1
Wykład 4
Energia kinetyczna i praca.
Energia kinetyczna i praca.
Energia potencjalna
Energia potencjalna
Wrocław University of Technology
5-XI-2011
2
Praca
Kto wykonał wi
ę
ksz
ą
prac
ę
?
ENERGIA KINETYCZNA I PRACA
5.XI.2011
Hossein Rezazadeh
Olimpiada w Atenach 2004 WR
Podrzut 263 kg
Paul Anderson
Rekord Guinnessa 1957
Ci
ęż
ar 27900N (2850kg)

3
Energia
Energia – wielko
ść
skalarna opisuj
ą
ca stan w jakim si
ę
w danym
momencie znajduje jedno lub wiele ciał.
ENERGIA KINETYCZNA I PRACA
5.XI.2011
Termin energia pochodzi od greckiego słowa „energeia” u
ż
ywanego
ju
ż
przez Arystotelesa i w ró
ż
nych tłumaczeniach oznacza
działanie, przyczyn
ę
ruchu, moc.
A jak nale
ż
y rozumie
ć
słowo energia w j
ę
zyku fizyki?
Słownik wyrazów obcych PWN: „… wielko
ść
fizyczna okre
ś
laj
ą
ca
zdolno
ść
ciała lub układu ciał do wykonywania pracy przy
przej
ś
ciu z jednego stanu do drugiego”
4
Energia kinetyczna
ENERGIA KINETYCZNA I PRACA
5.XI.2011
Energię kinetyczną E
k
ciała o masie m, poruszającego się z prędkością
o wartości v, znacznie mniejszej od prędkości światła, definiujemy
jako:
2
2
1
mv
E
k
=
Jednostką energii kinetycznej (i każdego innego
rodzaju energii) w układzie SI jest dżul (J).
Nazwa ta pochodzi od nazwiska XIX-wiecznego
uczonego angielskiego, Jamesa Prescotta Joule'a.
James Prescott Joule
2
2
1
s
m
kg
J
⋅
=

5
Energia kinetyczna
ENERGIA KINETYCZNA I PRACA
5.XI.2011
W 1896 roku w Waco, w Teksasie William Crush na oczach 30000 widzów
ustawił dwie lokomotywy naprzeciwko siebie, na końcach toru o długości
6.4km. Zablokował dźwignie w położeniu pełnego gazu i pozwolił
rozpędzonym lokomotywom zderzyć się ze sobą czołowo. Wyznacz łączną
energię kinetyczną lokomotyw tuż przed zderzeniem zakładając, że każda z
nich miała ciężar równy 1.2
.
10
6
N, a przyspieszenia obydwu lokomotyw
wzdłuż toru były stałe i wynosiły 0.26 m/s
2
.
przed
po
6
Energia kinetyczna
ENERGIA KINETYCZNA I PRACA
5.XI.2011
Przyspieszenie każdej z lokomotyw było stałe, więc do obliczenia
jej prędkości v tuż przed zderzeniem możemy zastosować wzór:
(
)
s
m
v
x
x
a
v
v
/
8
.
40
2
0
2
0
2
=
−
+
=
(
)
(
)
J
s
m
kg
mv
E
k
8
5
2
10
2
/
8
.
40
10
22
.
1
2
1
2
⋅
=
⋅
⋅
=
=
Energia wybuchu trotylu:
E
zderzenia lokomotyw
≈
51kg trotylu
kg
J
E
WT
/
10
9
.
