1
Podstawy techniki
mikroprocesorowej
ETEW006
Architektura
wybranych
mikrokontrolerów
Andrzej Stępień
Katedra Metrologii Elektronicznej i Fotonicznej
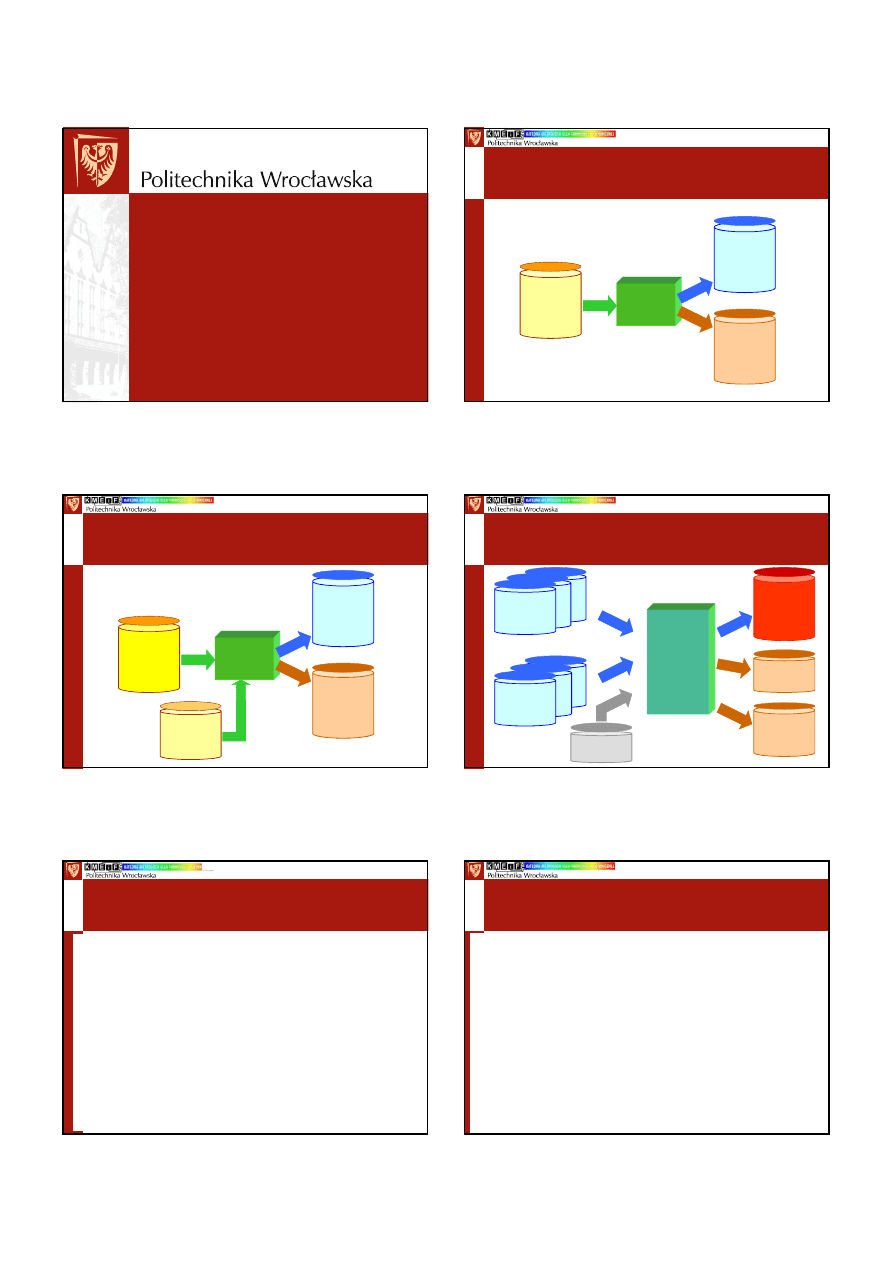
Assembler
[1#2]
Assembler
source file
∗
.asm
∗
.s
Assembler
listing file
∗
.lst
Assembler
object file
∗
.obj
Absolute / Relocatable
object file
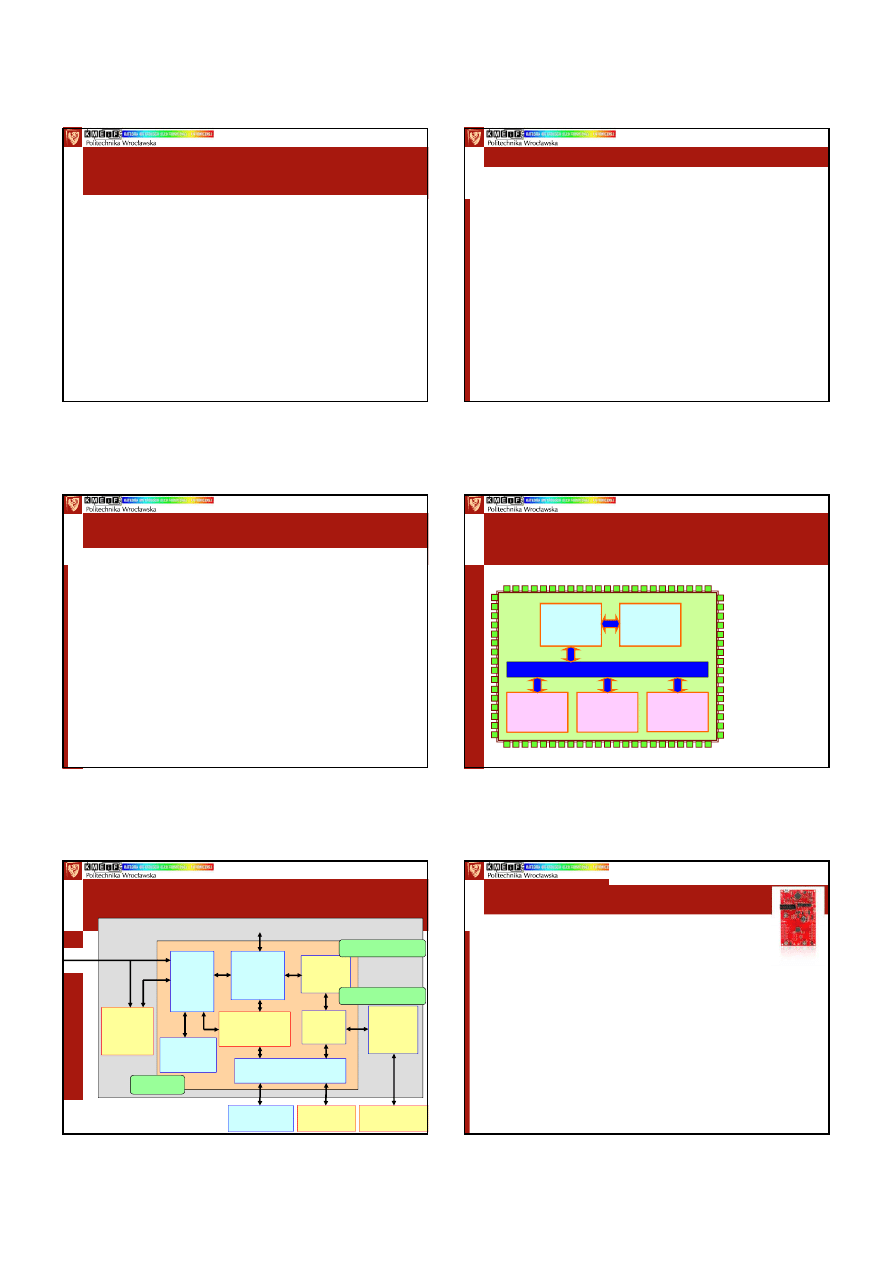
Assembler
Compiler
Compiler
source file
∗
.c
∗
.c51
Compiler
listing file
∗
.lst
