ŁUKI PIONOWE WYPUKŁE
zdjęcie ze strony www.webshots.com
zdjęcie ze strony
www.tibridge.com
zdjęcie ze strony www.dramainnature.com
zdjęcie ze strony www.webshots.com
Na krzywych pionowych wypukłych powinno się sprawdzać odległość widoczności
na zatrzymanie L
z
w dzień.
Ważne jest uwzględnienie długości łuku pionowego Ł, gdyż ma ona zasadnicze
znaczenie. Ponieważ pochylenia podłużne drogi mają małe wartości kątów, to wykorzystuje
się znane z geometrii uproszczenia wzorów. Dla małych kątów jakie tworzą pochylenia
podłużne zachodzi następująca zależność:
i
t
h
=
=
=
α
α
tan
sin
oraz
1
cos
=
α
L
z
R
R
Długość stycznej można określić wtedy z klasycznych wzorów geometrycznych:
2
2
tan
2
tan
2
1
2
1
i
i
R
t
+
=
+
=
=
α
α
α
→
2
2
1
i
i
R
t
+
=
[m]
(1)
gdzie:
i
1
i i
2
– pochylenia podłużne, podawane w ułamku dziesiętnym, znak „+” – stosuje się dla
pochyleń odwrotnych, a znak „–” – dla pochyleń jednakowego kierunku, tj. obydwa
pochylenia są wzniesieniami lub obydwa pochylenia są spadkami.
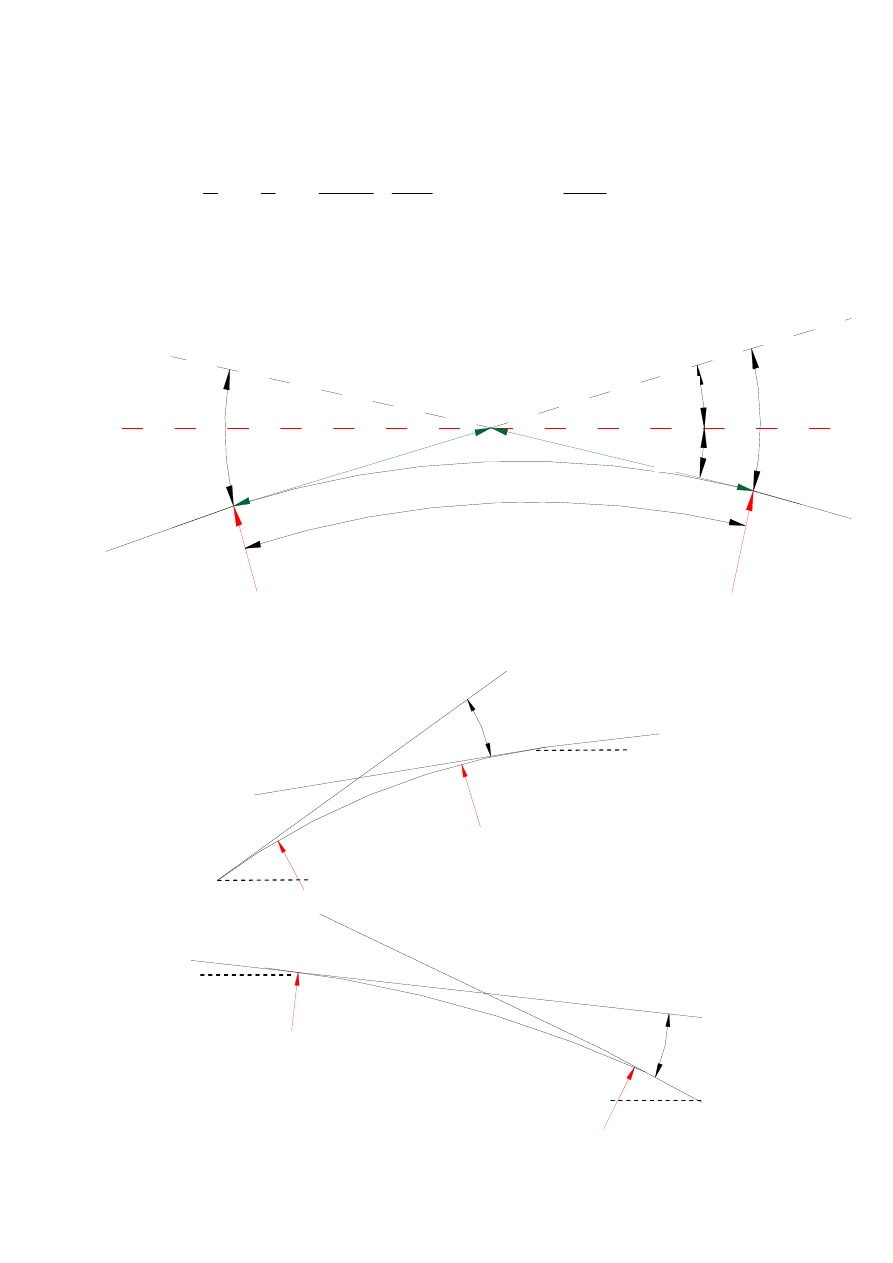
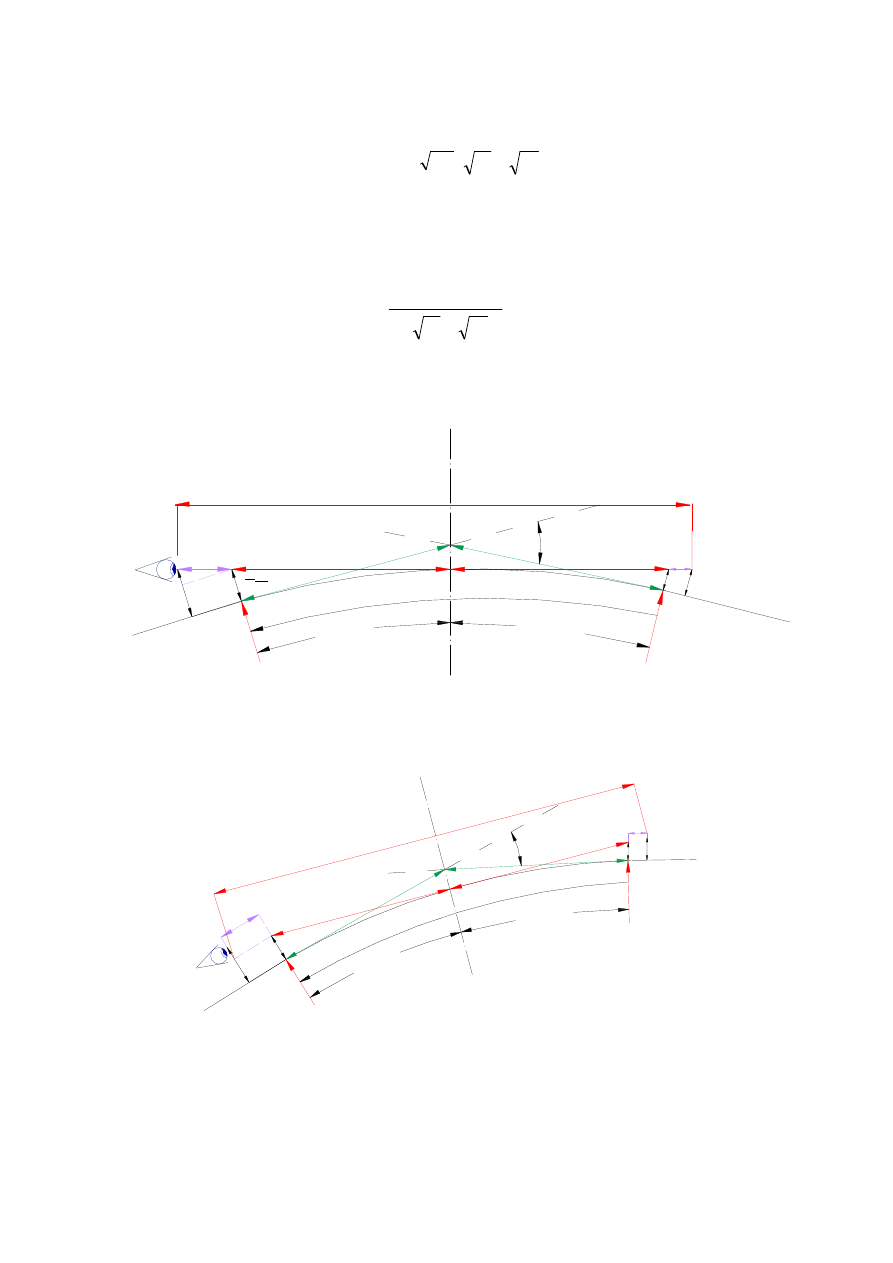
Rys. 1. Załom profilu podłużnego i łuk pionowy wypukły (pochylenia odwrotne)
a) przypadek wzniesienie – wzniesienie
b) przypadek spadek – spadek
Rys. 2. Załomy profilu podłużnego i łuki pionowe wypukłe (pochylenia jednakowego kierunku)
α
α
1
α
2
α
i
1
i
2
t
Ł
R
R
t
i
1
i
2
R
R
α
= α
1
– α
2
α
2
α
1
α
= α
1
– α
2
α
1
i
1
R
R
α
2
