
34
Modyfikacje algorytmu PID
• Uwzględnienie ograniczeń sygnału
sterującego – unikanie nasycenia
• Kompensacja mierzalnych zakłóceń
• Nieczułość na szumy pomiarowe
• Odporność na duże zmiany wartości
zadanej
• Tryb ręczny
35
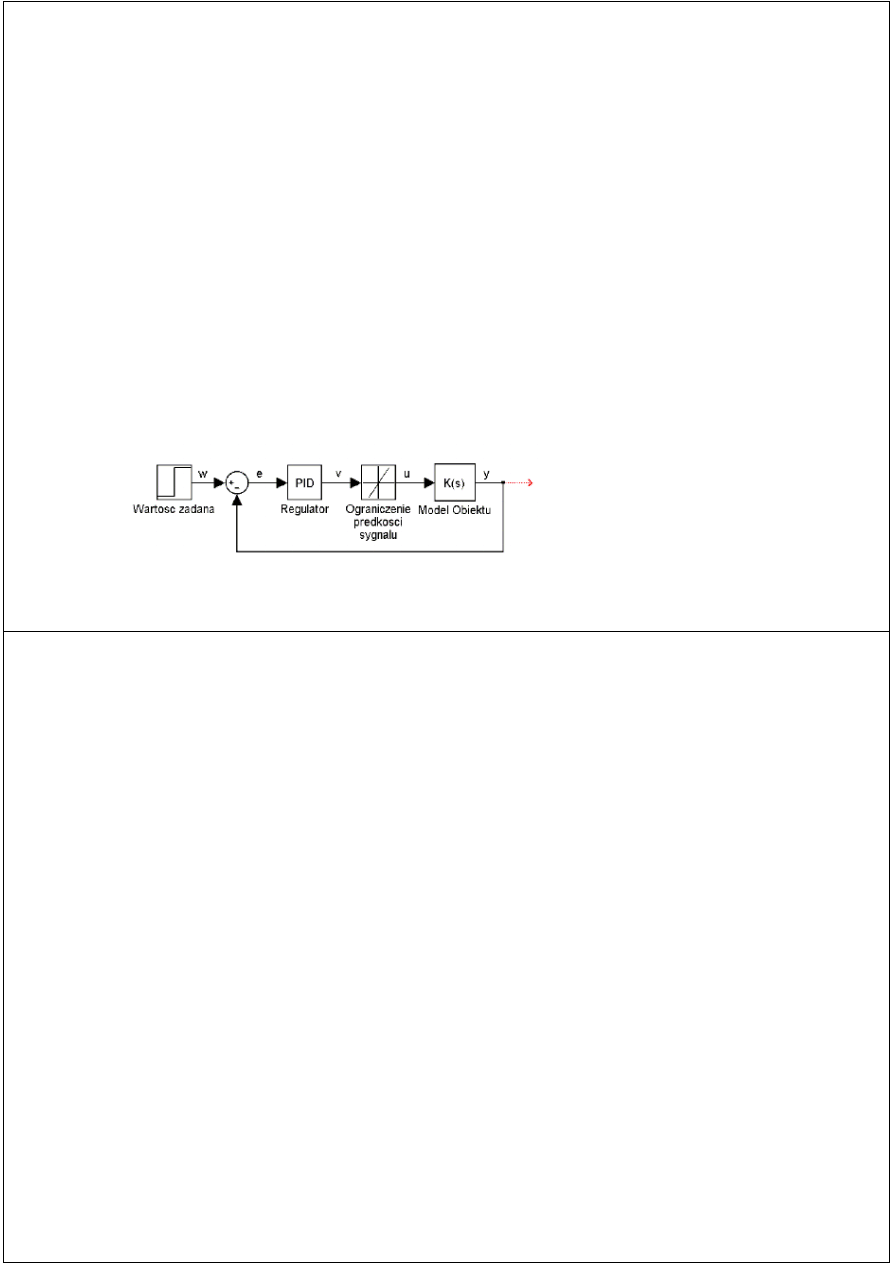
Ograniczenie sygnału sterującego
• W większości stosowanych układów sterowania sygnał sterujący
posiada górne oraz dolne ograniczenie. Może ono wynikać np. z
fizycznych właściwości urządzenia sterującego. Najprostszym
takim urządzeniem jest zawór, który znajduje się w stanie
górnego nasycenia w momencie, w którym jest całkowicie
otwarty, natomiast, gdy jest zamknięty, znajduje się on w stanie
dolnego nasycenia.