Compiler
object file
∗
.obj
Absolute / Relocatable
object file
Compiler
Source file
∗
.asm
∗
.s
∗
.src
on
some
compilers
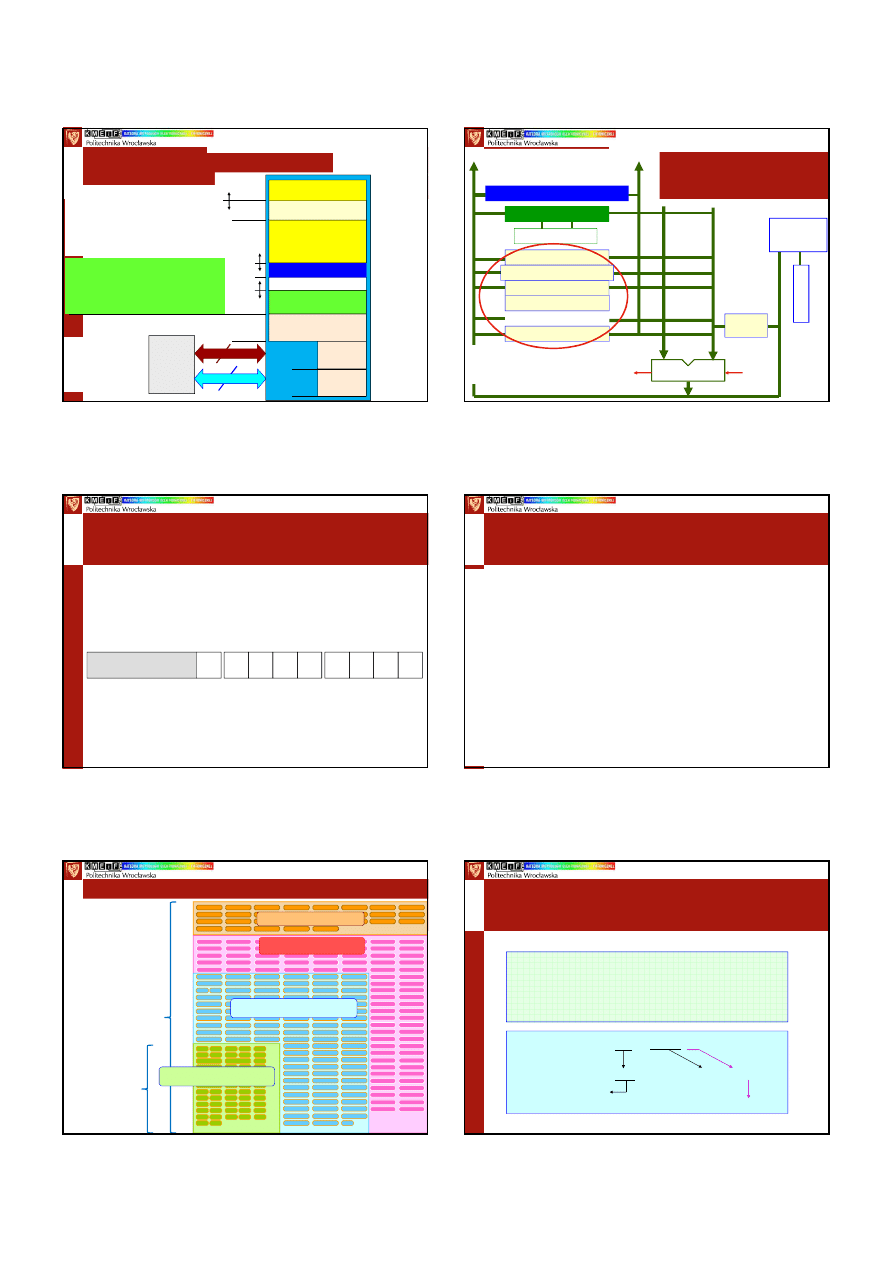
Linker
Compiler
object file
∗
.obj
Absolute / Relocatable object file
Assembler
object file
∗
.obj
Assembler
object file
∗
.obj
Assembler
object file
∗
.obj
Compiler
object file
∗
.obj
Compiler
object file
∗
.obj
Linker
[Converter]
Map file
∗
.map
∗
. m51
Library file
∗
.lib
Absolute file
∗
.
