
POMIARY KIERUNKÓW I
WYZNACZENIE KĄTÓW
POZIOMYCH
- Pomiary kierunków i wyznaczenie kątów poziomych -
KĄT POZIOMY
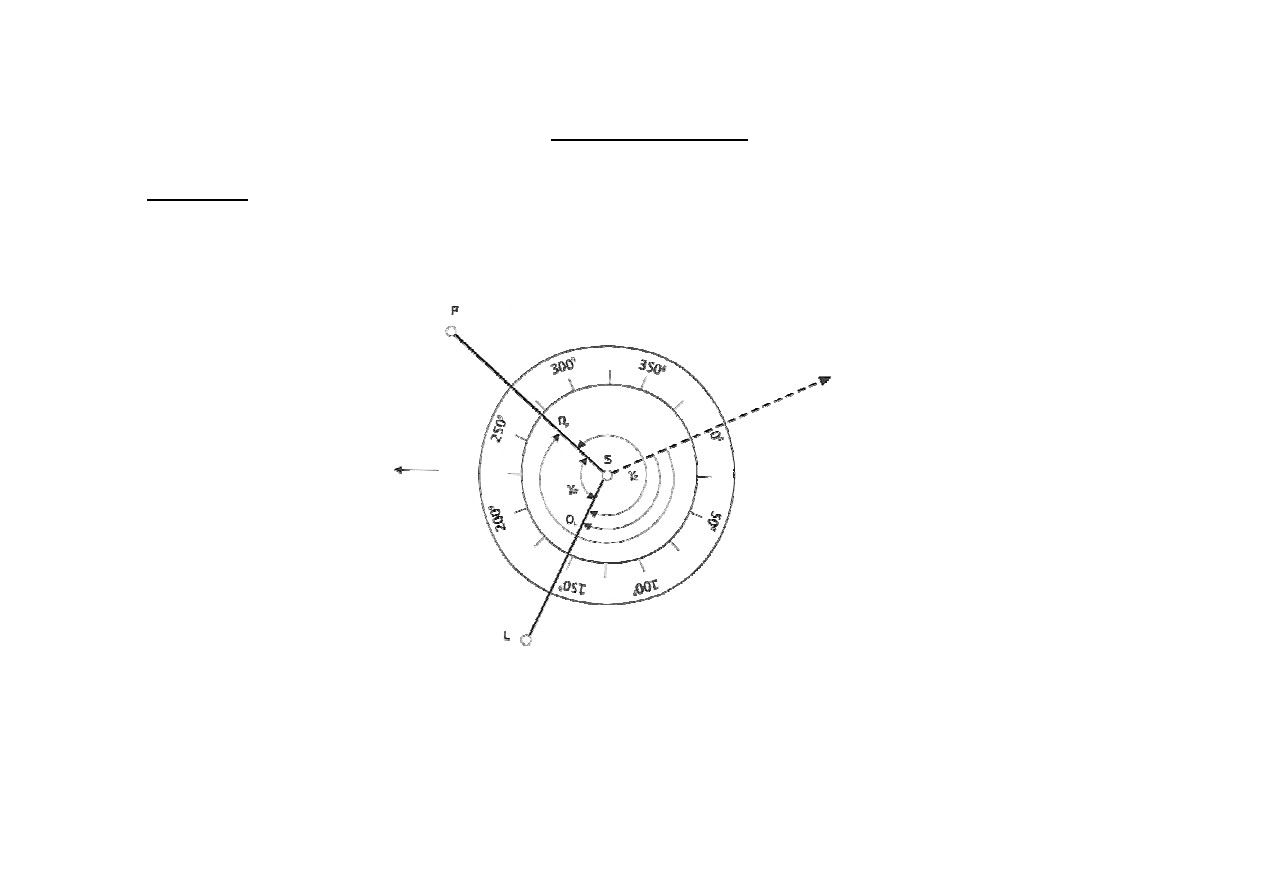
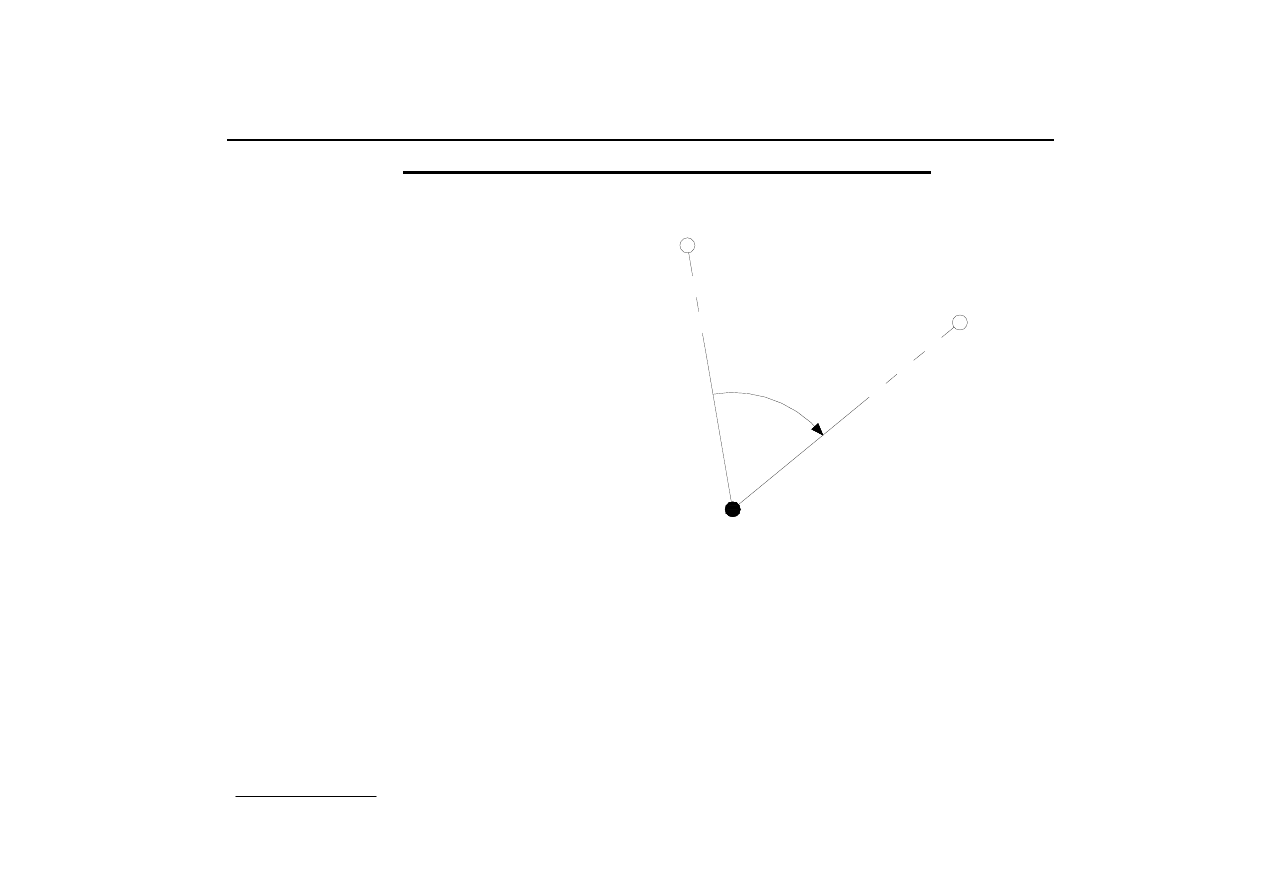
Definicja – kąt poziomy wyznaczany jest przez ślady przecięcia dwóch płaszczyzn pionowych
przechodzących przez oś celową i obserwowane punkty z poziomą płaszczyzną
limbusa. Płaszczyzny celowania powinny przecinać
się
wzdłuż
prostej
pokrywającej się z osią pionową instrumentu
L
P
W
O
O
−
=
γ
P
L
Z
O
O
−
=
γ
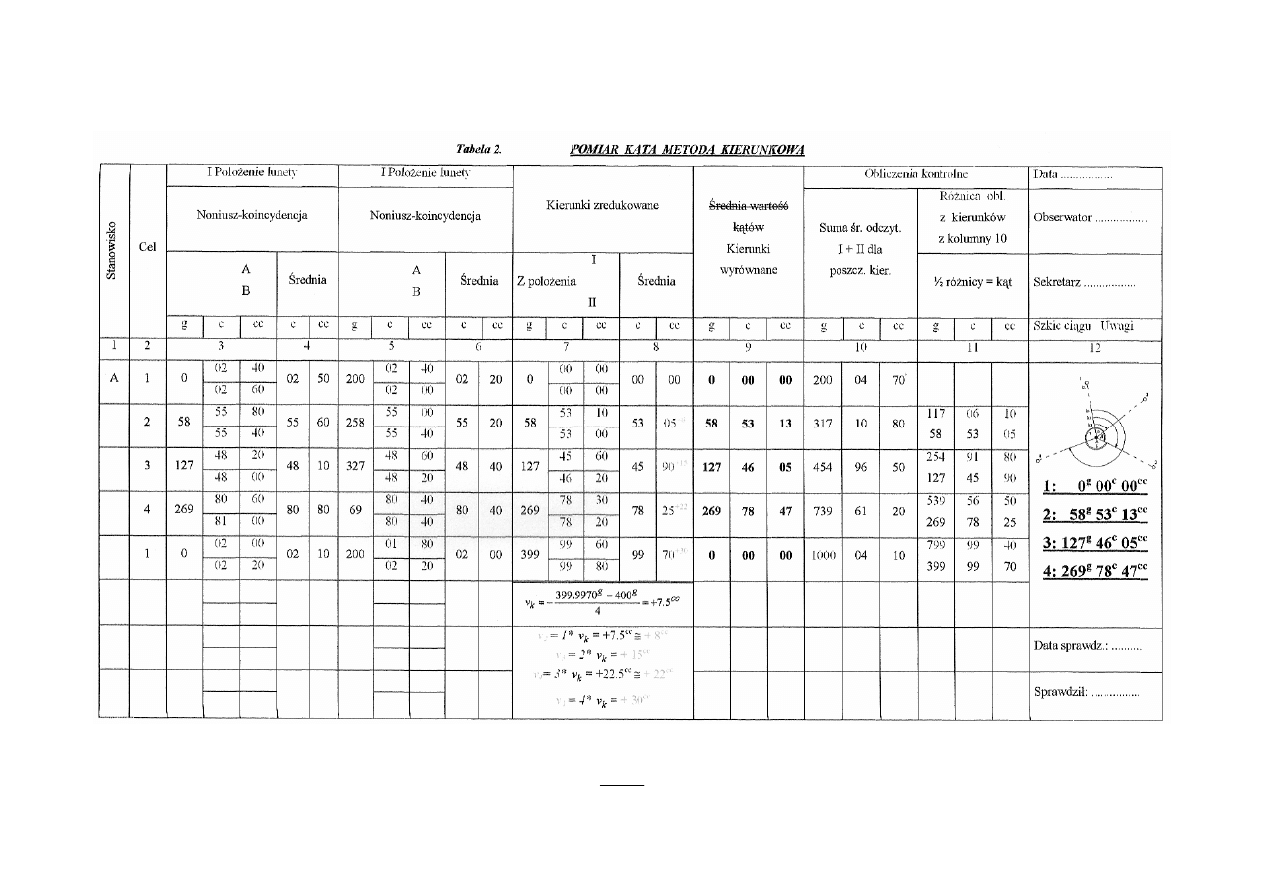
WYZNACZENIE KĄTA POZIOMEGO NA PODSTAWIE POMIARU
KIERUNKÓW WYKONANEGO METODĄ:
- Pomiary kierunków i wyznaczenie kątów poziomych -
1.
ZWYKŁĄ
2.
REPETYCYJNĄ
3.
WIELOSERYJNĄ
4.
KIERUNKOWĄ
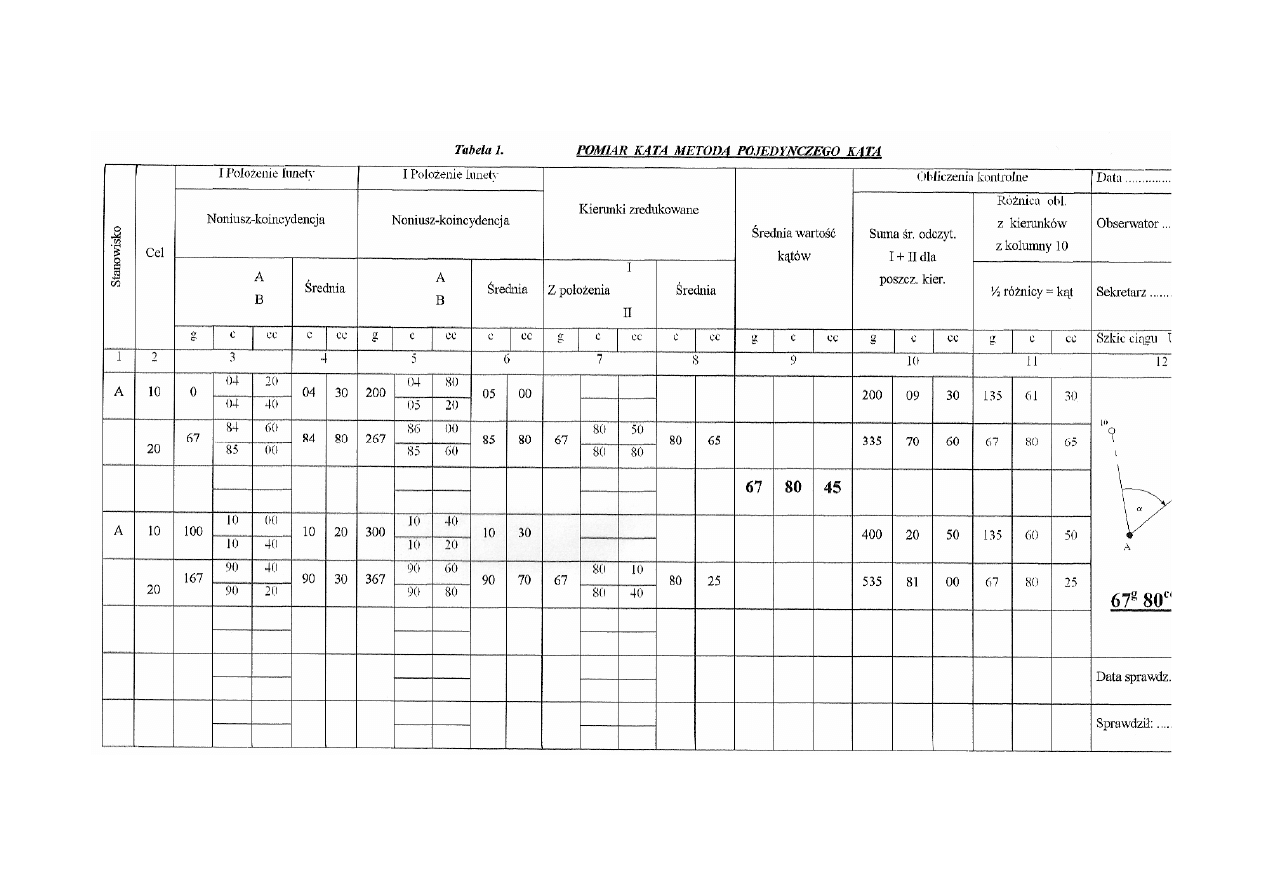
