
2. Słowo wstępne - ROBOTYKA W XXI WIEKU
Można śmiało zacząć od słów Już starożytni ... . Istotnie, właśnie w już starożytności
skonstruowano aniołka podającego ręcznik królowi po kąpieli. Wprawdzie nie był to robot w
sensie obecnej definicji, ale można uznać tę konstrukcję za protoplastę obecnych robotów.
Termin robot pochodzący od słowa czeskiego robota, oznaczającego niewolniczą,
pańszczyźnianą pracę, po raz pierwszy został użyty przez czeskiego pisarza Karola Čapka w
fantastycznym dramacie RUR-Robot Uniwersalny Rossuma wydanym w 1920 roku. Utwór
zyskał dużą popularność i pojęcie robot weszło do niemal wszystkich języków europejskich.
Pierwotnie oznaczało sztucznego człowieka.
,,... produkować sztucznych robotników to przecież to samo co wyrabiać silniki
spalinowe. Produkcja musi być jak najprostsza, a produkt jak najlepszy, jak
najpraktyczniejszy...jaki robotnik jest dla fabryki najlepszy?... Taki, który jest najtańszy.
Który ma jak najmniej potrzeb. Młody Rossum skonstruował robotnika mającego
minimum potrzeb. Musiał go uprościć. Odrzucił wszystko, co bezpośrednio nie wiąże
się z wykonywaniem pracy. W ten właśnie sposób zlikwidował człowieka i stworzył
Robota..."
Kareł Čapek: "R.U.R. — Rossum's Universal Robots"— w przesadzie Andrzeja
Sieczkowskiego
Dopiero w połowie lat sześćdziesiątych słowo robot uzupełniono przymiotnikiem,
tworząc nowe pojęcie robot przemysłowy. W tym znaczeniu ta konstrukcja nie jest kopią
człowieka, a jedynie ma za zadanie wyręczać człowieka w wykonywaniu licznych prac,
zwłaszcza monotonnych oraz uciążliwych, związanych z procesem produkcyjnym. Tak
narodziła się robotyka i od czasu jej powstania budzi zrozumiałe zainteresowanie. Dotyczy to
również Polski, chociaż trudno uznać, że jest to kraj w tym względzie przodujący.
Stosunkowo późno, wprowadzono u nas nauczanie robotyki, bowiem kierunek studiów
Automatyka i Robotyka został powołany dopiero w 1987 roku. W zakresie robotyki studenci
Wydziału Elektrotechniki i Automatyki Politechniki Gdańskiej uczestniczą obowiązkowo w
przedmiocie Podstawy Robotyki, który jest w całości prowadzony przez Katedrę Automatyki.
Studenci mogą również wybierać dodatkowe przedmioty z tego kierunku studiów,
prowadzone przez inne Katedry Politechniki Gdańskiej. W nowym programie studiów udział
robotyki znacznie zwiększono, podwójnie rozszerzając czas przeznaczony na Podstawy
Robotyki oraz wprowadzono nowy przedmiot Mechatronika powstały na bazie przedmiotu
Urządzenia Automatyki i Robotyki.
Program wykładów przedmiotu Podstawy Robotyki obejmuje mechanikę i
projektowanie robotów, sterowanie robotów, sensorykę i elementy inteligencji maszynowej
oraz robotykę przemysłową i ze wzglądu na brak aktualnie przedmiotu Roboty Przemysłowe,
program Podstaw Robotyki częściowo zawiera elementy tego pierwszego.
Laboratorium z Podstaw Robotyki jest prowadzone dla studentów odbywających studia
na kierunku Automatyka i Robotyka zarówno na Wydziale Elektrotechniki i Automatyki jak i
na Wydziale Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej. Ćwiczenia są
prowadzone według skryptu Politechniki Gdańskiej współautorstwa: Ryszarda Arendta,
Andrzeja Grono, Pawła Kubiaka, Artura Opalińskiego i Piotr Orzechowskiego pt.:
„Laboratorium podstaw robotyki”, wydanego pod redakcją Andrzeja Grono.
7

Laboratorium Podstaw Robotyki jest wyposażone w dwa roboty przemysłowo-
edukacyjne typ L2, produkcji OBRUSN Toruń z komputerami sterującymi. Na tych
stanowiskach są prowadzone ćwiczenia związane z budową sterowanie i badaniem robotów.
We własnym zakresie opracowano doskonalsze programy sterowania robotów L2. Pozostałe
ćwiczenia odbywają się na stanowiskach komputerowych. Do symulacji kinematyki
manipulatora robota przemysłowego oraz do symulacji zrobotyzowanego stanowiska
montażowego zakupiono w Anglii program WORKSPACE 2.0. Badania symulacyjne układu
sterowania manipulatorem są prowadzone z zastosowaniem oprogramowania otrzymanego z
Politechniki Warszawskiej. Dotychczasowe wyposażenie laboratorium uzupełniono o
stanowisko sterowanej numerycznie wiertarki do obwodów drukowanych, na którym są
prowadzone 3 ćwiczenia. Do pozostałych, nowych ćwiczeń planuje się zakupienie stanowisk
komputerowych.
