POLITECHNIKA ŚLĄSKA
WYDZIAŁ ELEKTRYCZNY
KATEDRA MECHATRONIKI
Instrukcja do ćwiczenia laboratoryjnego
Przedmiot:
Mechatronika
Symbol ćwiczenia:
M3
Tytuł ćwiczenia:
Modelowanie
i
symulacja
silnika
wrzecionowego SM
SPIS TREŚCI
Spis treści
1
1.
Cele ćwiczenia
2
2.
Wyposażenie stanowiska
2
3.
Budowa silnika wrzecionowego SM
2
4.
Formułowanie modelu matematycznego silnika SM
3
5.
Implementacja modelu matematycznego silnika SM w naturalnym układzie
współrzędnych
5
6.
Generator o regulowanej częstotliwości i amplitudzie
6
7
Badania symulacyjne silnika SM
6
8
Program ćwiczenia – wykaz zadań do realizacji
7
9.
Raport
7
10.
Pytania
8
Literatura
8
Mechatronika
Modelowanie i symulacja silnika wrzecionowego SM
2
1. CELE ĆWICZENIA
Celem ćwiczenia jest sformułowanie modelu matematycznego silnika wrzecionowego (z
ang. SM - Spindle Motor) i jego implementacja w programie Matlab/Simulink®. Należy
dokonać obliczeń numerycznych w celu określenia podstawowych własności silnika
wrzecionowego SM.
2. WYPOSAŻENIE STANOWISKA
W skład stanowiska wchodzą:
komputer klasy PC z systemem operacyjnym Windows z zainstalowanym
oprogramowaniem Matlab/Simulink ver. 2009a lub nowszym.
3. BUDOWA SILNIKA WRZECIONOWEGO SM
Silnik wrzecionowy to bezszczotkowy silnik prądu stałego wzbudzony od magnesów