3
6
⋅
=
7
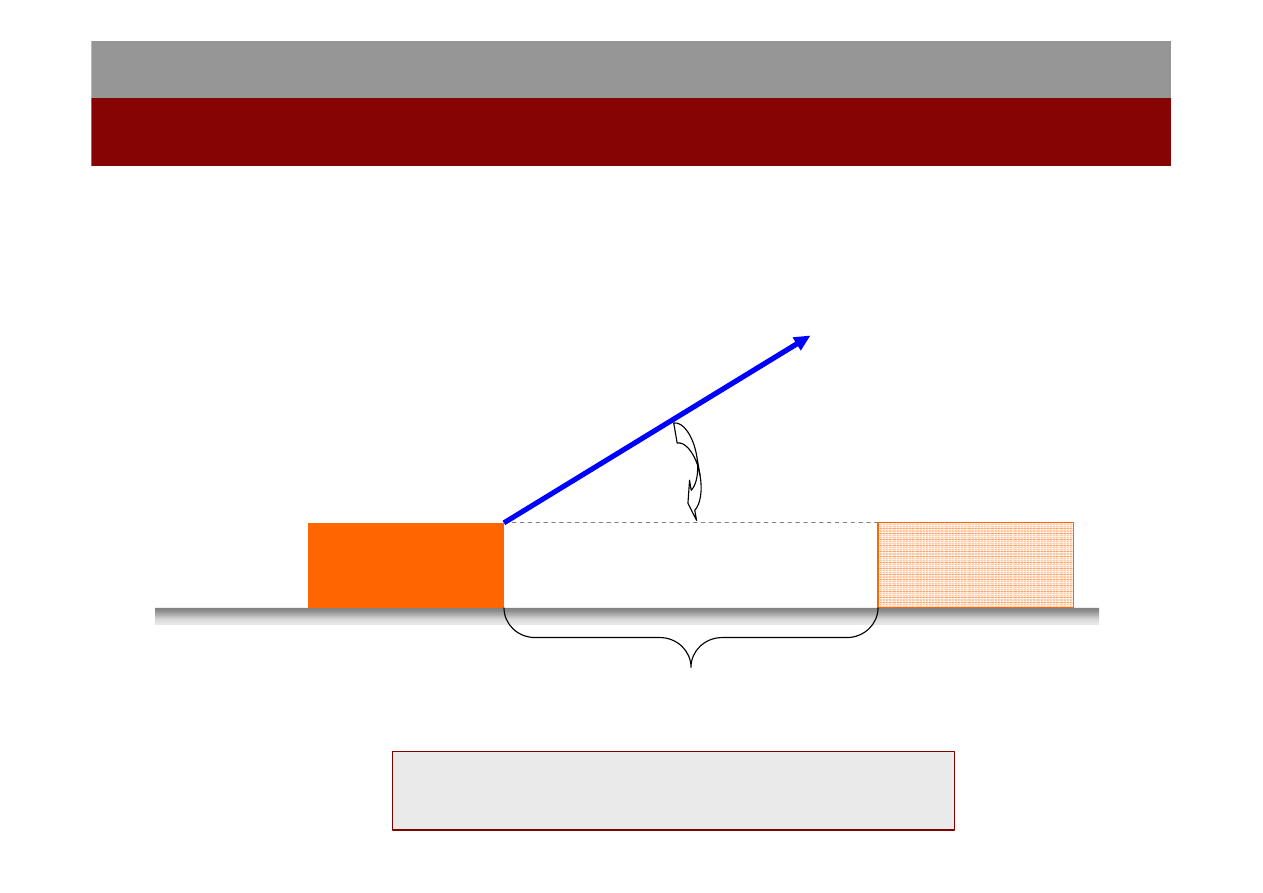
Praca
ENERGIA KINETYCZNA I PRACA
5.XI.2011
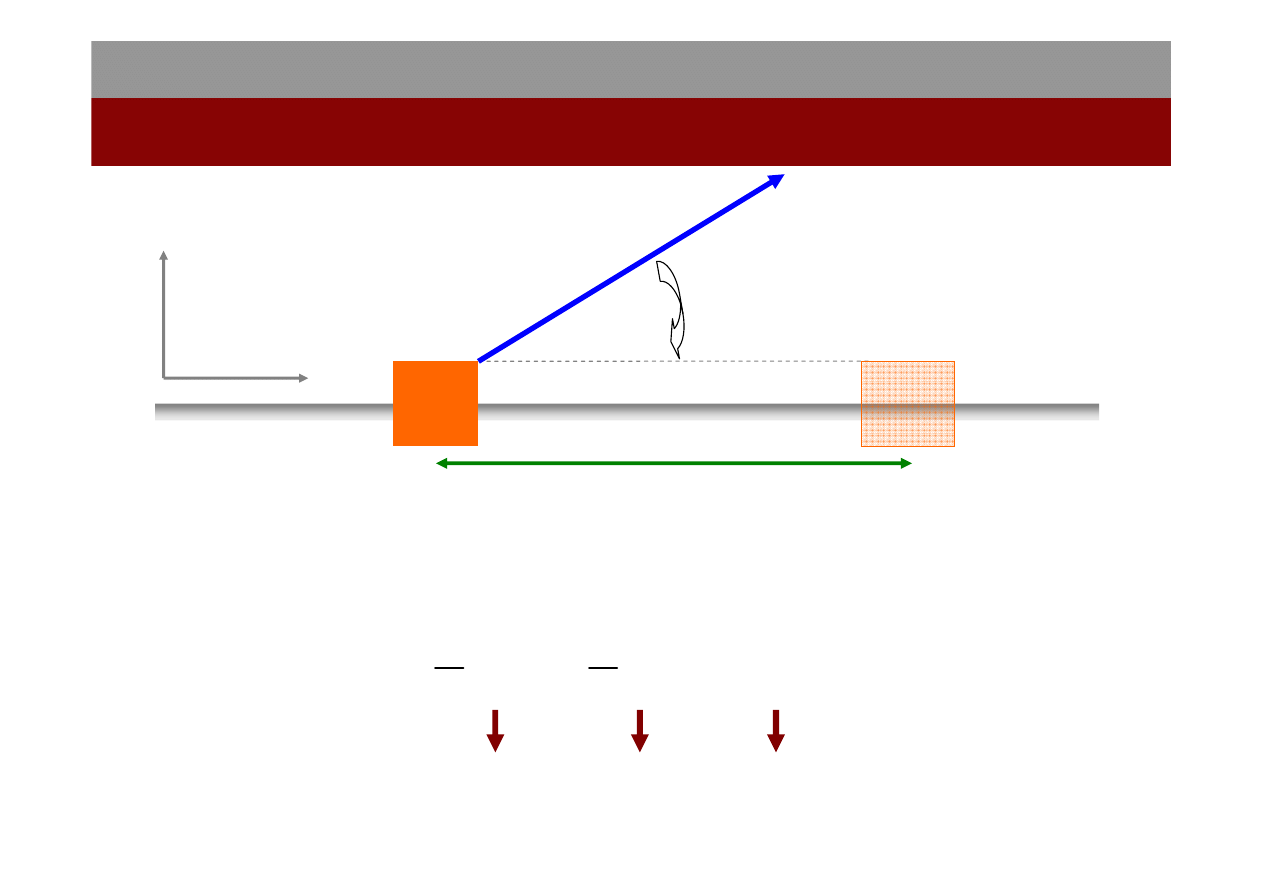
Praca W jest to energia przekazana ciału lub od niego odebrana na
drodze działania na ciało sił
ą
. Gdy energia jest przekazana ciału,
praca jest dodatnia, a gdy energia jest ciału odebrana, praca jest
ujemna.
F
r
α
r
∆
α
cos
r
F
r
F
W
∆
⋅
=
∆
=
r
o
r

8
Praca
ENERGIA KINETYCZNA I PRACA
5.XI.2011
Jeśli siła jest funkcją położenia, tzn. F = F(r) to całkowite przemieszczenie
ciała rozkładamy na n odcinków, tak aby w każdym z nich siłę można
uważać za stałą. Wówczas praca całkowita wykonana przez siłę F(r) przy
przesunięciu ciała z punktu 1 do punktu 2, których położenia są dane przez
promienie wodzące r
1
i r
2
, wynosi:
( )
( )
( )
( )
∫
∑
∫
∑
⋅
=
⋅
=
∆
⋅
=
∆
⋅
=
→
=
→
∆
=
2
1
2
1
1
0
1
lim
)
2
1
(
r
r
n
i
r