W nowym programie przedmiotu Podstawy Robotyki przewidziano również
seminarium. Polega ono na prezentacji, analizie i dyskusji dotyczącej najnowszych osiągnięć
w robotyce, na podstawie dostępnej literatury. Tematy są opracowywane i referowane przez
studentów. Szczegółowy dobór tematyki seminarium jest zależny od uzdolnień i
zainteresowań grupy studenckiej.
Wprowadzony w nowym programie studiów przedmiot Mechatronika stanowi
uzupełnienie praktycznej wiedzy z tej dziedziny.
Należy mieć świadomość, że obecny student - to inżynier działający głęboko w XXI
wieku. Jak wówczas będzie wyglądała robotyka? Uważa się, że obecna doba należy do
komputerów, a już za kilka lat człowiekowi trudno będzie obejść się bez robotów. Na rynku
pojawiają się roboty coraz sprawniejsze i coraz tańsze. Naukowcy i konstruktorzy uważają, że
wkrótce nasili się w społeczeństwach zapotrzebowanie, a zarazem i popyt na roboty przede
wszystkim ułatwiające codzienną pracę, np. automatyczne odkurzacze czy rozmaite zabawki
dotrzymujące dzieciom towarzystwa. W 2010 roku można spodziewać pierwszych
wielofunkcyjnych robotów, ale wykonujących takie czynności, na jakie zostały
zaprogramowane. Prognozuje się, że dziesięć lat później pojawią się roboty inteligentne - z
możliwością uczenia się nowych zadań. Oczywiście te prognozy są oparte na dzisiejszym
stanie wiedzy i obecnych możliwościach technicznych.
Inżynierowie europejscy i amerykańscy zrezygnowali już z prób skonstruowania robota
androidalnego, czyli podobnego do człowieka. Ich celem jest zbudowanie maszyn służących
ludziom. Jedynie Japończycy nie zaniechali starań i nadal trudzą się, by ich roboty wyglądały
jak ludzie. Fumio Hara z Science University w Tokio skonstruował już nawet głowę robota do
złudzenia przypominającą twarz znanej w Japonii prezenterki telewizyjnej. Ta mechaniczna
głowa za pomocą zainstalowanych w niej kamer potrafi śledzić „wzrokiem” ludzi i
naśladować ich mimikę.
Także producent samochodów Honda pracuje nad robotem androidalnym. Udało mu się
już skonstruować prototyp. Jest to mechaniczny 160-centymetrowy ludzik o roboczej nazwie
P3. Potrafi się z wdziękiem poruszać, nawet wchodzić po schodach i otwierać drzwi. Bez
trudu osiąga prędkość 2 km/godz., jednak już po 25 minutach musi udać się do stacji
ładowania akumulatorów. Ten model ma już następcę. Są też tacy, którzy twierdzą, że na tym
właśnie polega wyższość robota nad człowiekiem. Maszynie, nawet człekopodobnej, można
doładować lub wymienić akumulatory. A jednak życie robota zależy od człowieka. Paradoks
cywilizacji czy też świadoma ostrożność homo sapiens? Każdy ruch robota jest
zaprogramowany i sterowany na odległość przez człowieka. Nigdy ten mechaniczny człowiek
nie osiągnie doskonałości istoty ludzkiej.
Powodem, dla którego Japończycy z takim samozaparciem dążą do skonstruowania
robota-człowieka lub choćby maszyny przyjaznej człowiekowi, jest szybkie starzenie się
8

społeczeństwa japońskiego. Coraz więcej seniorów wymaga opieki i pomocy, a nie może im
tego zapewnić zbyt mała liczba młodych opiekunów. Konstruktorzy dążą, by tę rolę przejęły
odpowiednio zaprogramowane roboty i starają się stworzyć namiastkę człowieka - istotę
przyjazną człowiekowi, dobrą i chętną do niesienia pomocy.
A jeśli ktoś potrafi kiedyś taką maszynę uduchowić, może wtedy okaże się, że wysiłek,
aby kultywować ponadczasowe powszechnie uznawane wartości, nie poszedł na marne
. Jest tylko jeden warunek. Trzeba pamiętać, że roboty powstają dla człowieka, a nie przeciw
niemu. Hi. :-).
9

3. Rys historyczny rozwoju robotyki i sytuacja obecna
3.1. Rys historyczny rozwoju robotyki
Pierwsze automaty pojawiły się już w czasach starożytnych. Archytas z Tarentu,
przyjaciel Platona, 400 lat p.n.e. wynalazł kilka ciekawych zabawek mechanicznych, np.
takich jak fruwające ptaki. Wykonał drewnianego gołębia, który według przekazów
historycznych mógł latać.