• Wprowadzenie ograniczenia na sygnał sterujący powoduje
znaczne zwiększenie przeregulowania, a także wydłużenie czasu
regulacji (czasu, po którym układ osiąga stan ustalony). Zjawisko
to określane jest w literaturze jako windup.
36
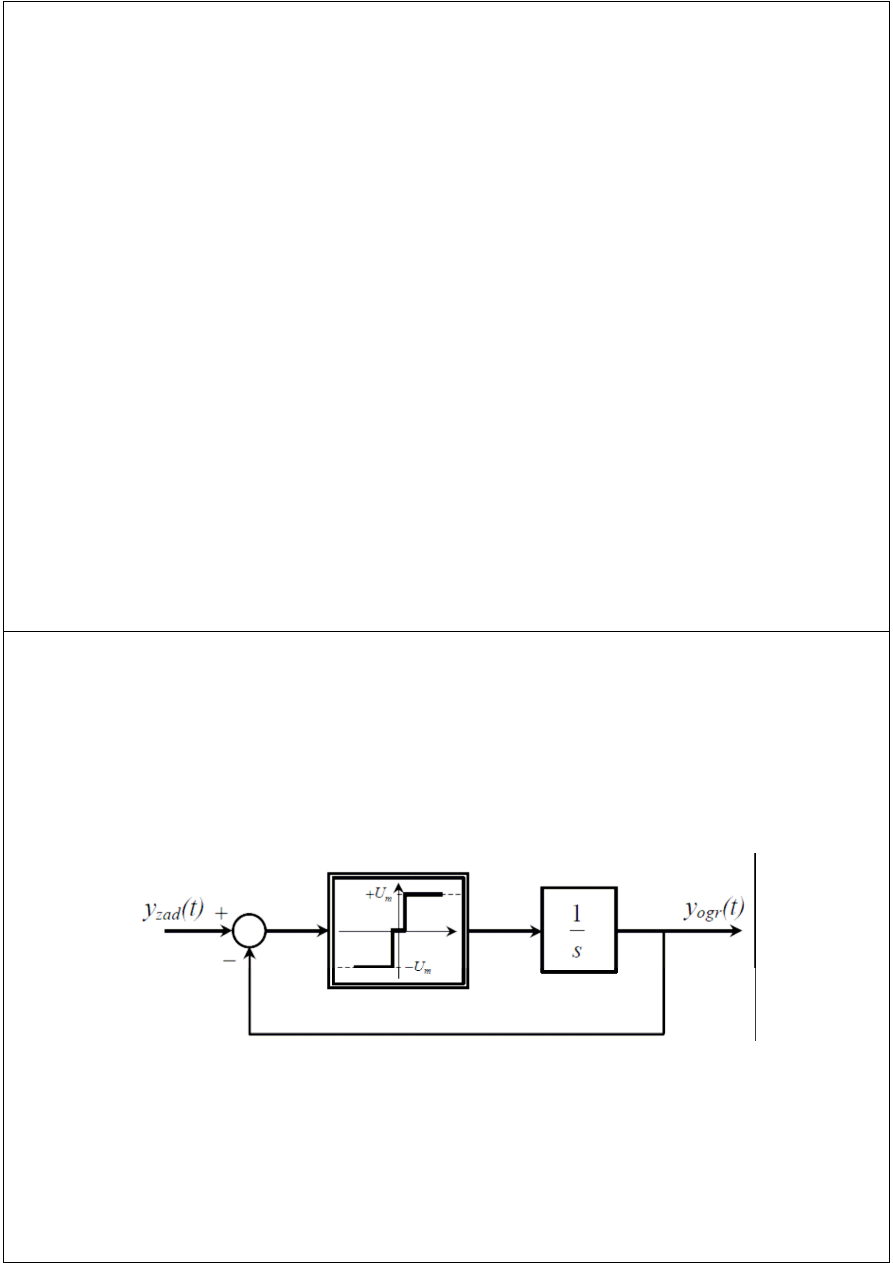
Ograniczenie prędkości sygnału sterującego
• Układ przedstawiony poniżej prezentuje inny przypadek
powstawania zjawiska windup’u, w którym ograniczona została
szybkość zmian sygnału sterującego. Ograniczenie to może
wystąpić, np. w przypadku, gdy regulator wystawia sygnał
zmieniający się z szybkością większą niż fizyczna możliwość
prędkości otwierania lub zamykania zaworu.
