SI-1
Wydział Inżynierii Elektrycznej i Komputerowej
Katedra Maszyn Elektrycznych
Laboratorium Maszyn Elektrycznych
Ćwiczenie SI - Silniki indukcyjne
Badania wstępne
Do badań wstępnych zalicza się:
•
rozeznanie budowy i rodzaju uzwojeń badanego silnika,
•
badanie stanu izolacji za pomocą megaomomierza,
•
badanie ciągłości uzwojeń,
•
identyfikację zacisków tabliczki zaciskowej,
•
zaznajomienie się z danymi znamionowymi silnika.
Pomiar rezystancji izolacji
Przed przystąpieniem do pomiaru należy za pomocą omomierza dobrać parami zaciski
odpowiadające poszczególnym fazom oraz określić ewentualne przerwy w uzwojeniach.
Następnie megaomomierzem induktorowym o napięciu stałym przeprowadzić kolejno pomiar
rezystancji między poszczególnymi uzwojeniami oraz między uzwojeniami a korpusem.
Pozostałe uzwojenia powinny być w czasie pomiarów zwarte z masą. Rezystancja izolacji nie
może być mniejsza niż 1k
Ω
na 1V napięcia znamionowego. Odczytu dokonuje się po 15 i 60
sekundach od chwili przyłożenia napięcia. Iloraz R
60
/R
15
świadczy o stopniu zawilgocenia
uzwojeń. Dla suchej maszyny powinien być on większy od 1,5.
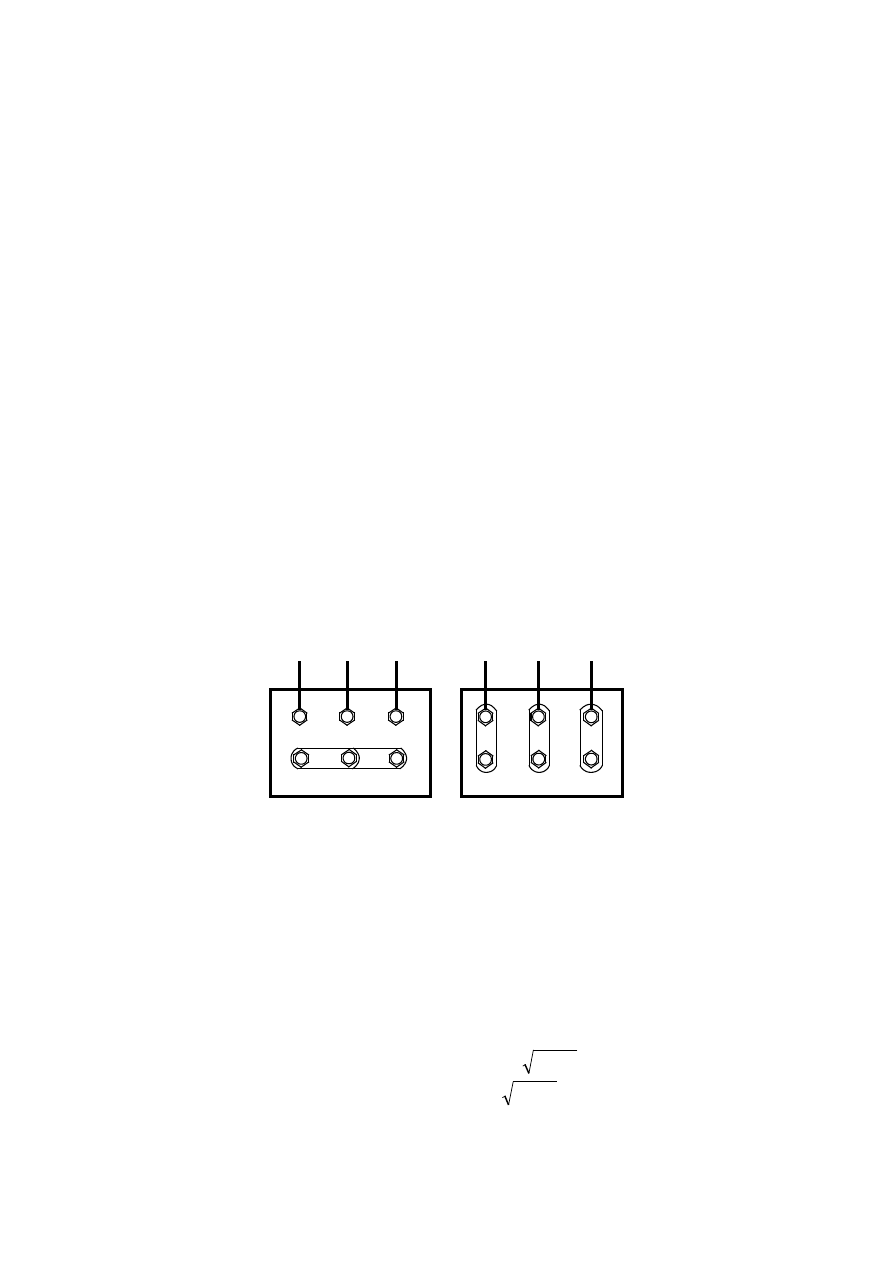
Identyfikacja zacisków na tabliczce zaciskowej
Trójfazowe uzwojenie stojana jest zwykle wyprowadzone na tabliczkę z sześcioma zaciskami,
umożliwiającą połączenie uzwojeń w gwiazdę lub trójkąt za pomocą blaszek zwierających.
Y
∆
1
U
2
U
1
V
2
V
1
W
2
W
2
W
2
U
2
V
1
U
1
V
1
W
1
L
1
L
2
L
2
L
3
L
3
L
Silnik indukcyjny pierścieniowy
1. Dane znamionowe badanego silnika
N
P = 3kW,
N
U = 220/380V (
∆/
Υ
),
N
I = 11.4/6.6A,
N
ϕ
cos
= 0.81,
N
n = 1420/min.
2. Pomiary rezystancji uzwojeń
Pomiaru rezystancji fazowych uzwojeń stojana
s
R i wirnika
r
R
przeprowadza się metodą
techniczną przy zasilaniu prądem stałym lub mostkiem technicznym. Należy zwrócić uwagę,
aby rezystancja uzwojonego wirnika była mierzona bezpośrednio na pierścieniach
ś
lizgowych.
W zależności od oczekiwanej wartości rezystancji pomiar wykonujemy:
•
metodą techniczną z łącznią napięciową, gdy
V
A
R
R
R
>
•
metodą techniczną z łącznią prądową, gdy
V
A
R
R
R
<
R
A
, R
V
– rezystancja wewnętrzna amperomierza i woltomierza.
W obu przypadkach prąd pomiarowy nie może przekroczyć 0,2I
N
, by nie nagrzać uzwojeń.
SI-2
•
mostkiem Wheatstone’a, gdy
Ω
>
1
R
•
mostkiem Thomsona, gdy
Ω
<
1
R
Zmierzoną w temperaturze
0
t wartość rezystancji
0
R przelicza się na temperaturę
t (75
0
C dla
izolacji uzwojeń klasy A, B, E lub 115
0
C dla uzwojeń z izolacją klasy F i H) według
zależności obowiązującej dla uzwojeń miedzianych:
0
0
235
235
t
t
R
R
t
+
+
=
.
