POLITECHNIKA ŚLĄSKA
WYDZIAŁ ELEKTRYCZNY
KATEDRA MECHATRONIKI
Instrukcja do ćwiczenia laboratoryjnego
Przedmiot:
Mechatronika
Symbol ćwiczenia:
M1
Tytuł ćwiczenia:
Modelowanie obwodowe silnika VCM
SPIS TREŚCI
Spis treści
1
1.
Cele ćwiczenia
2
2.
Wyposażenie stanowiska
2
3.
Podstawowe wiadomości
2
4.
Formułowanie modelu matematycznego silnika VCM
3
5.
Program ćwiczenia – wykaz zadań do realizacji
6
6.
Raport
6
7.
Pytania
6
Literatura
6
Mechatronika
Modelowanie obwodowe silnika VCM
2
1. CELE ĆWICZENIA
Celem ćwiczenia jest:
sformułowanie i implementacja modelu matematycznego silnika VCM (stosowanego
w dyskach twardych) w programie MATLAB/Simulink,
badanie wpływu zmian parametrów na przebiegi chwilowe przemieszczenia kątowego
i prędkości silnika.
2. WYPOSAŻENIE STANOWISKA
W skład stanowiska wchodzą:
komputer klasy PC z systemem operacyjnym Windows z zainstalowanym
oprogramowaniem Matlab/Simulink ver. 2009a lub nowszym.
3. PODSTAWOWE WIADOMOŚCI
Stosowane w chwili obecnej w dyskach twardych silniki VCM można sklasyfikować
według kilku kryteriów: liczby magnesów trwałych (ich kształtu oraz sposobu
namagnesowania), sposobu wykonania obwodu magnetycznego stojana (z kolumnami lub bez
kolumn), rodzaju zastosowanych łożysk (kulkowe lub pasywne łożyska magnetyczne) oraz
sposobu połączenia z ramieniem aktuatora głowic [1]. Pod względem liczby magnesów
trwałych silniki VCM możemy sklasyfikować w dwóch grupach z pojedynczym,