r
i
i
r
i
n
i
i
r
d
r
F
W
r
d
r
F
r
r
F
r
r
F
W
i
r
r
r
r
r
r
r
r
r
r
r
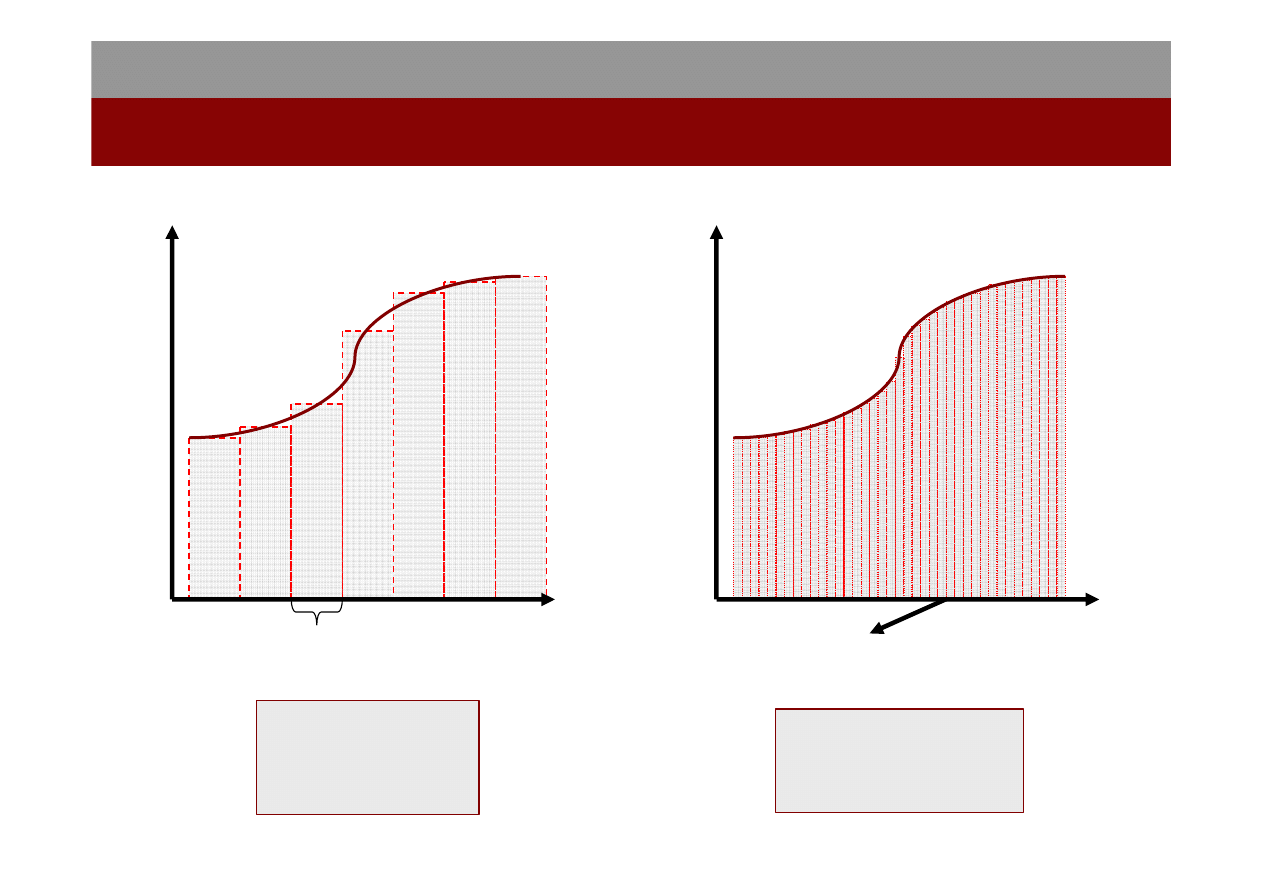
9
Praca
∑
∆
⋅
=
n
r
F
W
r
r
ENERGIA KINETYCZNA I PRACA
5.XI.2011
F
r
r
r
r
r
F
r
r
∆
dr
∫
=
r
d
F
W
r
r
10
Praca
ENERGIA KINETYCZNA I PRACA
5.XI.2011
Jeśli , tzn. kąt między kierunkiem F i dr jest mniejszy od
90
o
, to wówczas W>0, czyli praca wykonana przez siłę F jest dodatnia.
Przykładem takiej sytuacji jest praca wykonana przez siły grawitacji
podczas swobodnego spadku ciała. Jeśli natomiast , tzn.
kąt między F i dr jest większy od 90
o
, to praca siły F jest ujemna.
Przykładem takich sił są siły oporu ruchu.
Jednostka pracy: dżul.
0
)
,
cos(
>
r
d
F
r
r
0
)
,
cos(
<
r
d
F
r
r
m
N
s
m
kg
J
1
1
1
1
1
2
2
⋅
=
⋅
=
11
Praca
ENERGIA KINETYCZNA I PRACA
5.XI.2011
Gdy na ciało działa wektor siły
k
F
j
F
i
F
F
z
y
x
ˆ
ˆ
ˆ
+
+
=
r