Po dokładnym ustawieniu teodolitu (Theo 020) nad punktem (stanowiskiem) A musimy
określić w ilu seriach będzie mierzony dany kąt
α
. Seria jest to pomiar kąta w 2
położeniach lunety, przy czym pierwsze położenie lunety jest wówczas, gdy krąg pionowy
znajduje się po lewej stronie lunety. Określenie liczby serii jest ważne, gdyż w zależności
od tej liczby serii, obliczamy o jaką wartość O
s
należy zmieniać odczyt początkowy na
limbusie przy rozpoczęciu pomiaru dla każdej serii. Wartość tą obliczamy z wzoru:
10
20
A
α
(
)
n
O
g
s
200
lub
180
0
=
Załóżmy, że chcemy dokonać pomiaru kąta w n=2 seriach
- Pomiary kierunków i wyznaczenie kątów poziomych -
- Pomiary kierunków i wyznaczenie kątów poziomych -
1.
Ustawiamy na limbusie odczyt równy w przybliżeniu 0
g
i zaciskamy sprzęg repetycyjny.
2.
Celujemy na lewe ramię kąta
3.
Wykonujemy odczyt z kręgu poziomego Hz i zapisujemy w dzienniku pomiarowym, po czym
zwalniamy sprzęg repetycyjny
4.
Poruszamy lekko leniwką poziomą aby siatka celownicza zmieniła swoje położenie a
następnie ponownie celujemy leniwką poziomą na nasz punkt, po czym wykonujemy drugi
odczyt z kręgu poziomego Hz
5.
Celujemy na prawe ramię kąta i wykonujemy odczyt z kręgu poziomego. Wykonujemy
czynności jak w punkcie 4. W ten sposób wykonaliśmy pomiar kąta w I położeniu lunety
6.
Teraz wykonujemy pomiar kąta w II położeniu lunety. Obracamy lunetę przez zenit (wokół
własnej poziomej osi obrotu), alidadę obracamy o 180
0
i celujemy na prawe ramię kąta
wykonując odczyt z kręgu poziomego Hz. Wykonujemy czynności jak w punkcie 4
7.
Celujemy na lewę ramię kąta i wykonujemy odczyt. Wykonujemy czynności jak w punkcie 4
8.
Wykonujemy te same czynności co punktach 1-7 w drugiej serii pomiaru kąta z wyjątkiem
ustawienia innej wartości odczytu na limbusie przy pierwszym wycelowaniu na lewe ramię
kąta (wzór)
Czynności pomiarowe na stanowisku:
- Pomiary kierunków i wyznaczenie kątów poziomych -
cc
k
k
n
f
v
5
.
7
+
=
−
=

- Pomiary kierunków i wyznaczenie kątów poziomych -
1.
Ustawiamy na limbusie odczyt równy w przybliżeniu 0
g
i zaciskamy sprzęg repetycyjny.
2.
Celujemy na pierwszy kierunek
3.
Wykonujemy odczyt z kręgu poziomego Hz i zapisujemy w dzienniku pomiarowym, po czym
zwalniamy sprzęg repetycyjny
4.
Poruszamy lekko leniwką poziomą aby siatka celownicza zmieniła swoje położenie a
następnie ponownie celujemy leniwką poziomą na nasz kierunek, po czym wykonujemy drugi
odczyt z kręgu poziomego Hz
5.