∗
.abs
∗
.hex
Symbol file
∗
.sym
IDE
(Integrated Development Environment)
http://en.wikipedia.org/wiki/Integrated_development_environment
http://pl.wikipedia.org/wiki/Zintegrowane_
ś
rodowisko_programistyczne
zintegrowane
ś
rodowisko programistyczne (IDE) lub interaktywne
ś
rodowisko programistyczne to aplikacja, zapewniaj
ą
ca kompleksowe
wsparcie dla programisty przy tworzeniu oprogramowania
zazwyczaj zło
ż
one z: edytora kodu
ź
ródłowego, asemblera, kompilatora,
linkera, debugger’a, bibliotek (np. dla zapisu stało- i zmienno-
przecinkowego, funkcji trygonometrycznych itp.), formatek / ekranów / okien
dialogowych, menu, raportów, elementów graficznych (ikony, obrazy itp.),
tworzenie baz danych (np. struktura projektu), ...
zaprojektowane do optymalizacji procesu tworzenia, modyfikowania
oprogramowania, programowania urz
ą
dzenia docelowego (mikrokontrolera)
rozwi
ą
zania komercyjne (np. MDK-ARM) lub otwarte (np. GCC / GNU
system developed to be 100% free software)
Zestaw uruchomieniowy
(Development Board = Kit)
http://en.wikipedia.org/wiki/Microprocessor_development_board
znany jako
Microcontroller Development Board
lub
Development Kit
lub
Evaluation Board / Kit
lub
Reference Design Board / Kit
Kit = zestaw
to
płytka drukowana
zawieraj
ą
ca mikrokontroler i minimaln
ą
liczb
ę
układów
logicznych umo
ż
liwiaj
ą
cych nauk
ę
działania i programowania
mikrokontrolera
stosowany
jako
prototypowy zestaw mikroprocesorowy
posiada
minimaln
ą
liczb
ę
wyprowadze
ń
/ interfejsów lub ich brak
umo
ż
liwia zaprogramowanie
i
testowanie
mikrokontrolera za
po
ś
rednictwem
specjalizowanego portu szeregowego
(
Single/Serial Wire
Debug
)
2
Embedded system
System wbudowany
to
system komputerowy
(mikroprocesorowy) z
dedykowanymi funkcjami
,
cz
ęść
wi
ę
kszego systemu mechanicznego lub elektrycznego,
zaprogramowany do wykonywania ograniczonej ilo
ś
ci zada
ń
lub tylko jednego
zadania
zawiera oprogramowanie dedykowane
jednemu zadaniu lub (cz
ę
sto
uproszczony) system operacyjny ze specjalizowanymi funkcjami
zaletami
s
ą
: niski pobór mocy, małe rozmiary, niskie koszty jednostkowe,
odporno
ść
na zakłócenia, znaczna liczba sprz
ę
towych kontrolerów interfejsów
komunikacyjnych, łatwa współpraca z ró
ż
norodnymi czujnikami (sensorami)
wad
ą
jest znacznie wy
ż
szy koszt opracowania, napisania i przetestowania
oprogramowania steruj
ą
cego systemem
przykłady
: urz
ą
dzenia przeno
ś
ne (zegarki, odtwarzacze MP3, automaty do
gier, telewizory, ..), pogodowe sterowniki ogrzewania, pralki, lodówki, kuchenki,
sterowniki pojazdów hybrydowych, sygnalizacja
ś
wietlna, avionika, ..
http://en.wikipedia.org/wiki/Embedded_system
http://pl.wikipedia.org/wiki/System_wbudowany
Dobry mikrokontroler to ...
[1#2]
Jakie znam j
ę
zyki programowania
, jakie mam do
ś
wiadczenia i jaki j
ę
zyk
chciałbym stosowa
ć
przy programowaniu systemów embedded ?
Najcz
ęś
ciej wybór pada na j
ę
zyk C
Które
procesory
s
ą
najłatwiejsze
do poznania ?
Najcz
ęś
ciej wymienia si
ę
: C51, PIC, AVR itp.
Które istniej
ą
ce
zestawy
mikroprocesorowe s
ą
najkorzystniejsze
?
Arduino + Arduino IDE / Atmel AVR + AVR Studio 4 / Freescale HCS12 or
Coldfire + CodeWarrior / Microchip PIC+ MPLAB / ARM Cortex-M3 + ARM
RealView / ??????????
Jakie jest
wsparcie programistyczne
(IDE) i ewaluacyjne,
biblioteki
programów oraz
literatura
?
Jaka jest
stabilno
ść
produkcji
, liczba producentów rodziny procesorów,
poziom kosztów ?
Które
rozwi
ą
zania
(architektury) s
ą
najbardziej
perspektywiczne
?
Cortex-Mx.
Dobry mikrokontroler to ...
[2#2]
Równie wa
ż
ne
cechy
:
–
szeroka gama układów peryferyjnych
,
‘
Crossbar- Peripherals Architecture
’
–
nietypowe rozwi
ą
zania, np. zwi
ę
kszona wydajno
ść
portów do sterowania
wska
ź
ników 7-segmentowych, krótki czas dost
ę
pu do tych układów
–
wysoka cz
ę
stotliwo
ść
taktowania, niski pobór energii, tryby redukcji mocy
–
szeroki zakres napi
ęć
zasilania i temperatur pracy
–
ró
ż
norodno
ść
obudów, w zale
ż
no
ś
ci od stopnia komplikacji układów
peryferyjnych,
–
wła
ś
ciwa długo
ść
słowa (zapis całkowitoliczbowy / zmiennoprzecinkowy)
–
typy wykonywanych operacji: bajtowe, słowowe, bitowe
–
efektywno
ść
, wydajno
ść
pracy, przetwarzanie potokowe, struktura RISC
–
wsparcie dla wyj
ą
tków, wielow
ą
tkowo
ś
ci, bankowanie rejestrów
–
wsparcie do aplikacji systemu operacyjnego, współpraca z zewn
ę
trznymi
pami
ę
ciami ...
Procesor vs Rdzeń (Core)
Rdze
ń
(Core)
System
System
testuj
ą
cy
(Debug
System)
Wewn
ę
trzna magistrala (Internal Bus)
Peripherals
&
I/O
System
Pami
ęć
(Memory)
Rozwijane przez
producentów
układów scalonych
(chipów)
Rozwijane przez
producenta rdzenia
(licencjonodawc
ę
)
Procesor vs Rdzeń (Core)
Cortex-M0/M0+
Cortex™-M0 Technical Reference Manual.
Rev. r0p0. ARM DDI 0432C, p.2-2
Cortex™-M0+ Technical Reference Manual.
