1
Roboty Przemysłowe
3. Parametry i charakterystyki robotów
Charakterystyka przestrzeni roboczej – zasady wyznaczania
orientacji chwytaka w przestrzeni roboczej przy wykorzystaniu
przekształcenia jednorodnego – kąty Eulera RPY
1. Podstawy teoretyczne
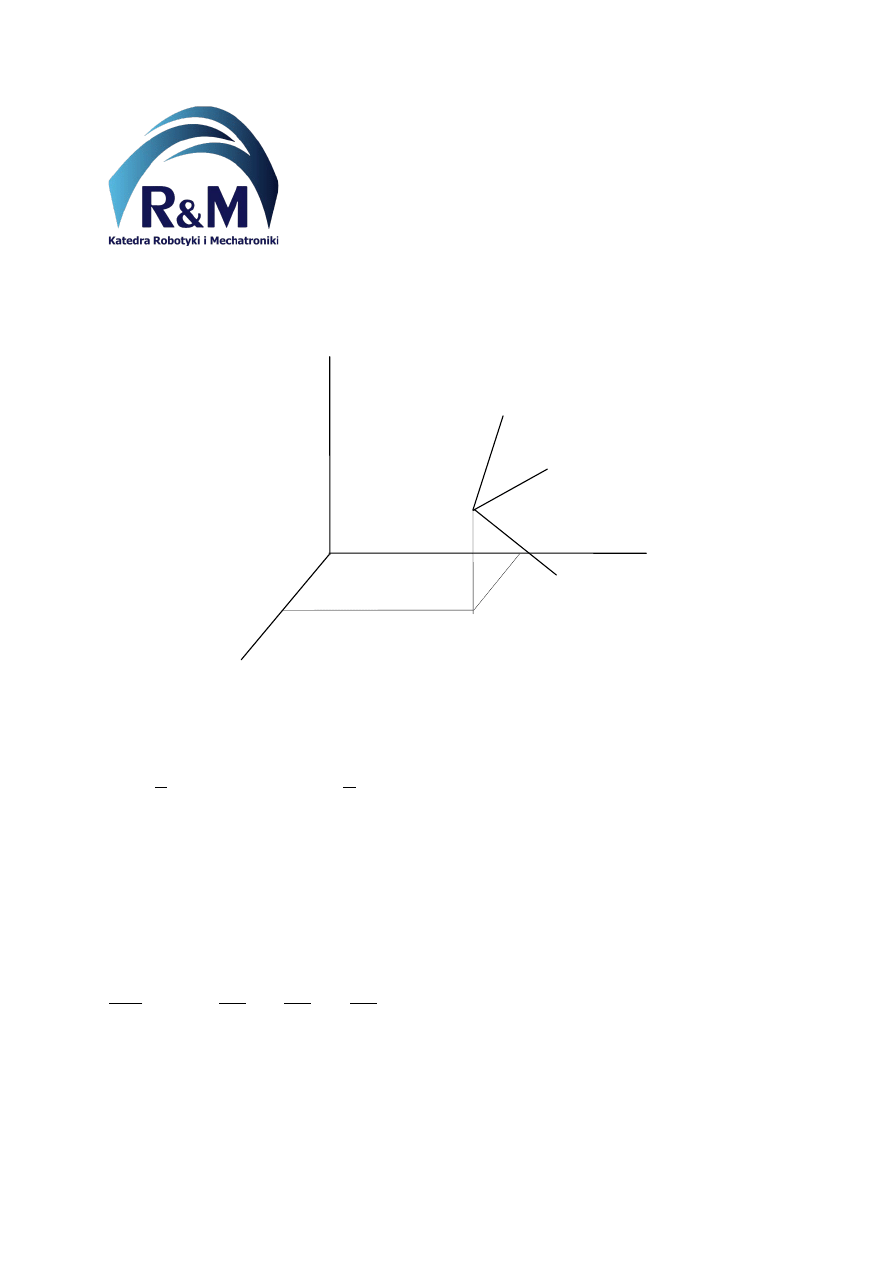
Rys. 1. Wzajemne położenie i orientacja układów współrzędnych odniesienia Oxyz
i lokalnego Puvw
𝐴 = �
𝑢
𝑥
𝑣
𝑥
𝑤
𝑥
𝑥
𝑝
𝑢
𝑦
𝑣
𝑦
𝑤
𝑦
𝑦
𝑝
𝑢
𝑧
𝑣
𝑧
𝑤
𝑧
𝑧
𝑝
0
0
0
1
� 𝑅 = �
𝑢
𝑥
𝑣
𝑥
𝑤
𝑥
𝑢
𝑦
𝑣
𝑦
𝑤
𝑦
𝑢
𝑧
𝑣
𝑧
𝑤
𝑧
� = �
𝚤̂
𝑥
∘ 𝚤̂
𝑢
𝚤̂
𝑥
∘ 𝚥̂
𝑣
𝚤̂
𝑥
∘ 𝑘�
𝑤
𝚥̂
𝑦
∘ 𝚤̂
𝑢
𝚥̂
𝑦
∘ 𝚥̂
𝑣
𝚥̂
𝑦
∘ 𝑘�
𝑤
𝑘�
𝑧
∘ 𝚤̂
𝑢
𝑘�
𝑧
∘ 𝚥̂
𝑣
𝑘�
𝑧
∘ 𝑘�
𝑤
�
Macierz przekształcenia jednorodnego A opisuje położenie i orientacje układu lokalnego
Puvw
w układzie odniesienia Oxyz. Macierz R jest tzw. macierzą rotacji i opisuje orientację
układu lokalnego Puvw w układzie odniesienia Oxyz. Wektory: i, j, k oznaczają wersory
układów współrzędnych Oxyz i Puvw.
Macierz przekształcenia jednorodnego odpowiadająca obrotom o kąty RPY: przechylania
(ang. Roll) -
φ, pochylenia (ang. Pitch) - θ
i skręcenia (ang. Yaw) - ψ jest postaci:
RPY
Rot z
Rot y
Rot x
C C
S C
C S S
S S
C S C
S C
C C
S S S
C S
S S C
S
C S
C C
( , , )
( , )
( , )
( , )
φ θ ψ
φ
θ
ψ
φ θ
φ ψ
φ θ ψ
φ ψ
φ θ ψ
φ θ
φ ψ
φ θ ψ
φ ψ
φ θ ψ
θ
θ ψ
θ ψ
=
=
=
−
+
+
+
−
+
−
0
0
0
0
0
0
1
x
y
z
u
v
w
O
P
2
Porównanie wyrazów tej macierzy z ogólną postacią macierzy przekształcenia