i
2
Długość łuku pionowego oblicza się z klasycznego wzoru, uwzględniając małe
wartości kątów:
(
)
2
1
i
i
R
Ł
+
=
[m]
(2)
gdzie:
i
1
i i
2
– pochylenia podłużne, podawane w ułamku dziesiętnym, znak „+” – stosuje się dla
pochyleń odwrotnych, a znak „–” – dla pochyleń jednakowego kierunku, tj. obydwa
pochylenia są wzniesieniami lub obydwa pochylenia są spadkami,
R – promień łuku pionowego, [m].
Dla wypukłych łuków pionowych rozróżnić należy dwa przypadki:
1.
odległość widoczności na zatrzymanie L
z
jest mniejsza od długości łuku
pionowego Ł, czyli L
z
< Ł,
2.
odległość widoczności na zatrzymanie L
z
jest większa od długości łuku
pionowego Ł, czyli L
z
> Ł,
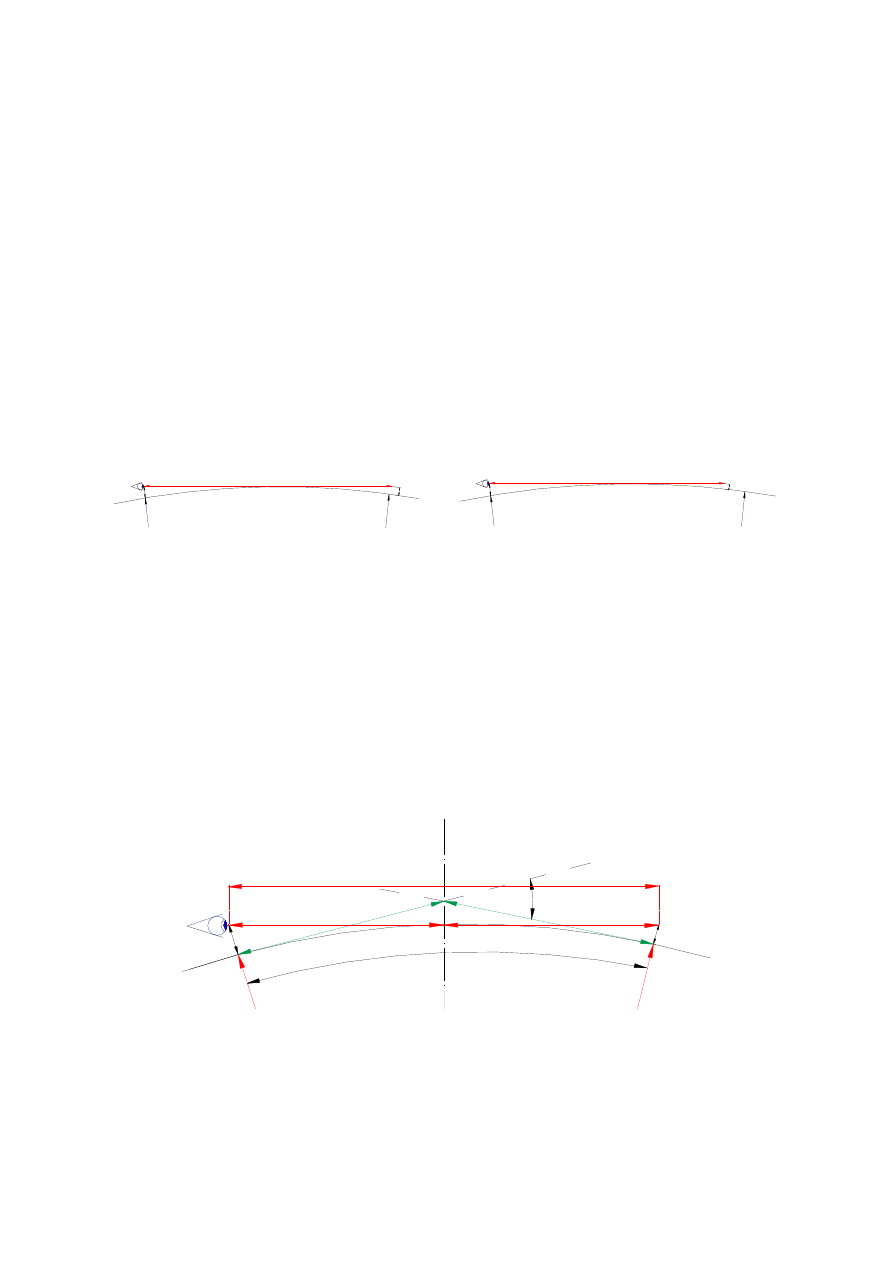