Rev. r0p1. ARM DDI 0484C, p.2-2
Optional
Wakeup
Interrupt
Controller
(WIC)
Optional
Memory
Protection Unit
(MPU)
Cortex-M0
Cortex-M0+
processor
core
Nested
Vectored
Interrupt
Controller
(NVIC)
4 priority
levels
Breakpoint
&
Watchpoint
Units
Optional
Debug
Access
Port
(DAP)
Debugger
interface
Bus matrix
Cortex-M0/
M0+
Components
Cortex-M0/
M0+
Core
Interrupts (NMI)
1 .. 32 ext. inputs
Optional
single cycle
I/O port
Optional
Serial-Wire or
JTAG debug port
Execution Trace Interface
System timer
(24-bit
SysTick Timer)
AHB-Lite
interface
to system
Fast or small
Multiplier
Number of breakpoint
comparators: 0 .. 4
Number of watchpoint
comparators: 0 .. 2
MSP430FRxxxx
Features
MSP430FR57xx, MSP430FR58xx, MSP430FR59xx,
MSP430FR68xx, and MSP430FR69xx Bootstrap Loader.
User's Guide. TI, SLAU550C–December 2013–Revised January 2015
16-Bit RISC Architecture
up to 16-MHz Clock
Wide Supply Voltage Range (1.8 V to 3.6 V)
Optimized Ultra-Low-Power Modes
:
Active Mode: Approximately 100
µ
A/MHz .. Shutdown: 0.02
µ
A
(Typical)
Real-Time Clock (RTC): 0.35
µ
A (Typical)
Ultra-Low-Power Ferroelectric RAM
(FRAM):
Fast Write at 125 ns per Word (64KB in 4 ms)
Unified Memory = Program + Data + Storage in One Single Space
10
15
Write Cycle Endurance
Radiation Resistant and Nonmagnetic
32-Bit Hardware Multiplier (MPY)
RTC
With Calendar and Alarm Functions
Five 16-Bit Timers With up to Seven Capture/Compare Registers Each
16-Channel Analog Comparator
12-Bit Analog-to-Digital Converter
(ADC) With Internal Reference and
Sample-and-Hold and up to 16 External Input Channels
Integrated LCD Driver
With Contrast Control for up to 320 Segments
3
MSP430FR57xx, MSP430FR58xx, MSP430FR59xx,
MSP430FR68xx, and MSP430FR69xx Bootstrap Loader.
User's Guide. TI, SLAU550C–December 2013–Revised January 2015
von-NEUMANN Architecture
only
Byte
only
Byte
only
Word
Word/Byte
200h
100h
The end address of RAM
depends on the amount of RAM
present and varies by device.
RAM can be used for both code
and data.
Bytes are located at even or odd
addresses
Words are only located at even
addresses
Low byte of a word is always an
even address
0C00h
Word/Byte
Word/Byte
0FFE0h
10000h
Word/Byte
Access
only
Word for CODE
Word/Byte for Data
CPU
Data
Addr
16-bit
16-bit
Special
Function
Registers
8-Bit
Peripheral
Modules
16-Bit
Peripheral Modules
RAM
Reserved
0
10h
BootLoader
Flash/ROM
Interrupt
Vector Table
Flash/ROM
the same
program and data
bus for code
memory, data
memory and SFR
Register R1 (SP)
Register R4
Register R15
Register R3 (CG2)
ALU + Shifter
Cin
C (Carry)
Z (Zero)
N (Negative)
V (oVerflow)
Temp
Register
Increment logic
Register R0 (PC)
Memory Data
Bus (MDB)
Memory Address
Bus (MAB)
Memory Address Register (MA)
Instruction
Fetch
Register
S
e
q
u
e
n
ce
r
...........
Register R2 (SR/CG1)
MSP430
CPU Architecture
MSP430FR57xx, MSP430FR58xx, MSP430FR59xx,
MSP430FR68xx, and MSP430FR69xx Bootstrap Loader.
User's Guide. TI, SLAU550C–December 2013–Revised January 2015
NOT
memory
access
MSP430
Status Register
SCG
1
SCG
0
OSC
Off
CPU
Off
GIE
N
Z
C
V
RESERVED
+2
+4
+8
+1
most used constant:
R0 - Program Counter PC
R1 - Stack Pointer SP
R2
-
Status Register SR
/ Constant Generator CG1
(+4, +8
)
R3 - Constant Generator CG2 (
0, +1, +2,
−−−−
1
)
R4 .. R15 - User working Registers
MSP430x4xx Family User’s Guide.
Texas Instruments, SLAU056G, 2007, p.4-9
MSP430
Constant Generator
R2
-
Status Register SR
/
Constant Generator CG1
(
+4, +8
)
R3 - Constant Generator CG2
(
0, +1, +2, –1
≡≡≡≡
FFh, FFFFh
):
CLR
*
Clear destination:
MOV
#
0
, dst
; 0
→
dst
*
):
MOV #
0
, dst
CLRC
*
Clear Carry bit:
BIC
#
1
, SR
;
0
→
C
*
):
BIC
#
1
, SR
CLRZ
*
Clear Zero bit:
BIC
#
2
, SR
;
0
→
Z
*
):
BIC
#
2
, SR
SETN
*
Clear Negative bit:
BIS
#
4
, SR
; 1
→
N
*
):
BIS
#
4
, SR
EINT
*
Disable general
BIS
#
8
, SR
; 1 → GIE
*
):
BIS
#
8
, SR
interrupts:
INV
*
Invert destination:
INV.W dst
;
*
):
XOR #
0FFFFh
, dst
*
) Emulation
MSP430x4xx Family User’s Guide.
Texas Instruments, SLAU056G, 2007, p.4-61 ...