Tu: zmierzona wartość rezystancji fazy uzwojenia stojana -
s
R =1.12
Ω
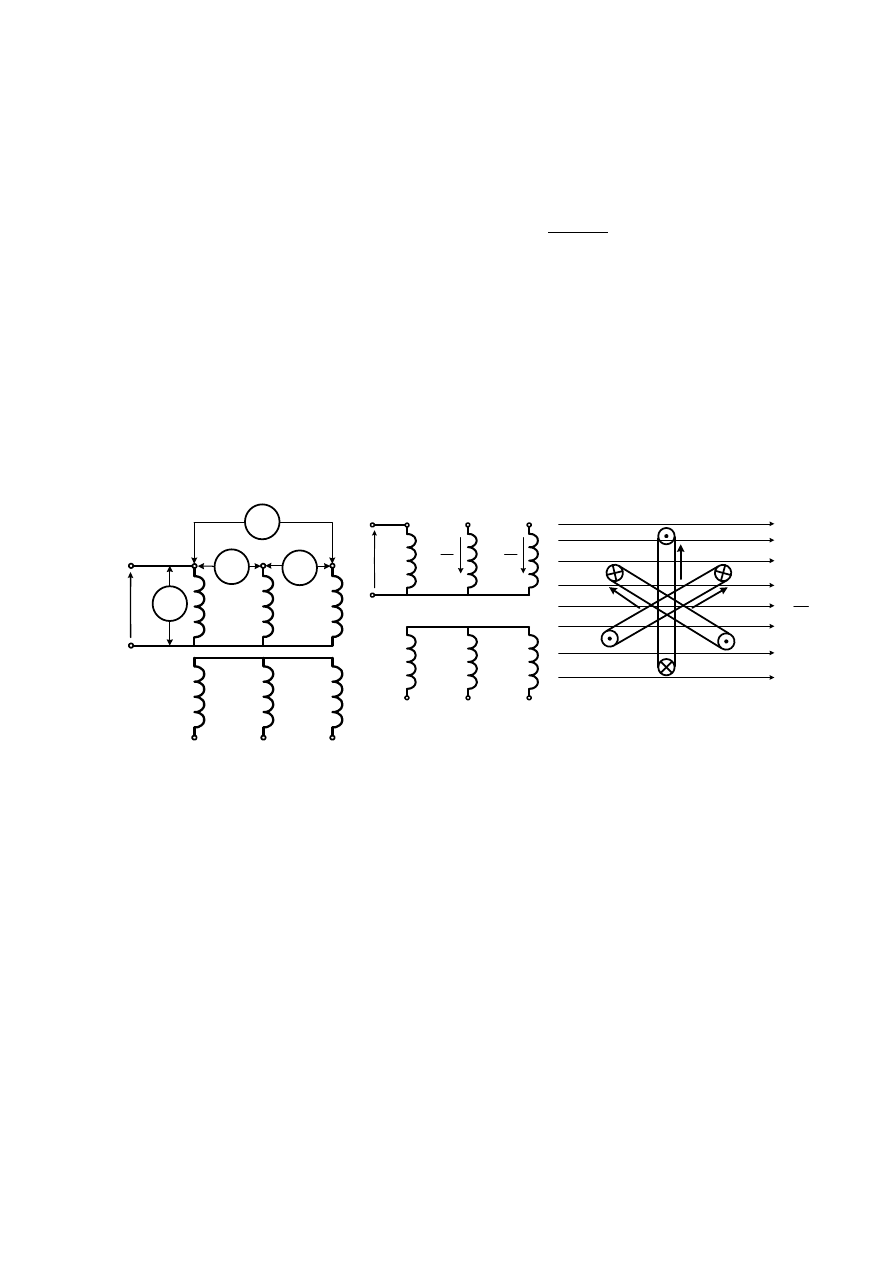
3. Wyznaczania początków i końców uzwojeń metodą woltomierzową
Uzwojenie wirnika jest na stałe połączone w gwiazdę i podczas pomiaru pozostaje rozwarte.
Łączymy ze sobą po jednym zacisku każdej fazy uzwojenia stojana i jedną z faz zasilamy
obniżonym napięciem przemiennym
1
U
(rysunek poniżej). Jeżeli każde z napięć
2
U
pomiędzy wolnym końcem fazy zasilanej i nie zasilanej będzie większe ok. 1,5 razy od
napięcia
1
U
, a wartość napięcia pomiędzy wolnymi końcami faz nie zasilanych
3
U wyniesie
0, to zwarte zostały zaciski jednoimienne faz (wszystkie początki lub końce faz uzwojenia).
W innym przypadku zostały zwarte zaciski różnoimienne.
V
V
V
V
1
U
2
U
2
U
3
U
2
U
2
U
U
1
U
1
V
1
W
2
U
2
V
2
W
1
U
1
V
1
W
2
U
2
V
2
W
2
/
U
2
/
U
U
2
Φ
Φ
Uzasadnienie metody pomiaru: Wytworzony przez zasilaną fazę zmienny strumień magne-
tyczny tylko w części równej
Φ
=
Φ
5
,
0
120
cos
0
sprzęga się z innymi fazami stojana, co
wynika z wzajemnego geometrycznego przesunięcia osi faz. Zgodnie z regułą Lenza napięcia
indukowane w nie zasilanych fazach mają przeciwny zwrot, niż w fazie zasilanej.
Metoda nie nadaje się do silnika klatkowego, gdyż wytworzone wtedy w zwartym uzwojeniu
wirnika prądy i strumienie zniekształca wartości napięć w fazach stojana.
4. Pomiar przekładni napięciowej silnika pierścieniowego
Pomiar przeprowadzamy przy połączeniu uzwojeń stojana i wirnika w gwiazdę i przy
rozwartym obwodzie nie zahamowanego wirnika. Dowolne dwie fazy stojana zasilamy z
regulatora indukcyjnego napięciem
s
U i kręcimy wałem wirnika, znajdując położenie, przy
którym woltomierz wpięty między dwie fazy wirnika pokaże największe napięcie
0
r
U (wtedy
osie faz uzwojeń pokryją się). Następnie, przy rozwartym uzwojeniu stojana, zasilamy te fazy
wirnika, napięciem
r
U
o wartości zbliżonej do
0
r
U (zmierzonej uprzednio) i obracając wirnik
wyznaczamy największą wartość napięcia
0
s
U - indukowanego między dwiema fazami
uzwojenia stojana. Mierzymy napięcia międzyfazowe, lecz ich stosunek jest taki sam jak
napięć fazowych, które z definicji wyznaczają przekładnię napięciową (ten sam układ
SI-3
połączeń obu uzwojeń). Wartość przekładni napięciowej (która odnosi się do relacji napięć
fazowych) wyznaczamy jako średnią arytmetyczną napięć przy zasilaniu stojana i wirnika ze
wzoru:
(
)
+
=
+
=
0
0
0
2
1
2
1
2
1
r
s
r
s
U
U
U
U
U
K
K
K
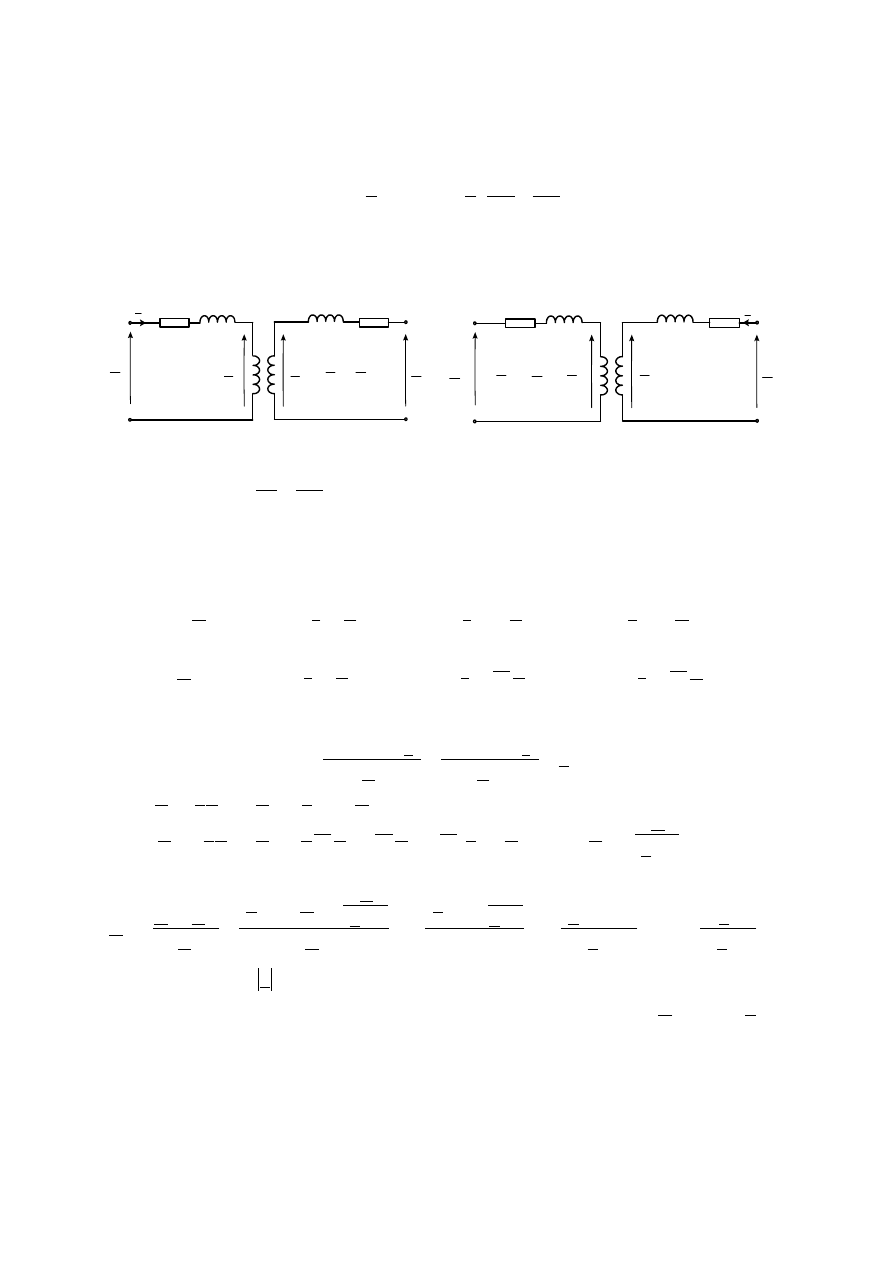
Uzasadnienie metody pomiaru, przy prowadzeniu analizy dla układu „faza stojana – faza
wirnika” na podstawie poniższych schematów zastępczych:
- dla
1
K
s
I
s
jX
σ
s
U
s
R
0
r
U
r
R
r
jX
σ
s
E
r
E
0
r
r
U
E
=
- dla
2
K
0
s
U
r
I
s
jX
σ
s
R
0
r
U
r
R
r
jX
σ
0
s
E
0
r
E
0
0
s
s
U
E
=
Rzeczywista przekładnia napięciowa K jest równa stosunkowi fazowych sił elektro-
motorycznych:
0
0
r
s
r
s
E
E
E
E
K
=
=
. W obu przypadkach pomiaru wyznaczamy przekładnię jako
stosunek napięcia fazy zasilanej do siły elektromotorycznej indukowanej w niezasilanej fazie
Napięcie zasilania jest wyższe niż siła elektromotoryczna w tej fazie o spadek napięcia na
rezystancji i reaktancji rozproszenia fazy.