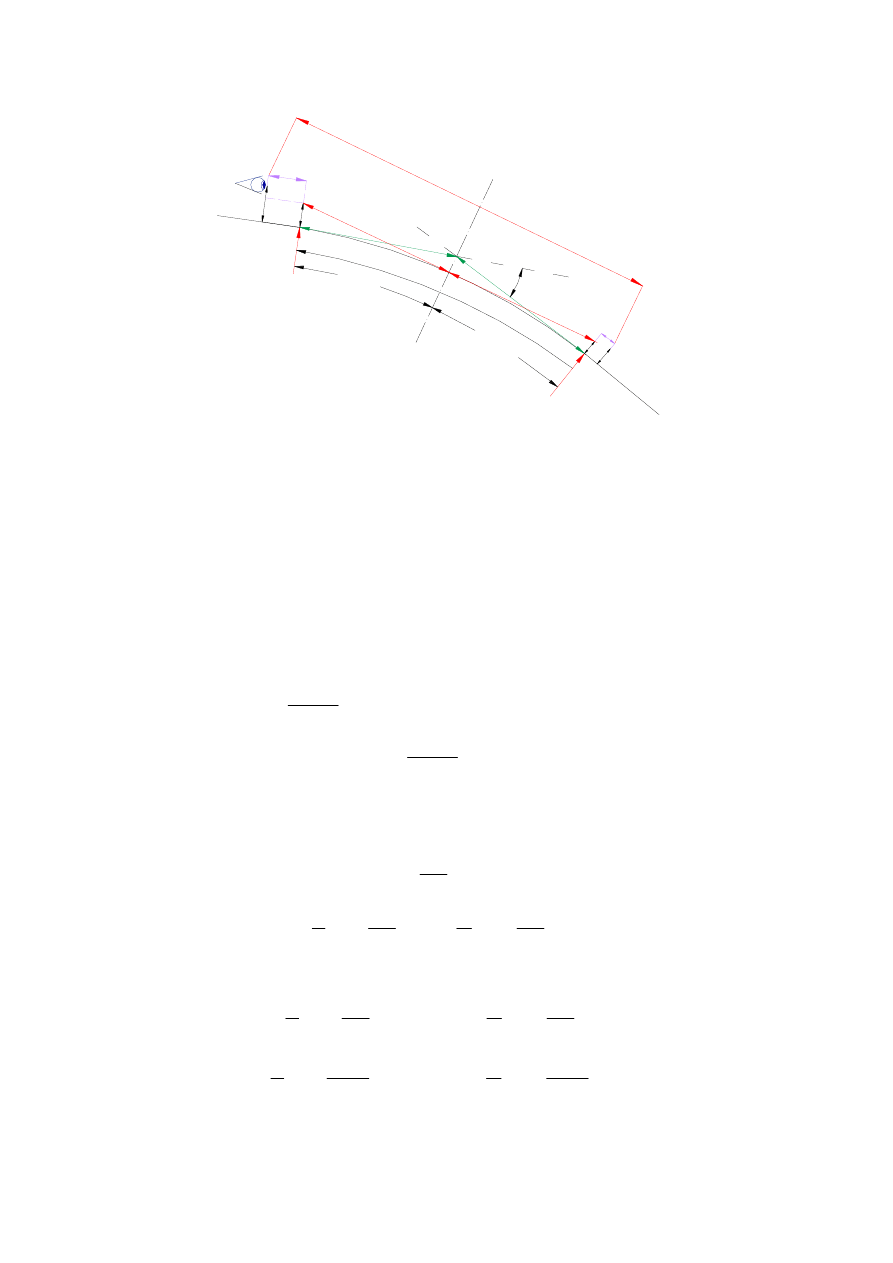
Rys. 3. Dwa przypadki analizy
W przypadku pierwszym, tj. L
z
< Ł wielkość potrzebnego promienia łuku pionowego
R
min
można wyznaczyć wykorzystując podstawowe zależności geometryczne (rys. 4).
(
)
2
1
1
2
2
1
2
2
1
2
h
Rh
R
h
R
R
L
z
+
+
=
+
=
+
gdzie:
R – promień łuku pionowego, [m],
L
z1
– część składowa wymaganej odległości widoczności na zatrzymanie L
z
, [m],
h
1
– wysokość oczu kierowcy nad jezdnią, wg Rozporządzenia MTiGM Dz.U. nr 43 § 168 –
wynosi 1 [m].
Rys. 4. Załom profilu podłużnego i łuk pionowy wypukły (pochylenia odwrotne)
Podobne zależności zachodzą dla pochyleń jednakowego kierunku.
L
z
R
R
h
2
i
1
i
2
L
z1
L
z2
α
Ł
R
R
h
1
h
2
L
z
L
z
R
R
h
2
Rys. 5. Załomy profilu podłużnego i łuki pionowe wypukłe (pochylenia jednakowego kierunku)
Odrzucając wielkość h
1
2
jako małą w stosunku do wielkości R
2
, otrzyma się
następującą zależność:
1
1
2Rh
L
z
=
(3)
Analogicznie postępując i wyprowadzając wzór na druga składową wymaganej
odległości widoczności na zatrzymanie L
z
otrzyma się zależność:
2
2
2Rh
L
z
=
(4)
gdzie:
R – promień łuku pionowego, [m],
L
z2
– część składowa wymaganej odległości widoczności na zatrzymanie L
z
, [m],
h
2
– wysokość celu obserwacji, znajdującego się nad osią ruchu tego samego pasa ruchu co
poruszający się pojazd, zależy od prędkości i jest określona w Rozporządzeniu MTiGM
Dz.U. Dz.U. nr 43 § 168 ustęp 2b.