Celujemy na drugi kierunek i wykonujemy odczyt z kręgu poziomego. Wykonujemy
czynności jak w punkcie 4.
6.
Celujemy na trzeci kierunek i wykonujemy odczyt z kręgu poziomego. Wykonujemy
czynności jak w punkcie 4.
7.
Celujemy na czwarty kierunek i wykonujemy odczyt z kręgu poziomego. Wykonujemy
czynności jak w punkcie 4.
8.
Celujemy ponownie na pierwszy kierunek (tzw. zamknięcie horyzontu) i wykonujemy odczyt
z kręgu poziomego. Wykonujemy czynności jak w punkcie 4. W ten sposób wykonaliśmy
pomiar kierunków w I położeniu lunety
9.
Teraz wykonujemy pomiar kierunków w II położeniu lunety. Obracamy lunetę przez zenit
(wokół własnej poziomej osi obrotu), alidadę obracamy o 180
0
i celujemy na pierwszy
kierunek wykonując odczyt z kręgu poziomego Hz. Wykonujemy czynności jak w punkcie 4
Czynności pomiarowe na stanowisku:

10.
Celujemy na czwarty kierunek i wykonujemy odczyt. Wykonujemy czynności jak w punkcie 4
11.
Celujemy na trzeci kierunek i wykonujemy odczyt. Wykonujemy czynności jak w punkcie 4
12.
Celujemy na drugi kierunek i wykonujemy odczyt. Wykonujemy czynności jak w punkcie 4
13.
Celujemy na pierwszy kierunek (tzw. zamknięcie horyzontu) i wykonujemy odczyt.
Wykonujemy czynności jak w punkcie 4
14.
Wykonujemy te same czynności co punktach 1-13 w drugiej serii pomiaru kierunków z
wyjątkiem ustawienia innej wartości odczytu na limbusie przy pierwszym wycelowaniu na
pierwszy kierunek (wzór)
- Pomiary kierunków i wyznaczenie kątów poziomych -
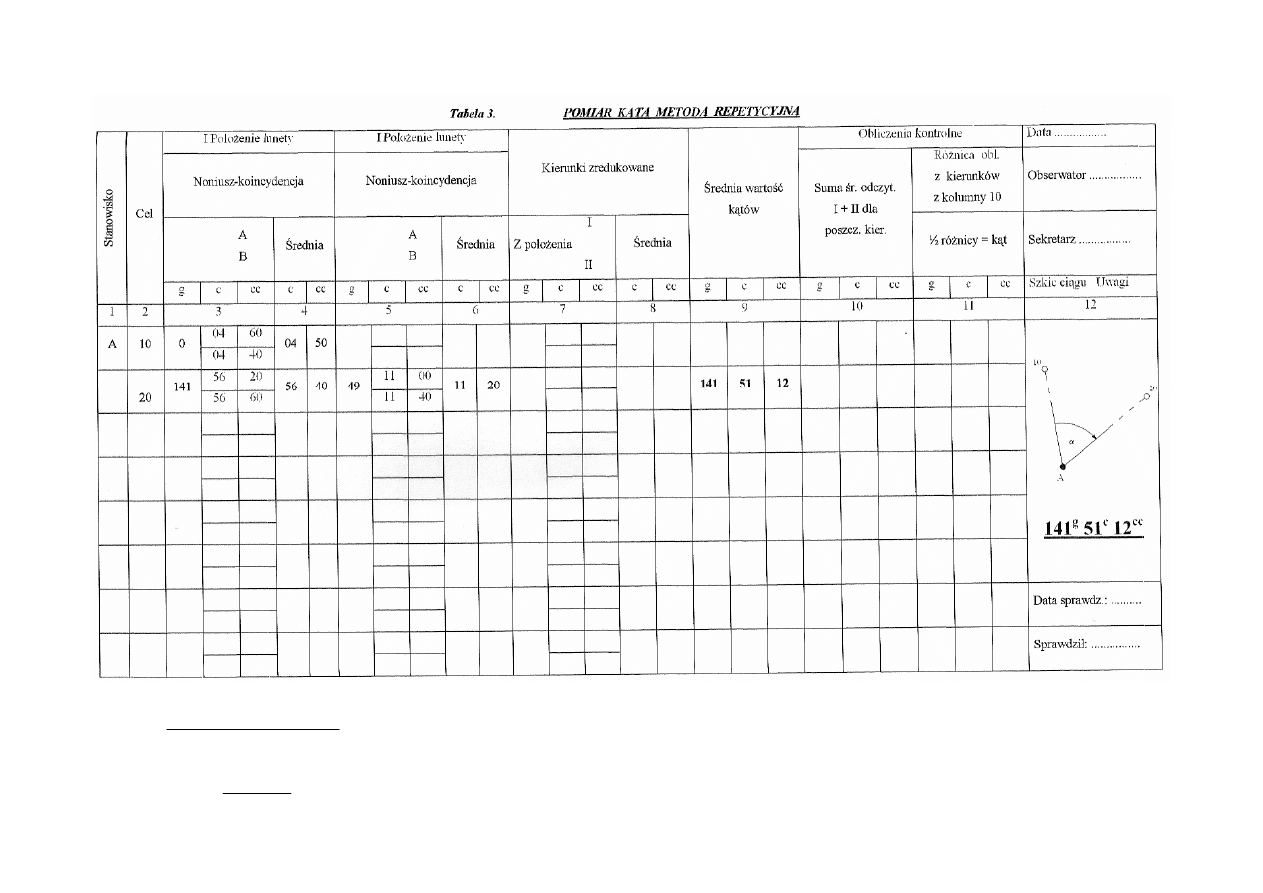
- Pomiary kierunków i wyznaczenie kątów poziomych -
cc
c
g
g
I
L
II
P
n
m
O
O
12
51
141
400
=
•
+
−
=
α
O
L
I
- średnia wartość odczytu na lewym ramieniu kąta (punkt 10) w I położeniu lunety
O
P
II
- średnia wartość odczytu na prawym ramieniu kąta (punkt 20) w II położeniu lunety
n – liczba repetycji z I i II położenia lunety (w naszym przypadku n=6)
m – liczba pełnych obrotów limbusa, obliczana z wzoru
2
400
.
=
•
=
g
prz
n
m
α

- Pomiary kierunków i wyznaczenie kątów poziomych -
Czynności pomiarowe na stanowisku:
1.
Ustawiamy na limbusie odczyt równy w przybliżeniu 0
g