w wyniku której cząstka doznaje niewielkiego przesunięcia
k
dz
j
dy
i
dx
r
d
ˆ
ˆ
ˆ
+
+
=
r
praca wynosi
dz
F
dy
F
dx
F
r
d
F
W
z
y
x
+
+
=
⋅
=
r
r
Całkowita praca z punktu pocz do punktu kon
∫
∫
∫
∫
+
+
=
⋅
=
kon
pocz
kon
pocz
kon
pocz
kon
pocz
r
r
z
r
r
y
r
r
x
r
r
dz
F
dy
F
dx
F
r
d
F
W
r
r
12
Praca a energia kinetyczna
ENERGIA KINETYCZNA I PRACA
5.XI.2011
d
ma
mv
mv
x
⋅
=
−
2
0
2
2
1
2
1
F
r
α
0
v
r
v
r
d
r
d
a
v
v
x
r
r
⋅
+
=
2
2
0
2
x
y
d
F
E
E
x
K
K
pocz
kon
⋅
=
−
13
Praca a energia kinetyczna
ENERGIA KINETYCZNA I PRACA
5.XI.2011
Ponieważ
więc
dt
v
r
d
r
r
=
( )
( )
∫
∫
⋅
=
⋅
=
2
1
2
1
t
t
r
r
dt
v
r
F
r
d
r
F
W
r
r
r
r
r
r
Jeśli założymy, że masa ciała jest stała, to wtedy
dt
v
d
m
a
m
F
r
r
r
=
⋅
=
2
2
2
2
1
2
2
2
2
1
2
1
v
m
v
m
v
m
v
d
v
m
W
v
v
v
v
−
=
=
⋅
=
∫
v
v
r
r
Gdzie v
1
i v
2
są prędkościami ciała odpowiednio w punkcie 1 i 2.