• Ograniczenie skutkuje tym, że aktualne sterowanie jest wiernie
realizowane przez urządzenie wykonawcze. Modyfikowana bywa
też wartość całki uchybu, aby uniknąć niespójności w pracy
algorytmu PID.
37
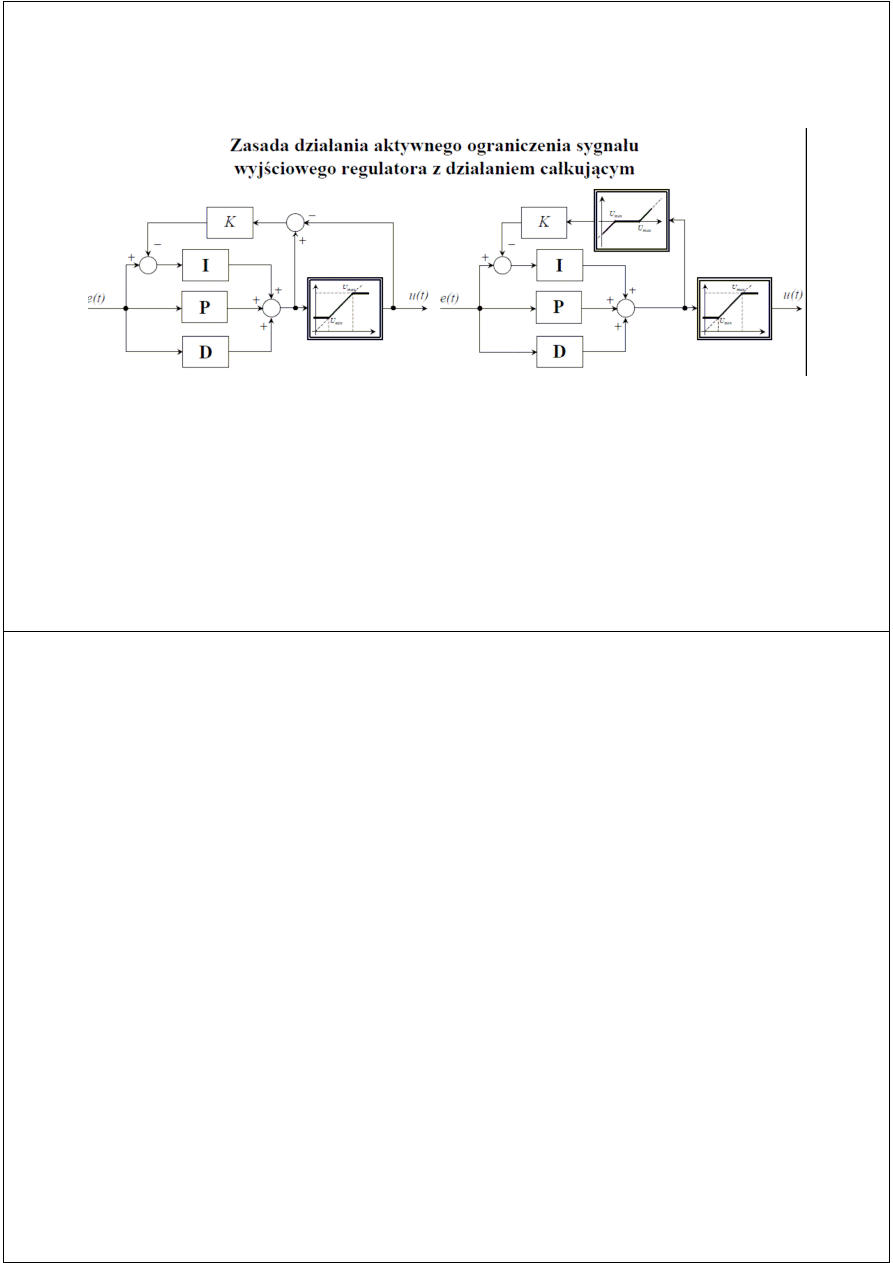
Metody unikania zjawiska windup
Efekt zjawiska likwiduje się poprzez ograniczenie działania
członu całkującego:
• wyłączenie działania członu całkującego, jeśli składowa
całkująca przekracza ograniczenie
• wyłączenie działania członu całkującego, sygnał
wyjściowy z regulatora przekracza ograniczenie
• ograniczanie sygnału wyjściowego z regulatora poprzez