Cortex-M Instruction Set
PKH
QADD
QADD16
QSUB
QSUB16
QSUB8
SHADD8
SHASX
SHSAX
SMLATT
SMLAD
SMLALBB
SMLAWT
SMLSD
SMLSLD
QADD8
QASX
QDADD
SADD16
SADD8
SASX
SHSUB16
SHSUB8
SMLABB
SMLALBT
SMLALTB
SMLALTT
SMMLA
SMMLS
SMMUL
Cortex-M4
QDSUB
QSAX
SEL
SHADD16
SMLABT
SMLATB
SMLALD
SMLAWB
SMUAD
SMULBB
SMULBT
SMULWT
SMULTB
SMULWT
SMULWB
SMUSD
SSAT16
SSAX
SSUB16
SSUB8
SXTAB
SXTAB16
SXTAH
SXTB16
UADD16
UADD8
UASX
UHADD16
UHADD8
UHASX
UHSAX
UHSUB16
UHSUB8
UMAAL
UQADD16
UQADD8
UQASX
UQSAX
UQSUB16
UQSUB8
USAD8
USADA8
USAT16
USAX
USUB16
USUB8
UXTAB
UXTAB16
UXTAH
UXTB16
ADC
CBNZ
CBZ
Cortex-M3
ADD
ADR
CLZ
BFC
BFI
CMN
CMP
LDMIA
LDMDB
LDR
LDREX
LDREXB
LDREXH
LDRSBT
LDRSHT
LDRSH
LSR
MCRR
MLS
MRC
MRRC
MUL
ORR
PLD
PLDW
RBIT
REV
REV16
AND
ASR
B
BIC
CDP
CLREX
EOR
LDC
LDRB
LDRBT
LDRD
LDRH
LDRHT
LDRSB
LDRT
MCR
LSL
MLA
MOV
MOVT
MVN
NOP
ORN
PLI
POP
PUSH
REVSH
ROR
RRX
DBG
RSB
SBC
BSBFX
SDIV
SEV
SMLAL
SSAT
STC
STMIA
STMDB
STR
STRB
STRBT
STRD
STREX
STREXB
STREXH
STRH
STRHT
STRT
TBB
TBH
TEQ
TST
UBFX
UDIV
UMLAL
UMULL
USAT
SMULL
UXTB
UXTH
WFE
WFI
YIELD
IT
VABS
VADD
VCMP
VLDR
VMLA
VMLS
VNMLA
VMMLS
VNMUL
VSUB
VFMA
VFMS
VCMPE
VCVT
VCVTR
VMOV
VMRS
VMSR
VPOP
VPUSH
VSQRT
VFNMA
VFNMS
Cortex-M4 FPU
VDIV
VLDM
VMUL
VNEG
VSTM
VSTR
BKPT
BX
BLX
CPS
DMB
DSB
ISB
MRS
MSR
ADC
AND
ADD
ASR
BL
CMN
LDR
CMP
LDRB
LDRH
LSL
LDRSB
LSR
NOP
REV16
REV
REVSH
MUL
POP
MOVN
PUSH
SEV
SXTH
SXTB
UXTB
RSB
STR
SBC
STRB
UXTH
WFI
WFE
YIELD
SUB
SVC
ADR
B
EOR
LDM
LDRSH
MOV
ORR
ROR
STM
STRH
TST
BIC
Cortex-M0/M0+/M1
Floating Point
DSP (SIMD, fast MAC)
Advanced data processing
Bit field manipulations
Architecture
ARMv7-M
Architecture
ARMv6-M
General data processing
I/O control tasks
Joseph Yiu (Senior Embedded Technology Specialist, ARM):
Which Cortex-M ? A Selection Guide.
C or ASM
(1/6)
C
instruction:
a = b + c ;
Compiled
ARM
instruction:
ADD
R1, R2, R3
ADD
R1, R2,
R3
ADD
{cond}
{S}
Rd, Rn
,
<Oprnd2>
R1 = R2 + R3
R3
4
C or ASM
(2/6)
C
instruction:
a = 8
∗
b
Destination
CF
0
Multiplication
by a power of 2
MOV
R1, R0,
LSL #3
MOV
{cond}
{S}
Rd, Rn
,
<Oprnd2>
R1 = R0
∗∗∗∗
8
Logical Left Shift
Compiled
ARM
instruction:
MOV
R1, R0, LSL #3
; R1
←
R0
∗
8
C or ASM
(3/6)
C
instruction:
if (Z == 1) R1 = R2 + ( R3
∗
4)
Compiled
ARM
instruction:
ADDEQS
R1, R2, R3, LSL #2
ADD
EQ
S
R1, R2,
R3, LSL #2
Z=1
↔
(Equal) EQ
ADD
{cond}
{S}
Rd, Rn
, <Oprnd2>
Logical Shift Left
Rm LSL #5bit_Imm
↔
<Oprnd2>
sets condition flags after instruction
↔
S
R1 = R2 + R3 SHL 2
C or ASM
(4/6)
C
instruction:
a = a
∗
(2
n
+ 1)
Compiled
ARM
instruction:
ADD
R0, R0, R0, LSL #n
; R0
←
R0 + (R0 << n)
C
instruction:
a = a
∗
(2
n
– 1)
Compiled
ARM
instruction:
RSB
R0, R0, LSL #n
; R0
←
(R0 << n) – R0
C or ASM
(5/6)
C
instruction:
a = 100
∗
a + b
Compiled
ARM
instruction:
ADD
R0, R0, R0, LSL #2
; R0 = R0
∗
5
ADD
R0, R0, R0, LSL #2
; R0 = R0
∗
5
; R0 = R0
∗
25
ADD
R0, R1, R0, LSL #2
; R0 = R1 + R0
∗
4
; R0 = R1 + (R0
∗
25)
∗
4
MLA (Multiply Accumulate):
MLA
R0, R2, R1, R0
; R0
←
R2
∗
R1 + R0
C or ASM
(6/6)
C
instruction:
if (a == 0) {
b = 23 ;
} else {
b = 42 ;
c = a ;
}
Compiled
ARM
instruction:
TEQ
R0, #0
; compare, set or reset Z flag
MOVEQ
R1, #23
; if Z=1 then R1
←
23
MOVNE
R1, #42
; if Z=0 then R1
←
42
MOVNE
R2, R0
; if Z=0 then R2
←
R0
a in R0
b in R1
c in R2
Architektura von-NEUMANN’a
Cortex-M0
[NXP LPC1114]
CPU
Data
Addr
Pami
ęć
programu
(Program Memory
32KB
MAX
on-chip Flash)
0x1000 0000
0x0000 0000
Zarezerwowane (Reserved)
32-bity
32-bity
Zarezerwowane (Reserved)
0x4000 0000
0x5000 0000
0xE000 0000
UM10398. LPC111x/LPC11Cxx User manual.
