Katedra Energoelektroniki,
Napędu Elektrycznego i Robotyki
Laboratorium Sterowników Programowalnych SIMATIC
1
Gliwice 2011-03-14
GRUPA
Temat i Autor
MT
Podstawy programowania w środowisku
Step 7
Krzysztof Bodzek, Arkadiusz Domoracki
CEL ĆWICZENIA
1. Poznanie narzędzia Totally Integration Automation Portal
2. Konfiguracja sterownika
3. Podstawowe instrukcje języka drabinkowego
1.
Zakładanie nowego projektu (konfiguracja sterownika)
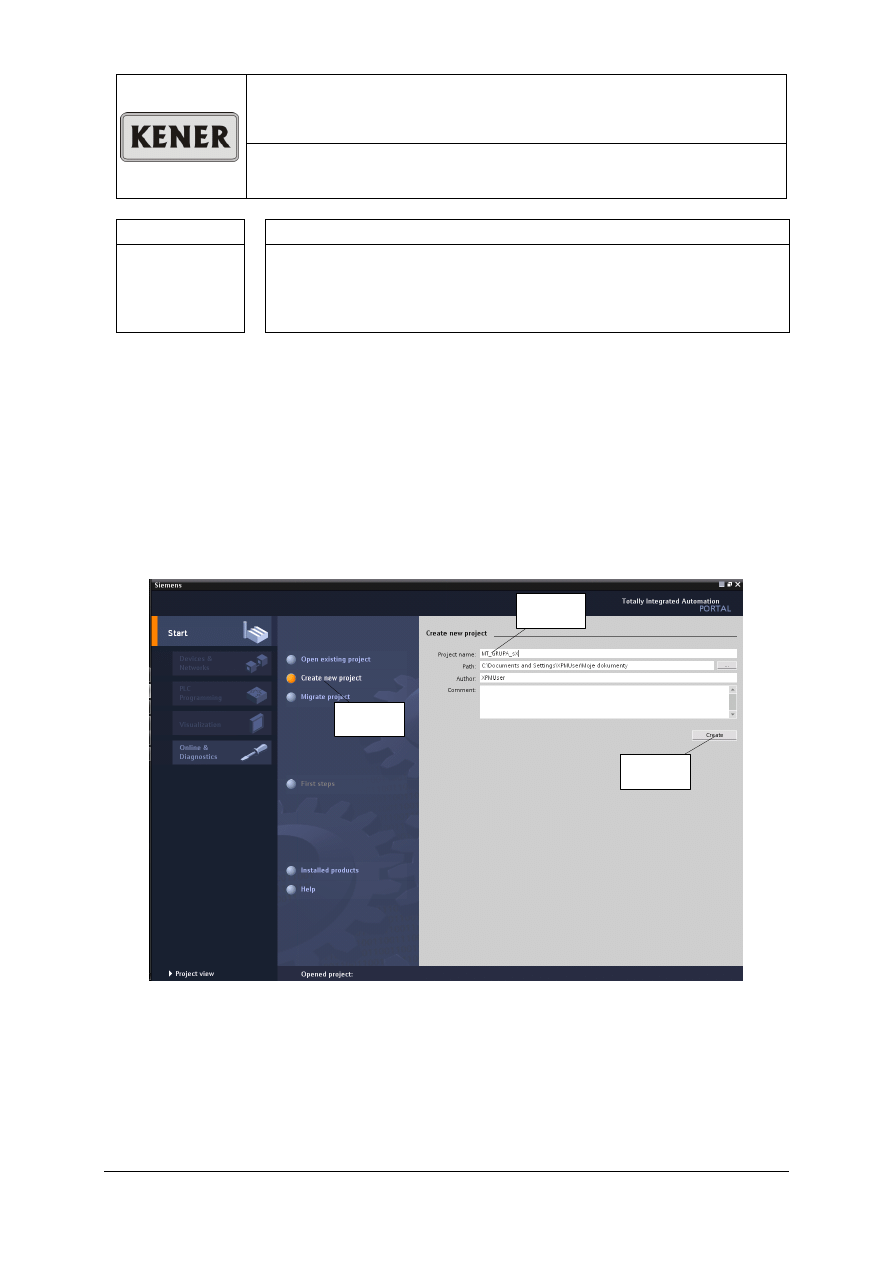
Uruchomić narzędzie Totally Integration Automation Portal.