W przypadku zasilania stojana:
0
)
(
)
(
)
(
r
s
s
s
r
s
s
s
s
s
s
s
s
U
K
I
jX
R
E
K
I
jX
R
E
I
jX
R
U
+
+
=
+
+
=
+
+
=
σ
σ
σ
W przypadku zasilania wirnika:
0
0
0
0
1
)
(
1
)
(
)
(
s
r
r
r
s
r
r
r
r
r
r
r
r
U
K
I
jX
R
E
K
I
jX
R
E
I
jX
R
U
+
+
=
+
+
=
+
+
=
σ
σ
σ
Dalej zakładamy równość względnych spadków napięcia na impedancjach gałęzi podłużnych,
(odniesionych do wartości sił elektromotorycznych):
δ
σ
σ
=
+
=
+
0
)
(
)
(
r
r
s
s
s
s
s
s
E
I
jX
R
E
I
jX
R
Stąd:
0
)
1
(
r
r
s
s
U
K
E
K
E
U
+
=
+
=
δ
δ
oraz
0
0
0
0
0
0
)
1
(
1
1
1
s
s
s
r
r
r
U
K
E
K
E
K
E
E
U
+
=
+
=
+
=
δ
δ
δ
i dalej
1
0
0
+
=
δ
r
s
U
K
U
Zatem zmierzona średnia wartość przekładni wyniesie:
)
)
1
(
2
1
(
)
1
(
2
1
)
1
(
2
1
1
)
1
(
2
1
)
1
(
2
2
2
0
0
0
0
0
+
+
=
+
+
+
=
+
+
+
=
+
+
+
=
+
=
δ
δ
δ
δ
δ
δ
δ
δ
K
K
K
U
U
K
U
K
U
U
U
K
r
r
r
r
s
s
U
Jeśli uwzględnić, że
1
<<
δ
można przyjąć tak wyznaczoną wartość przekładni napięciowej
za prawidłową -
K
K
U
=
(dla pojedynczego pomiaru przekładnia wyniesie:
)
1
(
δ
+
=
K
K
U
).
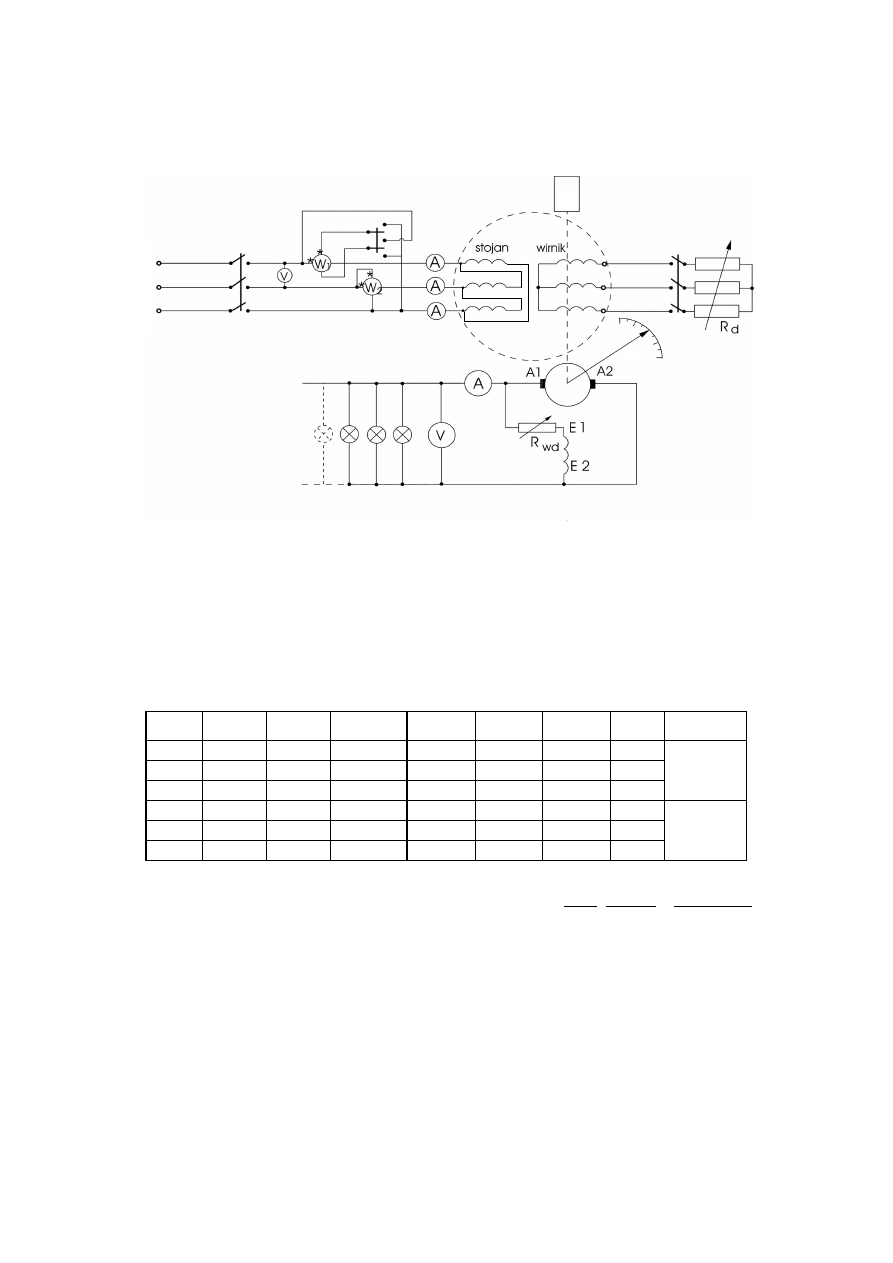
5. Pomiary biegu jałowego
Łączymy układ według poniższego schematu, przy zamkniętym wyłączniku W (zwarte
pierścienie ślizgowe). Wykonujemy rozruch napięciowy nieobciążonego silnika. Uzwojenie
wirnika jest zwarte na pierścieniach, a silnik nie jest obciążony momentem zewnętrznym,
Wirnik obraca się z prędkością bliską synchronicznej -
0
≈
s
, wytwarzając moment
równoważący moment strat mechanicznych.
SI-4
V
W
W
A
Regulator indukcyjny
Stojan
Wirnik
W
L1
L2
L3
s
U
1
P
2
P
∗
∗
∗
∗
Schemat układu pomiarowego do badania biegu jałowego i zwarcia silnika
Pomiary przeprowadzamy obniżając napięcie stojana od
sN
U
05
,
1
do wartości, przy której
zacznie wyraźnie maleć prędkość obrotowa (ok.
sN
U
3
,
0
). W stanie pracy jałowej
współczynnik mocy silnika jest niewielki (
0
60
>
ϕ
), stąd jeden z watomierzy w układzie
Arona wychyla się w stronę przeciwną.
Przed pomiarem należy zatem przełączyć jego
cewkę prądową i przy sumowaniu mocy uwzględnić ujemny znak mocy wskazywanej przez
watomierz.