trwałych. Silnik wrzecionowy składa się z takich elementów jak: piasta, obwód magnetyczny
składający się z blach ferromagnetycznych i uzwojenia – tworzących stojan, wirnika z
magnesami trwałymi (segmentowymi lub w postaci pierścienia), wału z łożyskami, obudowy
– podstawy, zespołu uszczelnień łożysk (blokujących tzw. mgłę olejową w przypadku łożysk
kulkowych). Nazwa silnik wrzecionowy (z ang. Spindle Motor) wynika z charakterystycznej
konstrukcji wirnika, zazwyczaj trwale połączonego z piastą, na której mocowane są nośniki
magnetyczne – talerze. Występuje wiele różnych rozwiązań konstrukcyjnych silników
wrzecionowych, można je sklasyfikować ze względu na sposób umieszczenia wirnika, rodzaj
stosowanych łożysk, konstrukcję obwodu magnetycznego, sposób zasilania, prędkość
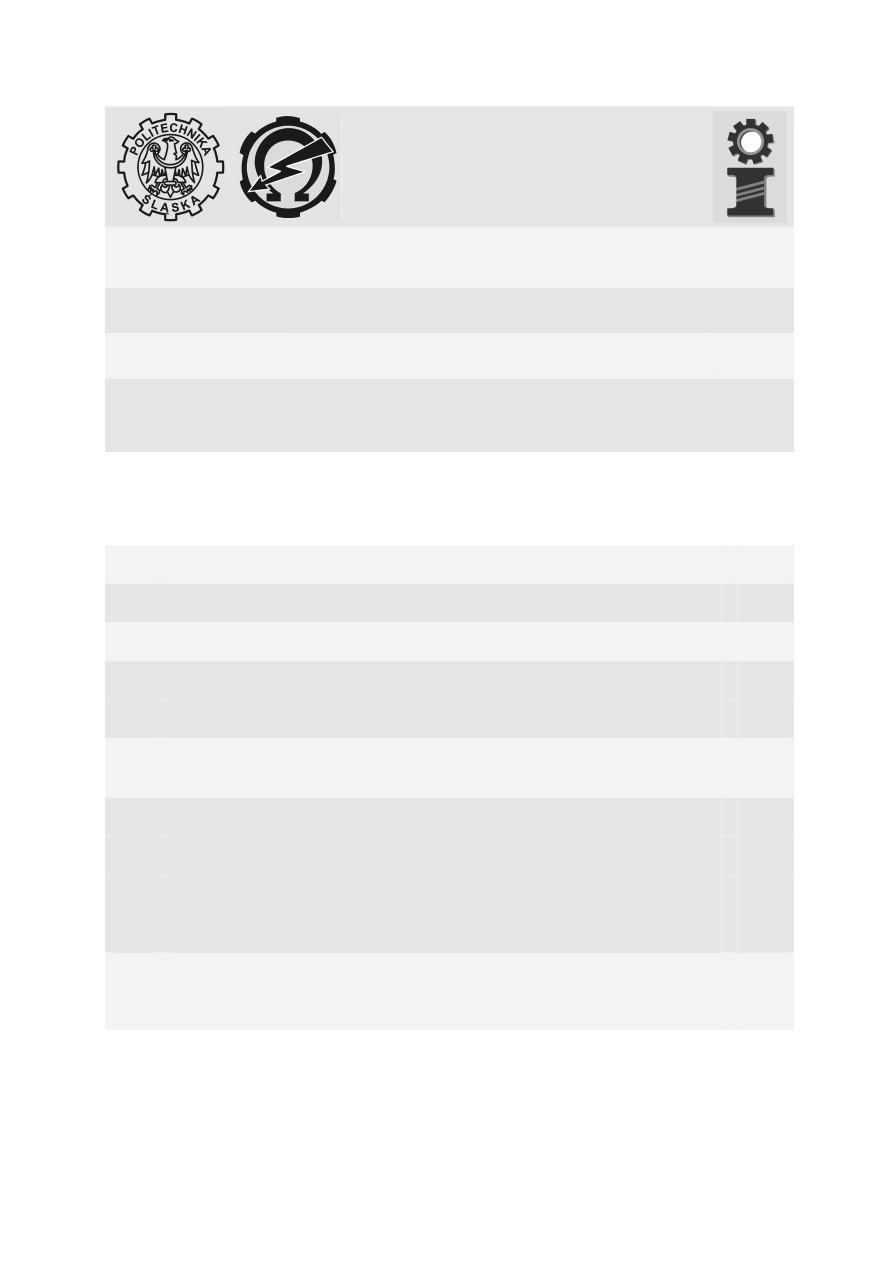
obrotową. Wygląd współczesnego silnika SM przedstawiono na rys.1.
Rys. 1. Silnik wrzecionowy
Na rys.2. przedstawiono powiększony, obwiedziony linią przerywaną, fragment z rys.1.
Piasta – na
której osadzane
są nośniki
Podstawa
Nierucho
my wał
Uszczelnie
nie łożyska
Mechatronika
Modelowanie i symulacja silnika wrzecionowego SM
3
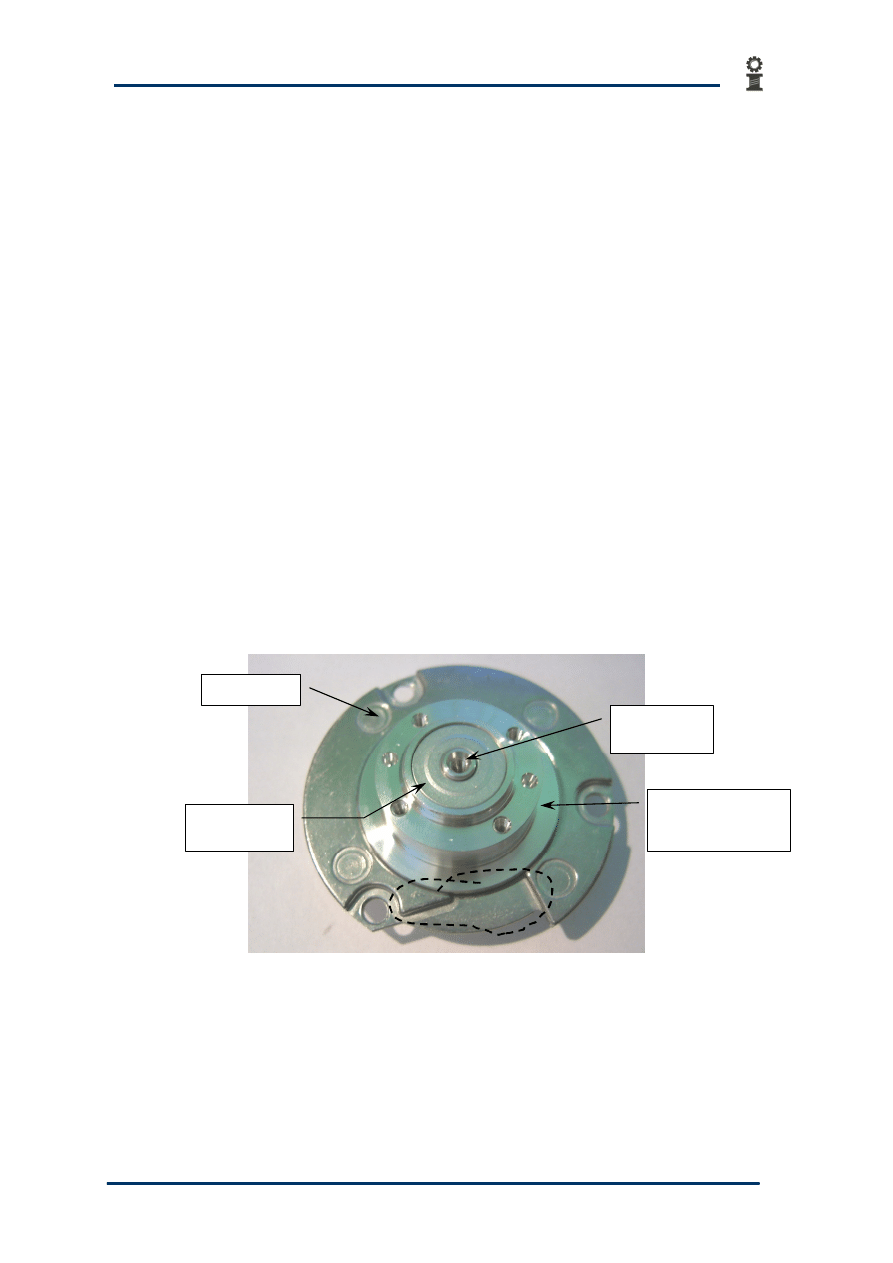
Rys. 2. Silnik wrzecionowy – jarzmo wirnika
Wygląd wewnętrzny silnika SM przedstawiono na rys.3 (jest to silnik innego producenta niż