1
2
3
1. Kliknij „Create new Project”
2. Wstaw nazwę projektu: MT_GRUPA_sX
3. Utwórz projekt „Create”

Katedra Energoelektroniki,
Napędu Elektrycznego i Robotyki
Laboratorium Sterowników Programowalnych SIMATIC
2
Gliwice 2011-03-14
4
5
6
7
8
9
4. Wybierz zadanie „Devices & Networks”
5. Wybierz „Add new devices”
6. Wstaw nazwę „MY_PLC”
7. Z katalogu urządzeń wybierz: „Unspecified CPU 1200 -> 6ES7 2XX-XXXX-XXXX”
8. Zaznacz „Open device View”
9. Dodaj PLC
10
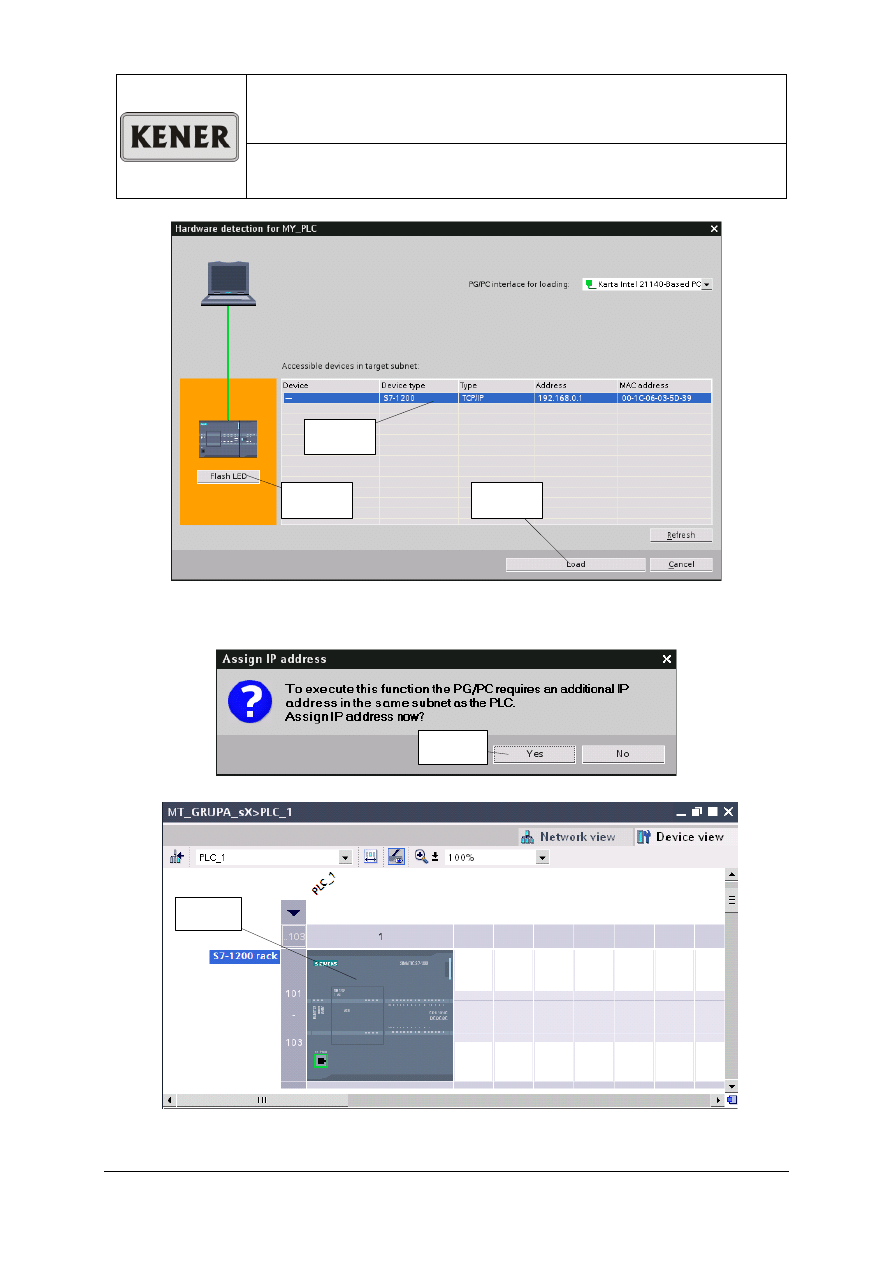
10. Automatycznie wykryj konfiguracje sprzętową „detect”
Katedra Energoelektroniki,