Wyniki pomiarów zapisujemy w tabeli:
s
U
[V]
0
s
I
[A]
1
P
[W]
2
P
[W]
2
1
0
P
P
P
+
=
[W]
0
ϕ
cos
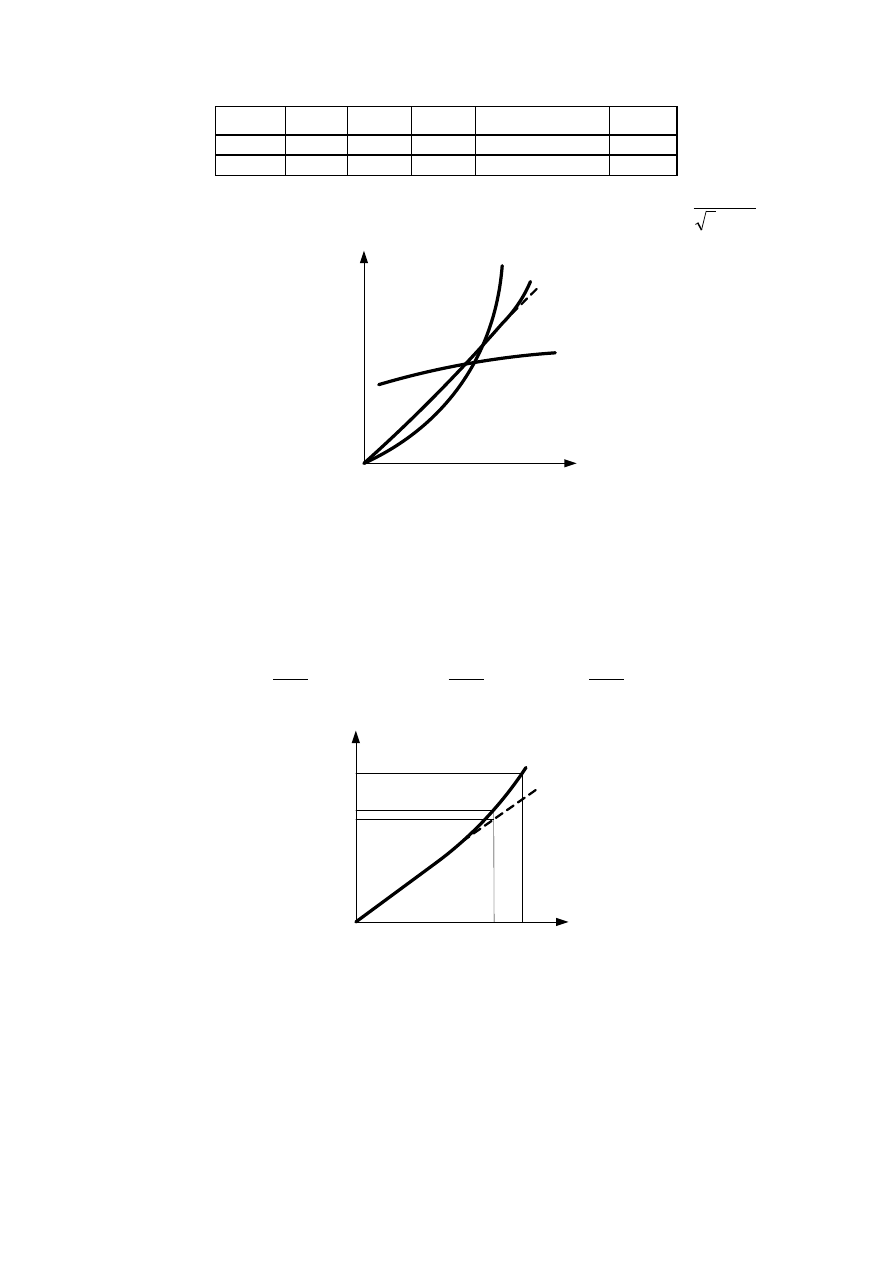
Wyniki pomiarów są podstawą do wykreślenia charakterystyk biegu jałowego
)
(
cos
,
,
s
s
U
f
P
I
=
0
0
0
ϕ
, gdzie:
0
0
0
3
s
s
I
U
P
=
ϕ
cos
.
0
P
0
s
I
0
cos
ϕ
sN
U
0
s
U
0
P
0
s
I
0
cos
ϕ
Charakterystyki biegu jałowego.
6. Pomiary stanu zwarcia
Łączymy układ według schematu jak w punkcie5, przy zamkniętym wyłączniku W i
zahamowanym wirniku (blokada mechaniczna wału) -
1
=
s
. Przed pomiarem nagrzewamy
silnik prądem znamionowym, a w celu utrzymania ustalonej temperatury uzwojeń
rozpoczynamy pomiary od zasilenia stojana napięciem, przy którym zwarciowy prąd stojana
jest równy
sN
sk
I
I
1
,
1
=
. Następnie dokonujemy odczytów, przy napięciu zasilania
zmniejszanym do ok.
N
U
3
,
0
.
Wyniki pomiarów zapisujemy w tabeli:
SI-5
s
U
[V]
sk
I
[A]
1
P
[W]
2
P
[W]
2
1
P
P
P
k
+
=
[W]
k
ϕ
cos
Należy wykreślić charakterystyki zwarcia
)
(
cos
,
,
s
k
k
sk
U
f
P
I
=
ϕ
, gdzie:
sk
s
k
k
I
U
P
3
=
ϕ
cos
.
k
P
k
ϕ
cos
sk
U
sk
I
k
ϕ
cos
sk
I
k
P
Charakterystyki zwarcia
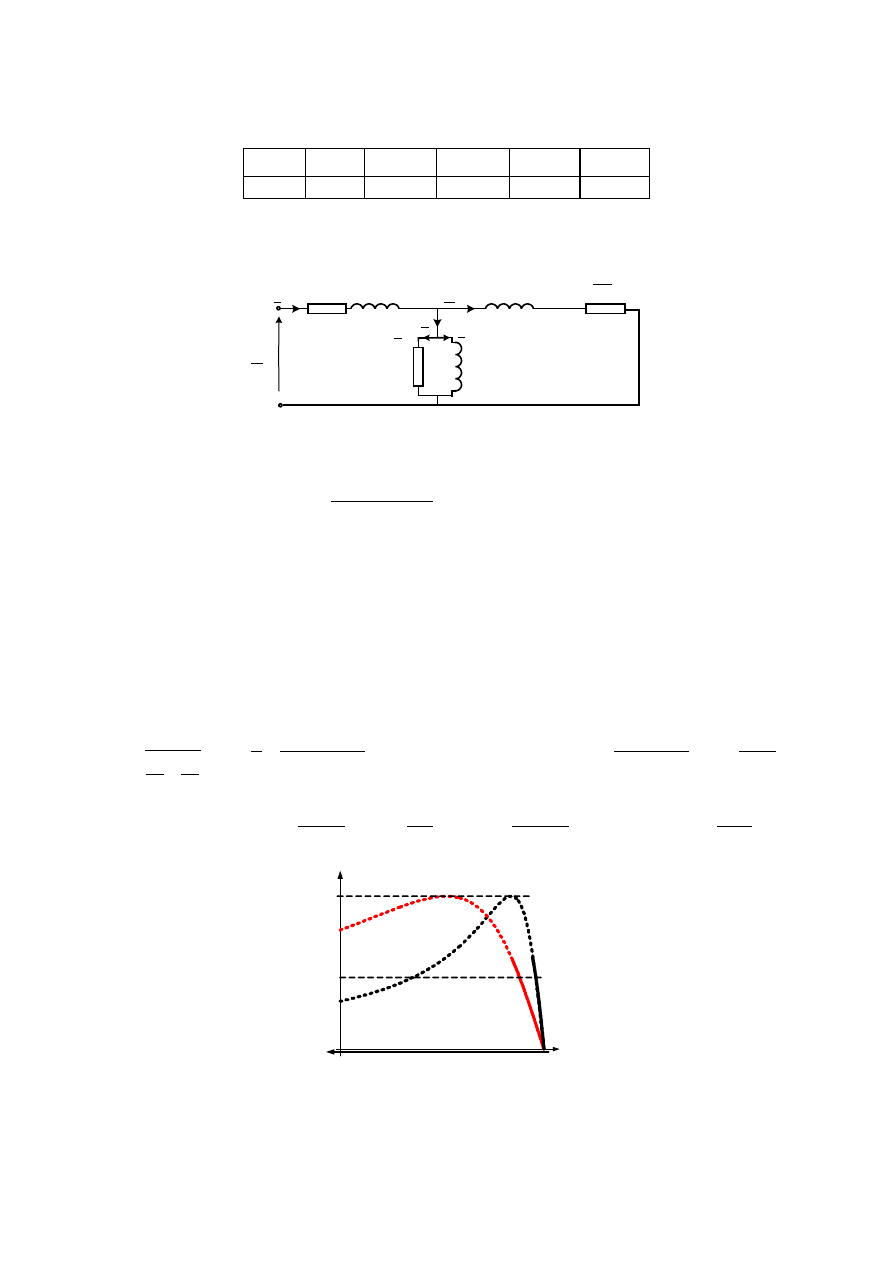
Następnie wyznacza się wartości prądu stojana
skN
I
oraz mocy zwarciowej
kN
P dla napięcia
znamionowego stojana -
sN
s
U
U
=
, korzystając z poniższych uwag. Prąd zwarcia rośnie
początkowo liniowo z napięciem, a w miarę nasycania się obwodu magnetycznego strumieni
rozproszenia reaktancje
s
X
σ
i
r
X
σ
′
maleją, co pociąga za sobą szybszy wzrost prądu. Z tego
powodu rośnie współczynnik mocy silnika w stanie zwarcia
k
ϕ
cos
. Wartości
skN
I
i
kN
P
przybliżają poniższe wzory:
5
.