silniki prezentowane na rys.1 i rys.2.).
Rys. 3. Wygląd wewnętrzny silnika wrzecionowego
4. FORMUŁOWANIE MODELU MATEMATYCZNEGO SILNIKA SM
Obwodowy model matematyczny 3-fazowego silnika wrzecionowego SM w naturalnym –
fazowym układzie współrzędnych, jest dany równaniami napięciowymi dla obwodu stojana:
abc
abc
abc
abc
dt
d
i
R
u
(1)
określającymi stan podukładu elektromagnetycznego silnika, oraz równaniami opisującymi
stan podukładu mechanicznego (uwzględniających jeden stopień swobody ruchu układu
wrzeciona):
L
e
w
m
T
T
J
dt
d
1
;
m
m
dt
d
(2)
gdzie:
abc
u
,
abc
i
– wektor napięć zasilających oraz wektor prądów fazowych silnika
wrzecionowego,
abc
R
- diagonalna macierz rezystancji fazowych silnika wrzecionowego,
abc
- wektor strumieni skojarzonych z uzwojeniami fazowymi stojana,
Jarzmo wirnika –
pierścień
podtrzymujący
pierścień z
magnesem
Piasta
Uzwojenie
stojana –
zazwyczaj
3-fazowe
Pierścień z
magnesem
trwałym
Wgłębienie w które
wchodzi jarzmo
wirnika z
magnesami
Mechatronika
Modelowanie i symulacja silnika wrzecionowego SM
4
m
,
m
,
w
J ,
e
T
,
L
T - mechaniczna prędkość kątowa wirnika, mechaniczny kąt obrotu
wirnika,
zastępczy
moment
bezwładności
układu
wrzeciona,
moment
elektromagnetyczny i moment obciążenia.
