
2014-11-17
1
Śledzenie użytkownika w wirtualnym
świecie
Rodzaje systemów nawigacyjnych:
• Mechaniczny
• Elektromagnetyczny
• Ultradźwiękowy
• Optyczny
• Inercyjne
• Inne – np. algorytmy
rozpoznawania
System pozycjonowania
mechanicznego
Zalety:
•wydajność
•precyzja
•rozdzielczość
Wady:
•Ograniczona liczba stopni
swobody
•Niewygodny uchwyt
Mechaniczne pozycjonowanie
• Animazoo – Gypsy 7
– 14 czujników
– Dokładność (rozdzielczość 0.125°)
– Niezależne przetwarzanie każdego przegubu
– Wprowadzane małe zakłócenia do informacji
przesyłanych
Typy systemów nawigacyjnych:
Pozycjonowanie elektromagnetyczne
•Prąd zmienny – zmienne pole magnetyczne
(dobra jakość sygnału)
•Prąd stały- statyczne pole magnetyczne
(słabe pole magnetyczne, stabilniejsze w
obecności metalowych elementów)
Zalety:
1.Free-flying
sensor
2.Magnetic field
penetrates
objects between
sender and
receiver
3.All attitude (six
degrees of
freedom)
4.Very small and
light weight
receivers
5.Very high
resolutions
achievable under
controlled
conditions (0.2
mm, 0.1 degree)
Wady:
1.Cabled sensor
2.Expensive
instrumentation
3.Limited field of
operation (3x3x3
meters)
4.AC version is very
sensitive for
distortions caused by
metallic objects in
the measure area
5.Sensitivity for
electromagnetic
devices (video
beamers, CRT)
6.May cause damage
to HF electronic
devices
Typy systemów nawigacyjnych:
pozycjonowanie ultradźwiękowe
Zalety:
- free-flying sensor
- 3-6 degrees of freedom devices
available
- small and light weight sensors (sender)
- high resolutions achievable for relative
movements
- quite cheap technology
Spatial
relationships of
the receiver
arrangement is
known from
manufacturing
process
Wady:
- operates often within a hemispheric
environment only
- echo-reflecting environment can cause
trouble under measurement
- external high frequency sound sources can
cause problems
- limited range of operation
- sample rate degrades with distance
- line-of-sight problem
2014-11-17
2
Typy systemów nawigacyjnych:
optyczne, np. światło podczerwone
Wady:
- Czujniki aktywne wyposażone w przewód
- Problem linii widoczności
- Obiekty odbijające w otoczeniu mogą
powodować błędu
- Wiele innych źródeł podczerwieni może
zakłócać pracę systemu pomiarowego
(
np. pilot
)
- Inne urządzenia sterowane przez