1
0
1
0
)
(
⋅
−
+
⋅
≅
skN
sN
k
k
sN
skN
k
skN
U
U
I
I
U
U
I
I
,
k
skN
sN
kN
P
U
U
P
⋅
=
2
s
U
sk
I
0
k
I
1
k
I
skN
U
sN
U
skN
I
Charakterystyka
)
(
s
sk
U
f
I
=
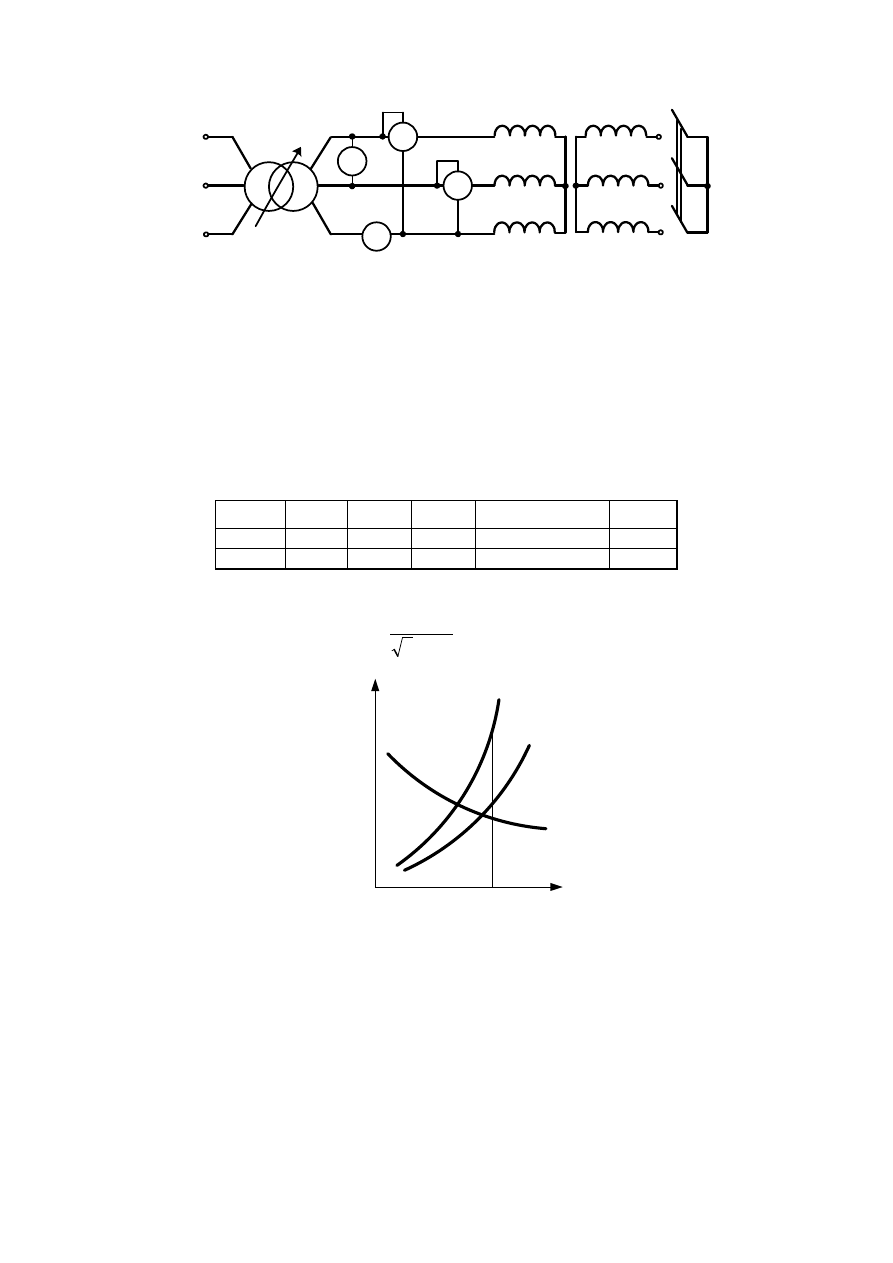
7. Pomiary przy obciążeniu
W ćwiczeniu wykonuje się rozruch oporowy silnika indukcyjnego za pomocą zwieranego
rozrusznika, przy połączeniu uzwojenia stojana w trójkąt i zasileniu stojana napięciem
znamionowym
sN
U
. Następnie poprzez zmianę prądu wzbudzenia sprzężonej z badanym
silnikiem prądnicy obcowzbudnej prądu stałego zmienia się obciążenie i odczytuje: moc
pobraną z sieci P , prąd przewodowy stojana
s
I , moment obciążenia T , obroty silnika
n
,
SI-6
napięcie
L
U
i prąd obciążenia prądnicy grzałkami -
L
I
. Moment rozwijany przez silnik jest
proporcjonalny do nacisku na wagę elektroniczną łap ruchomego stojana prądnicy.
n
T
U
V
W
Schemat układu pomiarowego do badania silnika indukcyjnego pierścieniowego
Pomiar wykonujemy dla dwóch przypadków: przy zwartych pierścieniach wirnika i przy
dołączonych do wirnika dodatkowych rezystancjach o wartości fazowej -
d
R , w zakresie
prądu stojana od prądu biegu jałowego do wartości
sN
I
2
1.
. Aby uniknąć obliczeń związanych
z przeliczaniem wyników na temperaturę pracy, pomiary należy wykonać na maszynie
nagrzanej.
Wyniki pomiarów zapisujemy w tabeli:
s
I
[A]
1
P
[W]
2
P
[W]
n
[min
-1
]
T
[Nm]
L
U
[V]
L
I
[A]
η
0
=
d
R
[
Ω
/fazę]
=
d
R
0.58
[
Ω
/fazę]
Sprawność wyznaczona metodą bezpośrednią jest równa:
2
1
2
1
105
0
30
P
P
n
T
P
P
T
n
+
⋅
⋅
=
+
⋅
⋅
=
,
π
η
Na podstawie pomiarów należy wykreślić charakterystyki mechaniczne i zewnętrzne
)
(
,
n
f
I
T
s
=
dla
0
=
d
R
i
0
≠
d
R
.
Opracowanie sprawozdania:
W sprawozdaniu powinny być zawarte:
-
dane znamionowe badanego silnika,
-
opis kolejnych pomiarów, schematy układów pomiarowych,
-
wyniki pomiarów w postaci tabel i wykresów,
-
obliczenia parametrów schematu zastępczego silnika i narysowanie schematu
zastępczego,
SI-7
-
wyznaczone straty poszczególne mocy, niezbędne do wyznaczenia sprawności metodą
strat poszczególnych i obliczenie sprawności znamionowej,
-
obliczenia teoretyczne charakterystyki momentu w funkcji obrotów, porównane we
wspólnym zakresie poślizgów z wynikami pomiarów,
-
wnioski
Pomocne procedury, schematy i wzory:
Wyznaczanie parametrów fazowego schematu zastępczego
•
Obliczenia w stanie jałowym:
Moc czynna
0
P (zmierzona jako suma algebraiczna wskazań watomierzy w układzie Arona -
2
1
0
P
P
P
+
=
) pobierana w czasie biegu jałowego jest sumą strat mocy w żelazie stojana
Fe
P
∆
,
strat mechanicznych
m
P
∆
i niewielkich strat w uzwojeniu stojana
ws
P
∆
:
ws
m
Fe
P
P
P
P
∆
+
∆
+
∆
=
0
, gdzie:
2
0
0
3
sph
s
ws
I
R
P
=
∆
.