monolitycznym magnesem trwałym lub z dwoma magnesami trwałymi. Pod względem
sposobu namagnesowania na: symetryczne i niesymetryczne. Do konstrukcji symetrycznych
możemy zaliczyć silniki stosowane w dyskach twardych przykładowo: IBM DeskStar DTLA-
307045 i Maxtor DiamondMax Plus 8 (oba o zbliżonej pojemności 40GB). W dyskach tych,
w pierwszy przypadku mamy do dyspozycji silnik z dwoma magnesami trwałymi, natomiast
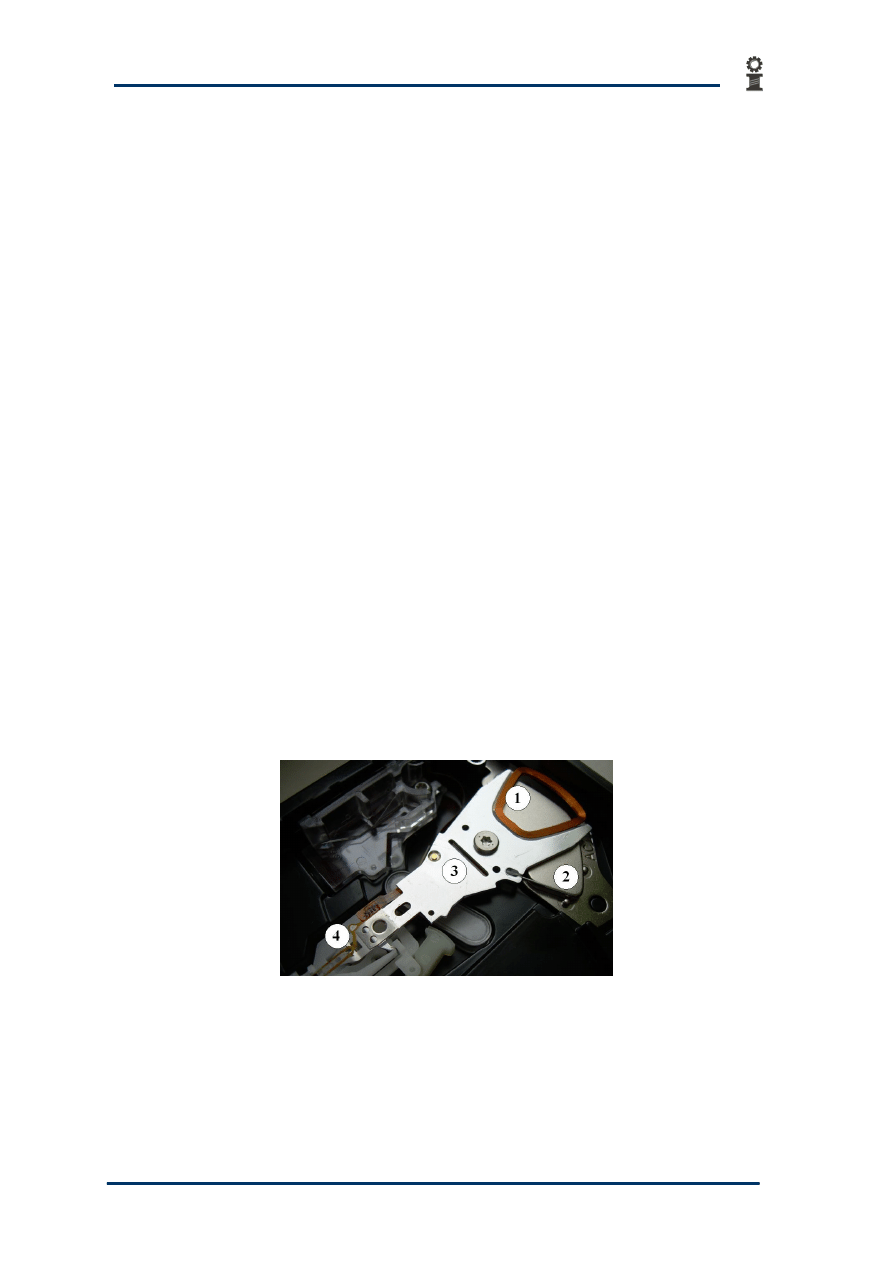
w drugim przypadku – z jednym magnesem trwałym. Wygląd silników VCM stosowanych w
dyskach IBM DeskStar DTLA-307045 i Maxtor DiamondMax Plus 8 przedstawiono na rys.1
oraz rys.2.
Rys. 1. Silnik VCM - (1) oraz (2) i ramię aktuatora głowic - (3) dysku Maxtor DiamondMax Plus 8

Mechatronika
Modelowanie obwodowe silnika VCM
3
Rys. 2. Silnik VCM - (1) i (2) oraz ramię aktuatora głowic - (3) dysku IBM DeskStar DTLA-307045
4. FORMUŁOWANIE MODELU MATEMATYCZNEGO SILNIKA VCM
Model obwodowy silnika VCM składa się z dwóch równań różniczkowych
zwyczajnych, reprezentujących ze sobą wzajemnie sprzężone układy elektryczny i
mechaniczny. Pierwsze równanie związane z obwodem elektrycznym jest równaniem
równowagi napięć, zwykle podawane jest w postaci:
(1)
)
(
d
)
(
d
)
(
)
(
m
e
t
t
i
L
t
Ri
t
u
,
gdzie: u(t) - napięcie zasilające, R, L - rezystancja i indukcyjność cewki silnika, e(
m
) -
napięcie indukowane.
