1
Podstawy techniki
mikroprocesorowej
ETEW006
Układy czasowo – licznikowe
Andrzej Stępień
Katedra Metrologii Elektronicznej i Fotonicznej
Standard Serial Interface
RS-232
(Recommended Standard 232; 1969), TIA-232-F Interface Between Data
Terminal Equipment and Data Circuit-Terminating Equipment Employing Serial Binary
Data Interchange, issued in 1997: TxD, RxD and
I
2
C–Bus
(Inter Integrated Circuit Bus; Philips, early 1980's):
SCL (clock)
SDA (data)
CAN
(Controller Area Network; Robert Bosch GmbH, 1983):
CAN_H
CAN_L
SMBus
(System Management Bus, Intel, 1995):
SMBCLK (clock)
SMBDAT (data)
USB
(Universal Serial Bus; Compaq, DEC, IBM, Intel, Microsoft, NEC and Nortel,
1994):
D+ (Data +)
D– (Data –)
SPI
(Serial Peripheral Interface Bus; Motorola),
Microwire
(National Semiconductor):
MOSI (Master Output Slave Input)
SO (Serial Output)
MISO (Master Input Slave Output)
SI (Serial Input)
SCK (Serial ClocK)
SK (Serial Shift Clock)
SS
(Slave Select)
CS (Chip Select)
single-ended simple two-wire bus
differential pair defined in the USB 2.0 specification
single-ended simple two-wire bus
differential pair defined in the USB 2.0 specification
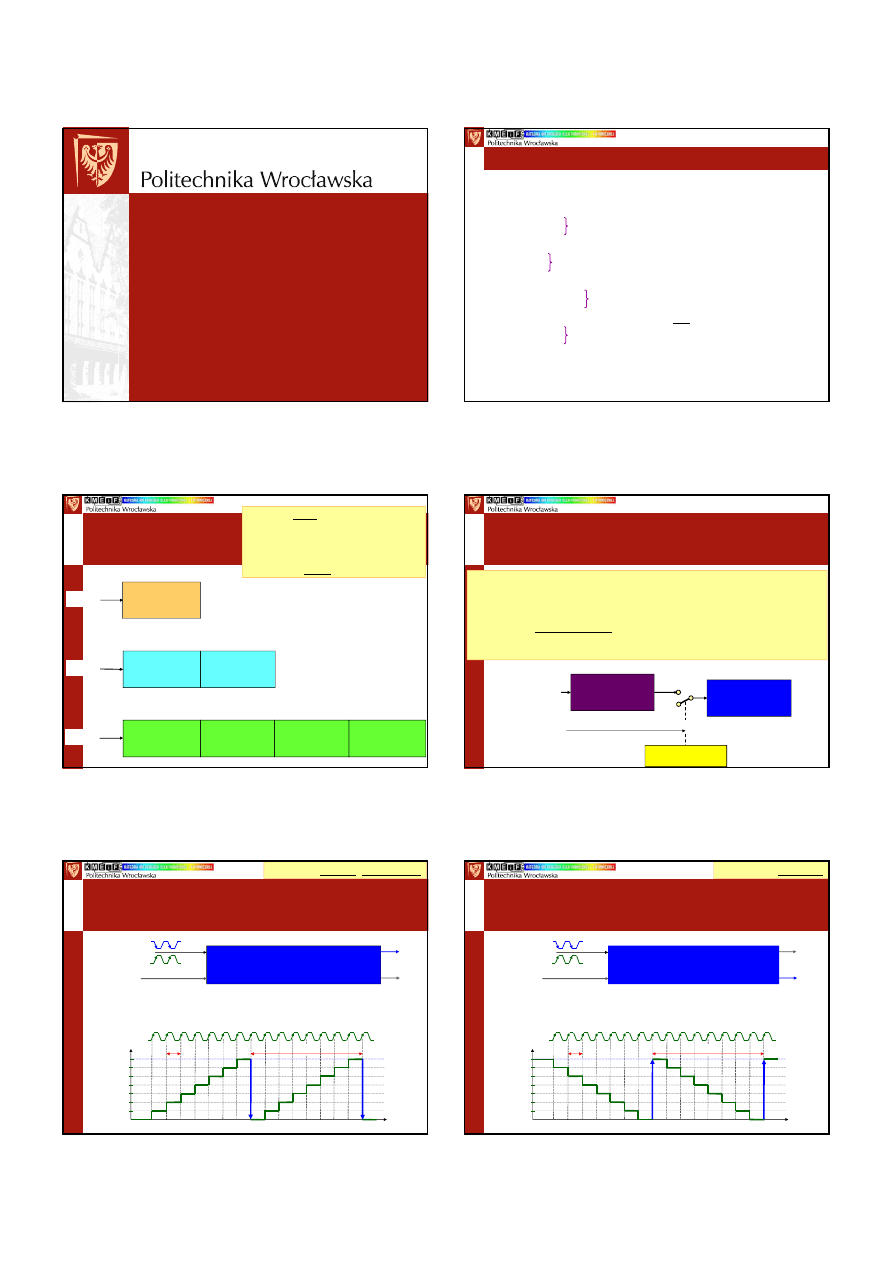
N-bit
Timer/Counter
16-bit Timer
High Register
Timer
15..8
Clock
16-bit Timer
Low Register
Timer
7..0
Clock
8-bit
Timer Register
Timer
7..0
32-bit Timer
Lower Register
Timer
15..8
Clock
32-bit Timer
Lowest Register
Timer
7..0
32-bit Timer
Highest Register
Timer
31..24
32-bit Timer
Higher Register
Timer
23..16
0
0
0
7
7
7
8
8
15
15
16
23 24
31
Timer
– zegar, stoper, czasomierz,
minutnik, mechanizm zegarowy (do
wł
ą
czania/wył
ą
czania), programator
zegarowy
Counter
– licznik
K-bit Prescaler
N-bit Timer/Counter
Taktowanie
(Clock)
K-bitowy
dzielnik wst
ę
pny
(Prescaler)
N-bitowy
dzielnik
(Timer / Counter)
1
0
Układ kontrolny
(Control Logic)
po sprz
ę
towym zerowaniu (after Reset)
Scaling
– skalowanie, zmiana skali: mno
ż
enie (np. powielanie
cz
ę
stotliwo
ś
ci sygnału w p
ę
tli PLL) lub dzielenie (np. podział cz
ę
stotliwo
ś
ci
sygnału w dzielniku, zmiana współczynnika wypełnienia sygnału itp.)