W średniowieczu konstruowano tzw. androidy, tj. ruchome figury o wyglądzie
człowieka, wykonujące określone czynności, np. zamykanie i otwieranie drzwi, witanie
wchodzących. W średniowieczu, odrodzeniu i czasach poprzedzających rewolucję
przemysłową powstało wiele różnych mechanizmów, wykonujących określone czynności.
Mimo że nie była wtedy znana elektryczność, zbudowano wiele przedziwnych modeli
poruszanych energią wody, siłą ciężkości, energią zmagazynowaną w sprężynach. W tym
okresie budowano przepiękne zegary z poruszającymi się figurkami ludzi i zwierząt. Za
najbardziej skomplikowany uważa się automat wykonany w 1774 roku przez Jaqueta Drosa,
w postaci dziewczynki grającej na klawikordzie. Lalka ta poruszając ramionami, wybierała
palcami właściwe klawisze i grała melodię przez pięć minut. Androidy zbudowane przez
Jaqueta Drosa można zobaczyć w muzeum w Neuchatel (Szwajcaria). Cechą wspólną tych
mechanizmów była próba naśladowania ruchu żywych organizmów, przede wszystkim
człowieka i zwierząt.
Słowo robot po raz pierwszy pojawiło się w 1920 roku, kiedy to czeski pisarz Karel
Ćapek napisał dramat fantastyczno-naukowy „R.U.R. - Robot Uniwersalny Rossuma”. Pisarz
nazwał robotami sztuczne istoty - maszyny, będące imitacją człowieka i odznaczające się
dużym zdyscyplinowaniem i wydajnością pracy, o pewnych własnościach inteligencji, zdolne
do podejmowania decyzji i wykonywania prac, ale wolne od wszelkich uczuć.
Nazwa wprowadzona w literaturze rozpowszechniła się praktycznie we wszystkich