silne ujemne sprzężenie zwrotne w torze całkującym
regulatora, kiedy sygnał dojdzie do ograniczenia
• ograniczanie sygnału wyjściowego z regulatora poprzez
silne ujemne sprzężenie zwrotne działające na wszystkie
składowe regulatora, kiedy sygnał dojdzie do
ograniczenia
38
Ograniczanie całkowania
39
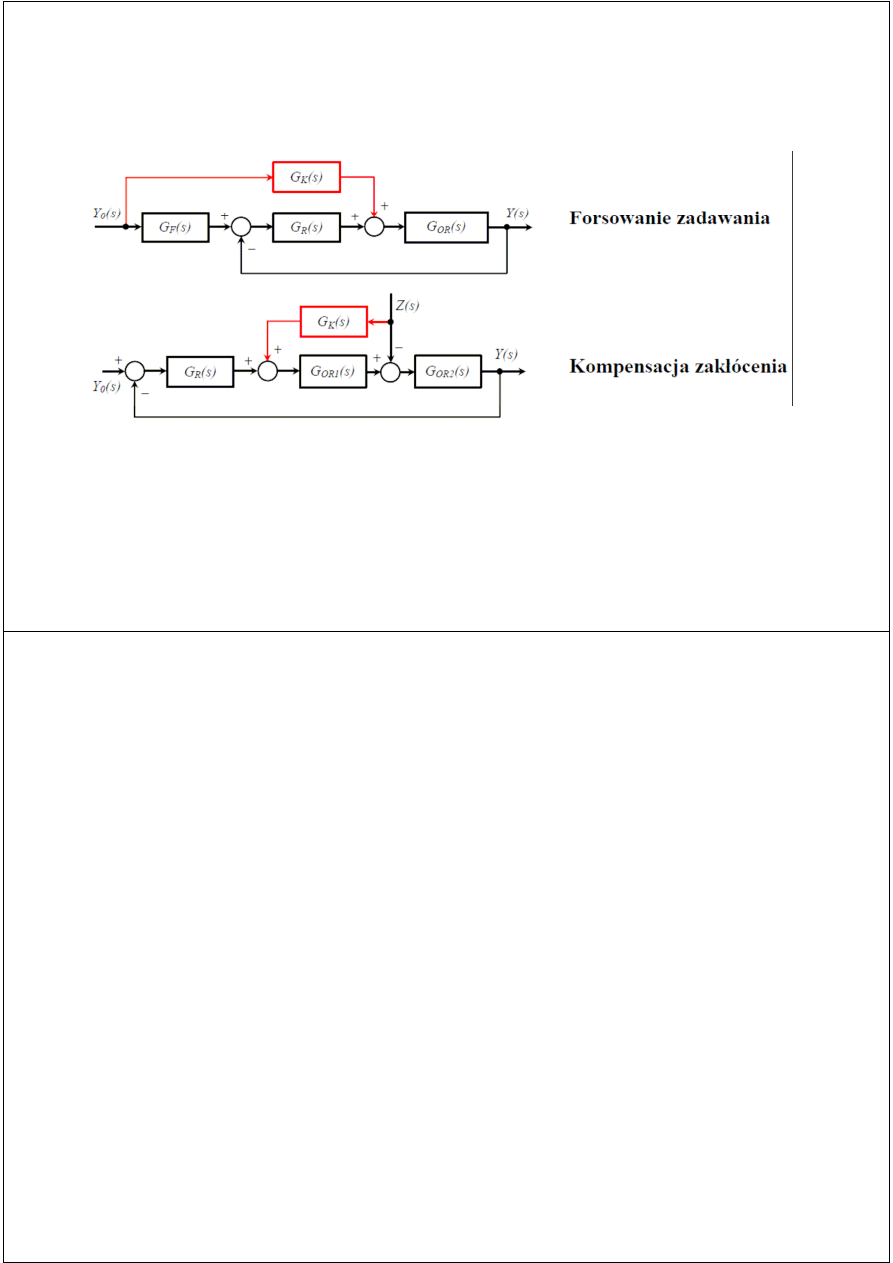
Kompensacja zakłóceń
• W niektórych układach możliwy jest pomiar zakłóceń, które
oddziałują na obiekt. Znając ich przebieg, można tak wpływać na
pracę regulatora, aby ten wyprzedzał swoje działanie względem
uzyskania informacji przez sygnał uchybu.