Prescaler
– wst
ę
pny dzielnik (łac. pre – przed, post – po) w celu
rozszerzenia zakresu cz
ę
stotliwo
ś
ci sygnałów wej
ś
ciowych lub zmiany
cz
ę
stotliwo
ś
ci sygnałów wyj
ś
ciowych
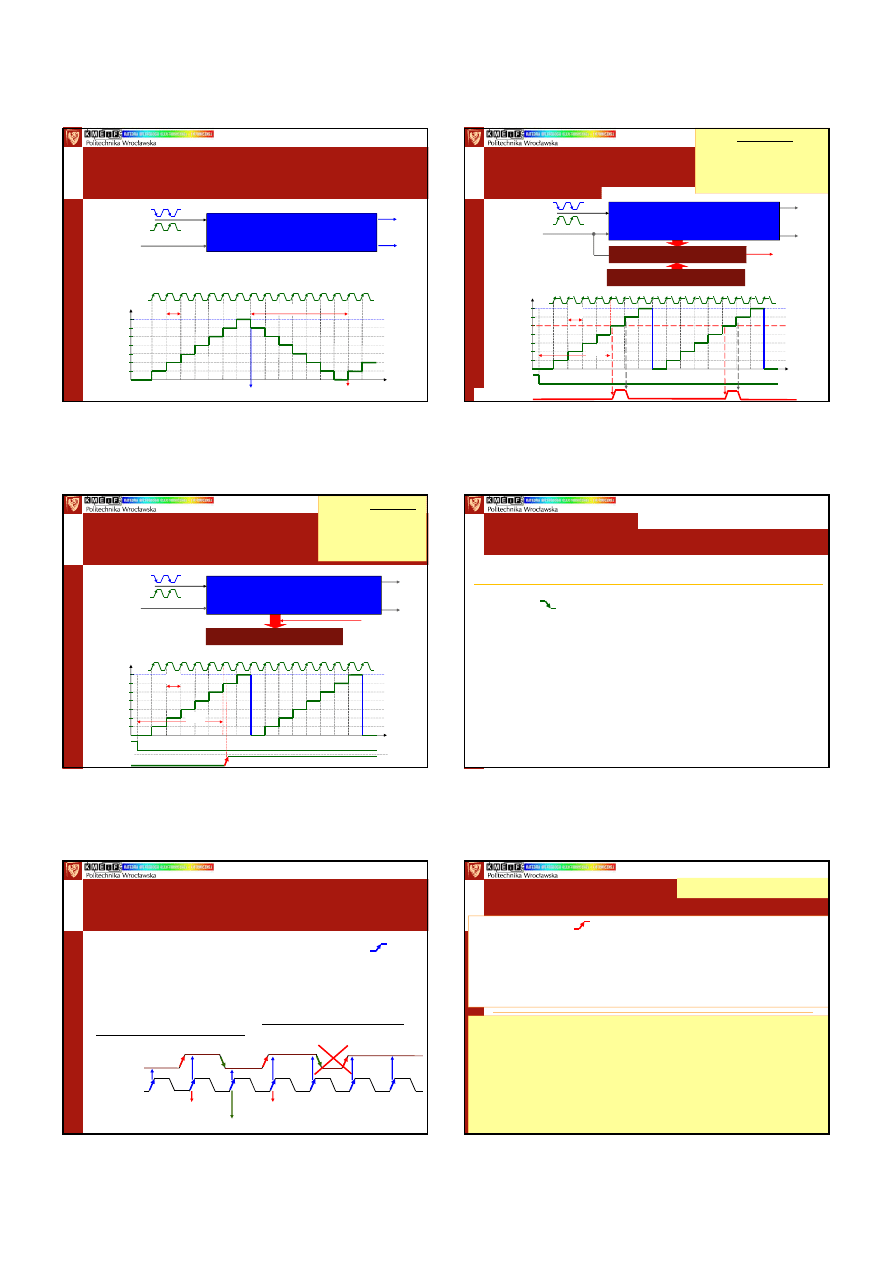
3
–
bitowy Timer/Counter
Tryb zliczania w górę
(Up
–
Counting Mode)
N=2
0
CLR
N-bitowy Timer/Counter
Timer
CLK
0
1
2
3
4
5
6
7
1
2
3
4
5
6
7
8
przepełnienie (overflow)
1
2
3
4
5
6
7
8
1
µµµµ
s
8
µµµµ
s
Timer
CLK
or
Underflow
Przepełnienie (Overflow)
Overflow
– nadmiar, przepełnienie
t
Clear
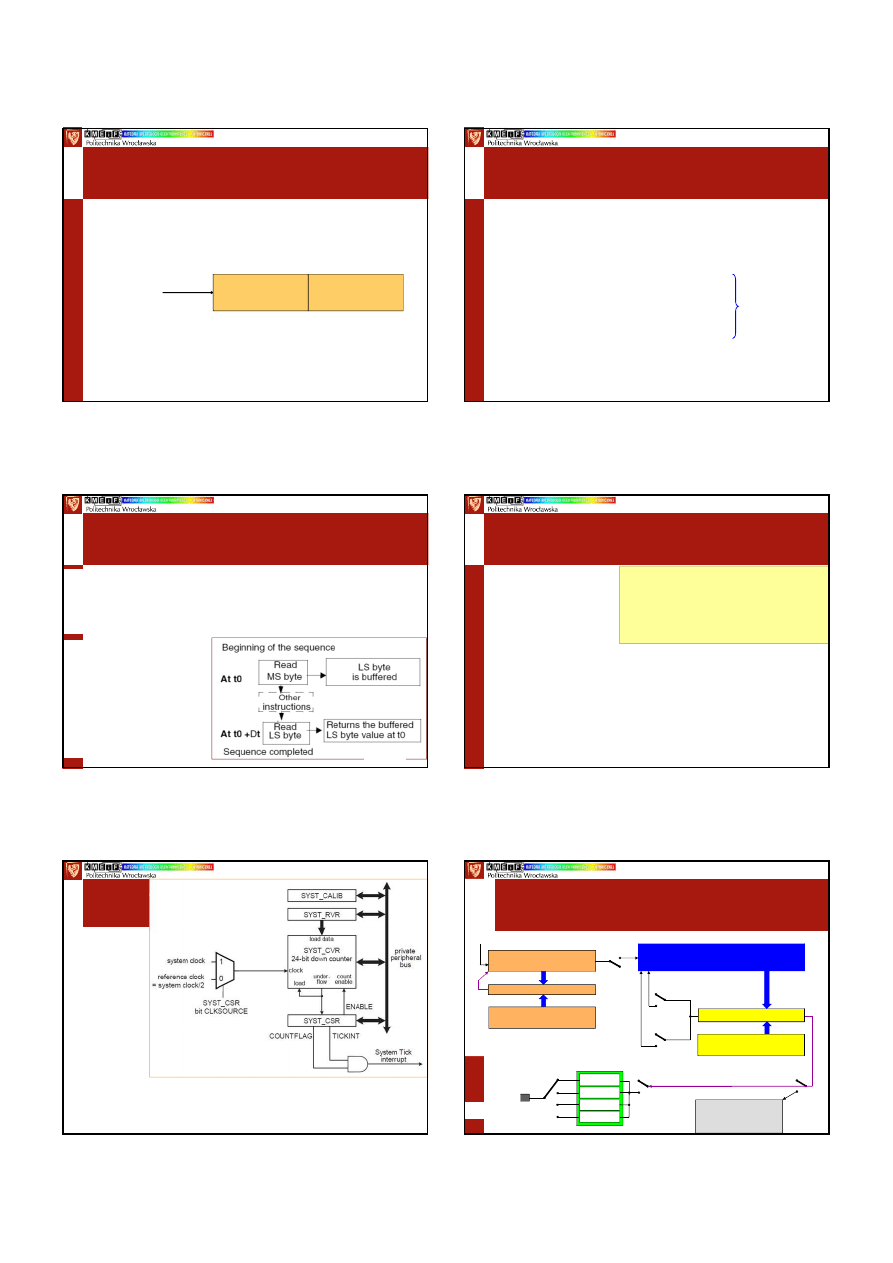
3
–
bitowy Timer/Counter
Tryb zliczania w dół
(Down
–
Counting Mode)
N=2
0
CLR
N-bitowy Timer/Counter
Timer
CLK
0
1
2
3
4
5
6
7
1
2
3
4
5
6
7
8
Niedomiar (Underflow)
1
2
3
4
5
6
7
8
1
µµµµ
s
8
µµµµ
s
Timer
CLK
or
Niedomiar (Underflow)
Overflow
Underflow
– niedomiar
t
Clear
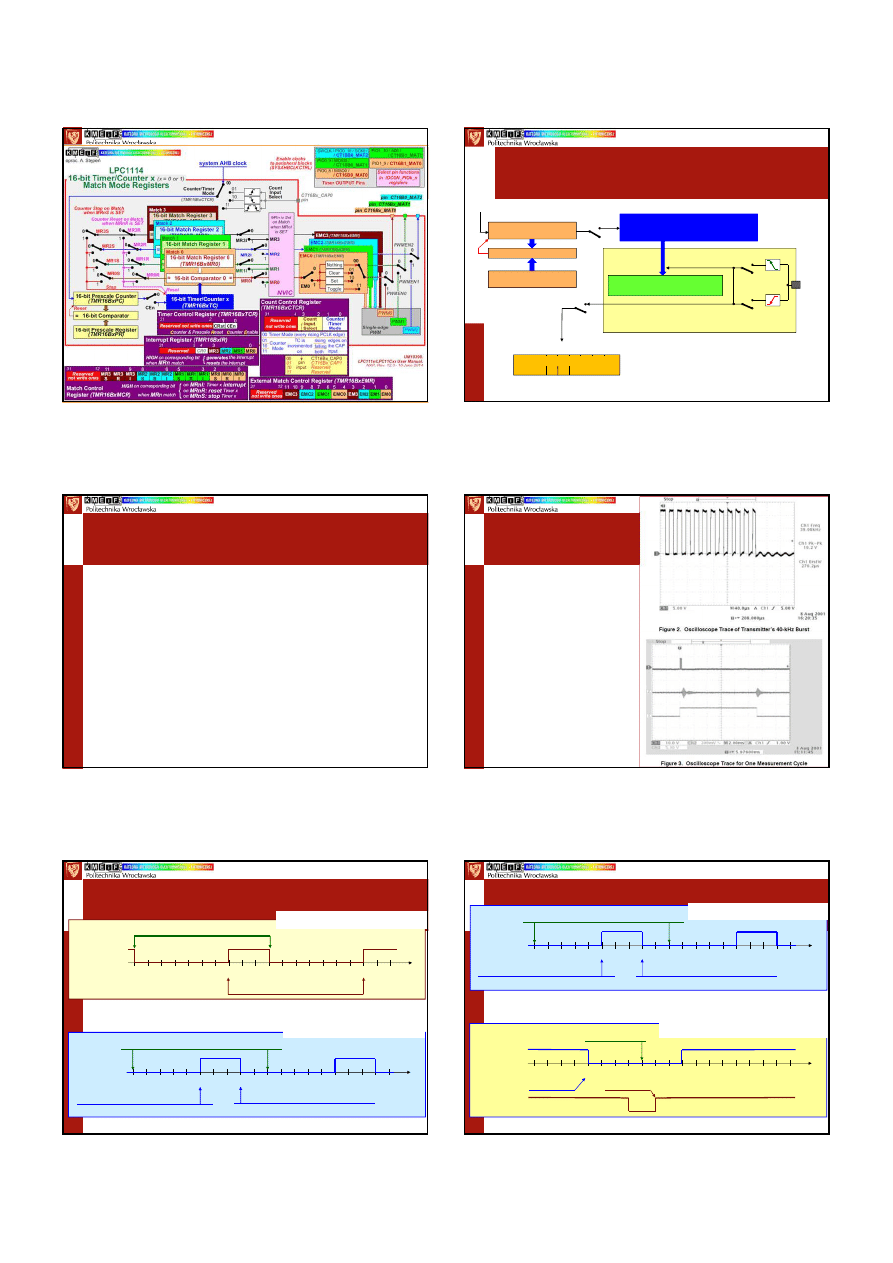
2
3
–
bitowy Timer/Counter
Tryb odliczania w górę i w dół
(Up/Down
–
Counting Mode)
N=2
0
CLR
N-bitowy Timer/Counter
Timer
CLK
0
1
2
3
4
5
6
7
1
2
3
4
5
6
7
1
Przepełnienie (Overflow)
2
3
4
5
6
7
1
Niedomiar (Underflow)
7
µµµµ
s
Timer
CLK
or
2
t
1
µµµµ
s
Clear
Niedomiar (Underflow)
Przepełnienie (Overflow)
3
–
bitowy Timer/Counter
Tryb porównania
(Match Mode)
N=2
Clear
Timer
CLK
0
1
2
3
4
Match = 5
6
7
1
2
3
4
5
6
7
8
1
2
3
4
5
6
7
8
Clear
1
µµµµ
s
Timer
CLK
or
Znacznik
porównania
(Match Flag)
Match
– porównywa
ć
, paso-
wa
ć
, dopasowywa
ć
, dobie-
ra
ć
, zestawia
ć
, dorówny-
wa
ć
, dostosowywa
ć
, odpo-
wiada
ć
sobie
t
CLR
N-bitpwy Timer/Counter
Niedomiar (Underflow)
Przepełnienie (Overflow)
Match flag
5
µµµµ
s
N-bitowy komparator
=
N-bitowy Match Register
Reset flag ??
=
Reset flag ??
0
3
–
bitowy Timer/Counter
Tryb zapamiętania wartości
(Capture Mode)
N=2
0
Timer
CLK
0
1
2
3
4
5
6
7
1
2
3
4
5
6
7
8
1
2
3
4
5
6
7
8
Clear
1
µµµµ
s
Timer
CLK
or
Capture
write to
Capture
– chwycenie,
zdobycie, pojmanie,
uj
ę
cie, opanowanie,
zawładni
ę
cie, przej
ę
-
cie (read on the fly)
N-bitowy Capture Register
t
CLR
N-bitowy Timer/Counter
Niedomiar (Underflow)
Przepełnienie (Overflow)
Capture
6
µµµµ
s
Clear
stan licznika w funkcji ’Timer’ jest zwi
ę
kszany przy ka