Napędu Elektrycznego i Robotyki
Laboratorium Sterowników Programowalnych SIMATIC
3
Gliwice 2011-03-14
11
12
13
11. Wybierz znaleziony sterownik PLC
12. Kliknij „Flash LED” – diody na sterowniku powinny mrugać
13. Wczytaj konfiguracje
14
14. Przypisz adres IP
15
15. Wczytana konfiguracja
Katedra Energoelektroniki,
Napędu Elektrycznego i Robotyki
Laboratorium Sterowników Programowalnych SIMATIC
4
Gliwice 2011-03-14
16
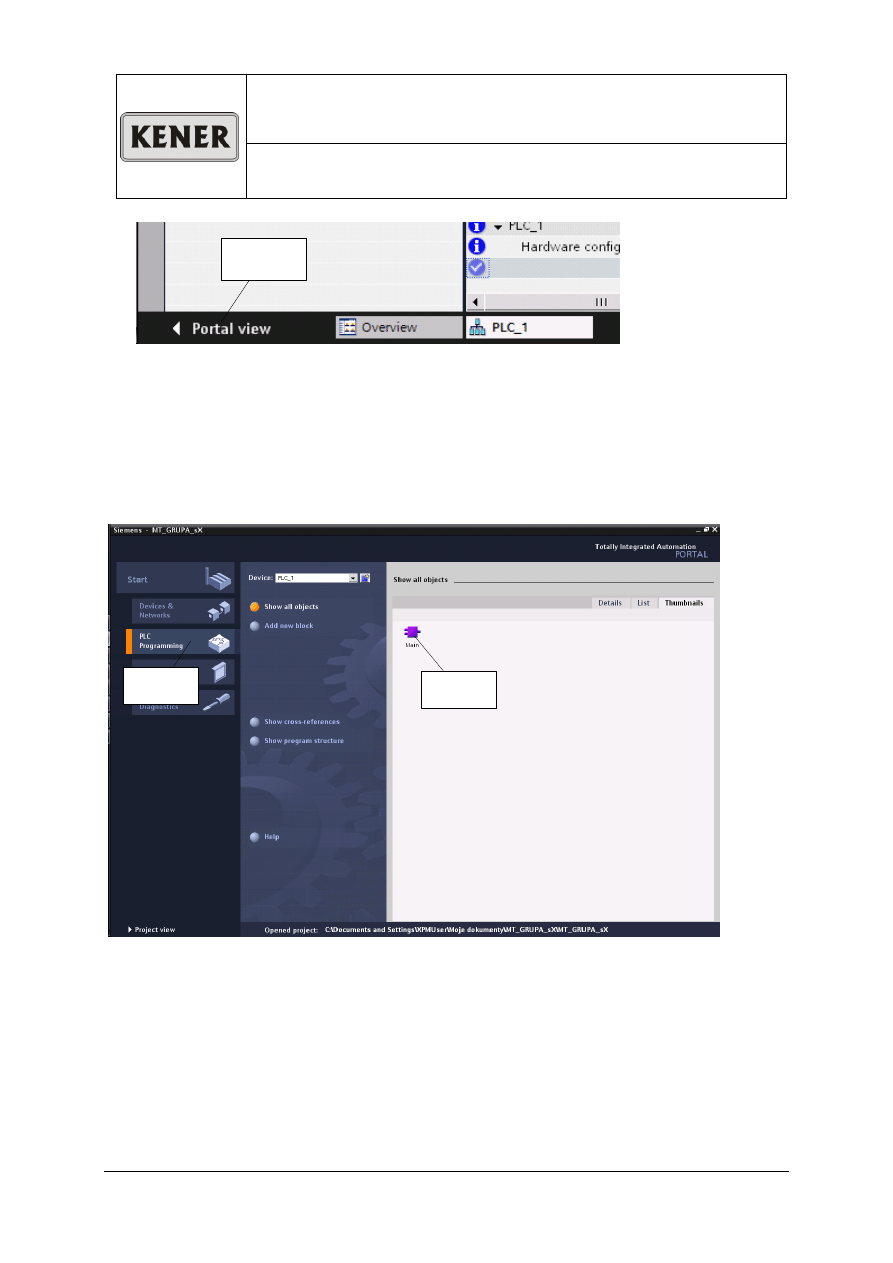
16. Wróć do głównego okna
2. Pierwszy program
1
2
1. Wybieramy „PLC Programming”
2. Klikamy 2x na Main
Katedra Energoelektroniki,
