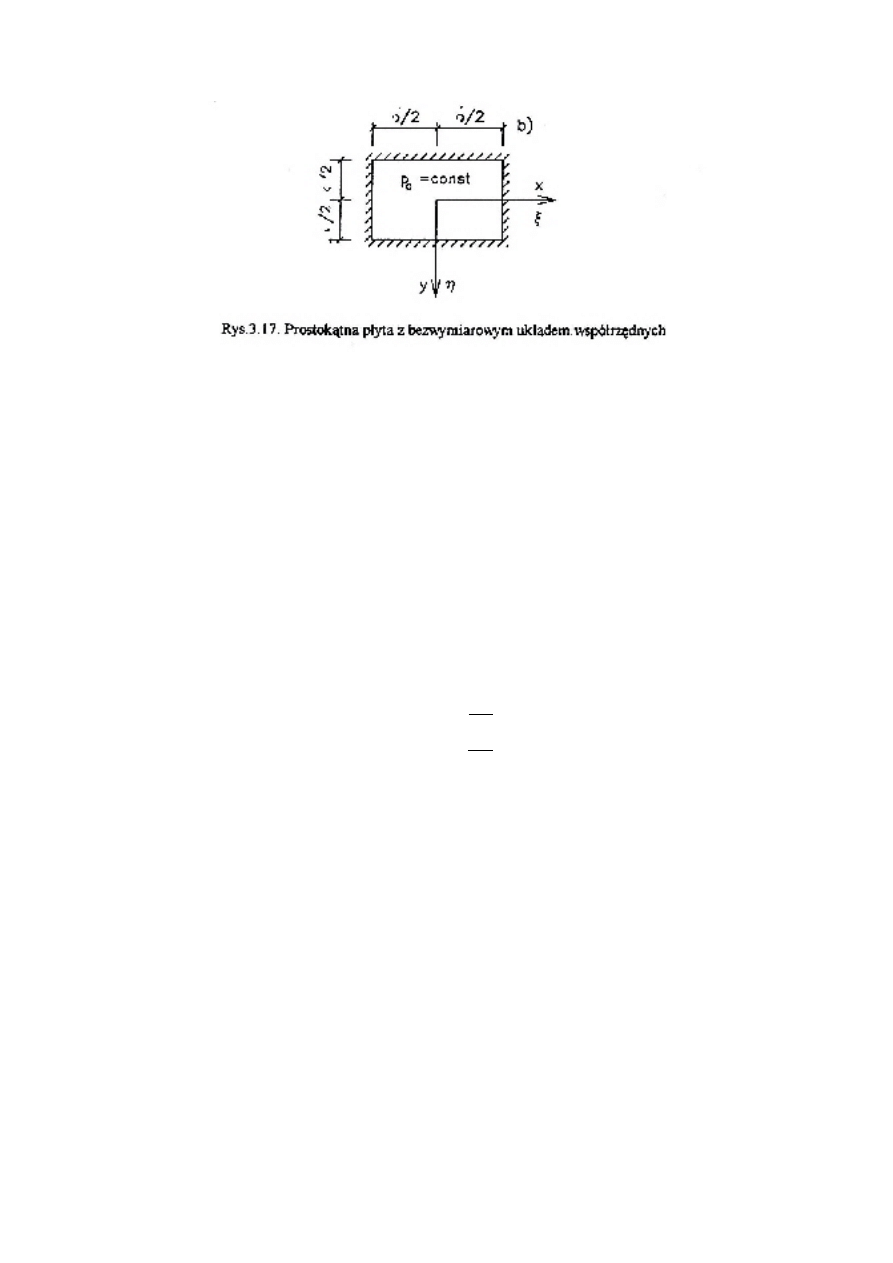
Przyk÷
ad 3.9 P÷
yta utwierdzona obci ¾
a·
zona równomiernie (rys. 3.17).