NXP, Rev. 12.3 — 10 June 2014, fig. 7
0x0001 0000
0x1000 2000
Zarezerwowane (Reserved)
1 GB
0x4008 0000
Zarezerwowane (Reserved)
0x5020 0000
Zarezerwowane (Reserved)
Własna magistrala peryferii
(PPB Private Peripheral Bus)
0xE010 0000
Zarezerwowane (Reserved)
0xFFFF FFFF
Pami
ęć
danych
(Data Memory – 8KB
MAX
SRAM)
Peryferia typu APB
(APB Peripherals)
Peryferia typu AHB
(AHB Peripherals)
4 GB
Rdze
ń
(core): NVIC, SysTick,
System Control Block;
(only word)
AHB – Advanced High-performance Bus
APB – Advanced Peripheral Bus
pozostałe peryferia
GPIO PIO3..PIO0
0x1FFF 0000
0x1FFF 4000
16KB BootLoader
5
Cortex
–
M0 / Cortex-M0+
(ARMv6M)
tryby i stany procesora
(Processor Modes and States)
J. Yiu: The Definitive Guide to the ARM Cortex-M0.
Elsevier Inc. 2011, Fig. 3.1
Thread Mode
Executing normal
code
Thumb State
Exception
Request
Exception
return
praca standardowa (normal operation)
procesor wykonuje instrukcje Thumb
Handler Mode
Executing exception
handler
Debug State
(wstrzymanie
wykonywania
instrukcji)
stan Debug mo
ż
liwy po
uruchomieniu debuggera
Debug
activities
Procesor
Cortex-M0/M0+
pracuje w:
2 trybach (modes)
i 2 stanach (states)
Start
(reset)
Procesory z architektur
ą
ARMv6-M pracuj
ą
wył
ą
cznie w trybie
uprzywilejowanym
(only privileged operation)
[DDI0419C, A2.1.1]
Cortex
–
M
Rejestry ogólnego przeznaczenia
rejestry ogólnego
przeznaczenia
Link Register (LR)
Program Counter (PC)
Stack
Pointer (SP)
ARMv6-M Architecture Reference Manual.
ARM DDI 0419C, September 2010
ARMv7-M Architecture Reference Manual.
ARM DDI 0403D, Errata 2010_Q3
Low
Register
High
Register
R0
R1
R2
R3
R4
R5
R6
R7
R8
R9
R10
R11
R12
R13 (PSP)
R14
PC
R13 (MSP)
dost
ę
pne przez
wszystkie 16-bitowe
instrukcje
Thumb
i
wszystkie 32-bitowe
instrukcje
Thumb-2
dost
ę
pne przez
wszystkie
instrukcje
Thumb-2
ale
nie wszystkie 16-bitowe
instrukcje
Thumb
n
ie
o
k
re
ś
lo
n
y
s
ta
n
re
je
s
tr
ó
w
p
o
r
e
s
e
c
ie
xPSR
PRIMASK
FAULTMASK
BASEPRI
CONTROL
Program status
register
Interrupt
mask
registers
Control register
Rejestry specjalne
Cortex
–
M0 / M0+ / M3
Wskaźniki stosu
(Stack Pointer Registers)
(General
Purpose
ARM Core
Register)
MSP
PSP
Main Stack Register
(SP_main after Reset)
Process Stack Register
(SP_process)
Link Register (LR)
Program Counter (PC)
Stack Pointer (SP)
ARMv6-M Architecture Reference Manual.
ARM DDI 0419C, September 2010
ARMv7-M Architecture Reference Manual.
ARM DDI 0403D, Errata 2010_Q3
Low
Register
High
Register
R0
R1
R2
R3
R4
R5
R6
R7
R8
R9
R10
R11
R12
R14
PC
2 najmniej znacz
ą
ce bity wska
ź
ników
stosu (
stack pointers)
maj
ą
zawsze
warto
ść
0 – wyrównanie słowowe
(
always word aligned
)
R13 (PSP)
R13 (MSP)
rejestry ogólnego
przeznaczenia
Cortex
–
M0 / Cortex
–
M0+
Rejestry statusowe
(Program Status Registers)
ARMv6-M Architecture Reference Manual.
ARM DDI 0419C, September 2010, B1.4
N Z C V
31
28
Reserved
24
APSR
T
Reserved
IPSR
Reserved
EPSR
Reserved
5
0
0 or
Exception
Number
N Z C V
31
28
Reserved
24
T
5
0
Exception
Number
Program Status Registers
(xPSR)
Res
xPSR
Cortex
–
M0 / Cortex
–
M0+
Rejestr aplikacji
(Application Program Status Register)
ARMv6-M Architecture Reference Manual.
ARM DDI 0419C, September 2010, B1.4
Application
Program Status Register
(APSR):
zawiera znaczniki (flags)
(
N
egative,
Z
ero,
C
arry/borrow, o
V
erflow)
rejestr APSR
dost
ę
pny
przez instrukcje
MSR
lub
MRS
(tak
ż
e w trybie nieuprzywilejowanym)
:
MSR
(
MSR{cond} spec_reg, Rn)
; APSR
←
Rn
MRS
(
MRS{cond} Rd, spec_reg)
; Rn
←
APSR
Niekre
ś
lony stan znaczników po resecie
N Z C V
31
28
Reserved
24
APSR
T
Reserved
IPSR
Reserved
EPSR
Reserved
5
0
0 or
Exception
Number
Program Status Registers
(xPSR)
Exception mumber
:
0
= Initial SP value
1
= Reset
2
= NMI
3
= HardFault
4...
...10
11
= SVCall
11...
...13
14
= PendSV
15
= SysTick (
zarezerwowane je
ś
li brak SysTick Timer’a
)
16
= IRQ0
...
n+15
= IRQ(n-1)
n+16...
...63
Cortex
–
M0 / Cortex
–
M0+
Rejestr przerwań
(Interrupt Program Status Register)
Cortex™-M0 Devices. Generic User Guide
ARM DUI0497A, October 2009
N Z C V
31
28
Reserved
24
APSR
T
Reserved
IPSR
Reserved
EPSR
Reserved
5
0
0 or
Exception
Number
Program Status Registers
(xPSR)
max 32 przerwania (Interrupts)
= zarezerwowane
kontroler przerwa
ń
(ARMv6-M
NVIC
)
obsługuje do
16
ź
ródeł przerwa
ń
= zarezerwowane
= zarezerwowane
6
Cortex
–
M0 / Cortex
–
M0+
Rejestr wykonania
(Execution Program Status Register)
ARMv6-M Architecture Reference Manual.
ARM DDI 0419C, September 2010, B1.4
Program Status Registers
(xPSR)
Execution Program Status Register
(EPSR):
bit-T
(bit stanu)
identyfikuje
stan Thumb procesora:
–
bit-T
nie
mo
ż
e by
ć
odczytywany przez
oprogramowania;
–
bit-T dost
ę
pny w trybie debug)
Bit-T = 1
; procesor Cortex-M0/M0+ (architektura ARMv6-M)
pracuje
wył
ą
cznie z instrukcjami Thumb
Bit-T = 0 generuje HardFault
; (wskazanie na prób
ę
wykonania instrukcji
innej ni
ż
typu THUMB
Pozostałe bity s
ą
zarezerwowane
.