ż
dym sygnale
taktuj
ą
cym PCLK
stan licznika w funkcji ’Counter’ jest zwi
ę
kszany po wykryciu zbocza
opadaj
ą
cego ( ) sygnału zewn
ę
trznego na wej
ś
ciu (pinie) mikrokontrolera
sygnał zewn
ę
trzny jest próbkowany jeden raz w ka
ż
dym cyklu maszynowym
mikrokontrolera:
•
stan licznika jest zwi
ę
kszany (inkrementowany) je
ś
li stan impulsu
zewn
ę
trznego jest wysoki w czasie jednego cyklu maszynowego i niski w
nast
ę
pnym cyklu
•
nowa warto
ść
licznika pojawia si
ę
w nast
ę
pnym cyklu, po którym wykryto
zmian
ę
sygnału zewn
ę
trznego
•
do wykrycia ka
ż
dego zbocza sygnału zewn
ę
trznego wymagane dwa
cykle maszynowe
•
minimalny czas trwania stanu niskiego / wysokiego sygnału
zewn
ę
trznego wynosi jeden cykl maszynowy mikrokontrolera
MCS51
Impulsy zewnętrzne
UM10147. P89LPC952/954 User manual.
NXP, Rev. 01 — 17 September 2007, p.47
MicroConverter
®
, Multichannel 12-Bit ADC with
Embedded Flash MCU. Analog Devices, Rev.F, 2013, p.29
ARM7
Zliczanie impulsów zewnętrznych
UM10120. LPC2131/2/4/6/8 User manual.
NXP, Rev. 4 — 23. April 2012, p.195
dwa kolejne narastaj
ą
ce zbocza sygnału taktuj
ą
cego PCLK ( )
wykorzystane do identyfikacji tylko jednego zbocza zewn
ę
trznego
sygnału na wej
ś
ciu CAP
• minimalny czas trwania stanu niskiego / wysokiego sygnału
zewn
ę
trznego wynosi jeden cykl maszynowy mikrokontrolera
(Since two successive rising edges of the PCLK clock are used to identify only
one edge on the CAP selected input, the frequency of the CAP input can not
exceed one fourth of the PCLK clock.)
PCLK
Timer + 1
sygnał
zewn
ę
trzny
Timer + 1
Timer + 1
Cortex-M0/M0+
Taktowanie zewnętrzne
(External input)
narastaj
ą
ce zbocze ( ) zewn
ę
trznego sygnału zwi
ę
ksza (inkrementuje)
stan licznika TPM (16-bit Timer/PWM Module)
cz
ę
stotliwo
ść
zewn
ę
trznego sygnału wej
ś
ciowego musi by
ć
o połow
ę
mniejsza ni
ż
cz
ę
stotliwo
ś
ci taktuj
ą
ca zegara/licznika TPM
programowalny stopie
ń
podziału w dzielniku wst
ę
pnym (prescaler counter,
divide-by 1, 2, 4, 8, 16, 32, 64, or 128)
KL14 Sub-Family Reference Manual.
Freescale, KL14P80M48SF0RM, Rev. 3, September 2012, p.520
UM10398. LPC111x/LPC11Cxx User manual.