i zaciskamy sprzęg repetycyjny.
2.
Celujemy na lewe ramię kąta
3.
Wykonujemy odczyt z kręgu poziomego Hz i zapisujemy w dzienniku pomiarowym, po czym
zwalniamy sprzęg repetycyjny
4.
Poruszamy lekko leniwką poziomą aby siatka celownicza zmieniła swoje położenie a
następnie ponownie celujemy leniwką poziomą na nasz punkt, po czym wykonujemy drugi
odczyt z kręgu poziomego Hz
5.
Celujemy na prawe ramię kąta i wykonujemy tzw. odczyt przybliżony z kręgu poziomego
zapisując jego wartość w dzienniku pomiarowym. Wykonujemy czynności jak w punkcie 4.
Zaciskamy sprzęg reptycyjny
6.
Celujemy na lewe ramię kąta (przy zaciśniętym sprzęgu repetycyjnym)
7.
Zwalniamy sprzęg repetycyjny i celujemy na prawe ramię kąta. Zaciskamy sprzęg reptycyjny
8.
Celujemy na lewe ramię kąta (przy zaciśniętym sprzęgu repetycyjnym)
9.
Zwalniamy sprzęg repetycyjny i celujemy na prawe ramię kąta. Zaciskamy sprzęg reptycyjny.
W ten sposób odłożyliśmy trzykrotnie tą samą wartość kąta na limbusie a więc dokonaliśmy
trzech repetycji w I położeniu lunety
10.
Obracamy lunetę przez zenit i celujemy na lewe ramię kąta (przy zaciśniętym sprzęgu
repetycyjnym) – nie dokonujemy odczytu
11.
Zwalniamy sprzęg repetycyjny i celujemy na prawe ramię kąta. Zaciskamy sprzęg reptycyjny

12.
Celujemy na lewe ramię kąta (przy zaciśniętym sprzęgu repetycyjnym)
13.
Zwalniamy sprzęg repetycyjny i celujemy na prawe ramię kąta. Zaciskamy sprzęg reptycyjny
14.
Celujemy na lewe ramię kąta (przy zaciśniętym sprzęgu repetycyjnym)
15.
Zwalniamy sprzęg repetycyjny i celujemy na prawe ramię kąta. Dokonujemy odczytu z kręgu
poziomego. W ten sposób odłożyliśmy trzykrotnie tą samą wartość kąta na limbusie w II
położeniu lunety
- Pomiary kierunków i wyznaczenie kątów poziomych -
- Pomiary kierunków i wyznaczenie kątów poziomych -
Metoda wieloseryjna – polega na kilkakrotnym pomiarze kąta w obu położeniach lunety
przy niezależnych odczytach kierunków i wycelowaniach a także niezależnym centrowaniu i
poziomowaniu przy każdej serii
Zasadnicze źródła błędów pomiarów kątowych
1.
Czynniki instrumentalne
2.
Czynniki osobowe
3.
