Charakterystyki mechaniczne maszyn napędzanych.
x
n
0
m
mn
0
m
m
n
n
)
M
M
(
M
M
−
+
=
W którym:
Mm0 – moment oporowy wywołany tarciem w częściach ruchomych,
Mmn – moment oporowy urządzenia przy prędkości znamionowej,
nn– prędkość znamionowa.
Wykładnik potęgowy X będzie miał zależnie od rodzaju urządzenia różne wartości. Należy zauważyć, że
równanie (2.2) jest słuszne tylko wówczas, gdy n≠0. Jeżeli prędkość jest równa zeru, będzie występował inny
moment oporowy niż Mm0, wywołany tarciem spoczynkowym. Moment ten w typowych łożyskach
maszynowych jest większy od momentu tarcia ruchowego.
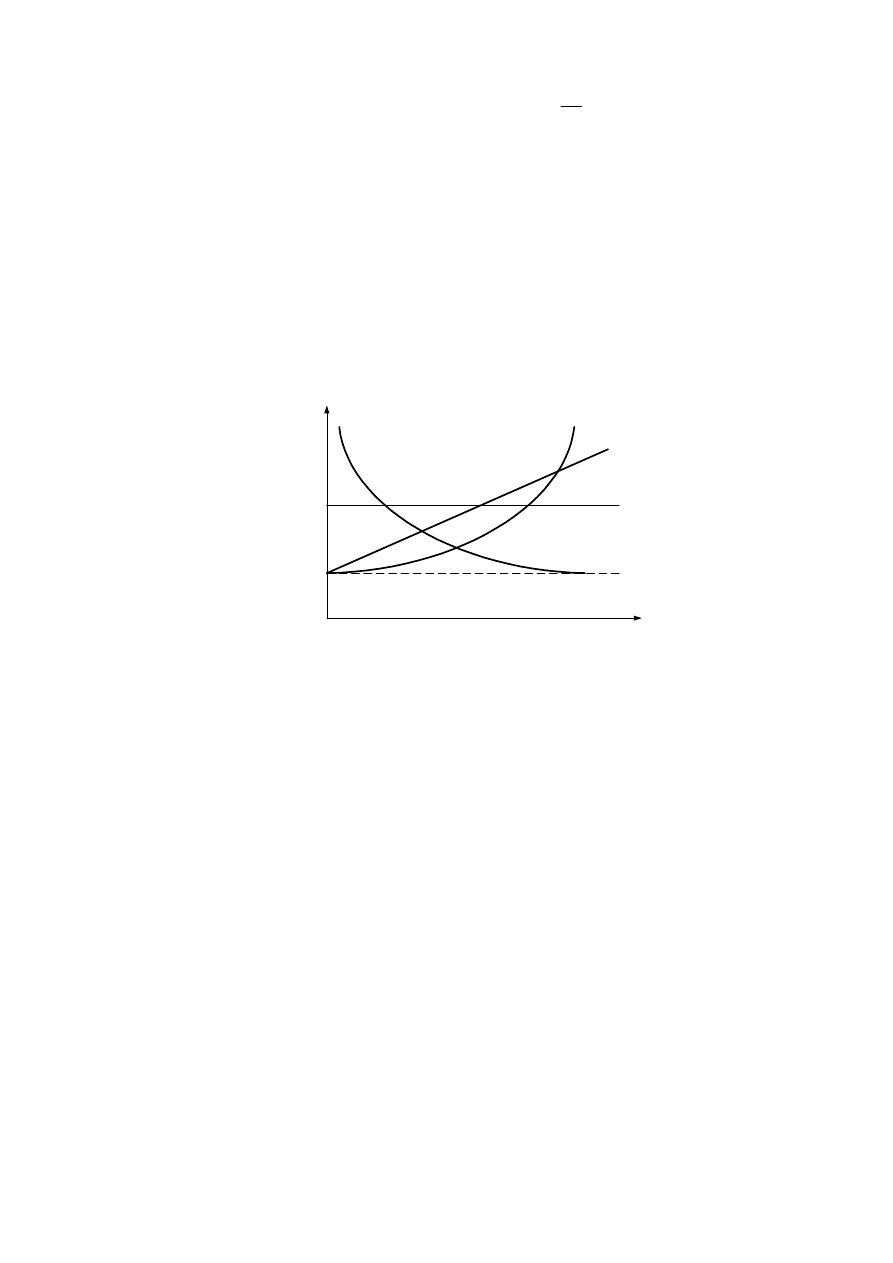
Można wyróżnić cztery grupy maszyn napędzanych, które opisane równaniem (2.2), różnić się będą
wykładnikiem potęgowym X.
Gdy X = 0, moment oporowy jest niezależny od prędkości wirowania (krzywa 1 na rys. 2.1). Do tej grupy
należą takie urządzenia mechaniczne jak suwnice, dźwigi, maszyny wyciągowe, obrabiarki, walcarki,
przenośniki taśmowe.
M
m
n
0
M
m0
2
1
3
4
Rys. 2.1. Charakterystyki mechaniczne typowych urządzeń mechanicznych
Gdy X = 1 moment oporowy zmienia się liniowo w funkcji prędkości (krzywa 2 na rys. 2.1). Taką
charakterystykę mechaniczną będzie miała obcowzbudna prądnica prądu stałego, obciążona stałą
rezystancją.
Gdy X=2 uzyskuje się charakterystykę mechaniczną w kształcie paraboli (krzywa 3 na rys.2.1).
Do tej grupy należą urządzenia oparte na zasadzie siły odśrodkowej, a mianowicie pompy odśrodkowe,
wentylatory, turbosprężarki, śruby okrętowe. Taką charakterystykę nazywamy w praktyce wentylatorową.
Gdy X=−1 uzyskuje się charakterystykę mechaniczną w kształcie hiperboli (krzywa 4 na rys.2.1). Tego typu
charakterystykę wykazują urządzenia do nawijania i rozwijania taśm i wstęg,
Wyszukiwarka
Podobne podstrony:
charakterystyki mechaniczne maszyn napedzajacych
charakterystyki mechaniczne przy zmianie rezystancji w obwodzie wirnika maszyny indukcyjnej
mechanik maszyn i urzadzen drogowych 833[01] z1 01 n
sprawko przekladnie Sprawozdanie z Teorii mechanizmów i maszyn
mechanik maszyn i urzadzen drogowych 833[01] z1 02 n
WP RADEK, 2 )Charakterystyki mechaniczne n = f ( I tw ) :
Charakterystyka mechaniki stawow i zestawienie czynnosciowe miesni
mechanik maszyn i urzadzen drogowych 833[01] o1 01 u
mechanik maszyn i urzadzen drogowych 833[01] z1 01 u
ALCAPi, Akademia Morska -materiały mechaniczne, Maszyny iużądzenia okrętowe, Wirówki dla studentów
dudziński,układy napędowe,Metody kształtowania przebiegu charakterystyk mechanicznych silnika indukc
mechanik maszyn i urzadzen drogowych 833[01] z2 01 u
mechanik maszyn i urzadzen drogowych 833[01] z2 02 u
mechanik maszyn i urzadzen drogowych 833[01] o1 04 u
więcej podobnych podstron