N Z C V
31
28
Reserved
24
APSR
T
Reserved
IPSR
Reserved
EPSR
Reserved
5
0
0 or
Exception
Number
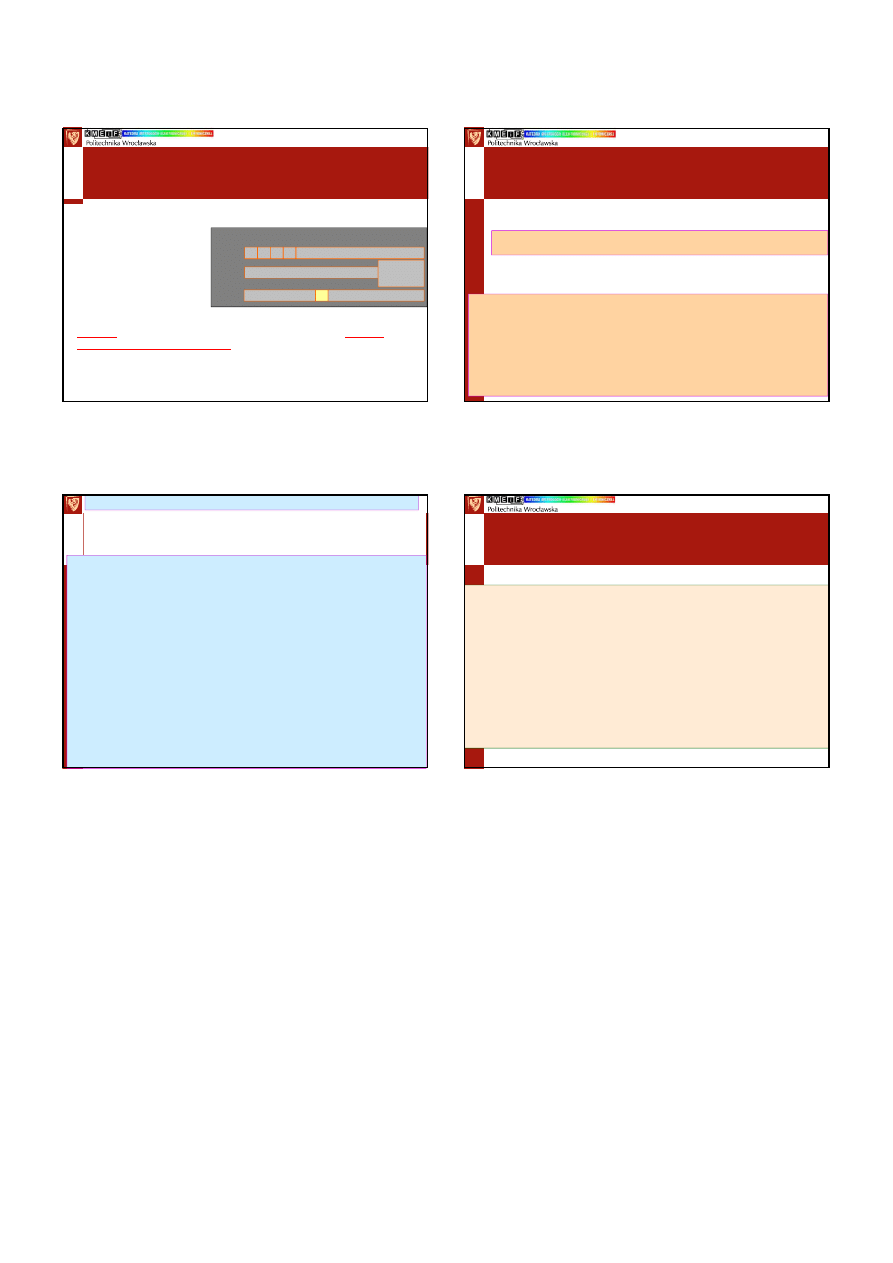
Pętla FOR
deklaracja zmiennej k
[1#2]
Keil
µµµµ
Vision IDE
void
Opoznienie
(unsigned int czas_ms) {
unsigned int k;
// deklaracja 32-bitowej zmiennej
for (k = 0; k < czas_ms
∗
6000; k++);
// pojedynczy obieg p
ę
tli trwa 1
ms
}
; r0
←
czas_ms
0x00000278 2100
MOVS r1, #0x00
; r1
←
k = 0
0x0000027A E000
B
0x0000027E
; skok do 0x027E
0x0000027C 1C49
ADDS
r1, r1, #1
; r1
←
r1 + 1 (k++)
0x0000027E 4A10
LDR
r2, [pc, #64]
; r2
←
6000 = 0x1770
0x00000280 4342
MULS
r2, r0, r2
; r2
←
czas_ms
∗
6000
0x00000282 428A
CMP
r2, r1
; porównanie r2 oraz r1
0x00000284 D8FA BHI
0x0000027C
; je
ś
li r1 < r2 to skok do 0x027C
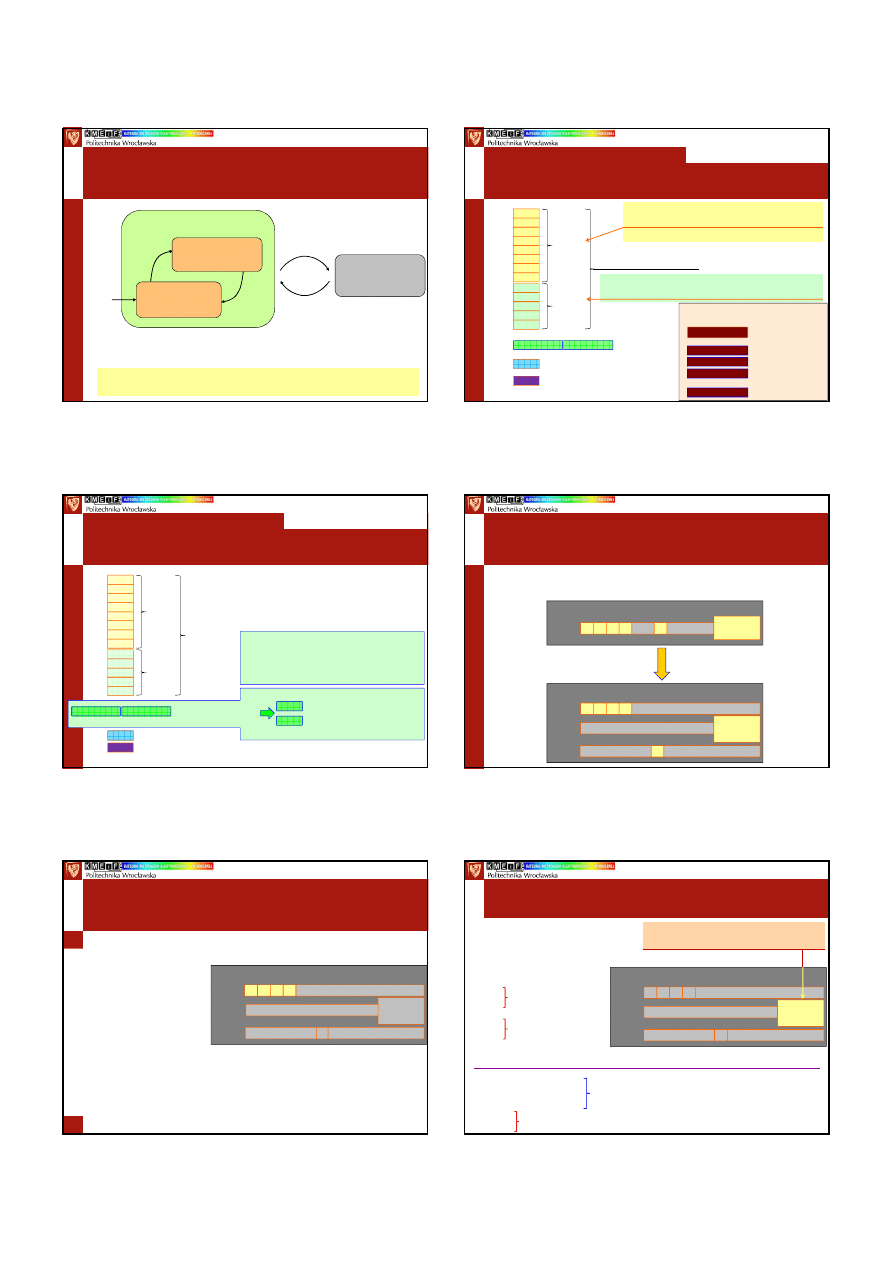
Pętla FOR
deklaracja zmiennej k
[2#2]
unsigned int k;
// deklaracja 32-bitowej zmiennej
void
Opoznienie
(unsigned int czas_ms) {
for (k = 0; k < czas_ms
∗
6000; k++);
// pojedynczy obieg p
ę
tli trwa 1 ms
}
; r0
←
czas_ms
0x00000278 2100
MOVS r1, #0x00
; r1
←
0
0x0000027A 4A15
LDR
r2, [pc, #84]
;
r2
←
0x1000000C
(
adres w zmiennej k w RAM
)
0x0000027C 6011
STR
r1, [r2, #0x00]
; (r2)
←
r1 (zapis k do RAM)
0x0000027E E004
B
0x0000028A
; skok do 0x028A
0x00000280 4913
LDR
r1, [pc, #76]
;
r1
←
0x1000000C
0x00000282 6809
LDR
r1, [r1, #0x00]
; r1
←
(r1) czyli warto
ść
k
0x00000284 1C49
ADDS
r1, r1, #1
; r1
←
r1 + 1 (k++)
0x00000286 4A12
LDR
r2, [pc, #72]
;
r2
←
0x1000000C
0x00000288 6011
STR
r1, [r2, #0x00]
; (r2)
←
r1
0x0000028A 4912
LDR
r1, [pc, #72]
; r1
←
6000 = 0x1770
0x0000028C 4341