Czynniki związane z warunkami
zewnętrznymi
Czynniki instrumentalne
-Eliminujemy przez: rektyfikację, sposób pomiaru (2 położenia lunety), pomiar w wielu
seriach, celowanie środkiem krzyża kresek (unikamy błędu skręcenia siatki celowniczej)
-Błąd niepionowości osi głównej instrumentu (niedokładność poziomowania libeli,
niedokładność rektyfikacji libeli, naruszenie poziomowania w trakcie pomiaru, niestabilność
osi alidady w tulei limbusa lub spodarki przy obrocie instrumentu wokół tej osi)
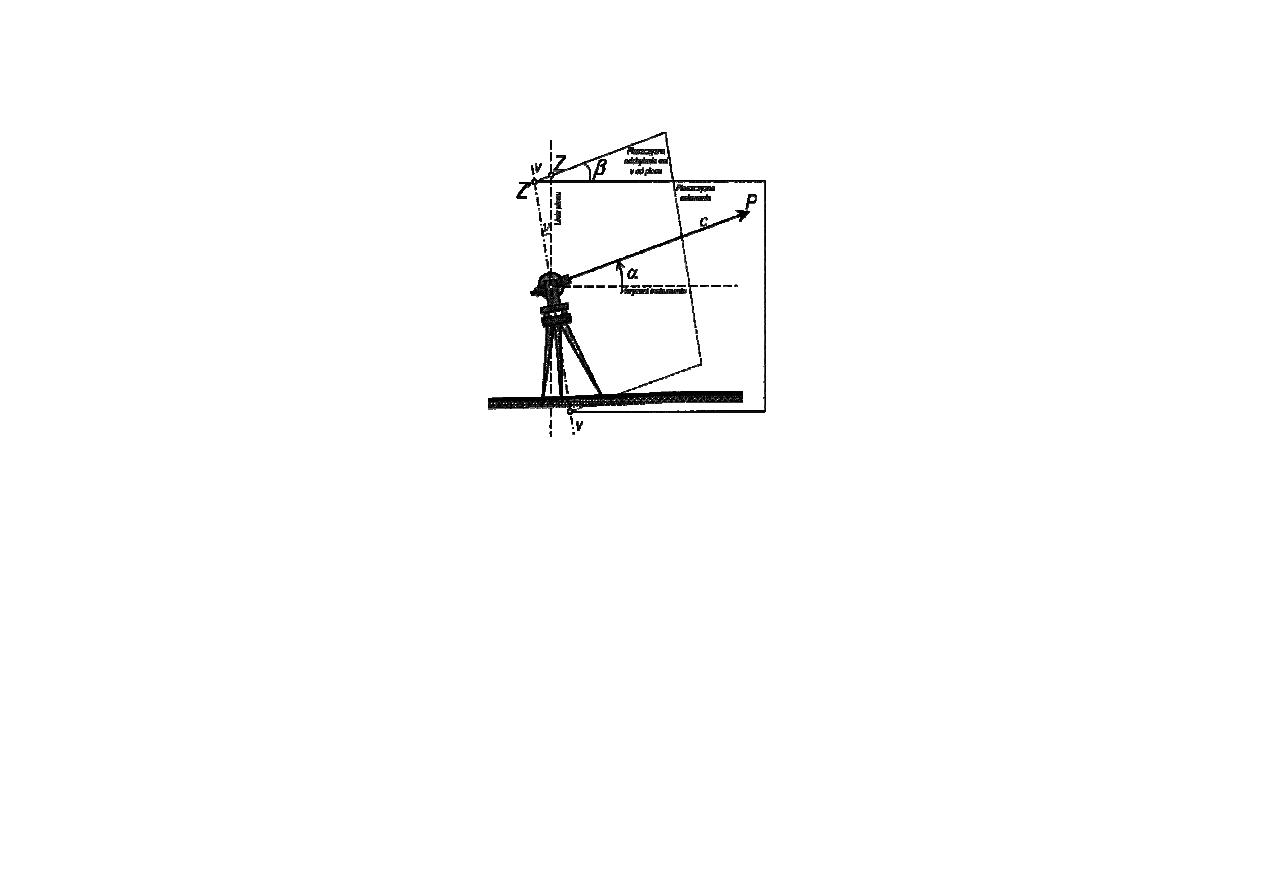
- Pomiary kierunków i wyznaczenie kątów poziomych -
β
α
ε
sin
''
''
⋅
⋅
=
tg
v
v
''
v
ε
''
v
α
β
- wychylenie osi głównej instrumentu od pionu
- kąt nachylenia osi celowej do poziomu
- wpływ wychylenia osi głównej instrumentu od pionu na wartość pomierzonego kąta poziomego
- kąt dwusieczny pomiędzy płaszczyzną wychylenia osi obrotu instrumentu od pionu a płaszczyzną
celową

- Pomiary kierunków i wyznaczenie kątów poziomych -
Ekstrema wpływu wychylenia osi głównej instrumentu od pionu
na wartość pomierzonego kąta poziomego
0
''
max
90
=
−
α
ε
gdy
v
0
0
''
min
0
lub
0
=
=
−
β
α
ε
gdy
v
α
ε
tg
v
v
⋅
=
''
''
max
0
90
=
β
0
0
=
α
0
0
=
β
- strome celowe
- gdy oś celowa jest pozioma
Dla rozważań praktycznych przyjmuje się
Czynniki osobowe
-Błędy odczytu
-Błędy celowania
-Błędy centrowania teodolitu i sygnału
Czynniki związane z warunkami zewnętrznymi
- refrakcja powietrza
- wibracja
- oświetlenie sygnałów
- nasłonecznienie
- deszcz
- mgła
- wiatry
- Pomiary kierunków i wyznaczenie kątów poziomych -
Analiza wpływu metody pomiaru na dokładność wyników
Czynniki osobowe
-Błędy celowania m
c
-Błędy odczytu m
o
-Błędy centrowania teodolitu i sygnału m
e
Metoda zwykła
1
2
k
k
−
=
α
2
1
1
1
II
I
k
k
k
+
=
2
2
2
2
II
I
k
k
k
+
=
)
(
2
1
1
1
2
2
II
I
II
I
k
k
k
k
−
−
+
=
α
k
m
m
=
α
2
2
2
o
c
k
m
m
m
+
=
2
2
2
e
o
c
m
m
m
M
+
+
=
α
gdzie
więc
Zakładając jednakowe błędy wszystkich kierunków
Zakładając, że błąd kierunku zależy tylko od
błędów celowania i odczytu
Uwzględniając także w ostatecznym średnim