Napędu Elektrycznego i Robotyki
Laboratorium Sterowników Programowalnych SIMATIC
5
Gliwice 2011-03-14
3
4
5
6
7
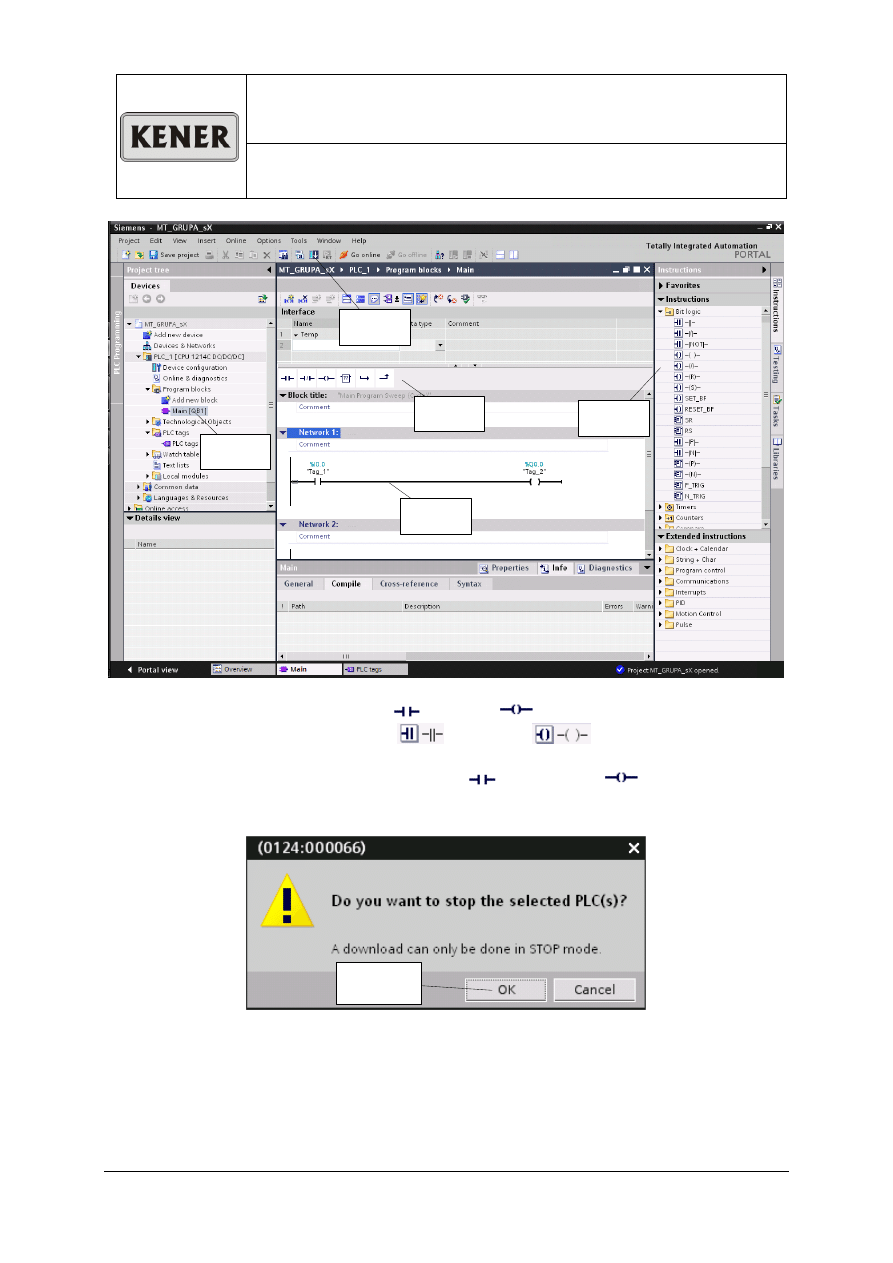
3. Z projektu wybieramy :Main [OB1]
4. Z podręcznej palety wybieramy
a nastęnie
5. Lub z „Instruction -> Bit Logic”
a następnie
6. Wybrane elementy z punktu 4 lub 5 przeciągamy do okna, tworząc schemat jak na
rysunku. Opisujemy odpowiednio wejście
I0.0 a wyjście
Q0.0
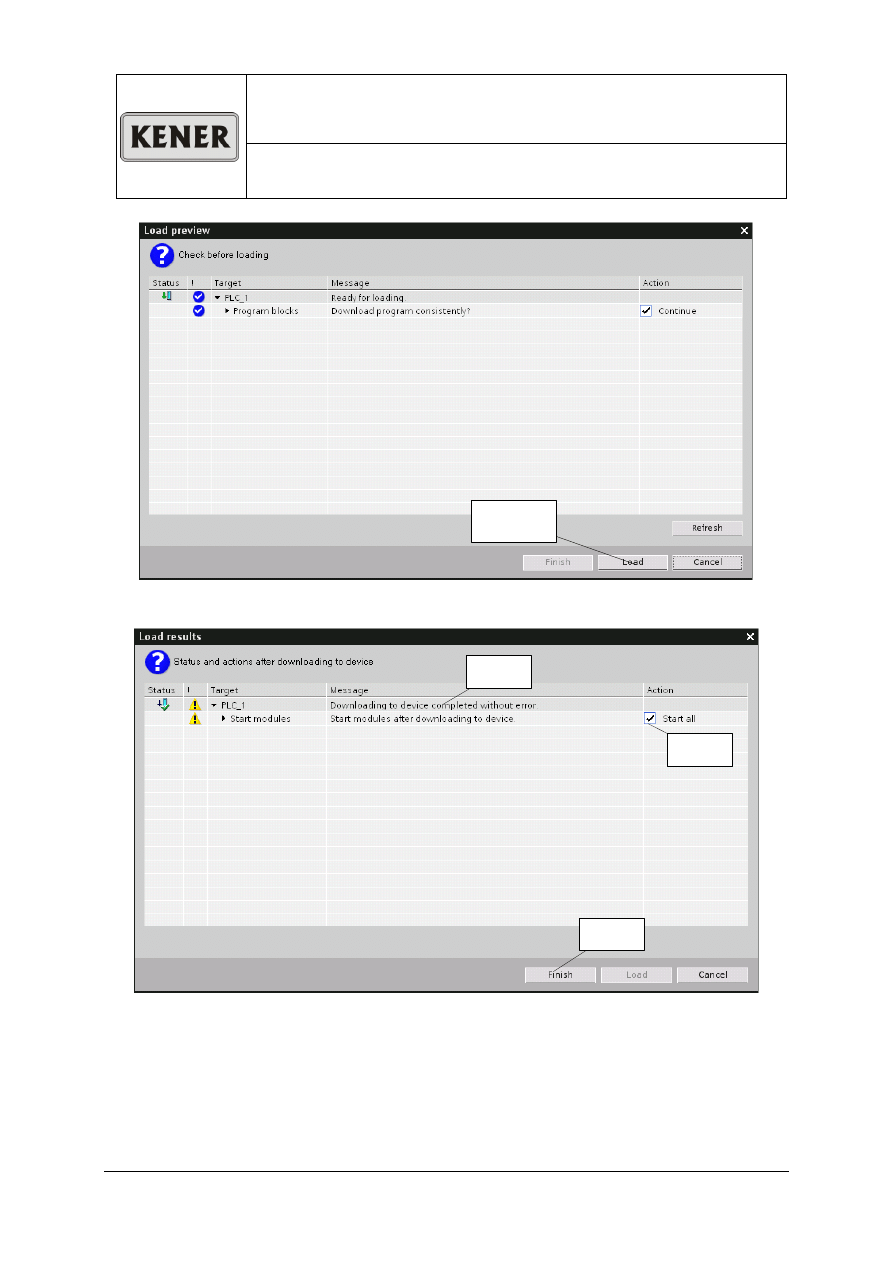
7. Wybieramy „Download to device”
8
8. Jeżeli sterownik był uruchomiony zatrzymujemy go
Katedra Energoelektroniki,