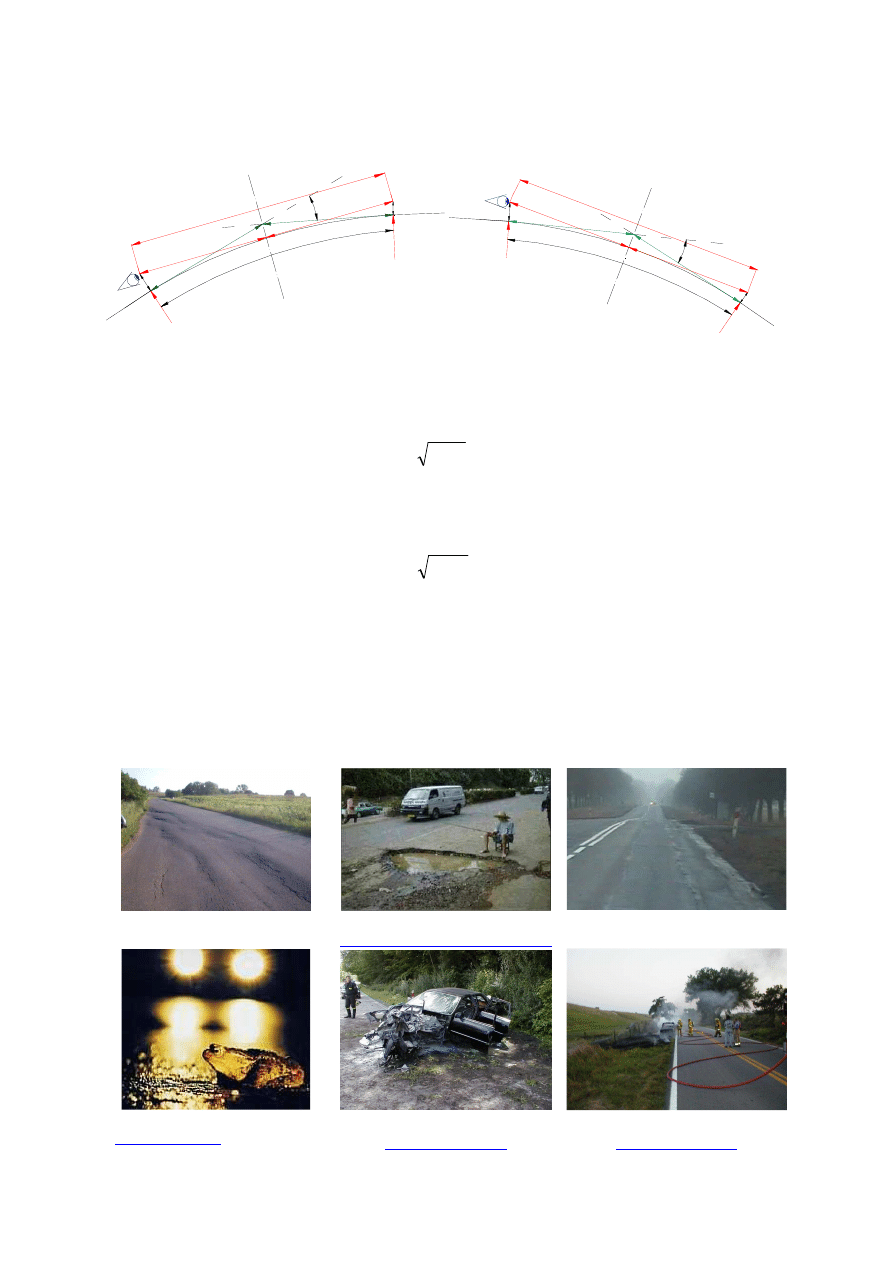
Celem obserwacji może być w przypadku obliczania odległości widoczności na
zatrzymanie L
z
przede wszystkim uszkodzenie nawierzchni, przeszkoda na jezdni (zwalone
drzewo, rozlane paliwo i olej po wypadku, potrącony człowiek, zwierzę itd.).
fot. R. Strzałkowski
zdjęcie ze strony
www.drogowiec.pb.bialystok.pl
droga nr 10 kilometr 74
zdjęcie ze strony
www.ogrodnik.pl
- zielone mosty
zdjęcie ze strony
www.krbrd.gov.pl
zdjęcie ze strony
www.krbrd.gov.pl
i
1
i
2
L
z1
L
z2
α
Ł
R
R
h
1
h
2
L
z
i
1
i
2
L
z1
L
z2
α
Ł
R
R
h
1
h
2
L
z
Odległość widoczności na zatrzymanie L
z
jest sumą dwóch składowych
(
)
2
1
2
1
2
h
h
R
L
L
L
z
z
z
+
=
+
=
(5)
Przekształcając wzór (5) względem promienia łuku R, który zapewnia wymaganą
odległość widoczności na zatrzymanie L
z
, otrzyma się klasyczny wzór podany w książce
„Inżynieria ruchu” autorstwa prof.: St. Datki, W. Suchorzewskiego i M. Tracza.