Dla wspó÷
rz ¾
ednych bezwymiarowych (3.33) przyjmujemy funkcje bazowe (3.28), a
9
wi ¾
ec:
1
= X
1
Y
1
;
2
= X
1
Y
2
+ X
2
Y
1
;
3
= X
2
Y
2
;
gdzie funkcje jednej zmiennej wynosz ¾
a:
X
1
=
2
1
2
;
X
2
=
2
X
1
;
Y
1
= (
2
1)
2
;
Y
2
=
2
Y
1
:
Funkcje te spe÷
niaj ¾
a warunki brzegowe:
X
k
( 1) = 0;
@X
k
@x
= 1
= 0;
Y
m
( 1) = 0;
@Y
m
@y
= 1
= 0:
Obliczymy 3 kolejne przybli·
zenia ugi ¾
ecia p÷
yty:
e
w
(n)
=
n
X
i=1
w
i
1
:
Wspó÷
czynniki a
ij
, b
i
obliczono dla p÷
yty kwadratowej w [15]. Prowadzi to do
10
nast ¾
epnego uk÷
adu równa´n liniowych:
106:997w
1
+ 19:4541w
2
+ 1:08078w
3
= 0:142222w
0
;
19:4541w
1
+ 43:8964w
2
+ 3:49168w
3
= 0:0406349w
0
;
1:08078w
1
+ 3:49168w
2
+ 0:094474w
3
= 0:00290245w
0
;
gdzie po prawej stronie wyst ¾
epuje wspó÷
czynnik w
0
= p
0
a
4
=D:
Kolejne przybli·
zenia
otrzymujemy przez rozwi ¾
azanie coraz wi ¾
ekszej liczby równa´n:
w
(1)
1
= 0:001329w
0
;
w
(2)
1
= 0:001268w
0
;
w
(2)
2
= 0:0003379w
0
;
w
(3)
1
= 0:001264w
0
;
w
(3)
2
= 0:0003343w
0
;
w
(3)
3
= 0:00003906w
0
:
Z postaci funkcji dopuszczalnych wynika, ·
ze w
(i)
1
odpowiada ugi ¾
eciu ´srodka
p÷
yty:
w
max
= w (0; 0) = w
(n)
1
:
Obliczone warto´sci mo·
zna porówna´c z rozwi ¾
azaniem otrzymanym podwójnymi
szeregami trygonometrycznymi. W [15], str.193 dla p÷
yty kwadratowej b=a = 1
podano rozwi ¾
azania, które mo·
zna uzna´c za ´scis÷
e:
w (0; 0) = 0:00126
p
0
a
4
D
= w
sc
;
sk ¾
ad wynika:
w
(1)
1
= 1:0548w
sc
:
Je´sli jako rozwi ¾
azanie przybli·
zone przyjmiemy:
e
w =
w
1
4
1 + cos
2 x
a
1 + cos
2 y
b
;
11
to otrzymujemy przybli·
zenie:
w
1
= 0:0012833
pa
4
D
= 1:0185w
sc
:
Otrzymane rozwi ¾
azanie dla
e
w
daje dobre wyniki równie·
z dla momentów zgi-
naj ¾
acych.
