1. Przyspieszenie
Je
ż
eli dany wektor r
>
okre
ś
la poło
ż
enie punktu
materialnego a wektor v
>
okre
ś
la pr
ę
dko
ść
tego
punku, to przy
ś
pieszenie a
>
tego punktu jest
pochodn
ą
pr
ę
dko
ś
ci po czasie:
a
>
= dv
>
/ dt
>
poniewa
ż
pr
ę
dko
ść
jest pochodn
ą
poło
ż
enia po
czasie, to przyspieszenie mo
ż
na zapisa
ć
jako
druga pochodn
ą
poło
ż
enia po czasie:
a
>
= d
2
r
>
/ dt
2
Jednostk
ą
przyspieszenia w SI jest metr na
sekund
ę
do kwadratu.
[a
>
] = m/s
2
2. Praca wykonana przez stał
ą
sił
ę
:
A) (F=const)
Gdy na ciało działa siła F=const - ruch zachodzi po
linii prostej zgodnie z kierunkiem działania siły.
Praca W - wykonana przez sił
ę
przy
przemieszczeniu ciała
W= F s = |F| |s| cos
αααα
SI: [J=N m]
αααα
- k
ą
t pomi
ę
dzy F i s
s - przemieszczenie
W= F s (dla
αααα
=0) ********* W= F s= 0 (dla
αααα
=90)
Praca jest skalarem, dodatnia lub ujemna.
***ujemna - ciało ma składow
ą
ruchu przeciwn
ą
do
działaj
ą
cej siły F
***dodatnia - ciało ma składow
ą
ruchu zgodn
ą
z
kierunkiem działaj
ą
cej siły F (jak rys)
Działanie sił
B F
≠≠≠≠
const
Przyspieszenie cz
ą
stki a otrzymujemy z II zasady
dynamiki Newtona stosuj
ą
c rachunek całkowy.
Wzory v(t) i x(t) nie obowi
ą
zuj
ą
bo a
≠≠≠≠
const.
Siły (F=F(x)) zmieniaj
ą
ce si
ę
wraz z poło
ż
eniem
cz
ą
stki to np. siły grawitacyjne, spr
ęż
ysto
ś
ci.
Okre
ś
lenie ruchu cz
ą
steczek pod wpływem tych sił
prowadzi do poj
ę
cia pracy i energii kinetycznej
oraz poj
ę
cia energii.
Z energi
ą
, która odgrywa ogromna rol
ę
w rozwoju
fizyki zwi
ą
zana jest prawdopodobnie najwa
ż
niejsza
zasada: zachowania energii.
3. Moment p
ę
du.
Moment p
ę
du cz
ą
stki (taka sama rola jak p
ę
d)
p
>
=m v
>
a L
>
=I
ω
ωω
ω
>
Cz
ą
stka o masie m, p
ę
dzie p w odległo
ś
ci r od
pocz
ą
tku układu współrz
ę
dnych 0.
θ
- k
ą
t mi
ę
dzy r i p
r – poło
ż
enie cz
ą
stki wzgl. wybranego inercjalnego
układu odniesienia.
L
>
=r
>
p
>
L=r p sin
θ
4. Równanie ruchu oscylatora prostego i jego
rozwi
ą
zanie.
m(d
2
x / dt
2
) + kx = 0
Gdy znamy rozwi
ą
zanie równania - zale
ż
no
ść
:
x = x(t), to znamy ruch cz
ą
stki.
Znajdujemy rozwi
ą
zanie równania ruchu dla
oscylatora:
sprawd
ź
my, czy rozwi
ą
zaniem b
ę
dzie:
A,
ω
ωω
ω
, f - stałe
podstawiamy do równania oscylatora:
zatem: x=Acos(
ω
ωω
ω
t+
δδδδ
)
Rozwi
ą
zanie równania oscylatora
harmonicznego prostego:
Funkcja cos przyjmuje warto
ś
ci od -1 do 1, czyli
przemieszczenie x od poło
ż
enia równowagi (x=0)
osi
ą
ga warto
ść
maksymaln
ą
x
max
= A, czyli
A - amplituda ruchu
(
ω
ωω
ω
t+
δδδδ
) - faza ruchu,
δδδδ
- stała fazowa (faza pocz.)