(
)
2
1
2
min
2
h
h
L
R
z
+
=
(6)
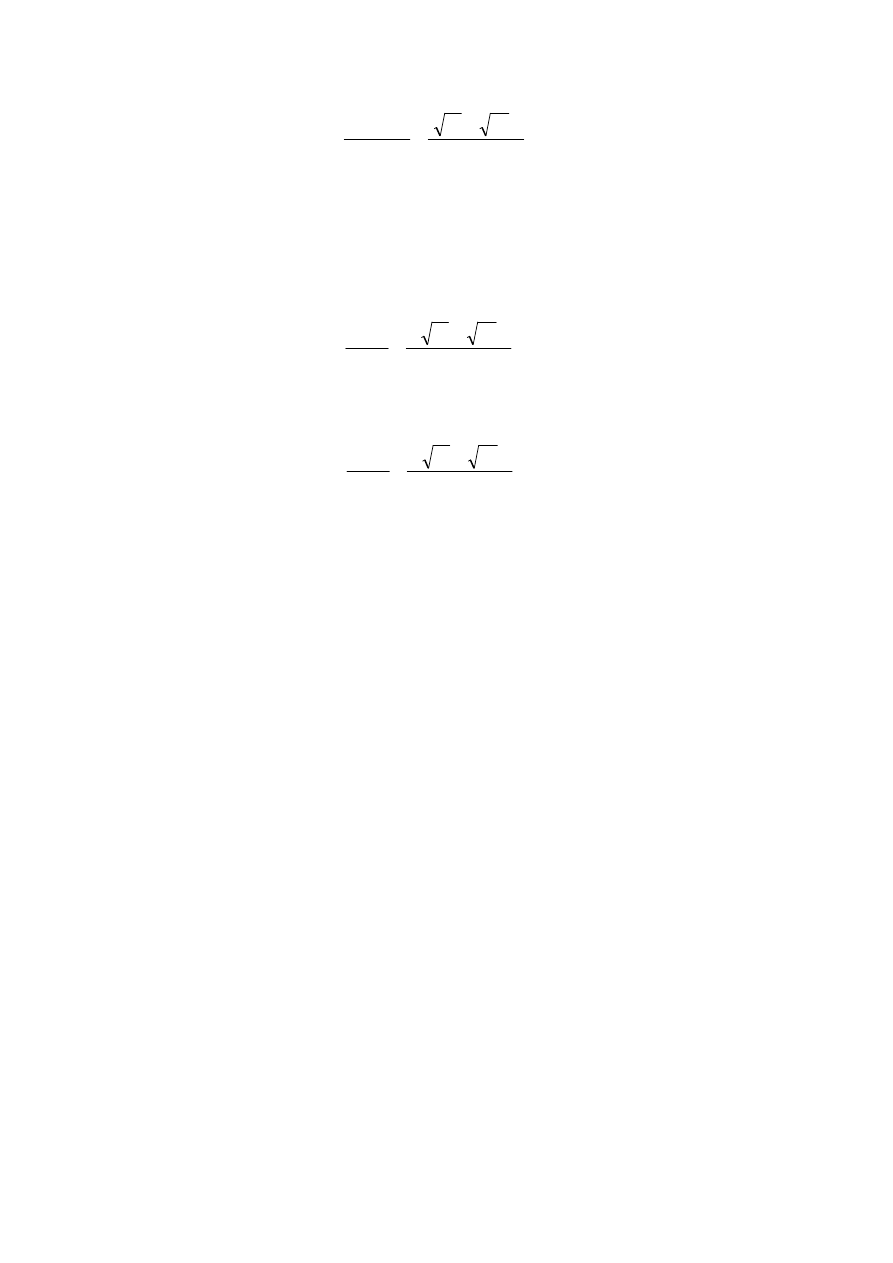
Podobnie należy postąpić, gdy zachodzi drugi przypadek tzn. L
z
> Ł.