podczerwień mogą być zakłócane przez
nawigator
Zalety:
- Wygodne czujniki pasywne
- 3 - 6 stopni swobody
- Dość wysoka rozdzielczość w
ograniczonym obszarze pracy
- Odpowiednie do szerokiego obszaru
śledzenia
-Skuteczna metoda pomiaru
-Odpowiednia cena
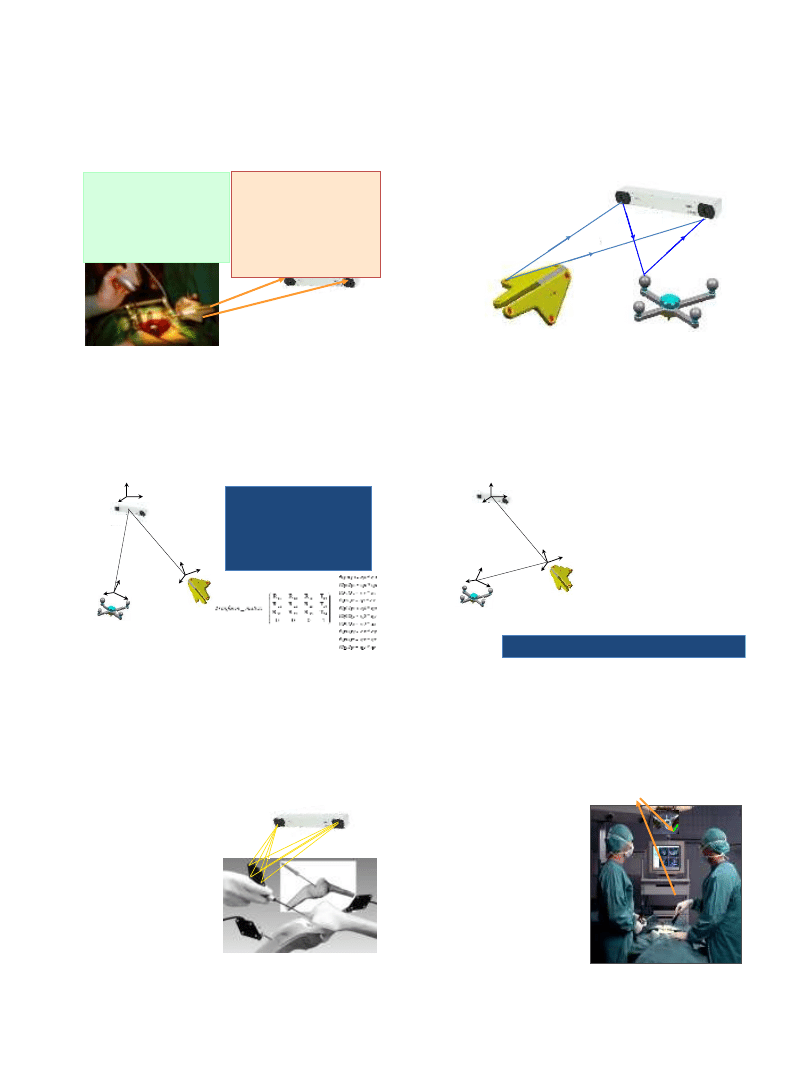
System nawigacyjny Polaris, NDI
Kamera na podczerwień
Rigid Body:
Aktywne i Pasywne
Transformacja układu współrzędnych
Translacja,
Rotacja
Translacja,
Rotacja
Polaris wysyła do komputera:
•Wektor translacji
•Kwaterniony: q0, qx, qy, qz definują
macierz rotacji
•Wartość RMS – odchylenie standardowe,
wprowadzane przez algorytm Best-Fit-
Algorithm odnoszący obserwowane punkty
(diody, kuleczki) do danych kalibracji
fQzQz
fQyQy
-
fQxQx
-
fQ0Q0
fQyQz))
(fQ0Qx
*
(2.0
fQxQz))
(-fQ0Qy
*
(2.0
fQyQz))
(-fQ0Qx
*
(2.0
fQzQz
-
fQyQy
fQxQx
-
fQ0Q0
fQxQy))
(fQ0Qz
*
(2.0
fQxQz))
(fQ0Qy
*
(2.0
fQxQy))
(-fQ0Qz
*
(2.0
fQzQz
-
fQyQy
-
fQxQx
fQ0Q0
Referencyjny układ współrzędnych
Translacja,
Rotacja
Translacja,
Rotacja
Narzędzie
Referencja
Zdefiniowanie transformacji:
Układ współrzędnych kamery – Układ
współrzędnych referencyjnego rigid body
Można zdefiniować współrzędne ruchu
narzędzia w referencyjnym układzie
współrzędnych
USTALIĆ LOKALNY UKŁAD WSPÓŁRZĘDNYCH ABY
SKOMPENSOWAĆ MOŻLIWY RUCH NAWIGATORA LUB OBIEKTU
KAMERA
Komputerowe wspomaganie zabiegów
• Narzędzia chirurgiczne
wyposażone w czujniki
podczerwone.
• Dodatkowe czujniki montuje się
na ciele pacjenta.
• Kamera na podczerwień śledzi
ruch narzędzi chirurgicznych w
odniesieniu do anatomii pacjenta.
Nawigacja w chirurgii
• Nawigacja wspomagana obrazami
– Obrazy uzyskiwane
przedoperacyjnie
– W czasie zabiegu:
• Rejestracja punktów
charakterystycznych.
• Określenie transformacji
pomiędzy przestrzenią
punktów na pacjencie w relacji
do przestrzeni punktów na
obrazie.
• Ruch narzędzia jest
prezentowany na ekranie.

2014-11-17
3
Śledzenie ruchu ręki, twarzy, oczu…
• Żyroskopy
• Akcelerometry
• Tensometry
• Kamery
Inne
Ręka
Ręka i rękawice
Oczy i głowa
Systemy „nawigacji” (wskazywania)

2014-11-17
4
Możliwości śledzenia ruchu
Wyszukiwarka
Podobne podstrony:
4 mapa nawigacyjna id 37741 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
Misc3 id 302777 Nieznany
cw med 5 id 122239 Nieznany
D20031152Lj id 130579 Nieznany
więcej podobnych podstron