NXP, Rev. 12.3 — 10 June 2014, p.342
dost
ę
pne dwa 16/32-bitowe liczniki / timery z 16/32-bitowym preskalerami
dwa kolejne zbocza narastaj
ą
ce sygnału taktuj
ą
cego PCLK wykorzystywane
do wykrycia zbocza sygnału zewn
ę
trznego na wej
ś
ciu CAP
cz
ę
stotliwo
ść
zewn
ę
trznego sygnału wej
ś
ciowego nie mo
ż
e
przekracza
ć
połowy cz
ę
stotliwo
ś
ci sygnału taktuj
ą
cego PCLK
(Since two successive rising edges of the PCLK clock are used to identify only one
edge on the CAP selected input, the frequency of the CAP input can not exceed one
half of the PCLK clock. Consequently, duration of the HIGH/LOW levels on the same
CAP input in this case can not be shorter than 1/(2
∗
PCLK).)
3
16-bitowy Timer/Counter w 8-bitowym MCU
Odczyt/wpis wartości
(Read/Write Timer/Counter Value)
Free running Timer
High Register
T
HIGH
Sekwencje odczytu
(Read sequence):
Sekwencje wpisu
(Write sequence):
1. Odczyt T
HIGH
2. Odczyt T
LOW
lub
1. Odczyt T
LOW
2. Odczyt T
HIGH
1. Wpis T
HIGH
2. Wpis T
LOW
lub
1. Wpis T
LOW
2. Wpis T
HIGH
Clock
Free running Timer
Low Register
T
LOW
Wpis/odczyt synchroniczny
• programowy wpis synchroniczny
:
– zatrzymanie licznika na czas wpisu
– korekta wpisywanej warto
ś
ci o czas wpisu,
zatrzymania, uruchomienia licznika
– wpis cz
ęś
ci mniej znacz
ą
cej
– wpis cz
ęś
ci bardziej znacz
ą
cej
– ponowne uruchomienie licznika
licznik
zatrzymany
Wpis / odczyt do / z 16-bitego rejestru
licznika Timer 1
(TIM1_CNTR)
8-bitowy bufor
przy
odczycie
:
Oprogramowanie
odczytuje bajt bardziej
znacz
ą
cy
(automatyczne
buforowanie bajtu mniej
znacz
ą
cego)
, a w drugiej
kolejno
ś
ci bajt mniej
znacz
ą
cy z bufora.
Brak buforowania przy wpisie warto
ś
ci do rejestru Timer 1
(TIM1_CNTR)
Wpis warto
ś
ci do rejestru licznika Timer 1 (TIM1_CNTRH & TIM1_CNTRL) w
dowolnym momencie; nie zaleca si
ę
wpisu nowej warto
ś
ci w trakcie pracy
licznika (nieprawidłowa warto
ść
).
Figure 30
RM0016. STM8S microcontroller family.
Reference manual. STMicroelectronics, Doc ID 14587, Rev 6. 2009, p.136
ATmega8 — Timer/Counter
Accessing 16-bit Registers
Write
:
; Set TCNT1 to 0x01FF
LDI
R17, 0x01
LDI
R16, 0xFF
OUT TCNT1H, R17
; TempReg
←
R17,
high byte first
OUT TCNT1L, R16
; TCNT1L
←
R16,
low byte second
; TCNT1H
←
TempReg
Read
:
; Read TCNT1 into R17:R16
IN
R16, TCNT1L
; TempReg
←
TCNT1H,
low byte first
IN
R17, TCNT1H
; R17
←
TempReg,
high byte second
ATmega8(L). 8-bit AVR with 8K Bytes In-System
Programmable Flash. Atmel Co. 2486T–AVR–05/08, p.79
unsigned int i;
.................
TCNT1 = 0x1FF; /* Set TCNT1 to 0x01FF */
.................
i = TCNT1;
/* Read TCNT1 into i */
.................
Cortex─M0
System Tick Timer
intended to
generate a fixed
10 millisecond
interrupt for use
by an operating
system or other
system
management
software
simple 24-bit
timer
no external pins
UM10398. LPC111x/LPC11Cxx User manual.
NXP, Rev. 12.3 — 10 June 2014, p.404
Fig 90. System Tick Timer block diagram
clocked internally by the system clock or the system clock/2
enabled through the SysTick control register
uses dedicated exception vector
Cortex
M0
System
Tick Timer
LPC1114
16-bit Timer/Counter 0/1
Match Mode
(TMR16BxTCR)
CEn
1
0
16-bit Comparator
16-bit Prescale Register
(TMR16BxPR)
=
16-bit Prescale Counter
(TMR16BxPC)
pin
CT16Bx_MATy
F
CORE
UM10398. LPC111x/LPC11Cxx User manual.
NXP, Rev. 12.3 — 10 June 2014, Chapter 20
16-bit Timer/Counter CT16Bx
(TMR16BxTC)
Reset
16-bit Comparator
16-bit Match Register y
(TMR16BxMRy)
=
=
MRyR
(TMR16BxMCR)
1
0
Reset
MRyS
(TMR16BxMCR)
1
0
Stop
1
0
MRyI
(TMR16BxMCR)
NVIC
Interrupt Register
(TMR16BxIR)
1
0
Nothing
Clear
Toggle
Set
00
01
10
11
EMCy
(TMR16BxEMR)
EMy
(TMR16BxEMR)
4
Cortex-M0 — CT16B0/1
Tryb porównania
(Match Mode)
LPC1114
32-bit Timer/Counter 1
Capture Mode
16-bit Capture 0 Register
(TMR16B1CR0)
(TMR32B1TCR)
CEn
1
0
32-bit Comparator
32-bit Prescale Register
(TMR32B1PR)
=
32-bit Prescale Counter
(TMR32B1PC)
1
0
pin
CAP0RE
(TMR16B1CCR)
1
0
CAP0FE
(TMR16B1CCR)
R
/
P
IO
1
_
0
/
A
D
1
/
C
T
3
2
B
1
_
C
A
P
0
32-bit Interrupt Register
(TMR32B1IR)
4
0
C
R
0
1
0
CAP0I
(TMR16B0CCR)
F
CORE
Capture 0
UM10398. LPC111x/LPC11Cxx User manual.
NXP, Rev. 12.3 — 10 June 2014, Chapter 20
32-bit Timer/Counter CT32B1
(TMR32B1TC)
Reset
MSP430xxx
Capture - Example
pr
ę
dko
ść
d
ź
wi
ę
ku w powietrzu w temperaturze pokojowej
wynosi
1100 ft/s (
~335 m/s
)
ultrad
ź
wi
ę
kowy nadajnik MSP430 generuje 12 prostok
ą
tnych
impulsów o cz
ę
stotliwo
ś
ci 40 kHz
;
ultrad
ź
wi
ę
kowy odbiornik
nasłuchuje
echa
Timer_A
w MSP430 zlicza impulsy o cz
ę
stotliwo
ś
ci
40-kHz
(rozdzielczo
ść
25
µ
s)
wszystkie sygnały s
ą
wyznaczane w generatorze sterowanym
rezonatorem kwarcowym (wysoka stabilno
ść
generowanych sygnałów)
M. Raju: Ultrasonic Distance Measurement
with the MSP430. Application Report. TI, SLAA136A, October 2001
MSP430xxx
Capture - Example
echo
jest wzmacniane w
wewn
ę
trznym wzmacniaczu
operacyjnym i doprowadzone
do wej
ś
cia
Komparatora_A
Komparator_A
wyzwala
przechwytywanie warto
ś
ci
chwilowej licznika
Timer_A;
warto
ść
odczytywana z
rejestru CCR1
(triggers a
capture of Timer_A count
value to capture compare
register CCR1)
12-cycle
echo
Single / Double Edge PWM
PWM1
t
0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7
8 9
PWMMR0 = 10, rate peroid for PWM1
PWM3
0 1 2 3 4 5
6 7 8 9 0 1
2 3 4 5 6 7 8 9
t
PWMMR0 = 10, rate peroid for PWM3
PWMMR3 = 8, PWM3 falling edge
PWMMR2 = 5, PWM3 rising edge
Single Edge Controlled Outputs
Double Edge Controlled Outputs
UM10120. LPC2131/2/4/6/8 User manual.
NXP, Rev. 3 – 4 October 2010
PWMMR1 = 7
UM10398. LPC111x/LPC11Cxx User manual.