krajach uprzemysłowionych i obecnie przyjęto nazywać robotami automatyczne maszyny,
które wykonują czynności charakterystyczne dla człowieka.
3.2. Rozwój robotyki przemysłowej
Międzynarodowa Federacja Robotyki (IFR) wspólnie 7. Europejską Komisją
Ekonomiczną sporządza coroczne raporty zawierające dane statystyczne o rozwoju robotyki w
uprzemysłowionych krajach świata. Tu podaje się kilka wybranych zestawień ukazujących
stan obecny i historię rozwoju robotyki przemysłowej. Liczbę zainstalowanych robotów w
przemyśle w wybranych krajach w latach 1984-2002 podano w tablicy .1. Tablicę
sporządzono na podstawie statystyki prowadzonej przez Międzynarodową Federację Robotyki
(IFR) i wcześniejsze raporty.
Z tablicy 1 wynika, że w końcu 2002 roku w eksploatacji było ok. 770 tys. robotów
przemysłowych oraz że zdecydowanie najwięcej robotów jest zainstalowanych w Japonii
(ponad 40% wszystkich robotów na świecie), następnie w USA, w Niemczech i we Włoszech.
Liczby robotów zainstalowanych pod koniec 1999 roku w różnych częściach świata
pokazano na rys. 1. Na rys. 2 pokazano procentowy udział robotów zainstalowanych w
przemyśle w krajach Unii Europejskiej. Liczby robotów instalowanych rocznie w latach 1993-
2002 pokazano na rys. 3.
10
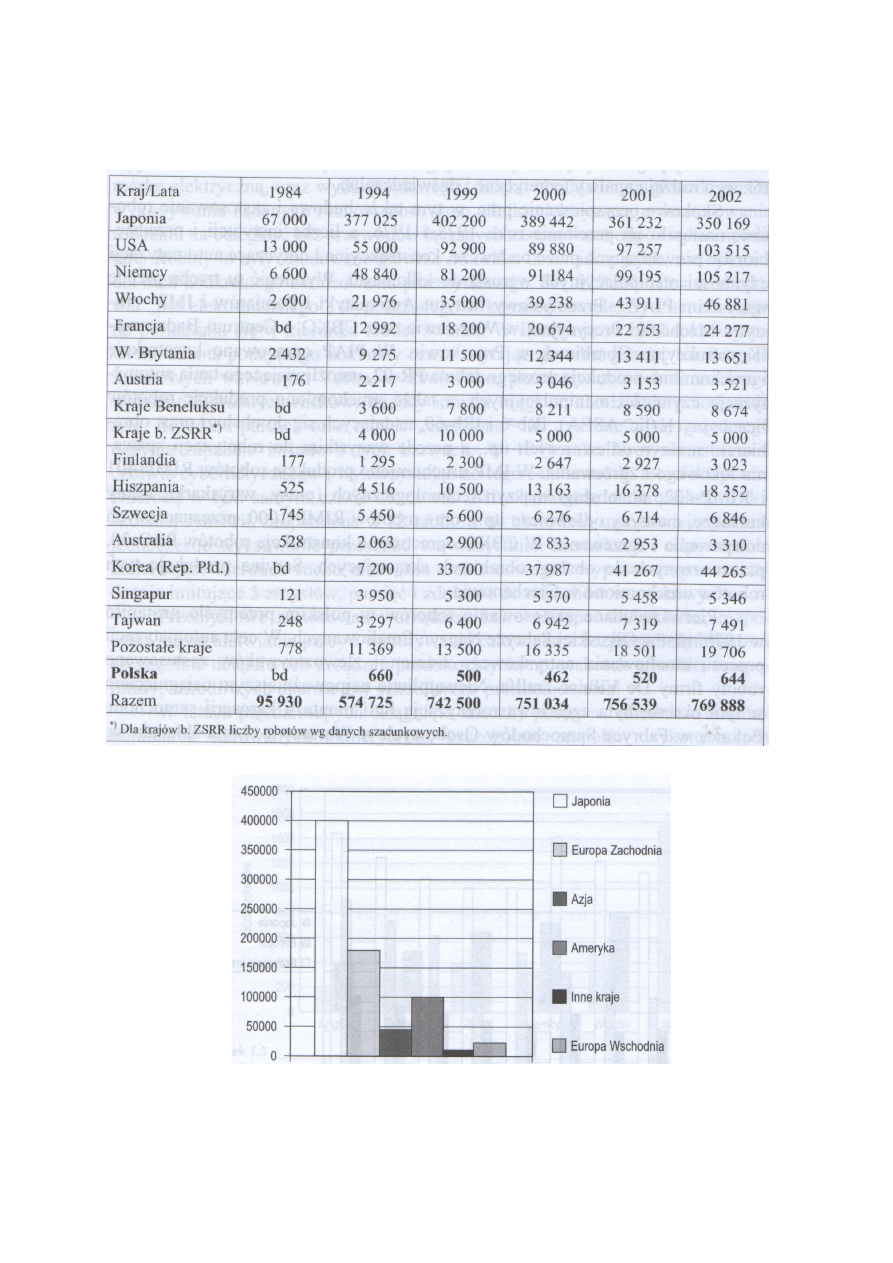
Tablica 1.
Liczba zainstalowanych robotów w przemyśle w wybranych krajach w latach 1984-2002
Rys. 1. Liczba robotów zainstalowanych pod koniec 1999 roku w różnych częściach świata
11
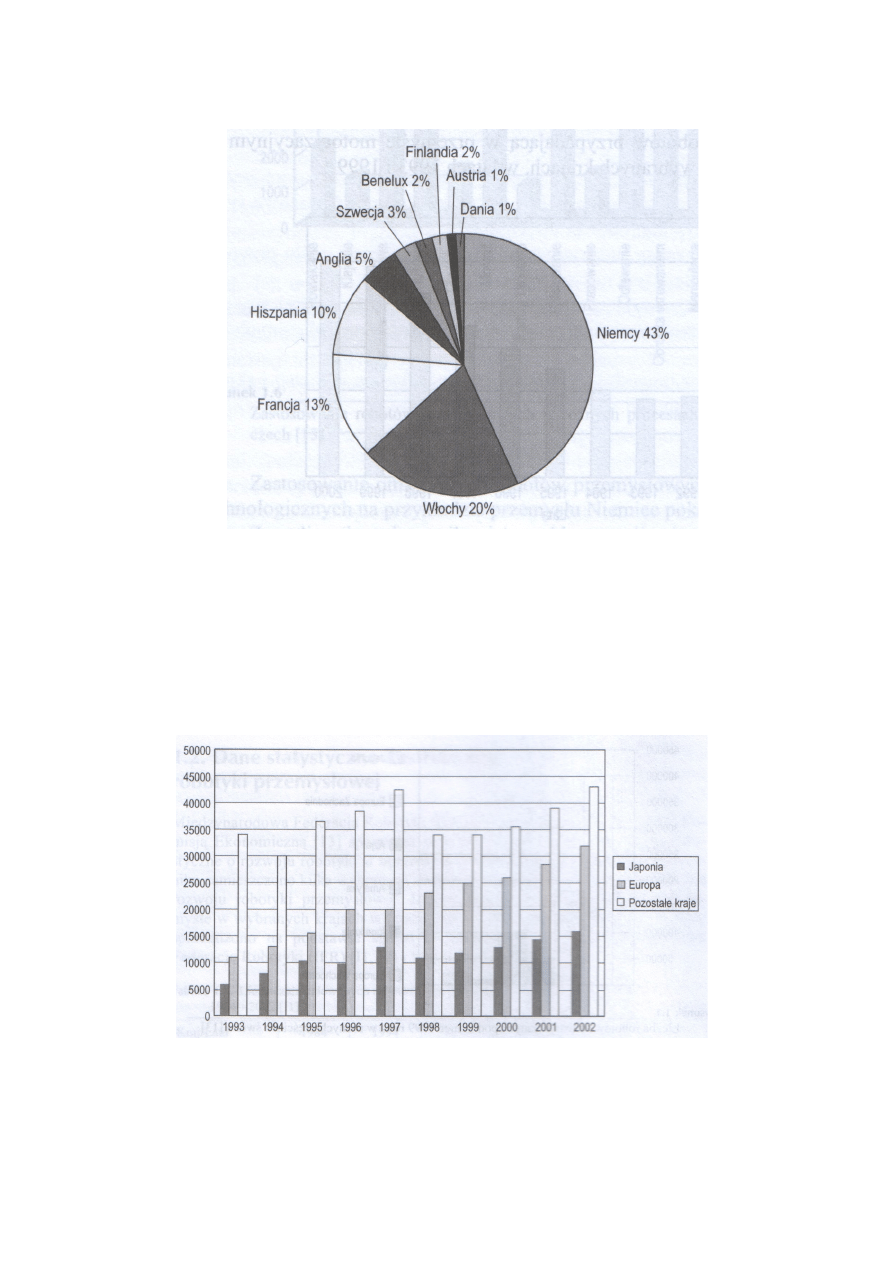
Rys. 2.