Zakładając sinusoidalny rozkład pola wzbudzenia w szczelinie powietrznej, liniowy obwód
magnetyczny to wektor strumieni skojarzonych można przedstawić jako:
abc
f
abc
abc
abc
i
L
(3)
gdzie:
abc
L
- diagonalna macierz indukcyjności własnych uzwojeń faz A, B, C silnika
wrzecionowego,
T
m
b
f
m
b
f
m
b
f
abc
f
p
p
p
3
2
sin
,
3
2
sin
,
sin
- wektor strumienia
wzbudzenia,
m
- mechaniczny kąt obrotu wirnika.
Uwzględniając powyższe zależności i wykonując działania zawarte w równaniu (1), kolejno
otrzymamy:
abc
f
abc
abc
abc
abc
abc
i
L
dt
d
i
R
u
,
3
2
cos
3
2
cos
cos
m
b
f
m
b
m
b
f
m
b
m
b
f
m
b
c
b
a
c
b
a
c
b
a
c
b
a
c
b
a
p
p
p
p
p
p
i
i
i
dt
d
L
L
L
i
i
i
R
R
R
u
u
u
.
Sprowadzając powyższe równania do postaci kanonicznej, otrzymamy układ trzech równań:
3
2
cos
1
3
2
cos
1
cos
1
m
b
f
m
b
c
c
c
c
c
m
b
f
m
b
b
b
b
b
b
m
b
f
m
b
a
a
a
a
a
p
p
i
R
u
L
i
dt
d
p
p
i
R
u
L
i
dt
d
p
p
i
R
u
L
i
dt
d
(4)
Moment elektromagnetyczny T
e
można wyznaczyć z bilansu mocy pobieranej silnika. Po
przekształceniach moment przyjmie postać:
3
2
cos
3
2
cos
cos
m
b
f
c
m
b
f
b
m
b
f
a
b
e
p
i
p
i
p
i
p
T
(5)
Równania (4),(2) i (5) stanowią model matematyczny silnika wrzecionowego w naturalnym –
fazowym układzie współrzędnych.
Mechatronika
Modelowanie i symulacja silnika wrzecionowego SM
5
5. IMPLEMENTACJA MODELU MATEMATYCZNEGO SILNIKA SM W
NATURALNYM UKŁADZIE WSPÓŁRZĘDNYCH
Dokonując zamiany nazw zmiennych w równaniach (4),(2) i (5) (wymóg
oprogramowania) przyjmujemy następujące nazwy zmiennych elektromagnetycznych silnika
SM:
–
c
b
a
u
u
u
,
,
- na odpowiednio -
)
3
(
)
2
(
)
1
(
u
u
u
,
–
c
b
a
i
i
i
,
,
- na odpowiednio -
)
6
(
)
5
(
)
4
(
u
u
u
,
–
,
m
m
- na odpowiednio -
)
8
(
)
7
(
u
u
.