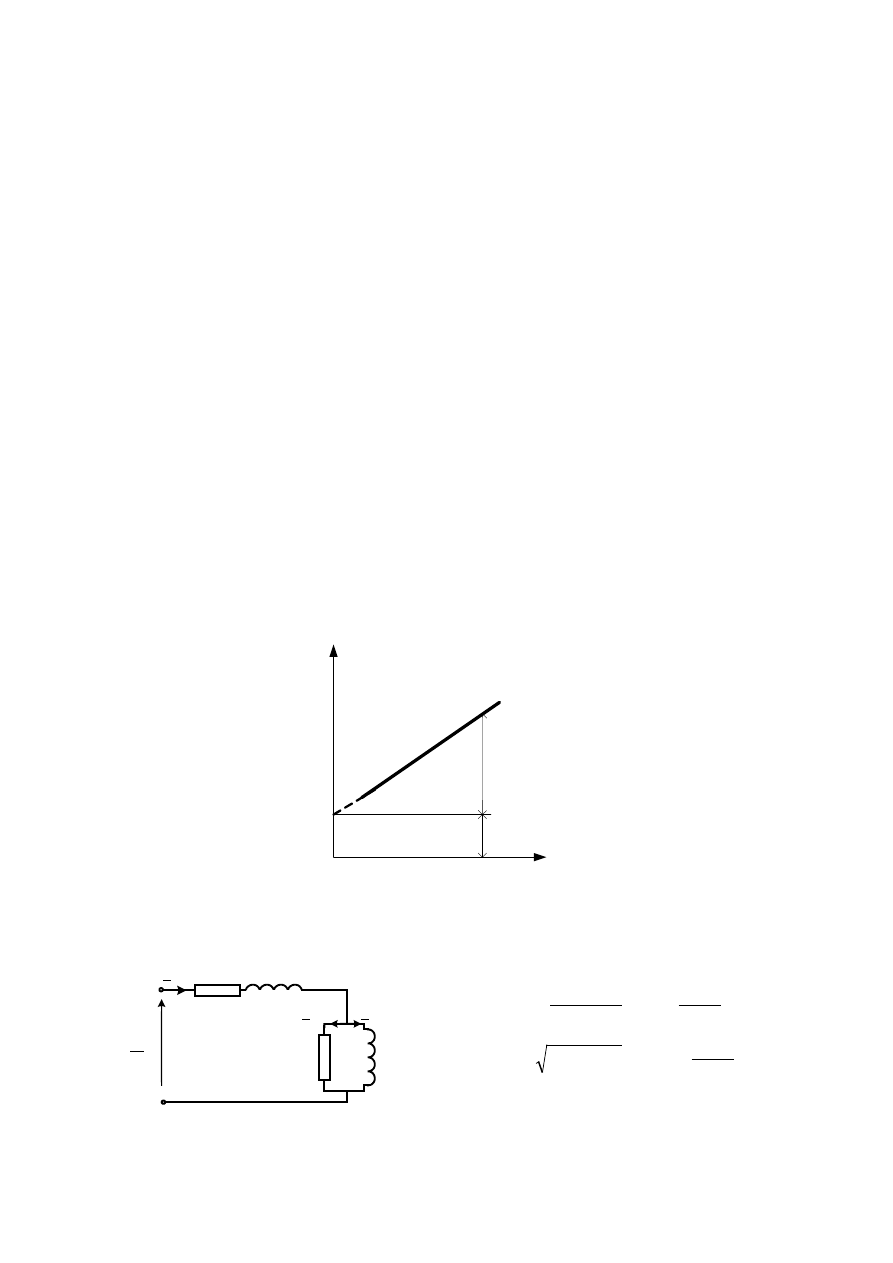
Rozdział strat w rdzeniu
Fe
P
∆
i strat mechanicznych
m
P
∆
, przy biegu jałowym silnika
przeprowadza się metodą graficzną dla znamionowego napięcia zasilania stojana. Ponieważ w
trakcie pomiaru biegu jałowego obroty silnika są praktycznie stałe, straty mechaniczne też
mają stałą wartość i nie zależą od zmiany napięcia zasilania. Straty w rdzeniu, głównie
stojana (z racji niewielkiej wartości poślizgu), zależą od kwadratu napięcia zasilania.
Rysując zależność zmian sumy obu strat względem kwadratu napięcia:
( )
2
0
0
0
0
U
f
P
P
P
P
P
m
Fe
ws
=
∆
+
∆
=
∆
−
=
∆
otrzymuje się w przybliżeniu linię prostą.
Punkt przecięcia tej prostej z osią rzędnych wyznacza wartość strat mechanicznych silnika
m
P
∆
. Straty mechaniczne zwykle przyjmuje się jako równe (0,6
÷
1,5)%
N
P
2
s
U
m
Fe
P
P
P
∆
+
∆
=
∆
0
m
P
∆
Fe
P
∆
sN
U
Wyznaczenie
Fe
P
∆
i
m
P
∆
Parametry gałęzi poprzecznej schematu zastępczego wyznaczamy ze wzorów:
0
sph
I
s
R
s
jX
σ
sph
U
Fe
R
m
jX
Fe
I
m
I
Fe
sphN
Fe
P
U
R
∆
=
2
)
(
3
;
Fe
sphN
Fe
R
U
I
=
;
2
2
0
Fe
sph
m
I
I
I
−
=
;
m
sphN
m
I
U
X
=
SI-8
Znajomość przekładni napięciowej K i napięcia fazowego
0
rph
U
indukowanego w uzwojeniu
wirnika w stanie pracy transformatorowej, przy zasilaniu stojana napięciem znamionowym
sphN
U
, umożliwia dokładniejsze wyznaczenie parametrów gałęzi poprzecznej schematu.
Wtedy na wyniki nie ma wpływu spadek napięcia na rezystancji i reaktancji rozproszenia
uzwojenia stojana.
(
)
Fe
rph
Fe
P
K
U
R
∆
⋅
=
2
0
3
,
Fe
rph
Fe
R
K
U
I
⋅
=
0
,
2
2
0
Fe
sph
m
I
I
I
−
=
,
m
rph
m
I
K
U
X
⋅
=
0
.
•
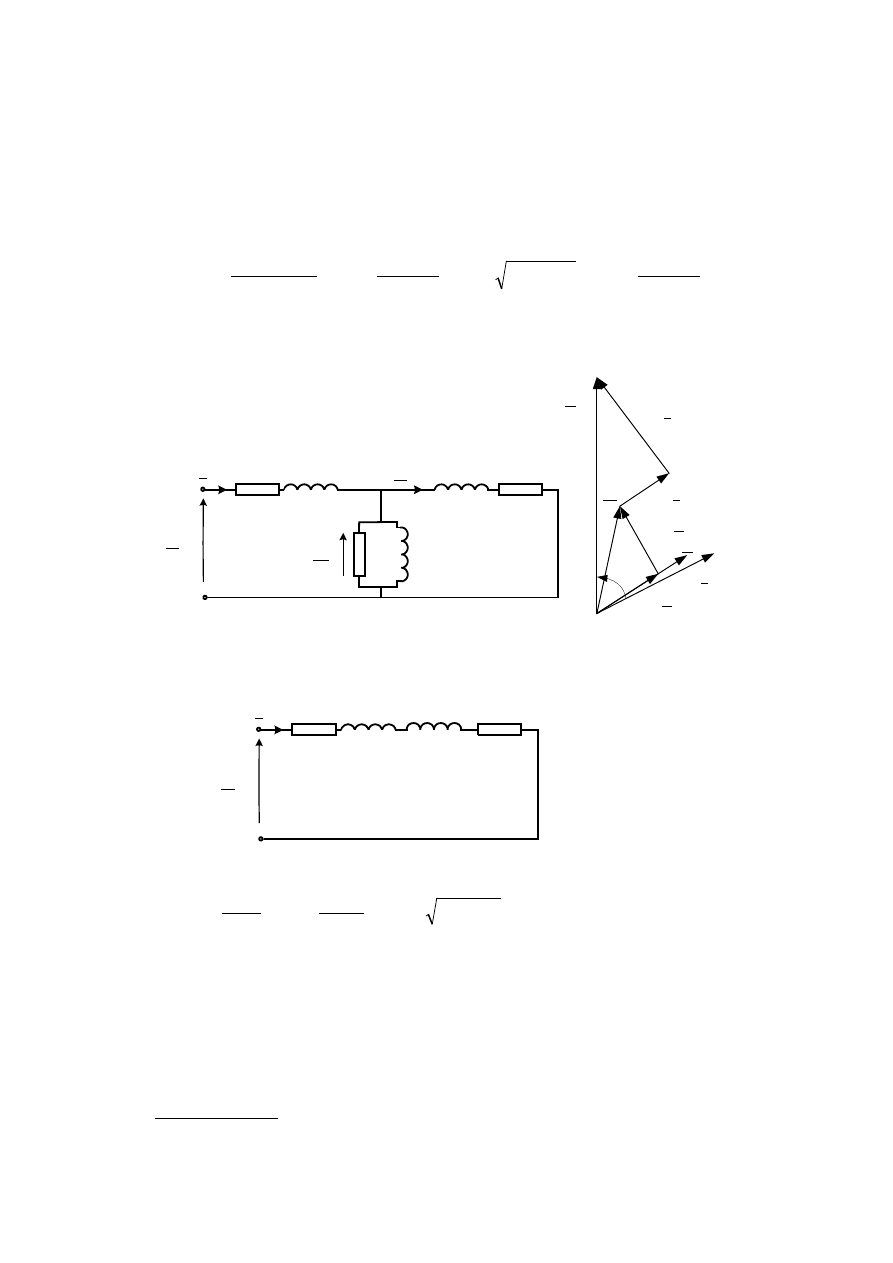
Obliczenia w stanie zwarcia
Poniżej przedstawiono schemat zastępczy i wykres wskazowy dla stanu zwarcia silnika.