Procentowy
udział
robotów
zainstalowanych w przemyśle krajów Unii Europejskiej
Zwiększaniu sprzedaży robotów towarzyszy znaczący wzrost nakładów finansowych
przeznaczonych na robotyzację i automatyzację, co pokazano na przykładzie Niemiec w
latach 1990-2000 - rys. 4 oraz coraz większy ich udział w wykonywaniu operacji
technologicznych w przemyśle. Na rys. 5 przedstawiono liczbę robotów przypadającą w
przemyśle motoryzacyjnym na 10000 pracowników w wybranych krajach, w latach 1993 i
1999.
Rys. 3. Liczby robolów instalowanych rocznie w latach 1993-2002
12
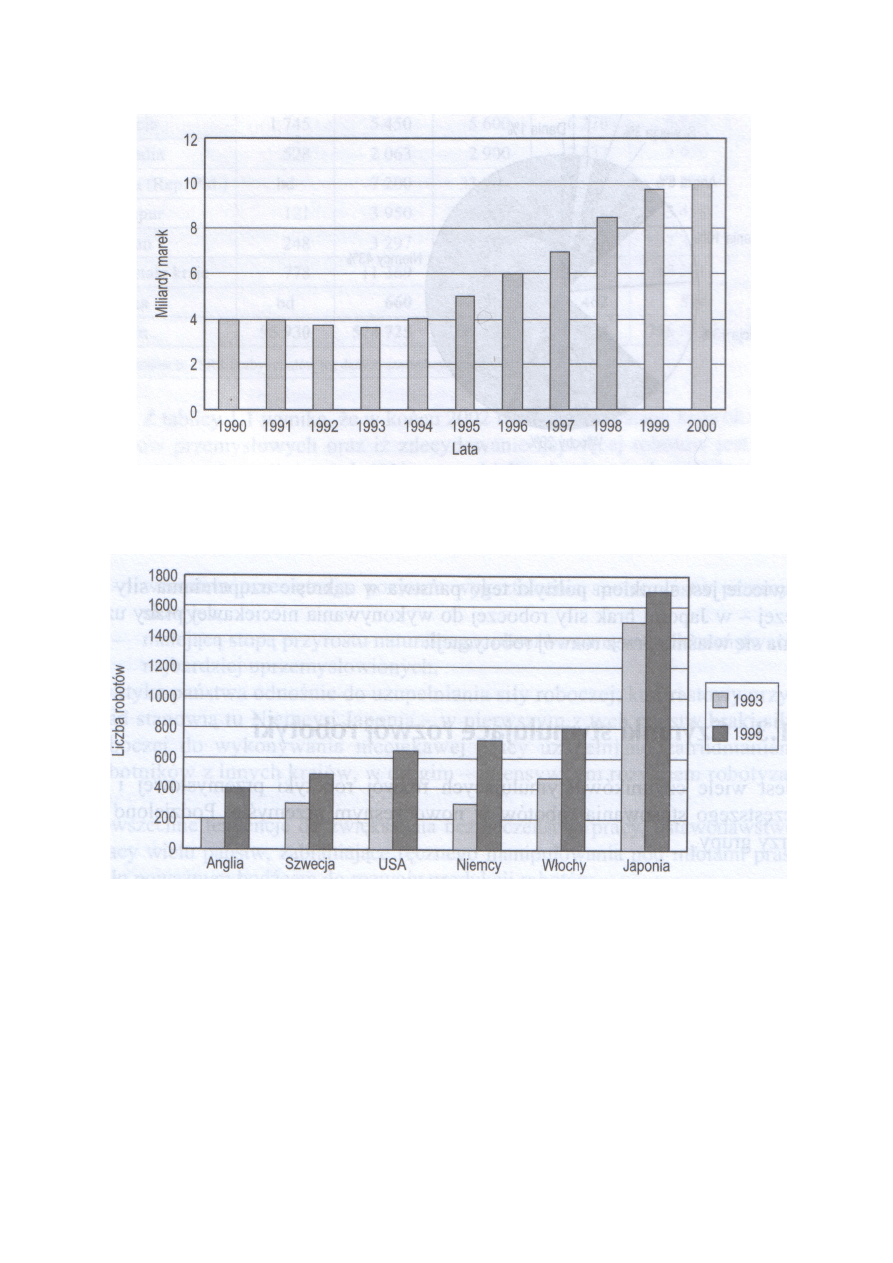
Rys. 4. Nakłady na robotykę i automatykę w Niemczech
Rys. 5. Liczba robotów w przemyśle motoryzacyjnym przypadająca na 10.000
pracowników
Zastosowanie omawianych robotów przemysłowych w różnych procesach
technologicznych na przykładzie przemysłu Niemiec pokazano na rys. 6.