Zazwyczaj napięcie indukowane rozważane jest jako liniowa funkcja prędkości
kątowej wirnika silnika VCM oraz indukcji w szczelinie powietrznej (której rozkład
przyjmowany jest stały – niezależny od pozycji kątowej wirnika). Takie założenia prowadzą
do stałych wartości tzw. stałych: napięciowej K
e
i momentowej K
t
. Takie założenia powodują
stałe, niezmienne własności silnika niezależnie od położenia kątowego wirnika, co jest
sprzeczne z badaniami eksperymentalnymi [1]. W dalszych rozważaniach przedstawiony
zostanie model, który wadę tą eliminuje. W kroku pierwszym zastąpimy rzeczywiste
uzwojenie (rozłożone przestrzennie), uzwojeniem zastępczym złożonym z N nieskończenie
cienkich przewodów. Ponadto zakładamy taki sam rozkład przestrzenny indukcji pod każdym
biegunem magnesu trwałego. Z tych powodów możemy nasze rozważania zawęzić do analizy
zachowania się jednego boku o długości l uzwojenia w polu magnetycznym, schematycznie
prezentowanego na rys. 3.
Rys. 3. Zastępczy bok uzwojenia
Bok uzwojenia o długości l porusza się na promieniu r
1
w polu magnetycznym
niejednorodnym kątowo, ale jednorodnym promieniowo. Przy przemieszczeniu kątowym d
zakreśla pole o powierzchni ds. W boku uzwojenia indukuje się napięcie:
Mechatronika
Modelowanie obwodowe silnika VCM
4
(2)
t
s
B
N
t
e
d
)}
(
)
(
{
d
d
d
,
gdzie: - strumień skojarzony z uzwojeniem, N – liczba zwoi.
Postępując dalej tak samo jak w [1] napięcie w jednym boku uzwojenia, na skutek ruchu w
polu magnetycznym magnesu, może być wyrażone w postaci:
(3)
)
2
(
)
(
)
(
2
2
1
l
l
r
B
B
N
e
m
p
,
gdzie:
p
- podziałka biegunowa magnesu trwałego,
m
– prędkość kątowa wirnika.
Równanie napięciowe (1) po wprowadzeniu napięcia indukowanego (3), w formie
kanonicznej przyjmuje postać:
(4)
)
2
(
)
(
)
(
)
(
)
(
1
)
(
d
d
2
1
l
l
r
B
B
N
t
Ri
t
u
L
t
i
t
m
p
Wyrażenie opisujące moment elektromagnetyczny może być wyznaczone z bilansu
mocy silnika i przybiera postać [1]:
(5)
)
(
)
2
(
)
(
)
(
2
1
t
i
l
l
r
B
B
N
T
p
e
.
Sprzęgnięte z cewką wirnika ramię aktuatora głowic (tzw. E-blok) oraz elementy
zawieszenia głowicy potraktowano jako ciało doskonale sztywne (w rzeczywistość
zawieszenie głowicy jest sprężyste).