Dla p÷
yty kwadratowej i
= 0:3
otrzymano rozwi ¾
azanie (tabl.35, str.193 w
[15]):
m
x
(0; 0) = 0:0231p
0
a
2
;
m
x
a
2
; 0 =
0:0513p
0
a
2
:
Przyjmuj ¾
ac wspó÷
czynniki w
(i)
j
momenty zginaj ¾
ace wynosz ¾
a:
m
(1)
x
(0; 0) = 0:0276p
0
a
2
;
m
(3)
x
(0; 0) = 0:0228p
0
a
2
;
m
(1)
x
a
2
; 0 =
0:0425p
0
a
2
;
m
(3)
x
a
2
; 0 =
0:0512p
0
a
2
:
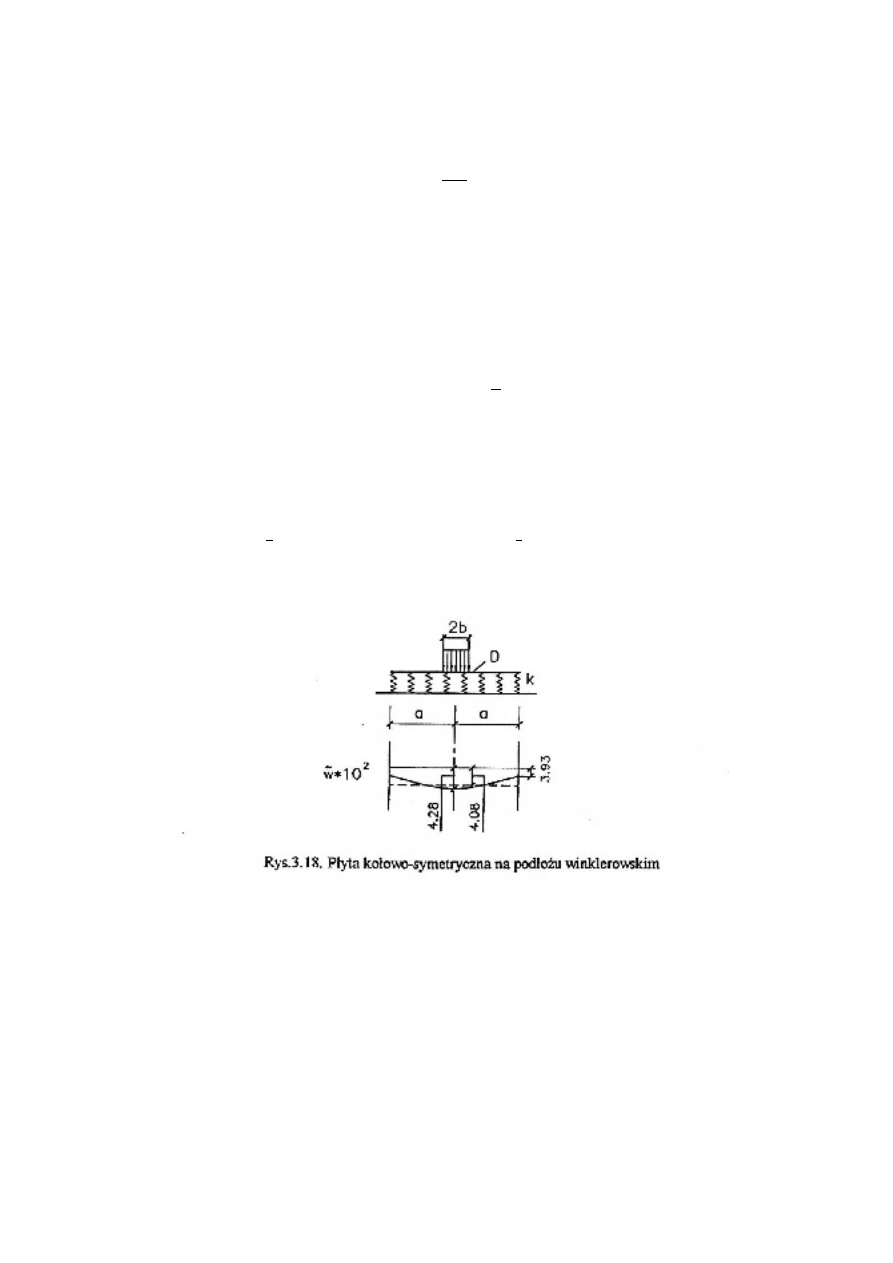
Przyk÷
ad 3.10. P÷
yta ko÷
owa na pod÷
o·
zu winklerowskim (rys. 3.18).