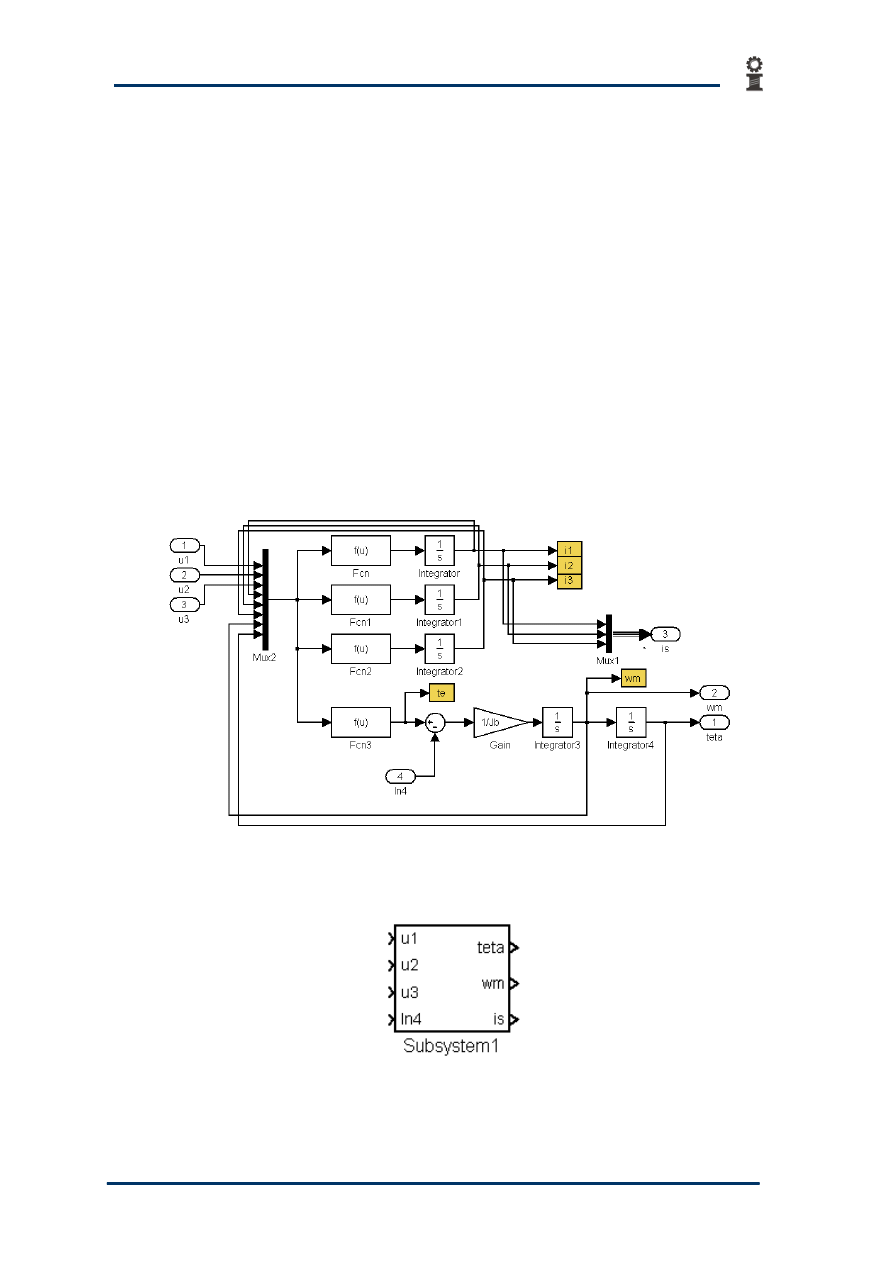
Pozostałe wielkości mogą być podawane w pliku z danymi. Model matematyczny
implementowany w programie Matlab/Simulink® może przyjąć formę graficzną
przedstawioną na rys. 4. Do pierwszych trzech bloków nieliniowych „Fcn” wprowadzono
prawe strony równań (4) (oczywiście po zamianie zmiennych) natomiast do bloku „Fcn4”
wprowadzono równanie na moment elektromagnetyczny silnika. Do portów wejściowych
„u1”, „u2” i „u3” doprowadzone są napięcia zasilające silnik a do portu „In4” moment
obciążenia. Porty „wm”, „teta” i „is” wyprowadzają „na zewnątrz” wartości prędkości
obrotowej, kata obrotu wirnika i wektor prądów stojana.
Rys. 4. Model silnika SM implementowany w Matlabie/Simulinku®
Po zblokowaniu modelu przedstawionego na rys.4. przy pomocy komendy „Create
subsystem” zawartym w polu „Edit”, model przyjmie postać przedstawioną na rys.5.
Rys. 5. Zblokowany model silnika SM
Dodatkowo należy wykonać model generatora zasilającego silnik napięciem 3-fazowym
symetrycznym o regulowanej częstotliwości i amplitudzie.