Napędu Elektrycznego i Robotyki
Laboratorium Sterowników Programowalnych SIMATIC
6
Gliwice 2011-03-14
9
9. Wgrywamy program do sterownika
10
11
12
10. Jeżeli nie wystąpiły błędy
11. Zaznaczmy „Start All”
12. Kończymy wgrywanie
Katedra Energoelektroniki,
Napędu Elektrycznego i Robotyki
Laboratorium Sterowników Programowalnych SIMATIC
7
Gliwice 2011-03-14
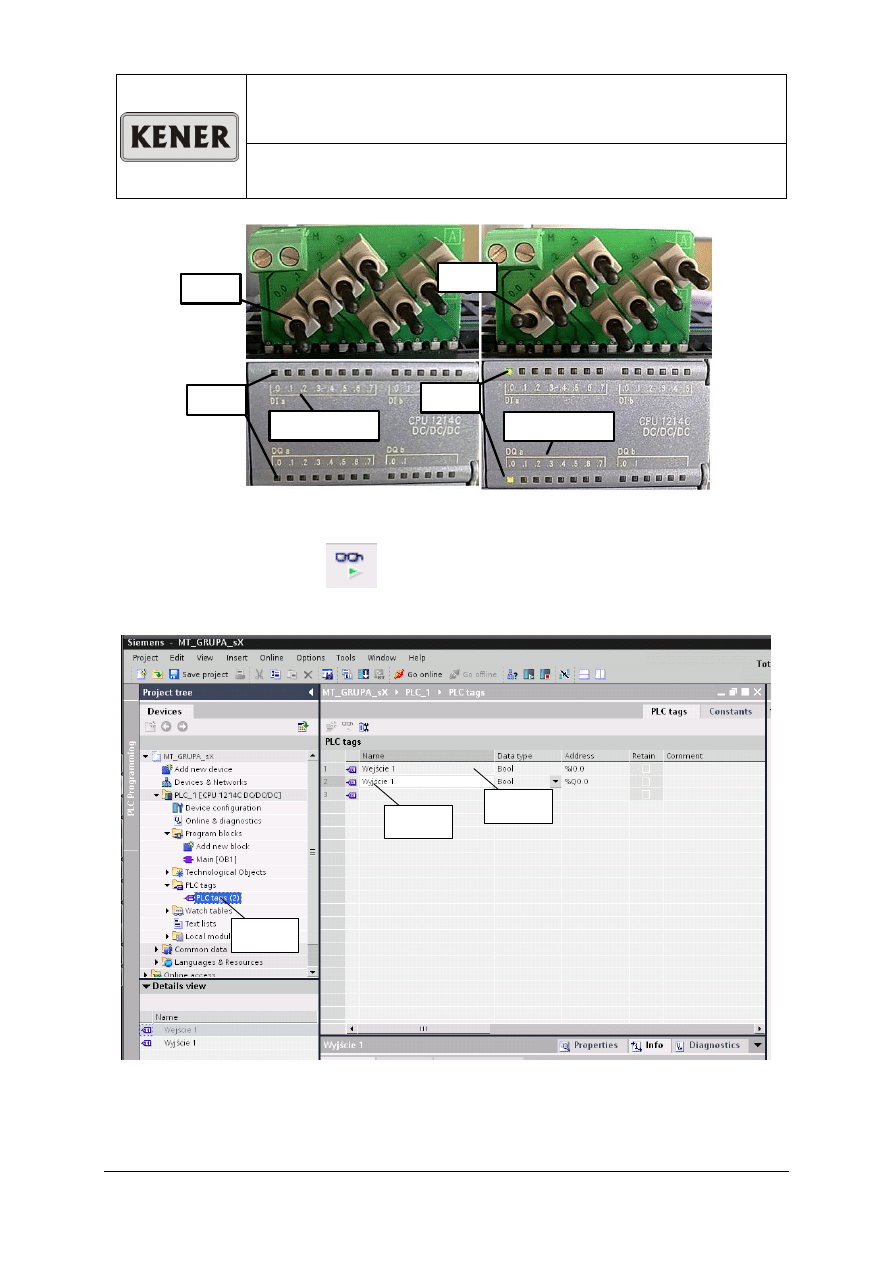
13
13
14
14
Wejścia
Wyjścia
13. Przełączenie wejścia I0.0
14. Powoduje aktywację wyjścia Q0.0
15. Naciskając na symbol
zaobserwować działanie programu po przełączeniu
wejścia I0.0.