sphk
I
s
R
s
jX
σ
r
X
j
σ
′
rphk
I
′
r
R
′
sphk
U
Fe
R
m
jX
0
r
E
′
0
r
E
′
sphk
I
rphk
r
I
R
′
′
rphk
I
′
sphk
s
I
jX
σ
sphk
s
I
R
rphk
r
I
X
j
′
′
0
σ
sphk
U
k
ϕ
W obliczeniach przybliżonych dla stanu zwarcia silnika pierścieniowego można pominąć
gałąź poprzeczną schematu zastępczego maszyny, z uwagi na relatywnie znaczną wartość jej
impedancji, w porównaniu z impedancją gałęzi podłużnej.
sphk
I
s
R
s
jX
σ
r
X
j
σ
′
r
R
′
sphk
U
Parametry wyznaczamy dla prądu zwarcia równego prądowi znamionowego stojana.
sphN
sphk
k
I
U
Z
=
,
2
3
sphN
k
k
I
P
R
=
,
2
2
k
k
k
R
Z
X
−
=
,
2
K
R
R
R
R
R
r
s
r
s
k
⋅
+
=
′
+
=
Rzeczywistą wartość rezystancji fazowej wirnika można oszacować jako:
2
/
)
(
K
R
R
R
s
k
r
−
=
.
Na podstawie pomiaru biegu jałowego i zwarcia, przy znajomości napięcia indukowanego w
wirniku przy pomiarze przekładni napięciowej (stan pracy transformatorowej silnika) można
oszacować reaktancje rozproszeń stojana i wirnika:
0
0
sph
rph
sphN
s
I
U
K
U
X
⋅
−
=
σ
- jeśli przyjąć, że
s
s
R
X
>>
σ
oraz
s
k
r
r
X
X
K
X
X
σ
σ
σ
−
=
⋅
=
′
2
.
SI-9
Parametry fazowego schematu zastępczego zapisujemy w tabeli:
s
R
[
Ω
]
r
R
′
[
Ω
]
s
X
σ
[
Ω
]
r
X
σ
′
[
Ω
]
Fe
R [
Ω
]
m
X [
Ω
]
W sprawozdaniu należy zamieścić układ zastępczy silnika z wartościami poszczególnych
parametrów.
sph
I
s
R
s
jX
σ
r
X
j
σ
′
rph
I
′
s
R
r
′
sph
U
Fe
R
m
jX
0
I
Fe
I
m
I
Wyznaczanie sprawności znamionowej metodą strat poszczególnych
pN
N
pN
N
P
P
P
∑
∆
−
=
η
,
N
sphN
sphN
pN
I
U
P
ϕ
cos
3
=
,
∑
∆
+
∆
+
∆
+
∆
+
∆
=
∆
dod
m
wrN
Fe
wsN
N
P
P
P
P
P
P
,
2
3
sphN
s
wsN
I
R
P
=
∆
,
(
)
s
P
P
P
P
Fe
wsN
pN
wrN
⋅
∆
−
∆
−
=
∆
,
N
dod
P
P
⋅
=
∆
%
5
,
0
.
Wyznaczanie teoretycznej charakterystyki mechanicznej silnika (wzór Klossa)
Obliczyć charakterystyki momentu w funkcji poślizgu s od 0 do 1 i wrysować na nią
charakterystyki zmierzone przy braku i przy obecności w obwodzie wirnika dodatkowej
rezystancji. Przyjąć do wzorów parametry wyznaczonego schematu zastępczego silnika.
s
s
s
s
T
T
b
b
b
+
=
2
,
k
sphN
S
b
X
U
C
p
T
0
2
)
(
2
3
ω
=
,
2
=
p
,
π
π
ω
100
2
0
=
=
s
f
,
m
s
m
S
X
X
X
C
+
=
σ
,
p
f
n
s
60
0
=
r
s
s
k
X
X
C
X
σ
σ
′
+
=
,
0
0
n
n
n
s
−
=
,
k
r
b
X
R
s
′
=
albo
k
d
r
b
X
R
R
s
′
+
′
=
,
d
d
R
K
R
2
=
′
,
30
n
⋅
=
Ω
π
0
=
d
R
0
>
d
R
0
1
b
T
s
0
n
s
n
N
T
T
Przebieg teoretyczny charakterystyki mechanicznej silnika indukcyjnego przy zmianie
rezystancji w wirniku, z zaznaczeniem zakresu odpowiadającego wykonanym pomiarom
SI-10
Silnik indukcyjny klatkowy
Wyznaczanie początków i końców uzwojeń stojana
Przeprowadza się w przypadku nie oznaczonej tabliczki zaciskowej jedną z poniższych
metod:
1. Metoda impulsów prądu stałego
Przed przystąpieniem do pomiaru należy za pomocą omomierza dobrać parami zaciski
odpowiadające poszczególnym fazom. Łączymy układ według poniższego schematu.
1
U
1
V
1
W
2
U
2
V
2
W
Φ
V
+
+
−
−
Początek i koniec jednej z faz przyjmuje się dowolnie, a następnie zasila się tą fazę
niewielkim napięciem stałym, uzyskanym np. z prostownika jednofazowego zasilanego z
autotransformatora. Do innej fazy uzwojenia stojana przyłącza się woltomierz
i obserwuje się jego wychylenie przy załączaniu napięcia. Jeżeli ujemny biegun źródła został
przyłączony do zacisku przyjętego za początek danej fazy a dodatni do końca tej fazy, to przy
impulsowym załączeniu napięcia plus woltomierza wskazuje na początek drugiej fazy, jeśli
woltomierz wychyla się prawidłowo.