Mechatronika
Modelowanie i symulacja silnika wrzecionowego SM
6
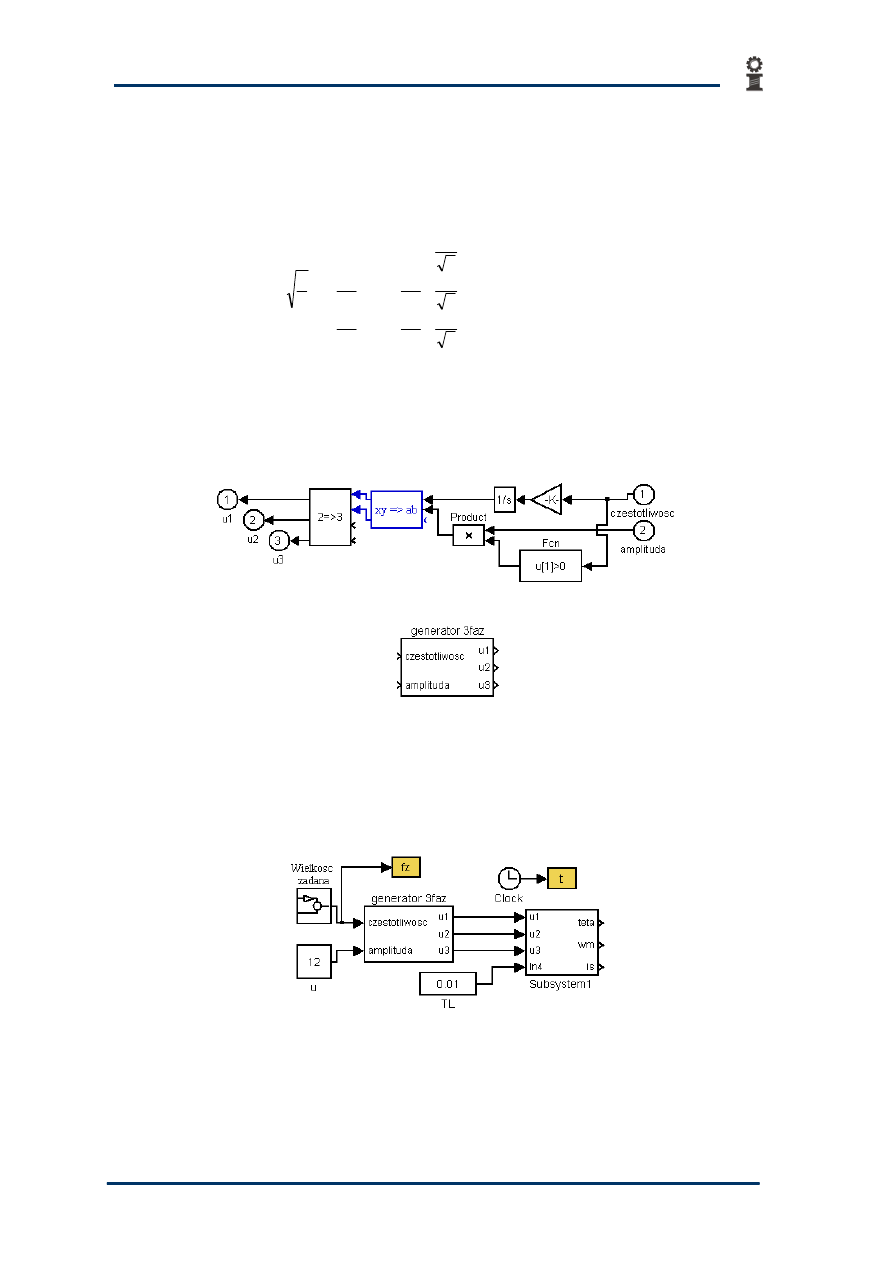
6. GENERATOR O REGULOWANEJ CZĘSTOTLIWOŚCI I AMPLITUDZIE
Na rys.6 przedstawiono blok generatora. Przebieg napięcia jest uzyskiwany dzięki
rozwiązaniu, w każdym kroku całkowania, równań:
0
0
1
0
0
0
cos
sin
0
sin
cos
2
1
3
4
sin
3
4
cos
2
1
3
2
sin
3
2
cos
2
1
0
sin
0
cos
3
2
3
2
1
U
u
u
u
g
g
g
(6)
fdt
2
(7)
Generator do wytworzenia przebiegów napięciowych wykorzystuje złożenie dwóch
transformacji: odwrotnej transformacji z układu dwuosiowego do układu trójfazowego (blok
„2=>3”) i transformacji obrotu (blok „xy=>ab”). Argumentami wejściowymi są amplituda
napięcia U i częstotliwość f (kąt obrotu
- po scałkowaniu).