• Możliwe jest zastosowanie dodatkowego działania na obiekt dla
mierzonych własności zakłócenia (np. w głównym torze jest
regulator PI, a kompensacja zakłócenia przebiega wg algorytmu
PD lub PID
• W niektórych regulatorach stosuje się dodatkowy parametr
„bias” – możliwość dodania określonej wartości do sterowania –
np. z działania dodatkowego regulatora
• Powyższe działania określane są jako sprzężenie „w przód”
• Obok kompensacji zakłóceń stosuje się kompensację zmian
wartości zadanej
40
Sprzężenie „w przód”
41
Nieczułość na szumy pomiarowe
• Człon D różniczkuje sygnał e(t), który nie jest wolny od
zakłóceń w postaci szumów. Wskutek tego nawet
niewielkie zmiany, ale następujące w krótkich
odstępach czasu, powodują powstawanie na wyjściu
krótkotrwałych znacznych wartości pochodnych.
• Aby uniknąć tego efektu stosuje się:
– filtrowanie sygnału wielkości mierzonej lub sygnału uchybu
– wprowadzenie strefy nieczułości – pewnego obszaru
zmienności e(t), na którą nie będzie reagował człon
różniczkujący lub wszystkie człony regulatora
42
Zmiany wartości zadanej
• W układach regulacji stałowartościowej sporadycznie pojawia się
potrzeba zmiany wielkości wartości zadanej. Mogą one
spowodować:
– krótkotrwałe bardzo duże wielkości składowej różniczkującej wskutek
szybkiej zmiany sygnału uchybu
– zwiększanie się składowej całkującej wskutek powstałego dużego uchybu
– w wyniku powyższych – dużych wartości sygnału sterującego, najczęściej
sięgających ograniczeń
• Sposoby unikania powyższych efektów:
– filtrowanie wartości zadanej
– ograniczenie wielkości zmian w czasie wartości zadanej
– wyłączanie akcji różniczkującej lub/i całkującej na czas zmian wartości