jednorodnego A:
=
1
0
0
0
z
z
z
z
y
y
y
y
x
x
x
x
P
A
O
N
P
A
O
N
P
A
O
N
A
pozwala znaleźć wartości kątów Eulera RPY wg wzoru:
poza przypadkiem gdy: N
x
=0 i N
y
=0 (oraz O
z
=0, A
z
=0), wtedy występują 2 możliwości:
o
90
=
θ
o
90
−
=
θ
(
)
(
)
y
x
O
O
=
−
=
−
φ
ψ
φ
ψ
cos
sin
(
)
(
)
y
x
O
O
=
+
=
+
−
φ
ψ
φ
ψ
cos
sin
y
x
O
O
arctg
=
−
φ
ψ
y
x
O
O
arctg
−
=
+
φ
ψ
Wykonanie obrotów układu odniesienia względem jego osi kolejno o kąty: ψ, θ, φ pozwala
wskazać orientacje osi układu reprezentowanego przez przekształcenie RPY(φ, θ, ψ) w
układzie odniesienia.
2.
Uwagi do sporządzenia sprawozdania
W sprawozdaniu z wykonania zadania nr 2 należy zamieścić narysowany układ końcowy
z translacją i rotacją oraz na osobnej kartce narysowane kolejne przekształcenia układu
odniesienia.
z
z
z
z
x
y
A
O
arctg
N
N
arctg
N
N
arctg
=
−
−
=
=
ψ
θ
φ
2
1
Document Outline
Wyszukiwarka
Podobne podstrony:
eksploracja lab03, Lista sprawozdaniowych bazy danych
BO Lab03
lab03
Lab03
eksploracja-lab03 Ps 03
eksploracja-lab03 Opis bazy danych Document Understanding
Lab03 Switched LANs
infa, Inf Lab03
Inf Lab03
PS lab03 mini lecture (DFT2)
java lab03 initialization
Lab03
Inf Lab03
ADINA84 4rok Lab03
Lab03 Sprawozdanie id 258792 Nieznany
access st2008z lab03 relacje normalizacja
eksploracja lab03, Opis bazy danych Document Understanding
Inf Lab03 DODATEK NWD
więcej podobnych podstron