13
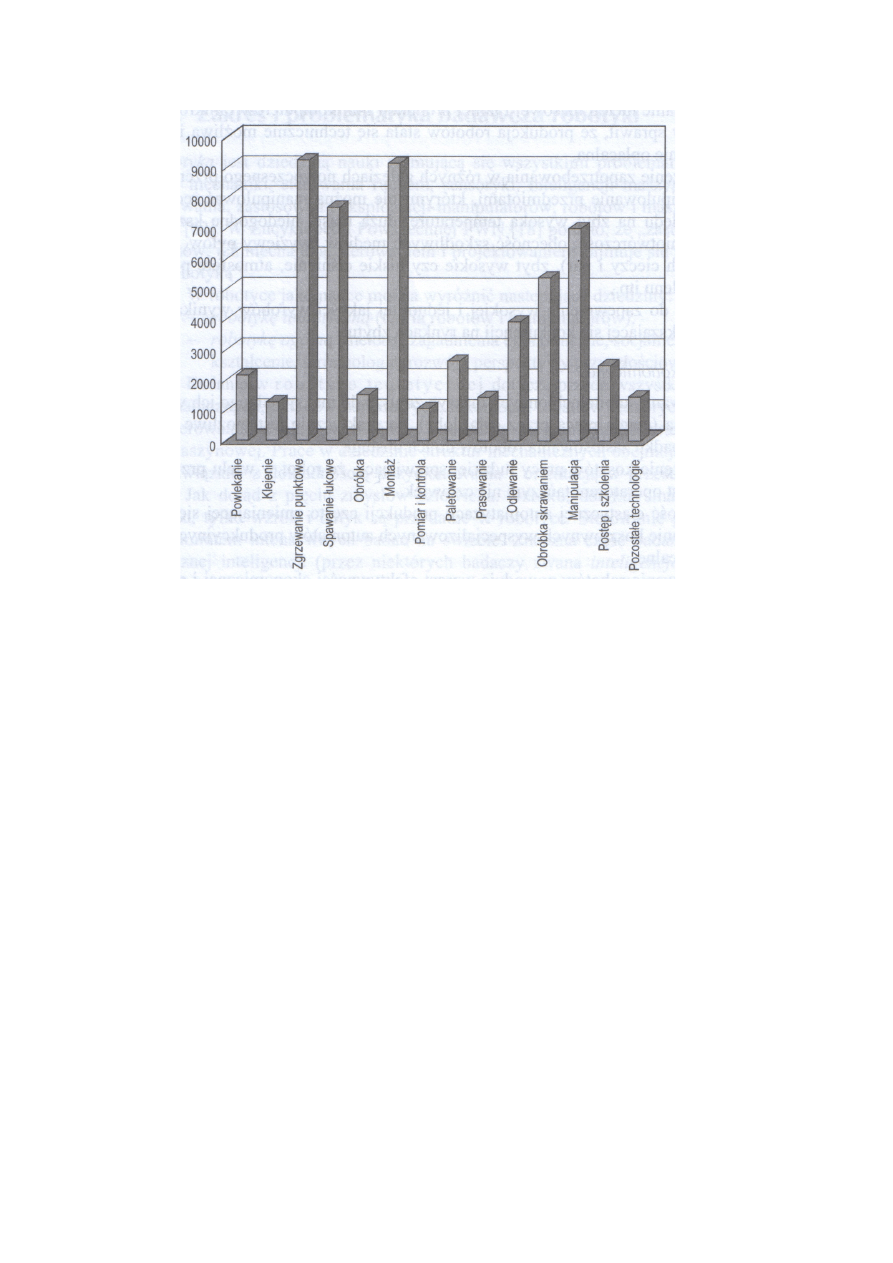
Rys. 6.
Zastosowanie robotów przemysłowych w różnych procesach technologicznych w Niemczech
Z analizy danych wynika, jak szybko rozwija się rynek robotów przemysłowych.
Niezwykle znaczący udział Japonii w robotyzacji przemysłu na całym świecie jest skutkiem
polityki tego państwa w zakresie uzupełniania siły roboczej - w Japonii brak siły roboczej do
wykonywania nieciekawej pracy uzupełnia się właściwie przez rozwój robotyzacji.