Charakterystyczne zależności geometryczne przedstawia rys. 5.
Rys. 6. Załom profilu podłużnego i łuk pionowy wypukły (pochylenia odwrotne)
Podobne zależności zachodzą dla pochyleń jednakowego kierunku.
i
1
i
2
R
R
h
1
x
1
x
2
Ł
L
Z1
L
Z2
L
Z
α
h
2
i
2
R
i
1
R
α
α
2
L
Z1
L
Z2
α
1
x
2
h
1
x
1
h
2
L
Z
L
Z1
2R
Rys. 7. Załomy profilu podłużnego i łuki pionowe wypukłe (pochylenia jednakowego kierunku)
Wielkość potrzebnego promienia łuku pionowego R
min
można wyznaczyć
wykorzystując podstawowe zależności geometryczne (rys. 6).
2
2
1
1
x
L
L
x
L
z
z
z
+
+
+
=
gdzie:
x
1
i x
2
, L
z1
oraz L
z2
– poszczególne części składowe wymaganej odległości widoczności na
zatrzymanie L
z
wynikające z rys. 6, [m].
Z zależności geometrycznych otrzymuje się, że:
1
1
1
1
sin
α
=
−
x
y
h
,
1
1
1
sin
tan
i
=
=
α
α
1
1
1
1
i
y
h
x
−
=
(
)
2
1
2
2
2
1
y
R
R
L
z
+
=
+
2
1
1
2
2
2
1
2
y
Ry
R
R
L
z
+
+
=
+
→
1
2
1
2Ry
L
z
=
R
L
y
z
2
2
1
1
=
−
=
R
L
h
i
x
z
2
1
2
1
1
1
1
,
−
=
R
L
h
i
x
z
2
1
2
2
2
2
2
1
1
i
R
L
z
=
i
2
2
i
R
L
z
=
−
+
+
+
−
=
R
L
h
i
i
R
i
R
R
L
h
i
L
z
z
z
2
1
2
1
2
2
2
2
2
1
2
1
1
1
−
+
+
+
−
=
R
i
R
h
i
i
R
i
R
R
i
R
h
i
L
z
2
1
2
1
2
2
2
2
2
2
1
2
1
2
1
1
x
1
R
R
α
α
1
α
2
L
Z1
h
1
i
1
i
2
h
2
X
2
L
Z2
L
Z
(
)
(
)
2
1
2
2
1
2
1
2
i
i
h
h
i
i
R
L
z
+
+
+
+
=
(7)
Przekształcając wzór (7) względem promienia łuku R, który zapewnia wymaganą
odległość widoczności na zatrzymanie L
z
, otrzyma się klasyczny wzór podany w książce
„Inżynieria ruchu” autorstwa prof.: St. Datki, W. Suchorzewskiego i M. Tracza.
przy załomach odwrotnego kierunku
(
)
(
)
2
2
1
2
2
1
2
1
2
2
i
i
h
h
i
i
L
R
z
+
+
−
+
=
,
przy załomach jednakowego kierunku:
(
)
(
)
2
2
1
2
2
1
2
1
2
2
i
i
h
h
i
i
L
R
z
−
+
−
−
=
(8)
Wyszukiwarka
Podobne podstrony:
luk pionowy wypukly wzor
luk pionowy wypukly wzor
luk pionowy wypukly wzor
luk pionowy wypukly wzor
luk pionowy wypukly
luk pionowy wypukly wzor
105 Łuk swobodnie podparty obciążony prostopadle do swojej płaszczyzny
łuk kołowy
Łuk kołowy
Łuk odruchowy, Biologia
Łuk Konstantyna Wielkiego
28 Test „bolesny łuk”, test Lift off, test Yergasona, test “pustej puszki” – wykonanie i
Test luk
Kae Sa Luk, czyli o jedzeniu oczami
101 Łuk trójprzegubowy
1 Luk elektryczny (1)
luk poprawa(k)
więcej podobnych podstron