Do
oblicze´n metod ¾
a ortogonalizacji nie mo·
zna przyj ¾
a´c funkcji
e
w
w postaci wielomianu
drugiego stopnia (3.35). Do oblicze´n przyjmujemy ugi ¾
ecie w postaci:
e
w = w
1
+ w
2
r
2
+ w
3
r
4
+ w
4
r
6
:
12
Wspó÷
czynniki w
3
i w
4
obliczamy z warunków brzegowych:
m
r
(a)
D
d
2
e
w
dr
2
+
r
d
e
w
dr
r=a
= 0;
q
r
(a)
D
d
dr
d
2
e
w
dr
2
+
1
r
d
e
w
dr
r=a
= 0:
Z tych równa´n otrzymujemy:
w
3
=
3
4
(1 + )
(2 + )
w
2
a
2
;
w
4
=
1 +
6 (2 + )
w
2
a
4
;
co prowadzi do funkcji
e
w
w postaci:
e
w = w
1
+ w
2
r
2
1
3
4
(1 + )
(2 + )
r
2
a
2
+
1 +
6 (2 + )
r
4
a
4
:
Z warunków ortogonalno´sci obliczamy wspó÷
czynniki a
11
; a
12
; a
22
; b
1
; b
2
wed÷
ug wzorów (3.41). Dochodzimy w ten sposób do uk÷
adu równa´n:
w
1
+
a
2
2
1
5
12
w
2
= pa;
1
5
12
w
1
+
2
3
37
60
+
377
2520
2
+ 1
3
5
16 c a
2
w
2
= pa
2
h
1
2
+
4
6
2
i
;
gdzie pos÷
u·
zono si ¾
e oznaczeniami:
=
1 +
2 +
;
=
b
a
;
c =
D
ka
4
;
p =
qb
2
ka
3
=
P
ka
3
:
Dla danych jak w przyk÷
adzie 3.8, a wi ¾
ec dla
a = 5cm;
c = 1;
= 0;
= 0:3;
p = 8:16 10
3
otrzymujemy:
e
w (0) = w
1
= 4:28 10
2
cm = 0:995w
sc
;
e
w (a) = 3:93 10
2
cm = 1:005w
sc
:
Tak wi ¾
ec wida´c, ·
ze dla analizowanej p÷
yty b÷¾
edy w porównaniu z rozwi ¾
azaniem
13

´scis÷
ym (por. [15], str.246) wynosz ¾
a zaledwie 0.5%. W przyk÷
adzie 3.8, gdzie t ¾
e
sam ¾
a p÷
yt ¾
e analizowali´smy metod ¾
a Ritza, przyjmuj ¾
ac ugi ¾
ecie przybli·
zone (3.35),
b÷¾
ad wynosi÷3%.
Niewielkie ró·
znice mi ¾
edzy ugi ¾
eciami brzegu i ´srodka p÷
yty ´swiadcz ¾
a o do´s´c du·
zej
jej sztywno´sci. Je´sli przyjmiemy D ! 1; to w
2
= 0
i ugi ¾
ecie jest sta÷
e i wynosi
e
w = pa = 4:08 10
2
cm:
Na rys. 3.18 lini ¾
a przerywan ¾
a zaznaczono ugi ¾
ecie p÷
yty sztywnej.
14

Errata przyk÷
ad 3.8:
D
a
R
0
8 (1 + ) w
2
r dr+k
a
R
0
(w
1
r
2
+ w
2
r
4
) r dr =
1
4
ka
4
w
1
+
2
3
+ 16 (1 + )
D
ka
4
a
2
w
2
is true
15
Wyszukiwarka
Podobne podstrony:
Nr ćwiczenia 11, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, 11 Pozio
Fizjologia Cwiczenia 11 id 1743 Nieznany
Biologia Cwiczenia 11 id 87709 Nieznany (2)
cwiczenie 11
sprawko z ćwiczenia 11, Farmacja, II rok farmacji, I semstr, fizyczna, Fizyczna, Sprawozdania z fizy
Patomorfologia cwiczenia ,11,11
MIKROEKONOMIA ĆWICZENIA 5 (11 12 2011)
Obliczenie siły krytycznej metodą energetyczną
cwiczenie 11 id 125145 Nieznany
Cwiczenie 11 Rozklad naprezen pod fundamentem ( )
cwiczenia 11
Ćwiczenia$ 11 OOŚ
Zachowania organizacyjne ćwiczenia( 11
Fizyka- Sprawdzenie prawa Hooke'a, !Nauka! Studia i nie tylko, Fizyka, Ćwiczenie 11 - moduł Younga
rys, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, 11 Poziomy energetyc
cwiczenie 11, GRUNTOZNASTWO, Gruntoznawstwo, Grunty 2 (mrr mrr)
więcej podobnych podstron