NXP, Rev. 12.3 — 10 June 2014
Cortex-M0
ARM7
Double Edge / Center—aligned PWM
PWM3
0 1 2 3 4 5
6 7 8 9 0 1
2 3 4 5 6 7
8 9
t
PWMMR0 = 10, rate peroid for PWM3
PWMMR3 = 8, PWM3 falling edge
PWMMR2 = 5, PWM3 rising edge
Double Edge Controlled Outputs
ARM7
0 1 2 3 4 5 6 7 8 7 6 5 4 3 2 1 0 1 2 3
t
TIMx_ARR = 8
CCRx = 4
Center—aligned Controlled Outputs
RM0367 Reference manual. Ultra-low-power
STM32L0x3 advanced ARM
®
-based 32-bit MCUs.
STMicroelectronics , April 2014
STM32L053
UM10120. LPC2131/2/4/6/8 User manual.
NXP, Rev. 3 – 4 October 2010
PWM1
CCRx = 7
5
Cortex-M0 — CT16B0/1
Tryb porównania
(Match Mode)
LPC1114 - PWM Control Register
(TMR16BxPWMC)
UM10398. LPC111x/LPC11Cxx User manual.
NXP, Rev. 12.3 — 10 June 2014, p.343
ka
ż
de
wyj
ś
cie CT16Bn_MATx mo
ż
na
niezale
ż
nie
ustawi
ć
jako wyj
ś
cie
modulatora PWM lub wyj
ś
cie sterowane komparatorem Emx
16-bitowy timer
CT16B0
ma
trzy
wyj
ś
cia PWM
CT16B0_MAT [2: 0]
16-bitowy timer
CT16B1
ma
dwa
wyj
ś
cia PWM
CT16B1_Mat [1: 0]
je
ś
li wyst
ą
pi
równo
ść
stanu licznika
CT16B0/1
z którymkolwiek z innych
rejestrów porównania
, to modulator PWM ustawia wyj
ś
cie w stan
HIGH
jeden dodatkowy rejestr okre
ś
la długo
ść
cyklu PWM , słu
ż
y do
zerowania
licznika
, a tym samym ustawia stan
LOW
na
wszystkich wyj
ś
ciach
PWM
PWMENx kanał x modulatora PWM (x = 0, 1, 2 lub 3)
0
wyj
ś
cie CT16Bn_MATx sterowane przez komparator (n = 0 lub 1)
1
wyj
ś
cie CT16Bn_MATx sterowane przez modulator PWM
PWMEN3
PWMEN2
PWMEN1
PWMEN0
Reserved
not write ones to bits 31:4
0
1
2
3
4
31
PWM
PDM
low
high
t
low
high
t
low
high
t
τ
= 20% T
Output
Output
∫
0
T
f (GPIO output) dt
1
T
y =
ττττ
T
ττττ
ττττ
GPIO
V
CC
V
GND
τ
T
y = V
CC
τ
= 50% T
τ
= 80% T
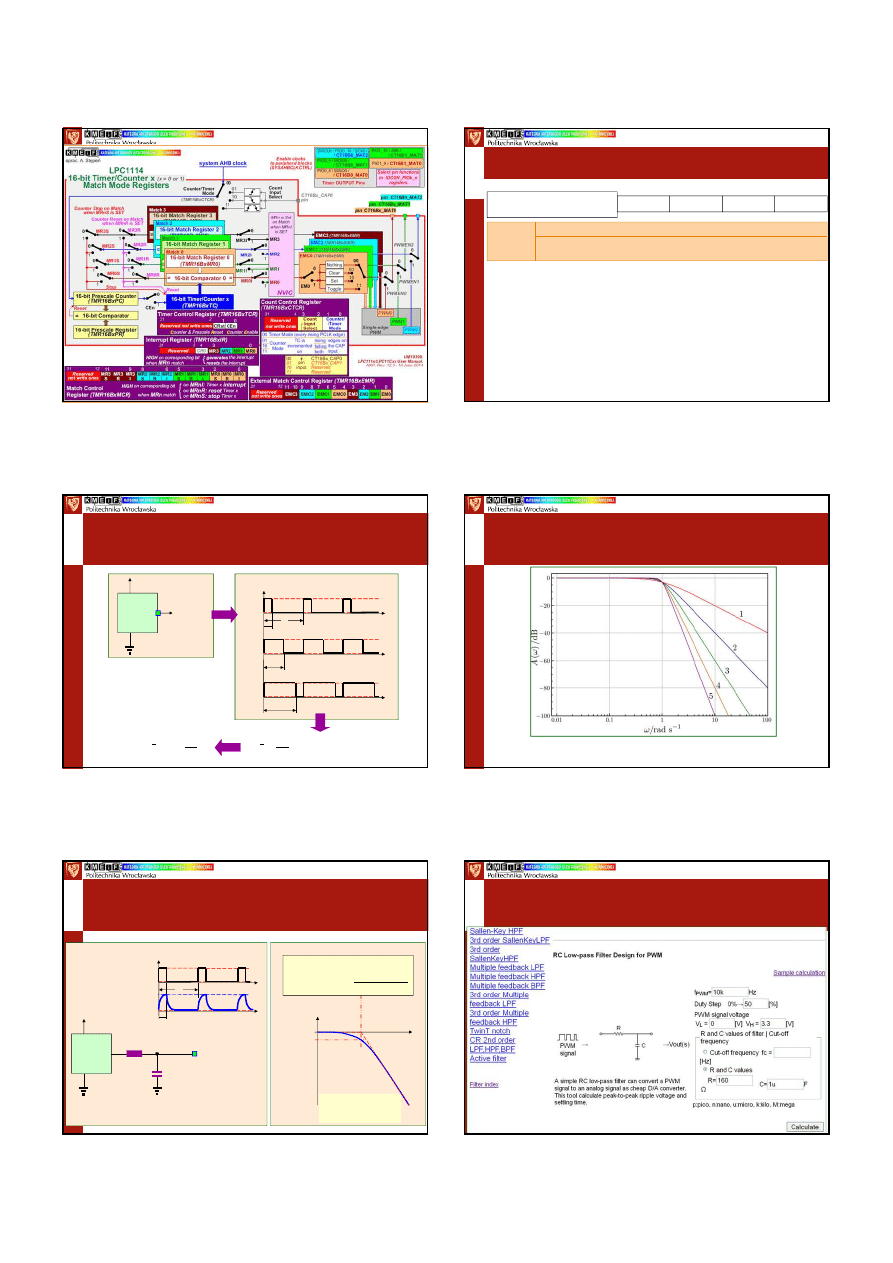
Butterworth Low Pass Filter Orders
(maximally flat magnitude filter)
Charakterystyka
dolno-przepustowego filtru Butterworth’a rz
ę
du 1 .. 5
,
cz
ę
stotliwo
ść
odci
ę
cia
ω
0
= 1.