MULS r1, r0, r1
; r1
←
czas_ms
∗
6000
0x0000028E 4A10
LDR
r2, [pc, #64]
;
r2
←
0x1000000C
0x00000290 6812
LDR
r2, [r2, #0x00]
; r2
←
(r2) czyli warto
ść
k
0x00000292 4291
CMP
r1, r2
; porównanie r2 oraz r1
0x00000294 D8F4
BHI
0x00000280
; je
ś
li r1 < r2 to skok do 0x0280
Problemy i pytania
1. Co to jest mapa pami
ę
ci (memory map) ?
2. Jakie elementy tworz
ą
map
ę
pami
ę
ci ?
3. Jak
ą
funkcj
ę
pełni
ą
rejestry R0 i R1 w procesorze MSP430 ?
4. Jak
ą
funkcj
ę
pełni
ą
rejestry R2 i R3 w procesorze MSP430 ?
5. Poda
ć
przykłady instrukcji emulowanych w procesorze MSP430.
6. Jaki obszar pami
ę
ci przyporz
ą
dkowano układom peryferyjnym w LPC1114 ?
7. Jak
ą
rol
ę
pełni
ą
rejestry R0 .. R12 w procesorach ARM Cortex-M0/M0+ ?
8. Jak
ą
rol
ę
pełni
ą
rejestry R13 i R14 w procesorach Cortex-M0/M0+ ?
9. Jak
ą
rol
ę
pełni rejestr R15 w procesorach Cortex-M0/M0+ ?
10. Jak
ą
rol
ę
pełni rejestr xPSR w procesorach Cortex-M0/M0+ ?
11. Jakie jest przeznaczenie ’Development Kit’ ?
Wyszukiwarka
Podobne podstrony:
2 Architektura 2015 www
9 Liczniki 2015 www
10 Serial Interface 2015 www
13 Power 2015 www
ARCHITEKTURA Bazodanowych aplikacji WWW, edukacja i nauka, Informatyka
4 Typy instrukcji Tryby adresowania 2015 www (1)
5 Architektura MCU 2010 id 4004 Nieznany (2)
3 Przetw danych Typy proces 2015 www (1)
7 Stos 2015 www
12 DMA 2015 www
Lokalny program rewitalizacji osiedla „Stara Kolonia” w Brzeszczach 2005 2015 www old brzeszcze pl
6 Pamieci ROM RAM 2015 www
11 Przetworniki 2015 www
8 Przerwania 2015 www
9 Liczniki 2015 www
10 Serial Interface 2015 www
więcej podobnych podstron