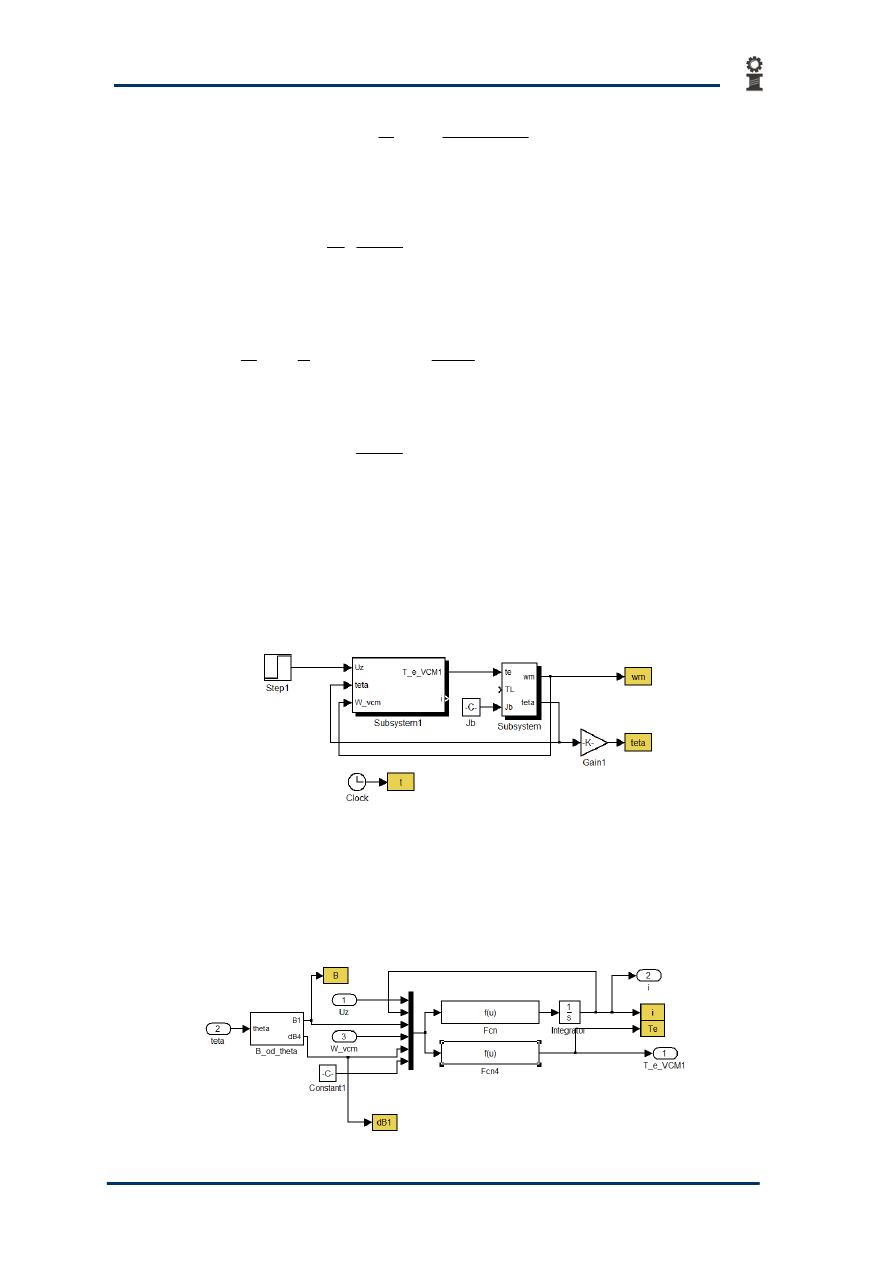
Na rys.4. przedstawiono finalną postać modelu silnika VCM implementowaną w
programie MATLAB/Simulink. Składa się on z dwóch bloków reprezentujących układ
elektryczny silnika („Subsystem1”) oraz układ mechaniczny („Subsystem”). W bloku „Jb”
wprowadzono zastępczy moment bezwładności ramienia E-bloku i układu zawieszeń.
Rys. 4. Schemat blokowy silnika VCM
W bloku „Subsystem1” implementowano prawe strony równań (4) i (5) z wykorzystaniem
bloków nieliniowych „Fcn” – rys.5. W wymienionych równaniach należy dokonać
podstawień za zmienne: napięcie zasilania, prąd, rozkład indukcji, prędkość kątową,
pochodną rozkładu indukcji i rozpiętość kątową uzwojenia – zmienne „u(i)” zgodnie z
porządkiem narzuconym przez multiplekser (pionowa gruba linia na rys.5).