błędzie kąta również błąd centrowania
- Pomiary kierunków i wyznaczenie kątów poziomych -
Metoda repetycyjna
n
n
n
α
α
α
α
α
+
+
+
+
=
−
1
2
1
...
2
2
2
2
1
2
1
...
1
n
n
m
m
m
m
n
m
α
α
α
α
α
+
+
+
+
=
−
2
2
2
2
2
1
c
o
m
m
m
m
n
=
=
=
α
α
2
2
2
...
1
2
c
m
m
m
n
=
=
=
−
α
α
2
2
2
2
1
c
o
nm
m
n
m
+
=
α
+
=
2
2
2
c
o
m
n
m
n
m
α
2
2
2
2
e
c
o
m
m
n
m
n
M
+
+
=
α
więc
Kąt pierwszy i ostatni obarczony jest błędem odczytu jednego
kierunku i błędami celowania obu kierunków
Pozostałe kąty obarczone są tylko błędami celowania dla obu
kierunków
Podstawiając te dwie zależności do wzoru na błąd kąta
lub
Uwzględniając także w ostatecznym średnim
błędzie kąta również błąd centrowania
- Pomiary kierunków i wyznaczenie kątów poziomych -
Metoda wieloseryjna
Ś
redni błąd kąta w s seriach
(
)
2
2
2
1
e
o
c
m
m
m
s
M
+
+
=
α
Wnioski
1.
W metodzie repetycyjnej w stosunku do zwykłej występuje znaczne zmniejszenie błędu
odczytywania - błąd ten jest mniejszy n razy
2.
W metodzie repetycyjnej w stosunku do zwykłej następuje zmniejszenie błędu celowania o
n
3.
W metodzie wieloseryjnej pomiaru pojedynczego kąta występuje
s
krotne zmniejszenie
błędów: celowania, odczytywania i centrowania, wynikające z wielokrotności pomiarów
4.
W metodzie repetycyjnej wpływ błędu centrowania na średni błąd pomiaru kąta jest taki
sam jak w metodzie zwykłej a w wieloseryjnej s razy mniejszy.
Wyszukiwarka
Podobne podstrony:
Pomiarydc id 374638 Nieznany
pomiary kierunków pionowych4
PL UE kroki w kierunku integrac Nieznany
3 pomiar czestotliwosci fazy c Nieznany
cw01 pomiar czestotliwosci id 1 Nieznany
44 pomiar nagrzewnicy powietrza Nieznany (2)
17 Wpływ błędów instrumentalnych teodolitu na pomiar kierunków i kątów
zasadnicze kierunki wspolczesne Nieznany
dyfrakcja pomiar dlugosci fali Nieznany
1 pomiary i jednostki fizycznei Nieznany (2)
Pomiary reczne i automatyczne n Nieznany
Niepewnosci pomiaru id 319236 Nieznany
Pomiary podstawowych wielkosci Nieznany
1 Pomiary sil i przemieszczen, Nieznany (2)
03 Badania i pomiary ukladow an Nieznany
więcej podobnych podstron