14
Praca a energia kinetyczna
ENERGIA KINETYCZNA I PRACA
5.XI.2011
Zmiana energii kinetycznej ciała jest równa pracy wykonanej nad tym
ciałem:
W
E
E
E
pocz
kon
K
K
K
=
−
=
∆
ZMIANA ENERGII
KINETYCZNEJ CZĄSTKI
CAŁKOWITA PRACA
WYKONANA NAD CZĄSTKĄ
=
Związek ten można zapisać inaczej
W
E
E
pocz
kon
K
K
+
=
ENERGIA
KINETYCZNEJ PO
WYKONANIU PRACY
=
ENERGIA
KINETYCZNEJ PRZED
WYKONANIEM PRACY
CAŁKOWITA PRACA
WYKONANA NAD
CZĄSTKĄ
+
15
Moc
ENERGIA KINETYCZNA I PRACA
5.XI.2011
Jeżeli w przedziale czasu ∆t została wykonana praca ∆W, to średnia
moc P jest określana
t
W
P
∆
∆
=
Mocą chwilową nazywamy granicę do jakiej zmierza moc średnia
gdy ∆t = 0
dt
dW
t
W
P
t
=
∆
∆
=
→
∆
0
lim
Moc chwilowa jest więc pochodną pracy względem czasu.
16
Moc
ENERGIA KINETYCZNA I PRACA
5.XI.2011
v
F
dt
dr
F
dt
dW
P
⋅
=
⋅
=
=
W zapisie wektorowym
v
F
P
r
r
⋅
=
Moc danej siły F jest proporcjonalna do prędkości v.
Jednostką mocy w układzie SI jest wat [W]. Moc jest równa
jednemu watowi, jeżeli stała siła wykonuje pracę jednego dżula w
czasie jednej sekundy.
s
J
J
1
1
1
=

17
Energia potencjalna
ENERGIA POTENCJALNA
5.XI.2011
W
E
p
−
=
∆
Definicja energii potencjalnej E
p
: jest to energia związana z
konfiguracją (czyli ustawieniem) układu ciał, działających na
siebie siłami. Gdy zmienia się konfiguracja tych ciał, może się
również zmieniać energia potencjalna układu.
Zmianę grawitacyjnej energii potencjalnej ∆E
p
definiujemy —
zarówno dla wznoszenia, jak i dla spadku ciała — jako pracę
wykonaną nad ciałem przez siłę ciężkości, wziętą z przeciwnym
znakiem. Oznaczając pracę — jak zwykle — symbolem W,
zapisujemy to stwierdzenie w postaci:

18
Siły zachowawcze i niezachowawcze
ENERGIA POTENCJALNA
5.XI.2011
W sytuacji, gdy zawsze spełniony jest związek W
1
= — W
2
,
energia kinetyczna zamieniana jest na energię potencjalną, a siłę
nazywamy siłą zachowawczą. Siła ciężkości i siła sprężystości są
siłami zachowawczymi (gdyby tak nie było. nie moglibyśmy mówić
o grawitacyjnej energii potencjalnej i energii potencjalnej
sprężystości).
Siłę, która nie jest zachowawcza, nazywamy siłą niezachowawczą.
Siła tarcia kinetycznego i siła oporu są niezachowawcze.