14

4. Zakres i problematyka badawcza robotyki
Robotyka zajmuje się problemami dotyczącymi mechaniki, sterowania ruchem,
sensoryki, inteligencji maszynowej, projektowania, zastosowań i eksploatacji manipulatorów,
robotów i maszyn kroczących. W Encyklopedii Powszechnej PWN podano, że
„zastosowaniem robotów, ich mechaniką, sterowaniem i projektowaniem zajmuje się nauka
zwana robotyką”.
W robotyce jako nauce można wyróżnić następujące działy:
•
robotykę teoretyczną (teoria robotów i manipulatorów),
•
robotykę ogólną (metody, zagadnienia ekonomiczne, socjalne, społeczne, kształcenie,
terminologia, rozwój i perspektywy przyszłościowe).
Badania w robotyce teoretycznej dotyczą przede wszystkim struktur mechanicznych,
układów napędowych, lokomocji, układów sensorycznych, teorii sterowania, a także
sterowników i układów programujących oraz inteligencji maszynowej. Prace w dziedzinie
struktur mechanicznych obejmują zagadnienia związane z dokładnością pozycjonowania i
orientacją w przestrzeni roboczej. Jak dotąd z pięciu zmysłów człowieka: wzroku, dotyku,
smaku, słuchu, węchu, tylko wzrok i dotyk są przydatne w robotyce. Sterowanie głosem jest
przedmiotem intensywnych badań na świecie. Znaczna część badań z zakresu sztucznej
inteligencji (przez niektórych badaczy zwana inteligencją maszynową) dotyczy wspomagania
użytkownika w procesie informacyjnym wykonywanego zadania.
Robotyka ogólna zajmuje się zagadnieniami ekonomicznymi, socjalnymi. społecznymi,
kształcenia, ochrony i bezpieczeństwa pracy. Ważnym działem są tutaj prace z zakresu
standaryzacji terminologii i oznaczeń. Jest to stosunkowo słabo rozwinięty dział robotyki i jak
dotąd brak jest pewnych i w pełni obiektywnych metod oceny skutków ekonomicznych,
socjalnych i społecznych robotyzacji.
Według kryterium zastosowań robotów można natomiast wyróżnić następujące działy
robotyki:
•
robotyka przemysłowa (zastosowanie robotów i manipulatorów w przemyśle
elektromaszynowym, spożywczym, papierniczym, szklarskim, w chemii, energetyce,
górnictwie i innych działach gospodarki),
•
robotyka maszyn kroczących (jedno-, dwu-, cztero-, sześcio-, wielonożnych,
mieszanych kołowo-nożnych, do realizacji funkcji chodu, biegu, skoku, pełzania),
•
robotyka medyczna i rehabilitacyjna (manipulatory i roboty do chirurgii, terapii,
protetyki, rehabilitacji),
•
robotyka dziedzinowa (zastosowanie robotów w innych dziedzinach: do prac
podwodnych, w przestrzeni kosmicznej, na innych planetach, do prac naukowych, do
celów wojskowych, inspekcyjnych, walki z pożarami, katastrofami, w budownictwie,
ro
l
nictwi
e
, transporcie, usługach, administracji).
Przedmiotem zainteresowania robotyki przemysłowej jest zespół zagadnień związanych
z zastosowaniem robotów i manipulatorów przemysłowych do celów robotyzacji takich
podstawowych procesów produkcyjnych, jak odlewnictwo, spawalnictwo, malarstwo,
lakiernictwo, montaż, obsługa pras i wiele innych procesów przemysłowych, wymagających
znacznego wysiłku fizycznego, szkodliwych i niebezpiecznych dla człowieka. Rozwój
15

techniki komputerowej umożliwia rozwój metod symulacji komputerowej z zakresu
projektowania zrobotyzowanych stanowisk technologicznych.
Robotyka maszyn kroczących jest dziedziną zajmującą się projektowaniem i
sterowaniem ruchu jedno-, dwu- i wielonożnych maszyn kroczących lub mieszanych nożno-
kołowych. Budowę tych maszyn wzoruje się na budowie i ruchu owadów, ssaków lub gadów.
Wybór chodu dostosowanego do terenu czy zapewniającego dobrą mobilność robota, jest
jednym z podstawowych, chociaż trudnych, zagadnień badawczych.
Prace badawcze w dziedzinie robotyki medycznej i rehabilitacyjnej koncentrują się na
zagadnieniach zastosowania robotów do celów chirurgii, terapii, wspomagania w przypadku
niedowładów kończyn człowieka oraz obsługi pacjentów. Interesującym przykładem
wykorzystania robota w dziedzinie chirurgii może być zastosowanie robota do operacji
usuwania tkanki w czaszce pacjenta, innym jeszcze są manipulatory rehabilitacyjne sterowane
głosem lub ruchami głowy, brody, gałki ocznej.