5. Prawo powszechnego ci
ąż
enia
Stosuje si
ę
do wszystkich sił grawitacyjnych
(Newtona)
Dwa punkty materialne o masach M i m oddziałuja
na siebie (przyci
ą
gaj
ą
) wzajemnie sił
ą
F:
F = G(Mm) / r
2
lub: F
>
= [-G(Mm)/r
3
] r
>
gdzie:
r - odległo
ść
punktów materialnych
G - stała grawitacji
6. Nat
ęż
enie pola elektrycznego
N. pola el. definiujemy jako sił
ę
działaj
ą
c
ą
na
ładunek próbny q (umieszony w danym punkcie
przestrzeni) podzielon
ą
przez ten ładunek.
Analogicznie do nat
ęż
enia pola grawitacyjnego
(E=F/m):
E
>
=F
>
/q
ładunek próbny jest umownie dodatni, kierunek E
>
jest taki sam jak siły F
>
działaj
ą
cej na ładunek.
Pole elektryczne od n ładunków punktowych jest
równe sumie wektorowej pól elektrycznych
(zasada superpozycji):
7. Prawo Gaussa dla pola elektrycznego:
Niech zamkni
ę
ta powierzchnia obejmuje dwa
ładunki Q
1
i Q
2
. Całkowita liczba linii sił przecinaj
ą
ca
powierzchni
ę
zamkni
ę
t
ą
wokół ładunków Q
1
i Q
2
jest równa:
gdzie:
E
1
- jest wytwarzane przez Q
1
a E
2
przez Q
2
.
Powołuj
ą
c si
ę
na wcze
ś
niejszy wynik otrzymujemy:
φφφφ
całk
=(Q
1
/
εεεε
0
) + (Q
2
/
εεεε
0
) = (Q
1
+ Q
2
) /
εεεε
0
Całkowita liczba linii sił jest równa całkowitemu
ładunkowi podzielonemu przez
ε
0
.
Podobnie mo
ż
na pokaza
ć
dla dowolnej liczby n
ładunków:
Prawo Gaussa - strumie
ń
pola wychodz
ą
cy z
naładowanego ciała jest równy wypadkowemu
ładunkowi podzielonemu przez
ε
0
.
Je
ż
eli Q jest ujemne strumie
ń
pola wpływa do ciała.
Linie mog
ą
zaczyna
ć
si
ę
i ko
ń
czy
ć
tylko na
ładunkach, a wsz
ę
dzie poza tym s
ą
ci
ą
głe.
8. Prawo załamania.
Formułowane bazuj
ą
c na zało
ż
eniach optyki
geometrycznej. Promie
ń
padaj
ą
cy biegn
ą
cy w
o
ś
rodku pierwszym pada na granic
ę
o
ś
rodków po
czym zmienia kierunek (załamuje si
ę
) i jako
promie
ń
załamany biegnie w o
ś
rodku drugim.
Prawo Snelliusa mówi,
ż
e promie
ń
padaj
ą
cy i
załamany oraz prostopadła padania (normalna) le
żą
w jednej płaszczy
ź
nie, a k
ą
ty spełniaj
ą
zale
ż
no
ść
:
gdzie:
n
1
– współczynnik załamania
ś
wiatła o
ś
rodka
pierwszego,
n
2
– współczynnik załamania
ś
wiatła o
ś
rodka
drugiego,
n
21
– wzgl
ę
dny współczynnik załamania
ś
wiatła
o
ś
rodka drugiego wzgl
ę
dem pierwszego,
θ
1
– k
ą
t padania, k
ą
t mi
ę
dzy promieniem
padaj
ą
cym a normaln
ą
do powierzchni granicznej
o
ś
rodków,
θ
2
– k
ą
t załamania, k
ą
t mi
ę
dzy promieniem
załamanym a normaln
ą
.