16
17
18
16. Możliwe jest przypisanie nazw symbolicznych poszczególnym elementom programu
poprzez kliknięcie na „PLC tags”
17. Przypisując adresowi wejściowemu I0.0 „Wejście 1”
18. Oraz adresowi wyjściowemu Q0.0 „Wyjście 2”
Katedra Energoelektroniki,
Napędu Elektrycznego i Robotyki
Laboratorium Sterowników Programowalnych SIMATIC
8
Gliwice 2011-03-14
19
20
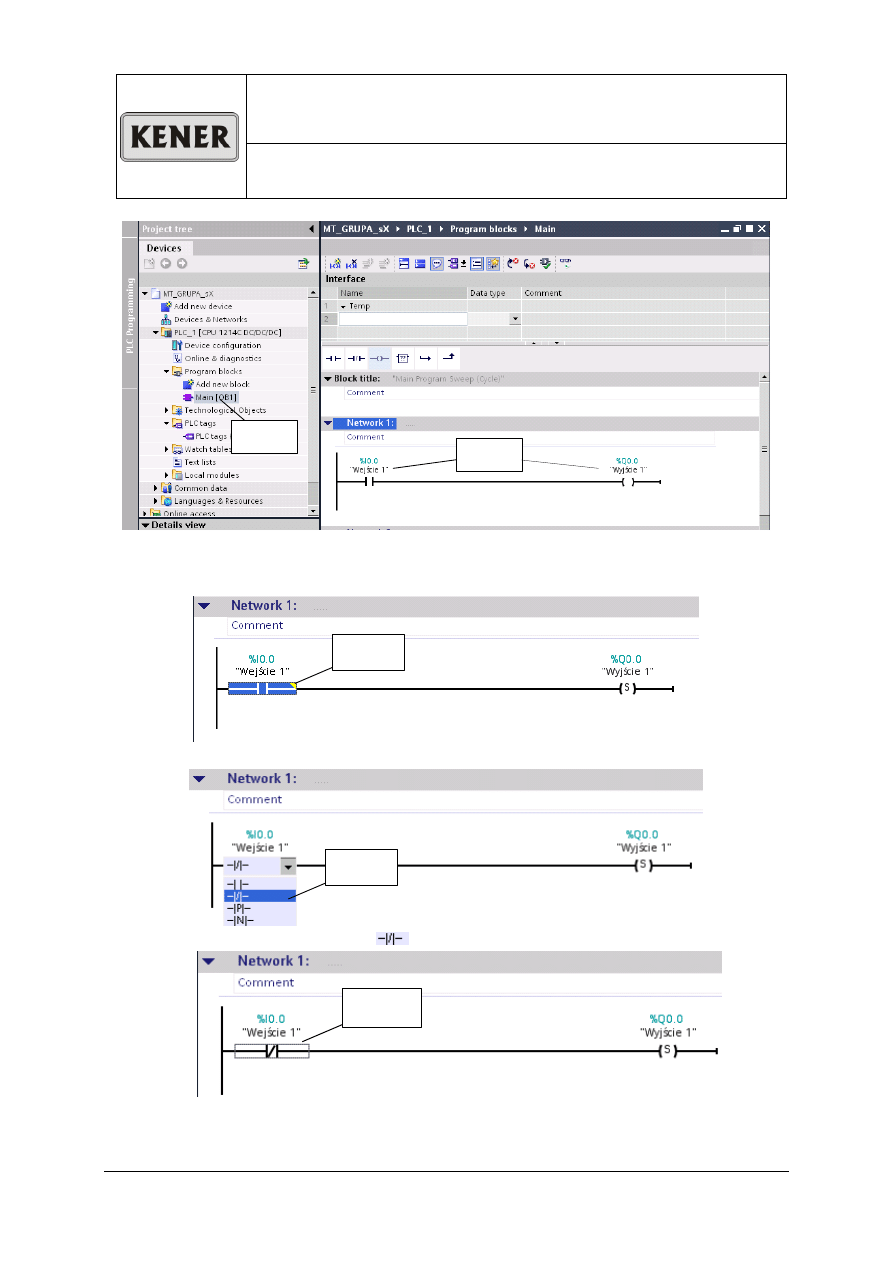
19. Wybieramy ponownie widok programu
20. Opis elementów zmienił się
21
21. Wybieramy element. Klikamy na żółty trójkąt w prawym górnym rogu elementu
22
22. Z rozwijanej listy wybieramy
23
23. Zmieniliśmy typ elementu
24. Powtarzając punkty od 7 do 13 obserwujemy zachowanie się wyjścia Q0.0