19
Siły zachowawcze i niezachowawcze
5.XI.2011
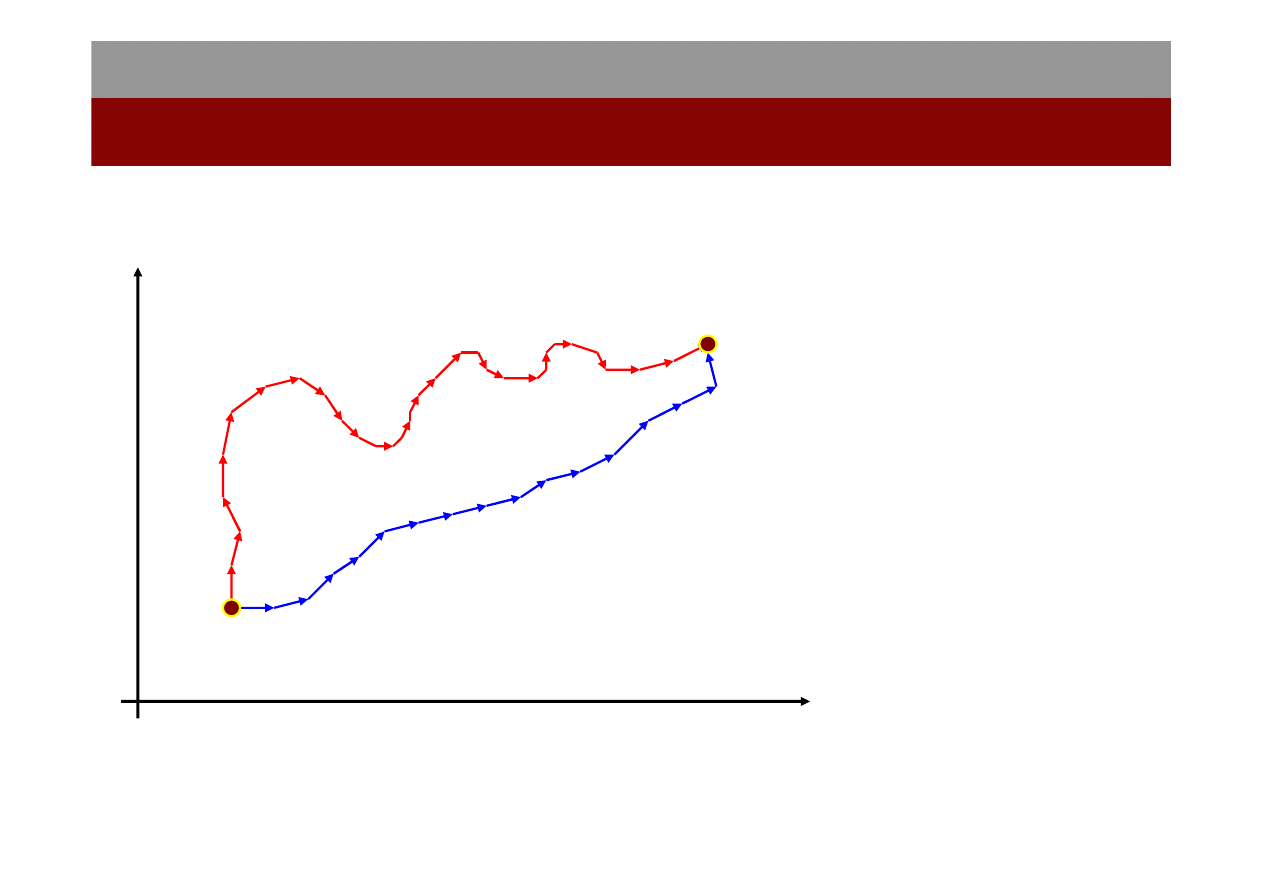
Ile wynosi praca przesunięcia masy m pod działaniem siły F(x,y) z punktu 1 do
2 po drodze A oraz B?
B
A
2
1
Jeśli praca przemieszczenia
masy m między punktami A i B
nie zależy od drogi po której
nastąpiło przemieszczenie to
mówimy, że siła jest
zachowawcza, albo potencjalna.
Praca przemieszczenia masy m z punktu A po drodze 1 do punktu B i potem z
punktu B po drodze 2 do punktu A wynosi zero.

20
Energia potencjalna
ENERGIA POTENCJALNA
5.XI.2011
Jeżeli praca przemieszczenia masy m po drodze (krzywej) zamkniętej wynosi
zero to mówimy, że siła jest zachowawcza, albo potencjalna.