Rys. 6. Implementacja modelu generatora przebiegu 3-fazowego o regulowanej amplitudzie i częstotliwości
Po zblokowaniu model generatora powinien przybrać formę przedstawioną na rys.7.
Rys. 7. Generator 3-fazowy
7. BADANIA SYMULACYJNE SILNIKA SM
Łącząc bloki silnika wrzecionowego SM i generatora 3- fazowego oraz uzupełniając układ
o zadajniki częstotliwości i amplitudy - układ gotowy do badań symulacyjnych przyjmie
postać przedstawioną na rys.8.
Rys. 8. Model silnika SM wraz z układem zasilania
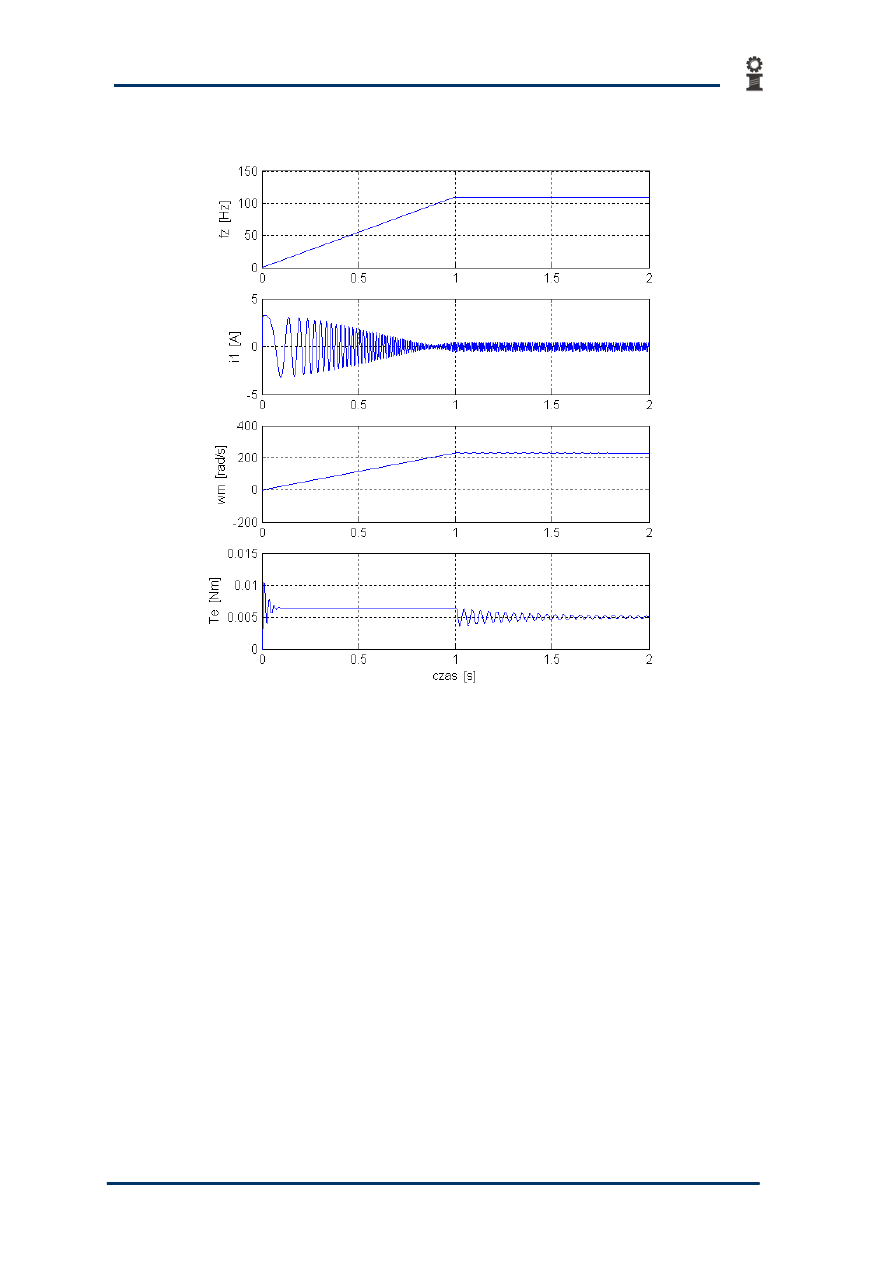
Przykładowe wyniki badań symulacyjnych przy założeniu jednakowych wartości rezystancji i
indukcyjności fazowych silnika i przy danych:
R1=3; L1=0.004; Jb=0.000006; pb=3; Psipm=0.015 (strumień wzbudzenia), TL=0.005
Mechatronika
Modelowanie i symulacja silnika wrzecionowego SM
7
oraz przy założeniu, że częstotliwość napięcia generatora narasta (od zera do wartości
maksymalnej 110 Hz) w ciągu 1s, przedstawiono na rys.9.