nachylenie charakterystyki 20n dB/dekad
ę
, gdzie n jest rz
ę
dem filtru
http://en.wikipedia.org/wiki/Butterworth_filter
Simple RC Low Pass Filter
[1#2]
C = 1
µ
F
GPIO
0 dB
–3.01 dB
Gain
Slope:
– 6 dB/octave
–20 dB/decade
f
–3dB
= f
Cut-off
=
1
2
∗ π ∗
R
∗
C
Cut-off frequency:
f
low
high
t
Output
V
CC
t
V
GND
V
CC
V
GND
ττττ
T
R = 160
Ω
f
–3dB
= f
Cut-off
= 0.995 kHz
Simple RC Low Pass Filter
Design for PWM
[1#2]
OKAWA Electric Design
http://sim.okawa-denshi.jp/en/CRlowkeisan.htm
6
Simple RC Low Pass Filter
Design for PWM
[2#2]
OKAWA Electric Design
http://sim.okawa-denshi.jp/en/CRlowkeisan.htm
Simple RC Low Pass Filter
[2#2]
GPIO
V
CC
V
GND
OKAWA Electric Design
http://sim.okawa-denshi.jp/en/CRlowkeisan.htm
f
Cut-off
=
f
PWM
10
R = 160
Ω
C = 1
µ
F
f
–3dB
= f
Cut-off
= 0.995 kHz
1.65 V
low
high
t
Output
V
CC
t
V
GND
τ
= 50
µ
s
T = 100
µ
s
Peak-to-peak ripple voltage
Peak-to-peak ripple voltage:
∆
V
pk-pk
= 0.51 V
∆
V
pk-pk
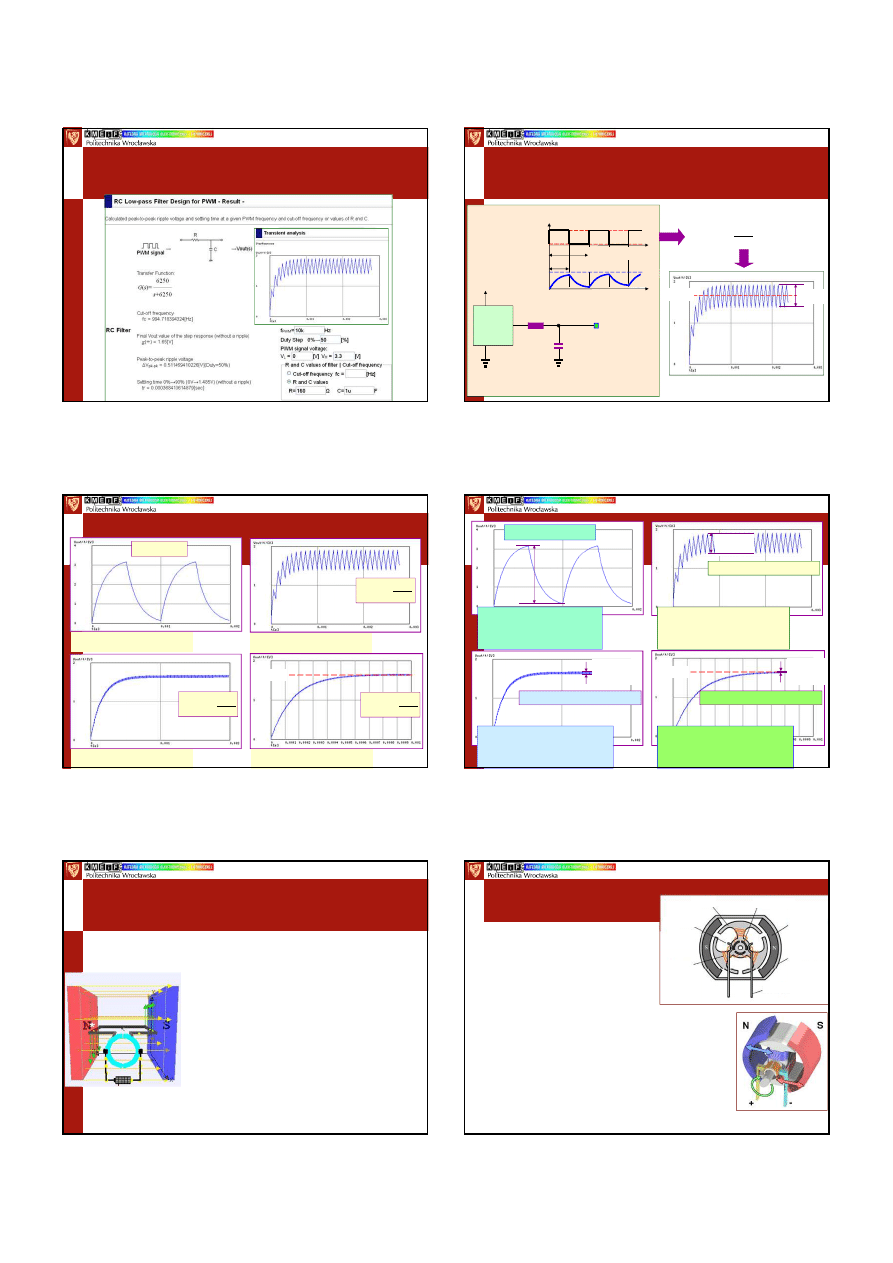
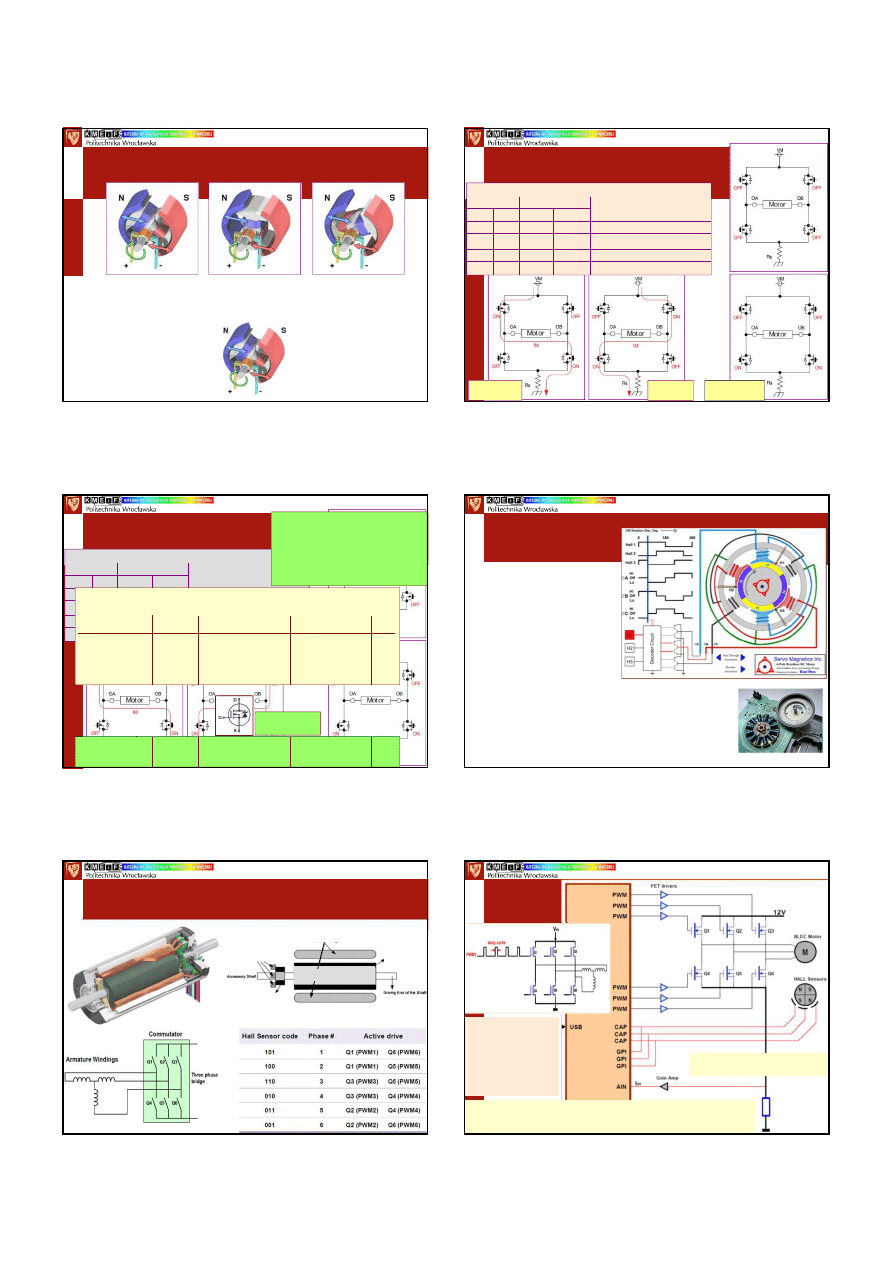
PWM and Simple RC Low Pass Filter
OKAWA Electric Design
http://sim.okawa-denshi.jp/en/CRlowkeisan.htm
Peak-to-peak ripple voltage:
∆
V
pk-pk
= 3.03 V
f
Cut-off
= f
PWM
Peak-to-peak ripple voltage:
∆
V
pk-pk
= 0.51 V
Peak-to-peak ripple voltage:
∆
V
pk-pk
= 0.052 V
f
Cut-off
=
f
PWM
100
Peak-to-peak ripple voltage:
∆
V
pk-pk
= 0.026 V
f
Cut-off
=
f
PWM
200
1.65 V
f
Cut-off
=
f
PWM
10
PWM Resolution
f
Cut-off
=
f
PWM
= 1 kHz
1.65 V
10
f
Cut-off
=
f
PWM
= 10 kHz
100
f
Cut-off
=
f
PWM
= 100 kHz
200 f
Cut-off
= f
PWM
= 200 kHz
f
Timer CLK
8 bit
→
→
→
→
256 kHz
16 bit
→
→
→
→
65 536 kHz
32 bit
→
→
→
→
4 294 967 296 kHz
∆
V
pk-pk
= 3.03 V
∆
V
pk-pk
= 0.51 V
f
Timer CLK
8 bit
→
→
→
→
2 560 kHz
16 bit
→
→
→
→
655 360 kHz
32 bit
→
→
→
→
42 949 672 960 kHz
∆
V
pk-pk
= 0.052 V
f
Timer CLK
8 bit
→
→
→
→
25 600 kHz
16 bit
→
→
→
→
6 553 600 kHz
32 bit
→
→
→
→
429 496 729 600 kHz
∆
V
pk-pk
= 0.026 V
f
Timer CLK
8 bit
→
→
→
→
51 200 kHz
16 bit
→
→
→
→
13 107 200 kHz
32 bit
→
→
→
→
858 993 459 200 kHz
Timer PWM Resolution
Silnik prądu stałego
(DC Electric Motor)
http://en.wikipedia.org/wiki/DC_motor
na
przewodnik
z
pr
ą
dem
umieszczony w
polu
magnetycznym
działała
siła elektrodynamiczna
(siła Lorentza)
kierunek siły
(F) jest
prostopadły
do
kierunku linii
pola magnetycznego
(B) i
kierunku płyn
ą
cego
pr
ą
du
(I)
szczotkowy silnik pr
ą
du stałego
wykonuje obroty
przez oddziaływanie pola magnetycznego
ruchomego wirnika
zasilanego przez mechaniczny
komutator
i
nieruchomych magnesów stałych
(stojan)
komutator
(dwa półpier
ś
cienie)
zmienia kierunek
płyn
ą
cego
pr
ą
du
co pół obrotu wirnika
Silnik szczotkowy
prądu stałego
•
przeł
ą
czanie mi
ę
dzy poszczególnymi fazami
uzwojenia wirnika poprzez osadzone na wale