Je
ż
eli
ś
wiatło przechodzi z o
ś
rodka o mniejszym
współczynniku załamania
ś
wiatła do o
ś
rodka o
współczynniku wi
ę
kszym (np. powietrze-woda), tak
jak na rysunku, to k
ą
t załamania jest mniejszy od
k
ą
ta padania. Je
ż
eli na odwrót (szkło-powietrze) –
k
ą
t załamania jest wi
ę
kszy.
Współczynnik załamania dla danego o
ś
rodka ro
ś
nie
wraz z g
ę
sto
ś
ci
ą
, np. w atmosferze maleje wraz z
wysoko
ś
ci
ą
. Dla ró
ż
nych o
ś
rodków tendencja ta jest
na ogół równie
ż
zachowana, ale nie jest reguł
ą
.
Przykładem mo
ż
e by
ć
etanol, który ma mniejsz
ą
g
ę
sto
ść
ni
ż
woda, ale wi
ę
kszy współczynnik
załamania.
9. Energia kinetyczna, potencjalna i całkowita
E
k
= mv
2
/2, E
p
= W = Fh = mgh, E=mc
2
10. Wyprowadzanie wzoru na I i II pr
ę
dko
ść
kosmiczn
ą
.
>>> I pr
ę
dko
ść
kosmiczna:
mv
2
/R = GMm/R
2
v
2
=GM/R
v
1
=
pierwiastek
(GM/R)
gdzie:
G -stała grawitacji
M -masa ciała niebieskiego
m -masa rozp
ę
dzonego ciała(kr
ążą
cego wokół ciała
niebieskiego)
R -promie
ń
orbity
>>> II pr
ę
dko
ść
kosmiczna:
E = -GMm/R + mv
2
/2
gdzie:
M -masa ciała niebieskiego
m -masa wystrzeliwanego ciała
v -pr
ę
dko
ść
pocz
ą
tkowa
R -promie
ń
ciała niebieskiego
St
ą
d:
v
2
=
pierwiastek
(2GM/R) = v
1
pierw
(2)
11. Zasada zachowania p
ę
du.
a) gdy mamy do czynienia z układem pkt.
materialnych o masach m
1
...m
n
i M=
Σ
m
i
b) P - całkowity p
ę
d układu pkt. - suma wektorowa
pojedynczych p
ę
dów
p =
ΣΣΣΣ
p
i
=
ΣΣΣΣ
m
i
v
i
= const.
p
>
= Mv
>
ś
rm
Całkowity p
ę
d układu punktów materialnych jest
równy iloczynowi całkowitej masy i pr
ę
dko
ś
ci
ś
rodka
jego masy.
Prawo zachowania p
ę
du - je
ż
eli wypadkowa sił
zewn
ę
trznych działaj
ą
cych na układ wynosi zero
(F
zew
=0) wtedy całkowity p
ę
d układu pozostaje
stały.
czyli,
całkowity p
ę
d układu odosobnionego jest wielko
ś
ci
ą
stał
ą
w ka
ż
dym czasie.
wtedy P
>
=const.
Układ odosobniony(zamkni
ę
ty lub izolowany) -
układ na który nie działaj
ą
ż
adne siły zewn
ę
trzne.
12. Energia potencjalna
Siły F(x) zale
ż
ne od poło
ż
enia x s
ą
siłami
zachowawczymi.
Spadek energii ruchu E
k
jest zwi
ą
zany ze wzrostem
energii potencjalnej (poło
ż
enia) E
p
czyli:
∆∆∆∆
E
k
= -
∆∆∆∆
E
p
bo
∆∆∆∆
E
p
+
∆∆∆∆
E
k
=const.
czyli ka
ż
da zmiana E
k
jest zwi
ą
zana z przeciwn
ą
zmian
ą
E
p
ale:
Zale
ż
no
ść
mi
ę
dzy sił
ą
F, a energi
ą
potencjaln
ą
E
p
mo
ż
na zapisa
ć
nast
ę
puj
ą
co:
Równanie to wyra
ż
a fizyczne znaczenie energii
potencjalnej:
Energia potencjalna jest funkcj
ą
poło
ż
enia, której
ujemna pochodna daje sił
ę
.