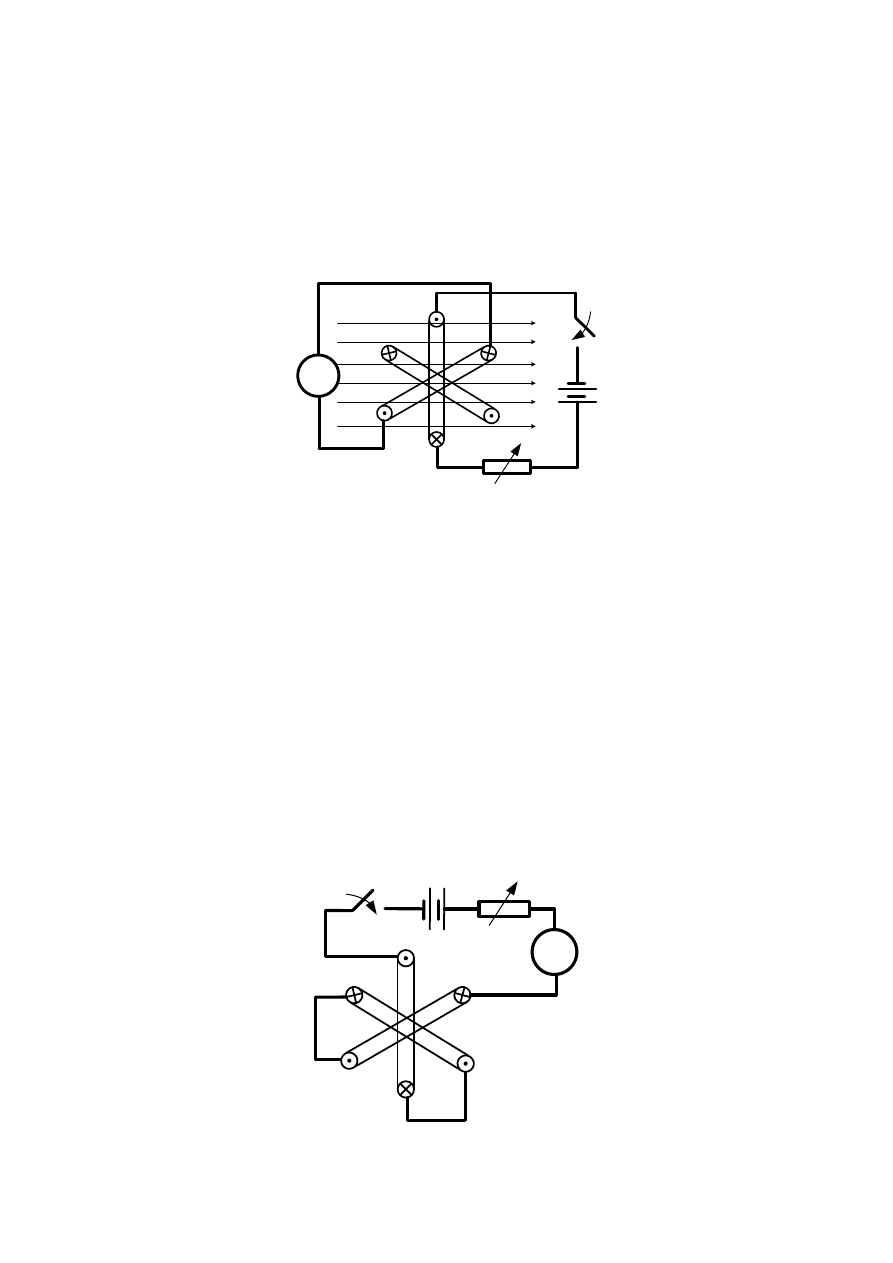
2. Metoda zasilania prądem stałym
Uzwojenie trójfazowe łączy się szeregowo i zasila prądem stałym. Jeżeli kierunek płynięcia
prądu we wszystkich uzwojeniach jest jednakowy (od początku do końca lub odwrotnie), to
wypadkowy strumień w maszynie, będący sumą trzech strumieni przesuniętych w przestrzeni
co 120
0
, jest bliski zeru. Obracając zwarty wirnik, nie odczuwa się wtedy oporu, gdyż w
klatce nie indukują się prądy i nie wytworzą momentu hamującego. Gdy jedno z uzwojeń
połączymy przeciwnie (np. zacisk
2
U z zaciskiem 2
V i dalej zacisk 1
V z zaciskiem
1
W ), to
wypadkowy strumień będzie różny od zera. Przy obracaniu wirnika prądy indukowane w
klatce wytworzą wyczuwalny ręką moment hamujący.
+
−
1
U
1
V
1
W
2
U
2
V
2
W
A
SI-11
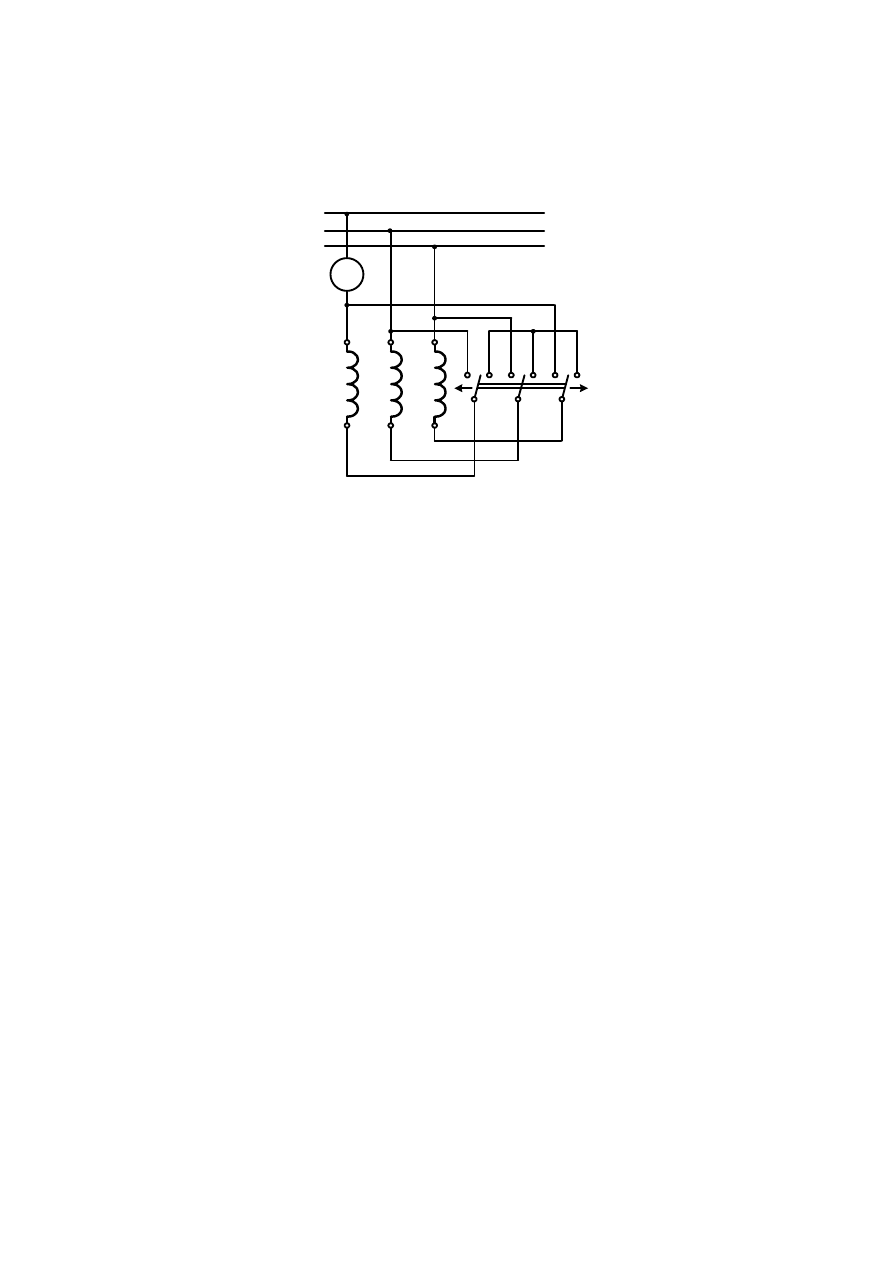
Rozruch silnika za pomocą przełącznika „gwiazda – trójkąt”
Po wyznaczeniu początków i końców faz uzwojenia stojana, łączymy je zgodnie z poniższym
schematem.
A
1
L
2
L
3
L
∆
Y
1
U
1
V
1
W
2
U
2
V
2
W
Wykonując rozruch nieobciążonego silnika z użyciem przełącznika „gwiazda – trójkąt”
obserwujemy na amperomierzu zmiany prądu przewodowego stojana i pracę silnika, w obu
pozycjach przełącznika.
W sprawozdaniu należy przedstawić: schematy układów pomiarowych, opis stosowanych
metod pomiarowych i przeprowadzonych badań, objaśnienie przyczyn obserwowanych
zjawisk.
Literatura podstawowa:
1. J.K. Markielowski i in.: Laboratorium maszyn elektrycznych, PK, Kraków 1982
2. J. Skwarczyński i in.: Laboratoryjne pomiary maszyn elektrycznych, AGH, Kraków 1985.
Opracował: dr inż. Konrad Weinreb
Kraków, grudzień 2010
Wyszukiwarka
Podobne podstrony:
11 Silnik indukcyjny pierścieniowy SUHf, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
Badanie silnika indukcyjnego je Nieznany
Badanie silnika indukcyjnego A4 Nieznany (2)
3-fazowego silnika indukcyjnego pierścieniowego, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elek
Badanie silnika indukcyjnego - l, Polibuda, IV semestr, SEM IV, Maszyny Elektryczne. Laboratorium, 0
11 Silnik indukcyjny pierścieniowy SUHf, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
A3 Silnik indukcyjny pierscieniowy program
5 2 3a CCNA1 Laboratorium pl id Nieznany (2)
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
Badanie silnika indukcyjnego jednofazowego
silnik indukcyjny piercieniowy
Laboratorium metod numerycznych Nieznany
LABORATORIUM 1 id 261484 Nieznany
zestaw 14 silniki i chlodziarki Nieznany
Laboratorium nr 5 wskaYniki Nieznany
instrukcja laboratoryjna id 216 Nieznany
więcej podobnych podstron