W ostatnich latach notuje się intensywny rozwój robotyki dziedzinowej do celów poza
przemysłowych. Są to manipulatory umieszczane na statkach podwodnych do badania
zasobów podwodnych, manipulatory na statkach kosmicznych - do konserwacji satelitów
telekomunikacyjnych i pobierania próbek na innych planetach. Rozwija się grupa robotów
przystosowanych do gaszenia pożarów lub do prac związanych z usuwaniem skutków
katastrof, do celów inspekcyjnych i likwidacji działań terrorystów, gdzie obecność człowieka
jest niepożądana. W obsłudze sfery gospodarczej i handlu obserwuje się obecnie zastosowanie
robotów do zadań związanych z pakowaniem, paletyzacja i transportowaniem towarów. W
rolnictwie należy oczekiwać wzrostu robotyzacji procesów suszenia ziarna, nawadniania,
nawożenia, zbioru tytoniu, warzyw, owoców, sortowania i pakowania owoców itp. W
budownictwie przewiduje się zrobotyzowanie prac ziemnych, układanie elewacji budynków i
inne. Ekspansji systemów zrobotyzowanych oczekuje się w pracach administracyjno-
biurowych i domowych. Zapewne niedługo pojawią się roboty osobiste przez analogię do
komputerów PC.
5. Prawa robotyki
Robotykę jako naukę charakteryzują pewne prawa. Pierwsze trzy prawa, zwane
kanonami robotyki, sformułował w latach pięćdziesiątych ubiegłego wieku Isaac Asimov w
powieści „The Caves of Steel":
Pierwsze prawo robotyki:
Robot nie może ingerować w działanie człowieka, oprócz tych działań, które szkodzą
człowiekowi.
Drugie prawo robotyki:
Robot musi być posłuszny rozkazom wydawanym przez człowieka, oprócz tych rozkazów,
które są sprzeczne z pierwszym prawem.
Trzecie prawo robotyki:
Robot musi chronić swoją egzystencje, oprócz tych przypadków, które są sprzeczne z
pierwszym lub drugim prawem.
16

Trzy prawa (kanony) robotyki mają charakter uniwersalny i ponadczasowy. Nie
wymagają komentarza. Oprócz tych fundamentalnych praw w ostatnich latach sformułowano
wiele innych.
Czwarte prawo robotyki (Campbella i Dilowa):
Robot musi ujawniać swoją naturę robota. W szczególności robot nie może udawać
człowieka.
Piąte prawo robotyki można sformułować następująco:
Im bogatsze jest wyposażenie robota w układy sensoryczne, zapewniające percepcję
warunków otoczenia, a w szczególności możliwości autonomicznego określania działań przez
jego układ sterowania, tym - do pewnego dopuszczalnego stopnia - może być uboższa, mniej
złożona jego konstrukcja. Ten dopuszczalny stopień jest zależny od celu, który został przed
robotem postawiony oraz od możliwości zrealizowania tego celu przez robota.
Często stwierdza się, że można formułować wiele podobnych praw o rożnej doniosłości: tu
będzie przytoczone jeszcze jedno, stanowiące odpowiednik powiedzenia: ,,mądry głupiemu
ustępuje”. Jest to pewna wersja prawa Kopernika-Grahama. Brak jest cech charakteryzujących
„mądre" i „głupie roboty”. Można się tylko posłużyć ilorazem inteligencji, naturalnie o ile
istnieje możliwość określenia ilorazu inteligencji robota. Wtedy byłoby do przyjęcia
traktowanie robota z większym ilorazem inteligencji jako mądrzejszego, a robota z mniejszym
ilorazem inteligencji jako mniej mądrego. Pozostałoby jeszcze do ustalenia, w jakim sensie
można mówić o ustępowaniu robotów. Oczywiście istnieje wiele możliwości interpretacji, a
jedną z prostszych jest następująca:
Jeśli cele dwóch robotów kolidują ze sobą, to najpierw powinna zostać zrealizowana
strategia tego robota, którego iloraz inteligencji jest niższy.
W związku z rozwojem robotyki i prowadzonymi badaniami z tego zakresu zapewne
będą odkryte i sformułowane następne prawa.
17
Wyszukiwarka
Podobne podstrony:
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
CHRAPEK,podstawy robotyki, elementy sk adowe i struktura robotów
CHRAPEK,podstawy robotyki, Przyk ady konstrukcji robotów przemys owych
CHRAPEK,podstawy robotyki, konstrukcja mechaniczna manipulatora
CHRAPEK,podstawy robotyki, Rozwój robotów
CHRAPEK,podstawy robotyki, Nap dy robotów nap dy pneumatyczne
CHRAPEK,podstawy robotyki, Sterowanie robotów przemys owych
CHRAPEK,podstawy robotyki, Nap dy robotów nap dy hydrauliczne
CHRAPEK,podstawy robotyki, Uk a Nieznany
CHRAPEK,podstawy robotyki, Nap dy robotów nap dy elektryczne
CHRAPEK,podstawy robotyki, Metodyka wprowadzania robotów do przemys u
CHRAPEK,podstawy robotyki, Roboty przemys owe jako narz dzia
CHRAPEK,podstawy robotyki, Roboty i manipulatory o strukturach równoleg ych
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
więcej podobnych podstron