wirnika pr
ę
ty komutatora i nieruchome szczotki
w obudowie stojana
•
wł
ą
czanie przez szczotki kolejnych faz uzwojenia w
czasie obrotu wirnika, stały moment obrotowy i
ci
ą
gła praca silnika
•
zalety
: niskie koszty produkcji, łatwe sterowanie
•
wady
: wysoka emisja zakłóce
ń
elektromagnetycznych, problem szczotek
Silnik szczotkowy
(komutatorowy)
pr
ą
du stałego
(
D
direct
C
urrent Motor):
•
komutator mechaniczny,
wirnik z uzwojeniem
•
stojan z magnesami stałymi
AN10513 Brushed DC motor control using the LPC2101.
NXP, Application note, Rev. 01 – 12 January 2007
komutator
wirnik
szczotki
uzwojenia
obudowa
magnesy
stałe
wyprowadzenia
7
Silnik szczotkowy prądu stałego
(Brushed DC Electric Motor)
http://pl.wikipedia.org/wiki/Silnik_pr
ą
du_stałego
silnik pr
ą
du stałego z
magnesami stałymi
w uzwojeniu wirnika płynie
pr
ą
d, a wokół niego
powstaje pole magnetyczne
lewa strona wirnika jest
odpychana w prawo przez
lewy biegun magnesu
stałego i przyci
ą
gana przez
prawy biegun magnesu,
powoduj
ą
c obrót wirnika
gdy wirnik osi
ą
gnie
poło
ż
enie poziome,
komutator zmienia
kierunek pr
ą
du
płyn
ą
cego przez
uzwojenie wirnika,
zmieniaj
ą
c tym samym
kierunek wytworzonego
pola magnetycznego
proces powtarza si
ę
wirnik kontynuuje
obrót (bezwładno
ść
)
Sterowanie
silnikiem szczotkowym
[1#2]
STA6940M. Brushed DC Motor Driver IC With PWM Control.
Allegro MicroSystems, 2009
Forward
(do przodu)
Table 1. Input Truth Table, PWM Control
Input
Output
IN1
IN2
OA
OB
Motor Function
Low
Low High Z High Z
Free
(toczenie si
ę
, luz)
PWM Low
High
Low
Forward
(obroty do przodu)
Low PWM
Low
High
Reverse
(obroty do tyłu)
High High
Low
Low
Brake
(hamowanie)
Brake
(hamowanie)
Free
Reverse
(do tyłu)
Sterowanie
silnikiem szczotkowym
[2#2]
STA6940M. Brushed DC Motor Driver IC With PWM Control.
Allegro MicroSystems, 2009
Forward
Table 1. Input Truth Table, PWM Control
Input
Output
IN1
IN2
OA
OB
Motor Function
Low
Low High Z High Z Free (toczenie si
ę
, luz)
PWM Low
High
Low
Forward (obroty do przodu)
Low PWM
Low
High
Reverse (obroty do tyłu)
High High
Low
Low
Brake (hamowanie)
Brake
Free
Reverse
Czas martwy
(Dead Time):
czas wył
ą
czenia wszystkich
tranzystorów steruj
ą
cych
przy przeł
ą
czaniu w celu
unikni
ę
cia zwarcia zasilania
silnika
Switching Time
t
ON
Turn-On Time
–
–
130
ns
Switching Time
t
OFF
Turn-Off Time
–
–
77
ns
STA6940M. Brushed DC Motor Driver IC With PWM Control. Allegro MicroSystems, 2009
ELECTRICAL CHARACTERISTICS (T
A
= 25°C, V
BB
= 24 V, V
DD
= 5 V)
Characteristics
Symbol Test Conditions
Min. Typ. Max. Unit
Switching Time
t
CON
Measured from input
–
3.0
–
µ
s
to output on
Switching Time
t
COFF
Measured from input
–
2.7
–
µ
s
to output off
FDD13AN06A0
Fairchild Semi.