Rys. 9. Przykładowe wyniki symulacji
8. PROGRAM ĆWICZENIA – WYKAZ ZADAŃ DO REALIZACJI
W ćwiczeniu należy wykonać następujący harmonogram zadań:
implementować samodzielnie model matematyczny silnika,
wykonać badania: odpowiedzi na skok jednostkowy napięcia zadanego na jedną fazę
silnika SM,
zbadać zachowanie się silnika zasilanego z generatora.
9. RAPORT
Raport z przeprowadzonego ćwiczenia laboratoryjnego powinien zawierać:
opis i rysunki przedstawiające implementowany model silnika,
wyniki badań symulacyjnych,
podsumowanie i wnioski.

Mechatronika
Modelowanie i symulacja silnika wrzecionowego SM
8
10. PYTANIA
Jak zbudowane są silniki SM?
Do jakich wielkości fizycznych oraz parametrów silnika zależy jego wytwarzany moment
elektromagnetyczny?
Co to jest napięcie indukowane w silniku SM?
Jak wpływa zamiana masowego momentu bezwładności na odpowiedzi silnika
(przemieszczenie kątowe, prędkość kątową) zasilanego z generatora?
LITERATURA
[1]. Kielan P., Trawiński T.: Wykorzystanie pakietu Matlab/Simulink do badań możliwości
sterowania silnikami w zamkniętej przez sieć Internet pętli sprzężenia zwrotnego.
Przegląd Elektrotechniczny, ISSN 0033-2097, s. 61-64, R. 86 NR 12/2010.
[2]. Kołton W., Trawiński T.: Badania drgań silników wrzecionowych pamięci masowych,
XXI
Sympozjum
Środowiskowe
PTZE,
Lubliniec
2011,
PRZEGLĄD
ELEKTROTECHNICZNY (Electrical Review), ISSN 0033-2097, R. 87 NR 12b/2011,
s.188-191.
Opracowanie: Tomasz Trawiński
Wyszukiwarka
Podobne podstrony:
M5 Modelowanie i symulacja silnika wrzecionowego SM
M5 Modelowanie i symulacja silnika wrzecionowego SM
,Modelowanie i symulacja system Nieznany (3)
Modelowanie i symulacja procesów elektrycznych w obwodzie z lampą rtęciową
Modelowanie i symulacja prostych układów elektrycznych w programie?SPOC
,Modelowanie i symulacja system Nieznany (2)
Modelowanie symulacyjne pytania
Cad modelowanie symulacyjne egz Nieznany
,Modelowanie i symulacja system Nieznany (4)
Modelowanie i symulacja wykład 5
04 Modelowanie i symulacja komputerowa
,Modelowanie i symulacja system Nieznany (7)
M1 Modelowanie Obwodowe Silnika VCM
Modelowanie i symulacja
,Modelowanie i symulacja system Nieznany (3)
pietroń, modelowanie symulacyjne, zmienna losowa
MODELOWANIE, SYMULACJA ADHOC
więcej podobnych podstron