Rys. 5. Sposób implementacji równań (4) – blok „Fcn” i (5) – blok „Fcn4”
Mechatronika
Modelowanie obwodowe silnika VCM
5
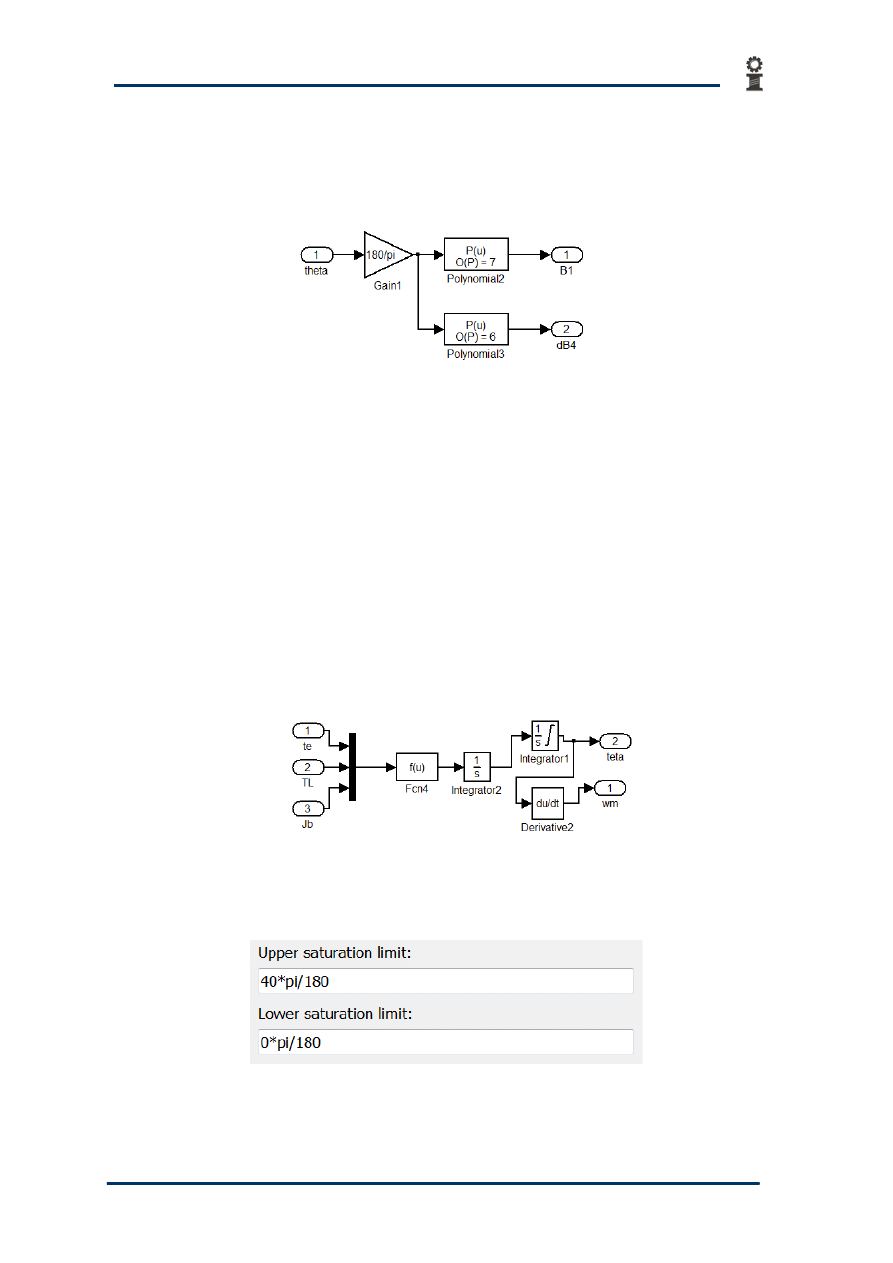
Dodatkowo zachodzi konieczność wprowadzenia do modelu rozkładu indukcji oraz
pochodnej cząstkowej indukcji w postaci funkcji wielomianowych zawartych w bloku
„B_od_theta” na rys.5. Postać wewnętrzną tego bloku przedstawiono na rys.6.