Możemy zapisać pracę siły F(x,y) na drodze elementarnego przemieszczenia dr
jako:
dW = F
o
dr
Ponieważ praca siły F(x,y) nie zależy od drogi, a tylko od punktu startu i końca
przemieszczenia to można określić funkcję skalarną, zależną tylko od
współrzędnych (x,y). Nazywamy ją energią potencjalną i określamy jej
nieskończenie mały przyrost:
dU = - F
o
dr
Minus został wybrany ze względu na to, że ubytek energii potencjalnej jest
równy wykonanej elementarnej pracy.
21
Gradient energii potencjalnej
ENERGIA POTENCJALNA
5.XI.2011
Przyrost funkcji U(x,y) można wyrazić jako sumę przyrostów funkcji względem
obydwu zmiennych niezależnych x i y jako:
dy
y
U
dx
x
U
dU
∂
∂
+
∂
∂
=
Pochodne U względem x i y nazywają się pochodnymi cząstkowymi i liczymy
je tak, jakby druga zmienna była stałą przy liczeniu pochodnej cząstkowej po
pierwszej zmiennej.
Z drugiej strony:
Grupując wyrazy z odpowiednimi przyrostami dx i dy otrzymamy:
(
)
dy
y
U
dx
x
U
dy
F
dx
F
r
d
F
dU
y
x
∂
∂
+
∂
∂
=
⋅
+
⋅
−
=
−
=
r
o
r
0
dy
y
U
F
dx
x
U
F
y
x
=
∂
∂
+
+
∂
∂
+
22
Gradient energii potencjalnej
ENERGIA POTENCJALNA
5.XI.2011
W przestrzeni trójwymiarowej równanie to obowiązuje dla dowolnych przyrostów
dx, dy i dz stąd muszą znikać tożsamościowo wyrażenia w nawiasach:
Siła równa jest ujemnemu gradientowi energii potencjalnej:
z
∂
∂
−
=
∂
∂
−
=
∂
∂
−
=
U
F
y
U
F
x
U
F
z
y
x
∂
∂
+
∂
∂
+
∂
∂
−
=
∂
∂
∂
∂
∂
∂
−
=
∇
=
k
z
E
j
y
E
i
x
E
z
E
;
y
E
;
x
E
E
-
F
p
p
p
p
p
p
p
)
)
)
∫
−
=
kon
pocz
r
r
r
d
F
r
r
p
E
Stąd:
Grawitacyjna energia potencjalna
Energia potencjalna sprężystości
mgy
(y)
E
p
=
2
p
kx
2
1
(x)
E
=
23
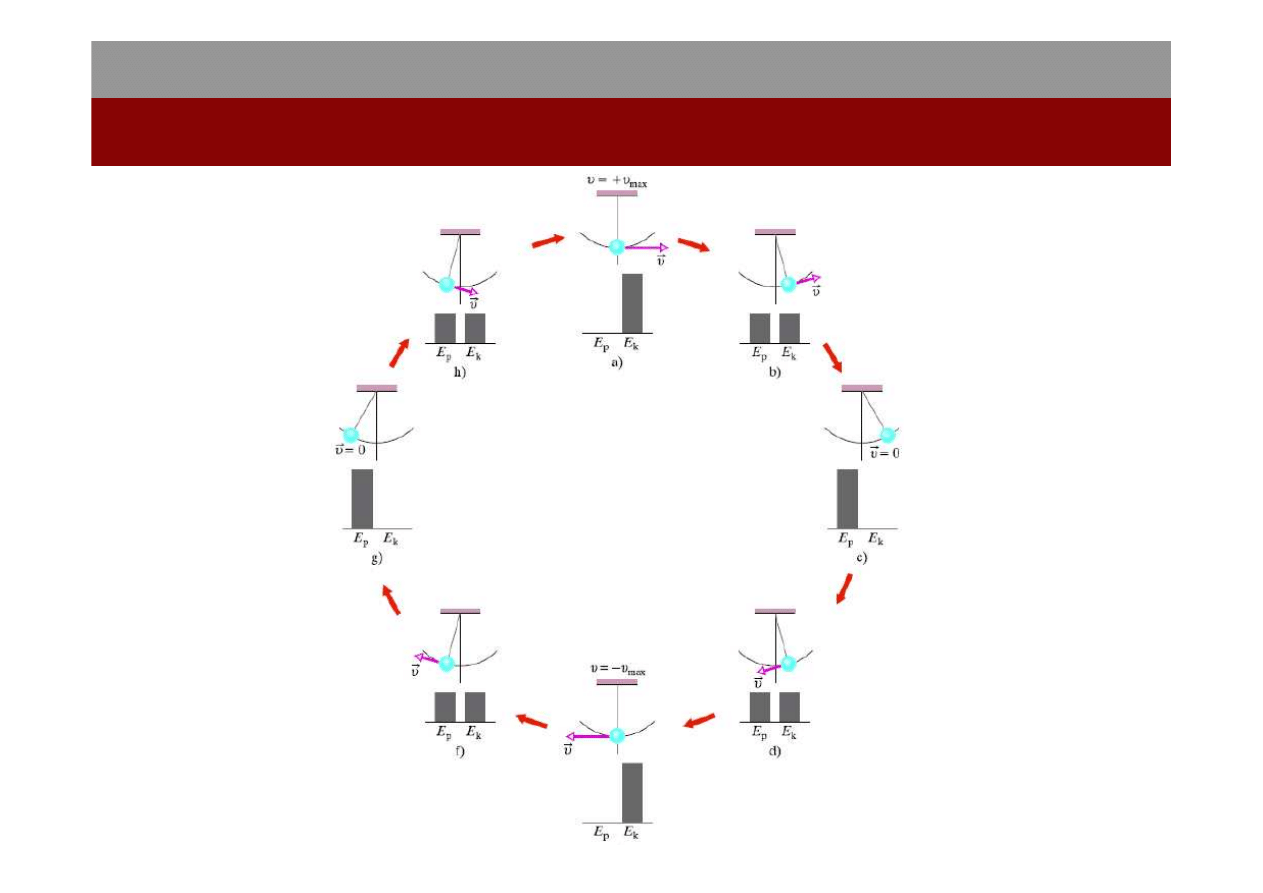
Zasada zachowania energii mechanicznej
Z.Z.E.
5.XI.2011
Energia mechaniczna E
mech
układu jest sumą jego energii potencjalnej E
p
oraz
energii kinetycznej E
k
wszystkich jego składników:
Gdy siła zachowawcza wykonuje pracę W w układzie izolowanym nad jednym