zadanej
– różniczkowanie tylko wartości wyjścia obiektu y(t), a nie uchybu e(t)
43
Filtrowanie wartości zadanej
44
Wspomaganie trybu ręcznego
• Przełącznik – tryb ręczny / tryb automatyczny
• W trybie ręcznym może działać ogranicznik poziomu i
prędkości sygnału sterującego
• Zmiana trybu na automatyczny może powodować duży
skok sterowania – na czas trwania trybu ręcznego
wyłącza się całkowanie
• Likwidacja dużego skoku sterowania – bezuderzeniowy
tryb ręczny
45
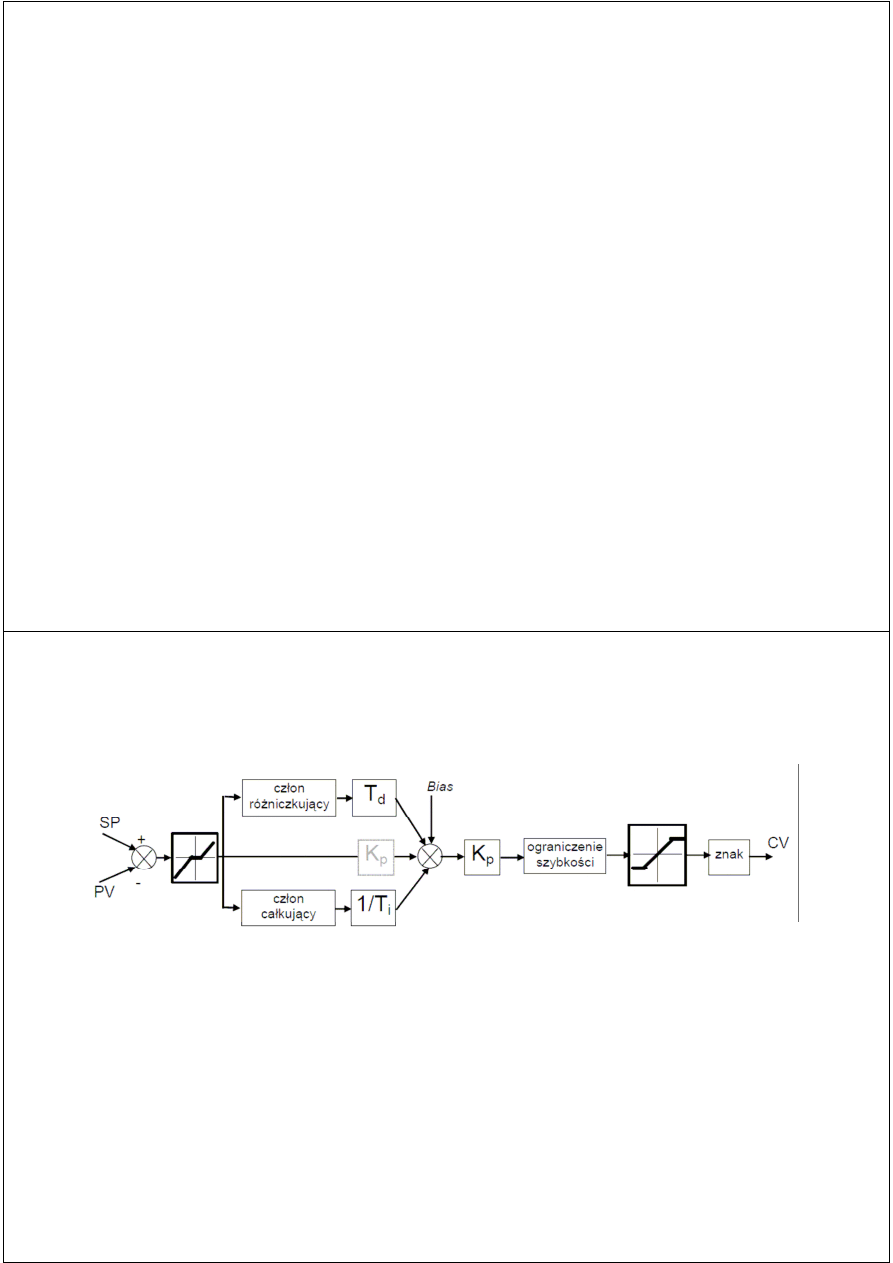
Model regulatora z modyfikacjami
Modyfikacje pokazane na schemacie:
• Ograniczenie wartości sygnału
sterującego
• Ograniczenie szybkości sygnału
sterującego
• Strefa nieczułości na wejściu
• Wartość dodawana do sygnału
sterującego (Bias) do sprzężeń „w
przód”
• Zmiana znaku sygnału sterującego
Nie uwzględniono:
• Wyłączania członu całkującego
• Ograniczeń w różniczkowaniu
• Trybu ręcznego
• Filtrowania
Wyszukiwarka
Podobne podstrony:
03 przewody kableid 4457 Nieznany (2)
03 lokalne strategie zapewnieni Nieznany (2)
2009 03 26 prezentacja pochodne Nieznany
2010 03 Urazy sportoweid 26986 Nieznany (2)
03 stale i staliwa niestopoweid Nieznany (2)
ei 2005 03 s024 id 154147 Nieznany
17 03 2014 Jaskowskaid 17194 Nieznany (2)
03 Stosowanie norm w produkcji Nieznany (2)
03 Stosowanie przepisow bezpiec Nieznany
Notatki 03 PRODUKT id 322319 Nieznany
Lab 03 Analiza obwodu elektrycz Nieznany
10 03 2013 Wid 10701 Nieznany
22 03 2011 CAid 29468 Nieznany (2)
03 Zrodla Prawaid 4162 Nieznany (2)
ei 2005 03 s006 id 154146 Nieznany
cw 03 formularz id 121361 Nieznany
03 kompetencje personelu kolejo Nieznany (2)
więcej podobnych podstron