Katedra Energoelektroniki,
Napędu Elektrycznego i Robotyki
Laboratorium Sterowników Programowalnych SIMATIC
9
Gliwice 2011-03-14
3. Program
owanie sterowników PLC
Zadanie 1
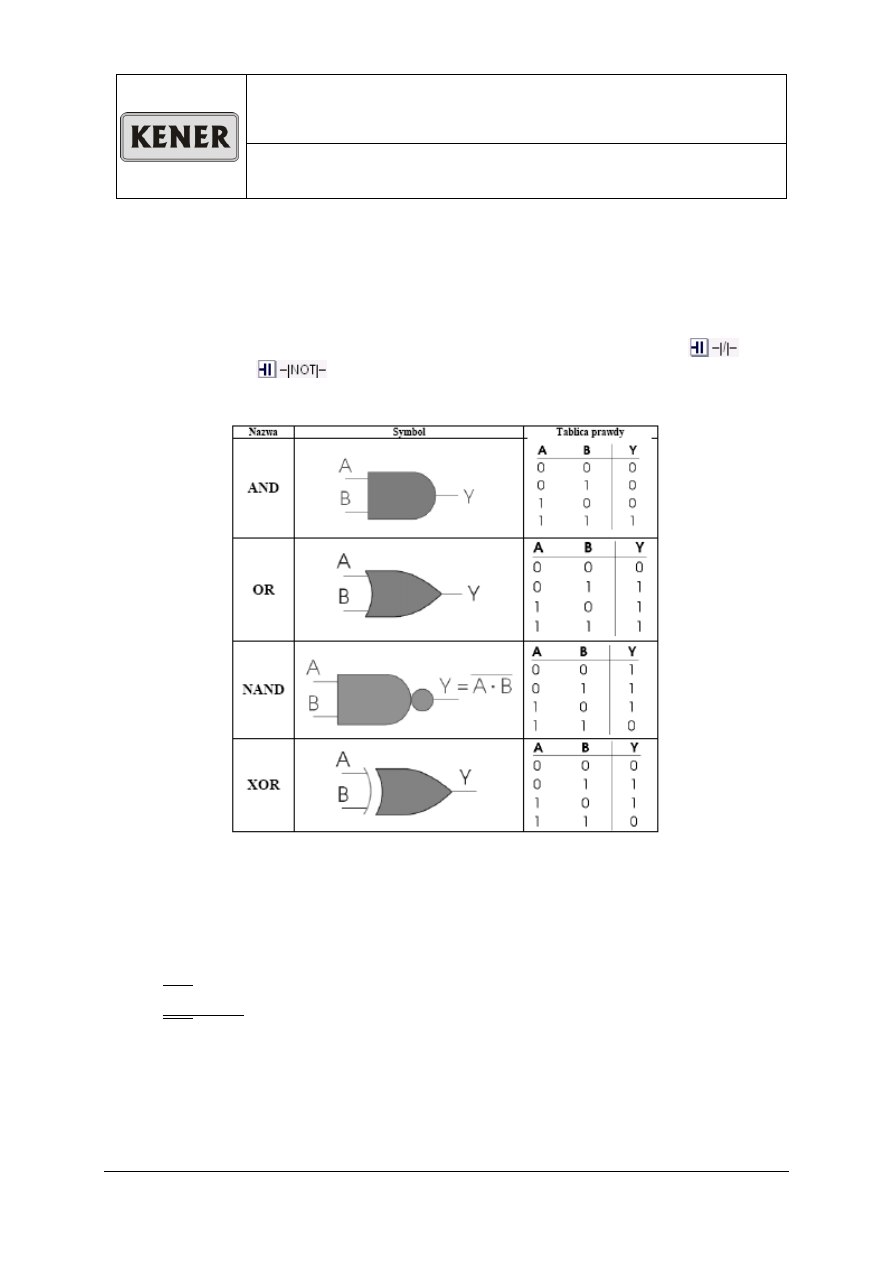
Znając tablicę prawdy poszczególnych elementów (Tabela 1) napisać funkcje, które w
zależności od stanu wejść A (I0.0) i B (I0.1) będą realizowały funkcje logiczne AND (Q0.0),
OR (Q0.1), NAND (Q0.2), XOR (Q0.3). Do negacji pojedynczego wejście użyć
. Do
negacji funkcji użyć
. Funkcje należy pisać w kolejnych networkach.
TABELA 1
Zadanie 2
Napisać program realizujący następujące funkcje logiczne:
4
.
0
3
.
0
0
.
0
3
.
0
5
.
0
4
.
0
3
.
0
2
.
0
3
.
0
1
.
0
0
.
0
1
.
0
4
.
0
2
.
0
0
.
0
0
.