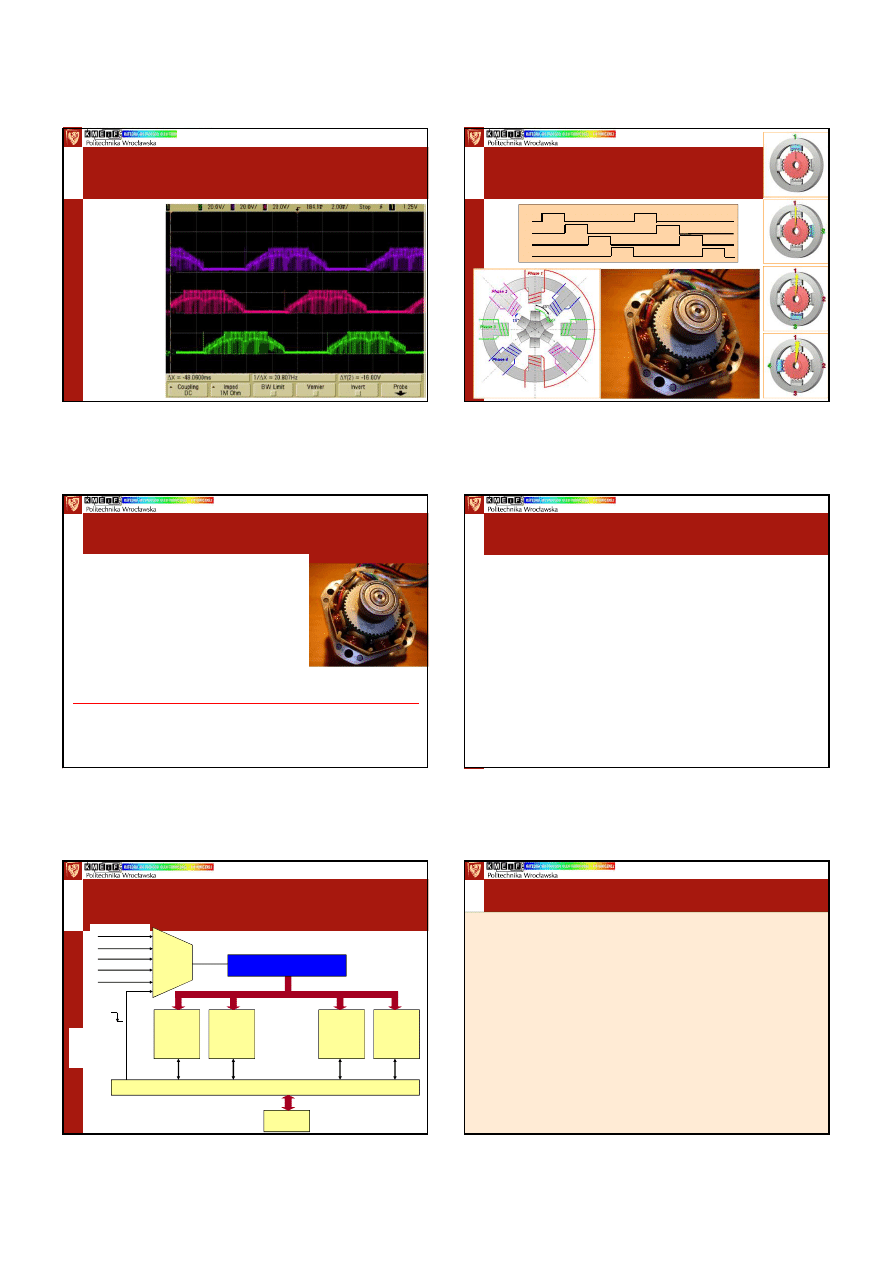
Silnik
bezszczotkowy
Silnik bezszczotkowy
(
B
rush
L
ess
D
direct
C
urrent
Motor):
•
uzwojenie stojana
•
pole magnetyczne
wytwarzane przez wiruj
ą
ce
magnesy stałe
•
komutator zast
ą
piony
elektronicznym falownikiem
•
zalety
: wysoka trwało
ść
ograniczona trwało
ś
ci
ą
ło
ż
ysk
(20 krotnie), precyzyjna regulacja obrotów (zamiast
silników krokowych)
•
wady
: wysoka cena (2-3 krotnie), skomplikowane
sterowanie
http://users.tinyworld.co.uk/flecc/4-pole-bldc-motor031102.swf
Brushless DC Motor
[1#2]
Brushless DC motor control using the LPC2141.
NXP, Application note AN10661, Rev. 01 – 17 October 2007
Hall Sensors
Hall Sensors
Magnets
Rotor
Magnet S
Rotor Magnet N
Stator Windings
Brushless
DC Motor
[2#2]
Brushless DC motor control using the LPC2141.
NXP, Application note AN10661, Rev. 01 – 17 October 2007
Motor: 120 W
Maxon EC-40
‘no-load’ speed is
5900 RPM at 24 V
maximum current
is 6 A
Motor commutation
set the PWM Timer duty cycle for speed
and drive Q1-Q6 MOSFET outputs for control of the three-phase
bridge
Timer1
generates a system-
interrupt every 10 ms
T
im
e
r0
10-bit
ADC
8
Sensorless Brushless
DC Motor Control
Figure 5.
Phase Voltages
AP08019. Sensorless Brushless DC Motor Control. Using Infineon
8-bit XC866 Microcontroller. Application Note, V1.0, Oct 2006, Infineon
Silnik krokowy
reluktancyjny
[1#2]
http://pl.wikipedia.org/wiki/Silnik_krokowy
http://en.wikipedia.org/wiki/Stepper_motor
1
2
3
4
Silnik krokowy
reluktancyjny
[2#2]
http://pl.wikipedia.org/wiki/Silnik_krokowy
http://en.wikipedia.org/wiki/Stepper_motor
k
ą
t obrotu silnika jest proporcjonalny do liczby
impulsów wej
ś
ciowych
precyzyjne pozycjonowanie i powtarzalno
ść
ruchu -
dokładno
ść
ok. 3 - 5% kroku i bł
ą
d nie kumuluje si
ę
z
kroku na krok
szybki rozbieg, hamowanie i zmiany kierunku
niezawodno
ść
- brak szczotek,
ż
ywotno
ść
ło
ż
ysk
bardzo niskie pr
ę
dko
ś
ci synchronicznych obrotów z
obci
ąż
eniem na wale silnika
szeroki zakres pr
ę
dko
ś
ci obrotowych; pr
ę
dko
ść
proporcjonalna do cz
ę
stotliwo
ś
ci
impulsów wej
ś
ciowych
rezonanse mechaniczne (niewła
ś
ciwe sterowanie)
trudno
ś
ci pracy z bardzo du
ż
ymi pr
ę
dko
ś
ciami
zjawisko gubienia kroków
du
ż
y pobór pr
ą
du i emisja ciepła
MCS51
PCA Features
[1#2]
The
PCA
consists of a :
• dedicated 16-bit counter/timer
• six 16-bit capture/compare modules
• each capture/compare module has its own associated I/O line (CEXn)
• I/O lines are routed through the Crossbar to Port I/O when enabled.
Each capture/compare module
may be configured to operate independently
in one of six modes:
• Edge-Triggered Capture
• Software Timer, High-Speed Output,
• Frequency Output,
• 8-Bit PWM
• 16-Bit PWM
The
PCA is configured and controlled
through the system controller's
Special Function Registers (SFR).
C8051F50x-F51x. Mixed Signal ISP Flash MCU Family.
Silicon Laboratories, Rev. 1.0 2/09
MCS51
PCA Features
[2#2]
SYSCLK/12
SYSCLK/4
T0 Overflow
SYSCLK
Ext Clock/8
Capture
Compare
Module 0
Capture
Compare
Module 1
Capture
Compare
Module 4
Capture
Compare
Module 5
WDT
ECI
CEX0
CEX1
CEX3
CEX4
Crossbar
Port I/O
PCA
CLOCK
MUX
max rate
=
SYSCLK/4
16-Bit Counter/Timer
C8051F50x-F51x. Mixed Signal ISP Flash MCU Family.
Silicon Laboratories, Rev. 1.0 2/09
...............
Problemy i pytania
1. Jakie jest cel stosowania liczników w mikrokontrolerach ?
2. W jakim celu do liczników jest doł
ą
czany preskaler i jaka jest jego rola ?
3. Na czym w licznikach polega tryb ’Up-Counting mode’ ?
4. Na czym w licznikach polega tryb ’Down-Counting mode’ ?
5. Na czym w licznikach polega tryb ’Up/Down-Counting mode’ ?
6. Na czym w licznikach polega tryb ’Compare mode’ ?
7. Na czym w licznikach polega tryb ’Capture mode’ ?
8. W jaki sposób w mikrokontrolerach jest wykrywane zbocze sygnału taktuj
ą
cego ?
9. Jakie s
ą
ograniczenia sygnałów taktuj
ą
cych liczniki mikrokontrolerów ?
10. Na czym polega wpis/odczyt synchroniczny liczników mikrokontrolerów ?
11. Co to jest Tick Timer i jaka jest jego rola ?
12. Jak interpretowa
ć
skrót PWM i jakie jest zastosowanie tej metody ?
13. Jakie jest przeznaczenie trybów PWM liczników mikrokontrolerów ?
14. Co oznacza poj
ę
cie BLDC ?
15. Co to jest PCA ?
Wyszukiwarka
Podobne podstrony:
10 Serial Interface 2015 www
13 Power 2015 www
4 Typy instrukcji Tryby adresowania 2015 www (1)
3 Przetw danych Typy proces 2015 www (1)
7 Stos 2015 www
12 DMA 2015 www
Lokalny program rewitalizacji osiedla „Stara Kolonia” w Brzeszczach 2005 2015 www old brzeszcze pl
6 Pamieci ROM RAM 2015 www
11 Przetworniki 2015 www
2 Architektura 2015 www
8 Przerwania 2015 www
5 Architektura MCU 2015 www (1)
10 Serial Interface 2015 www
11 Przetworniki 2015 www
Sprawozdanie 2015 www
więcej podobnych podstron