z ciał układu, zachodzi zamiana energii kinetycznej E
k
ciała w energię
potencjalną E
p
układu. Zmiana energii kinetycznej ∆E
k
jest równa:
Z drugiej strony wiadomo, że zmiana energii potencjalnej wynosi:
Stąd otrzymujemy, że
k
p
mech
E
E
E
+
=
W
∆
E
k
=
W
∆
E
p
−
=
p
k
∆
E
∆
E
−
=
24
Zasada zachowania energii mechanicznej
Z.Z.E.
5.XI.2011
przy czym wskaźniki 1 i 2 odnoszą się do dwóch różnych chwil, a zatem dwóch
różnych konfiguracji składników układu.
Przekształcając otrzymujemy zasadę zachowania energii mechanicznej:
p2
p1
k1
k2
p
k
E
E
E
E
∆
E
∆
E
−
=
−
−
=
p2
k2
p1
k1
E
E
E
E
+
=
+
SUMA E
k
i E
p
DLA
DOWOLNEGO STANU UKŁADU
SUMA E
k
i E
p
DLA
KAśDEGO INNEGO STANU UKŁADU
=
W układzie izolowanym, w którym zamiana energii pochodzi jedynie od sił
zachowawczych energia kinetyczna i energia potencjalna mogą się zmieniać, lecz
ich suma czyli energia mechaniczna E
mech
nie może ulegać zmianie.
25
Zasada zachowania energii mechanicznej
Z.Z.E.
5.XI.2011
26
Zasada zachowania energii
Z.Z.E.
5.XI.2011
• Zmiana całkowitej energii E układu jest równa energii dostarczonej do układu
lub od niego odebranej.
przy czyni ∆E
mech
jest dowolną zmianą energii mechanicznej układu. ∆E
term
—
dowolną zmianą jego energii termicznej, a ∆E
wewn
— dowolną zmianą innych
postaci jego energii wewnętrznej. Zmiana energii mechanicznej ∆E
mech
zawiera
w sobie zmianę energii kinetycznej ∆E
k
oraz zmianę energii potencjalnej ∆E
p
układu (sprężystości, grawitacyjnej lub jakiejkolwiek innej).
• Całkowita energia E układu izolowanego nie może się zmieniać.
wewn
term
mech
∆
E
∆
E
∆
E
∆
E
W
+
+
=
=
0
∆
E
∆
E
∆
E
wewn
term
mech
=
+
+
Wyszukiwarka
Podobne podstrony:
1 3 m4 L4 id 163274 Nieznany (2)
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
Misc3 id 302777 Nieznany
cw med 5 id 122239 Nieznany
D20031152Lj id 130579 Nieznany
więcej podobnych podstron