Energia E
p
przedstawia form
ę
nagromadzonej
energii, która mo
ż
e by
ć
całkowicie odzyskana i
zamieniona na E
k
. Nie mo
ż
na wi
ę
c wzi
ąć
E
p
z sił
ą
niezachowawcz
ą
.
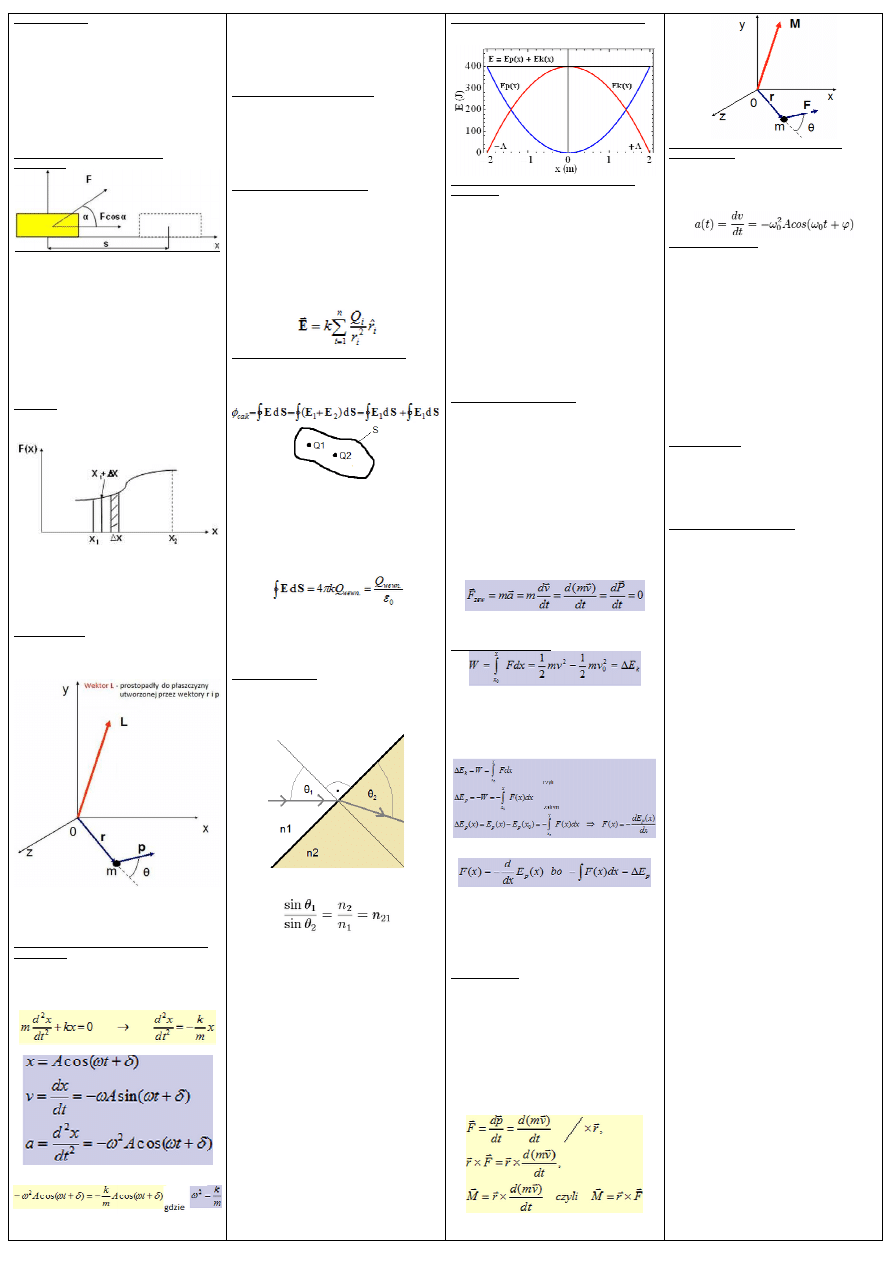
13. Moment Siły
Moment siły cz
ą
stki - je
ż
eli siła F działa na cz
ą
stke
w punkcie P odległym o r wzgl
ę
dem pewnego
punktu odniesienia 0, to moment siły M wzgl
ę
dem
pocz
ą
tku układu definiujemy jako:
M
>
= r
>
F
>
M = r F sin
φφφφ
M
>
⊥
⊥⊥
⊥
F
>
, r
>
r -wektor wodz
ą
cy punktu przyło
ż
enia działaj
ą
cej
siły, okre
ś
la poło
ż
enie cz
ą
stki wzgl. wybranego
inercjalnego układu odniesienia (lub rami
ę
siły)
M -moment siły wzgl
ę
dem pkt. 0
φφφφ
-k
ą
t mi
ę
dzy r a F
Wiemy,
ż
e:
14. Wychylenie i przyspieszenie w ruchu
harmonicznym.