Rys. 6. Funkcje wielomianowe aproksymujące rozkład indukcji oraz pochodnej cząstkowej indukcji po
przemieszczeniu kątowym
Współczynniki wielomianów aproksymujących są następujące:
- dla wielomianu 7 stopnia:
[0.00000000007025, -0.00000001103221, 0.00000069442742, -0.00002293126876,
0.00043487327324, -0.00485977464768, 0.03138970742748, 0.37891219492110]
- dla wielomianu 6 stopnia:
[.49175e-9, -.6619326e-7, .347213710e-5, -.9172507504e-4, .130461981972e-2,-
.971954929536e-2,.3138970742748e-1]
Blok „Subsystem” (z rys.4) modeluje układ mechaniczny – jego postać wewnętrzną
przedstawiono na rys.7.
Rys. 7. Struktura wewnętrzna bloku reprezentującego układ mechaniczny
W bloku „Fcn4” należy wpisać wyrażenie: (u(1)-u(2))/u(3). W bloku integratora „integrator1”
należy wprowadzić ograniczenia zgodnie z rys.8.
Rys. 8. Ograniczenia w bloku integratora

Mechatronika
Modelowanie obwodowe silnika VCM
6
5. PROGRAM ĆWICZENIA – WYKAZ ZADAŃ DO REALIZACJI
W ćwiczeniu należy wykonać następujący harmonogram zadań:
implementować samodzielnie model matematyczny silnika VCM,
wykonać badania: odpowiedzi na skok jednostkowy napięcia przy różnych wartościach
progu oraz różnych masowych momentach bezwładności,
zbadać wpływ zmiany parametrów silnika VCM na odpowiedzi na skok jednostkowy
napięcia zasilającego.
6. RAPORT
Raport z przeprowadzonego ćwiczenia laboratoryjnego powinien zawierać:
opis i rysunki przedstawiające implementowany model silnika,
wyniki badań symulacyjnych,
podsumowanie i wnioski.
7. PYTANIA
Jak zbudowane są silnika VCM?
Do jakich wielkości fizycznych oraz parametrów silnika zależy jego wytwarzany moment
elektromagnetyczny?
Co to jest napięcie indukowane w silniku VCM?
Jak wpływa zamiana masowego momentu bezwładności na odpowiedzi silnika
(przemieszczenie kątowe, prędkość kątową)?
LITERATURA
[1]. Trawiński T.: Verification of the mathematical model of Voice Coil Motor with high
range of angular motion, Research and Education in Mechatronics, KTH, Stockholm,
Sweden, June 15-16, 2006.
Opracowanie: Tomasz Trawiński
Wyszukiwarka
Podobne podstrony:
M1 Modelowanie Obwodowe Silnika VCM
M5 Modelowanie i symulacja silnika wrzecionowego SM
M5 Modelowanie i symulacja silnika wrzecionowego SM
M4 Wyznaczanie charakterystyk kÄ towych momentu rozruchowego silnika VCM
M5 Modelowanie i symulacja silnika wrzecionowego SM
VCM, Sprawka, silniki
Modelowanie procesów przejściowych w silnikach indukcyjnych
2 Modelowanie układów automatyki (silnik elektryczny prądu stałego z magnesem trwałym)
Korczewski, Wirkowski ZAŁOŻENIA DO MODELOWANIA PROCESÓW GAZODYNAMICZNYCH W SPRĘ ŻARKACH SILNIKÓW TUR
METODA OBWODOWO POLOWA WYZNACZANIA CHARAKTERYSTYK STATYCZNYCH JEDNOFAZOWEGO SILNIKA INDUKCYJNEGO Z P
silniki prądu stałego
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
04 Zabezpieczenia silnikówid 5252 ppt
SILNIKI GRAFICZNE W GRACH KOMPUTEROWYCH
modelowanie systemow
modelowanie procesˇw transportowych
więcej podobnych podstron