0
I
I
I
Q
I
I
I
Q
I
I
I
Q
I
I
I
Q
Katedra Energoelektroniki,
Napędu Elektrycznego i Robotyki
Laboratorium Sterowników Programowalnych SIMATIC
10
Gliwice 2011-03-14
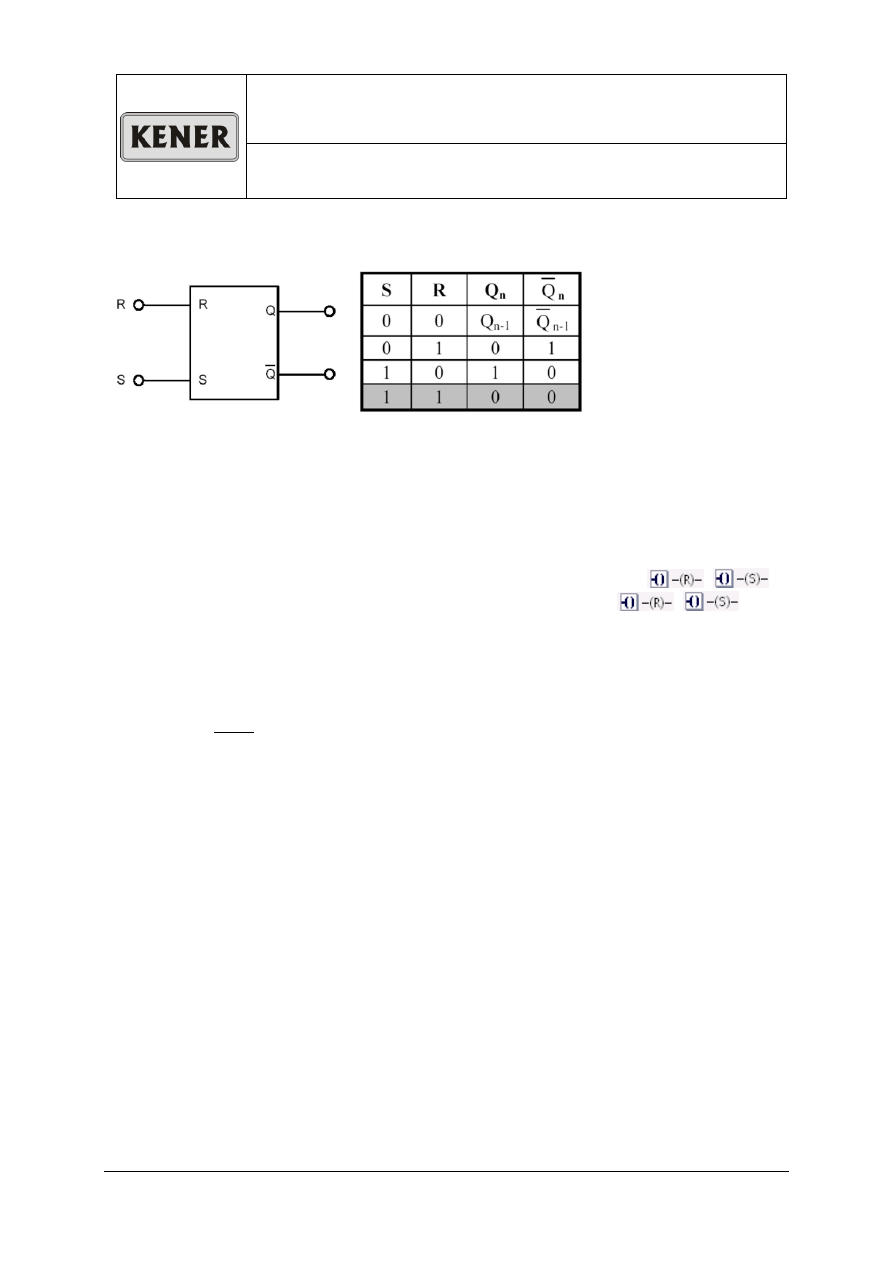
Zadanie 3
Na rysunku przedstawiona jest zasada działania przerzutnika RS. Napisać program realizujący
pamięć RS z priorytetem kasowania (technika stykowa)
Napisać program realizujący pamięć RS z priorytetem zapisu (technika stykowa)
Zadanie 4
Napisać program realizujący pamięć RS z priorytetem kasowania (wyjście
;
)
Napisać program realizujący pamięć RS z priorytetem zapisu (wyjście
;
)
Zadanie 5
Zmodyfikować program z zadania 4 zastępując wyjście Q0.0 znacznikiem M0.0. Znacznik
ten wykorzystać następnie do zrealizowania funkcji logicznej:
0
.
0
5
.
0
0
.
0
M
I
Q
Wyszukiwarka
Podobne podstrony:
Instrukcja PLC MT
PLC MT 2
MT st w 06
Metoda magnetyczna MT 14
Prezentacja PLC
W 5g PLC LICZNIKI
Sterowniki PLC
MT st w 02a
MT wyk1 (2)
63 MT 09 Przybornik narzedziowy
61 MT 03 Pila tarczowa
58 MT 10 Przystawka UKF
61 MT 02 Kolka profilowane
overview simatic controllers 04 2007 en plc
h1239g PLC PS4 416
więcej podobnych podstron