F
>
= -k x
>
gdzie:
F -siła
k -współcz. proporcjonalno
ś
ci
x -wychylenia z poło
ż
enia równowagi
15. Prawo Coulomba
Siła oddziaływania dwóch ładunków q1 i q2
(naładowanych ciał)
F = k q
1
q
2
/ r
2
gdzie stała k = 1 / 4
Π
Π
Π
Πεεεε
0
εεεε
0
= 8,854 x 10
-12
[C
2
/Nm
2
] - przenikalno
ść
elektryczna pró
ż
ni (stała dialektyczna).
Stała dialektyczna substancji lub wzgl
ę
dna
przenikalno
ść
elektryczna o
ś
rodka jest wielko
ś
ci
ą
charakterystyczn
ą
dla nowego o
ś
rodka, zawsze
wi
ę
ksza od 1.
Dla wody
ε
=81, pró
ż
ni
ε
=1, dla powietrza
ε
=1,0006.
Za pomoc
ą
prawa Coulomba mo
ż
na opisa
ć
:
--Oddziaływanie mi
ę
dzy poszczególnym
elektronami oraz pomi
ę
dzy elektronami a j
ą
drem
atomowym.
--Siły oddziaływania mi
ę
dzy atomami tworz
ą
cymi
cz
ą
steczk
ę
lub ciało stałe.
16. Siła Lorentza
F = q(E + v
x
B)
F -wektor siły [N]
q -ładunek elektryczny cz
ą
stki [C]
E -wektor nat
ęż
enia pola elektrycznego [V/m]
B -pseudowektor indukcji magnetycznej [T]
v -wektor pr
ę
dko
ś
ci cz
ą
stki [m/s]
x -iloczyn wektorowy.
18. Zjawisko fotoelektrzyczne
Zaproponowane przez Alberta Einsteina
wyja
ś
nienie zjawiska i jego opis matematyczny
oparte jest na zało
ż
eniu,
ż
e energia wi
ą
zki
ś
wiatła
pochłaniana jest w postaci porcji (kwantów).
Kwant promieniowania pochłaniany jest przy tym w
cało
ś
ci. Einstein zało
ż
ył dalej,
ż
e usuni
ę
cie
elektronu z powierzchni metalu (substancji)
wymaga pewnej pracy zwanej prac
ą
wyj
ś
cia, która
jest wielko
ś
ci
ą
charakteryzuj
ą
c
ą
dan
ą
substancj
ę
(stał
ą
materiałow
ą
). Pozostała energia unoszona
jest przez emitowany elektron. Z tych rozwa
ż
a
ń
wynika wzór:
hv = W + E
k
gdzie:
h -stała Plancka
v -cz
ę
stotliwo
ść
padaj
ą
cego fotonu
W -praca wyj
ś
cia
E
k
-maksymalna energia kinetyczna emintowanych
elektronów.
Wyszukiwarka
Podobne podstrony:
EGZAMIN mini
fiz egzamin opracowanie pro
Ekonomika egzamin mini
Metodologia Egzamin Mini, Biotechnologia, Metodologia prac doświadczalnych
Prawo pracy egzamin - MINI, PRAWO, Prawo pracy
egzaminowe mini, Fizyka
Egzamin mini wersja
Marketing przemysłowy EGZAMIN mini
antropologia egzamin mini, Antropologia
ściągi na egzamin - mini, Prokariota: nukleoid, mezosomy, rybosomy
ściąga metro elektr egzamin mini
więcej podobnych podstron