
Podstawy Konstrukcji Urządzeń Precyzyjnych
Zespół napędu liniowego
Algorytm obliczeń wstępnych
Preskrypt:
Opracował dr inż. Wiesław Mościcki
Warszawa 2010
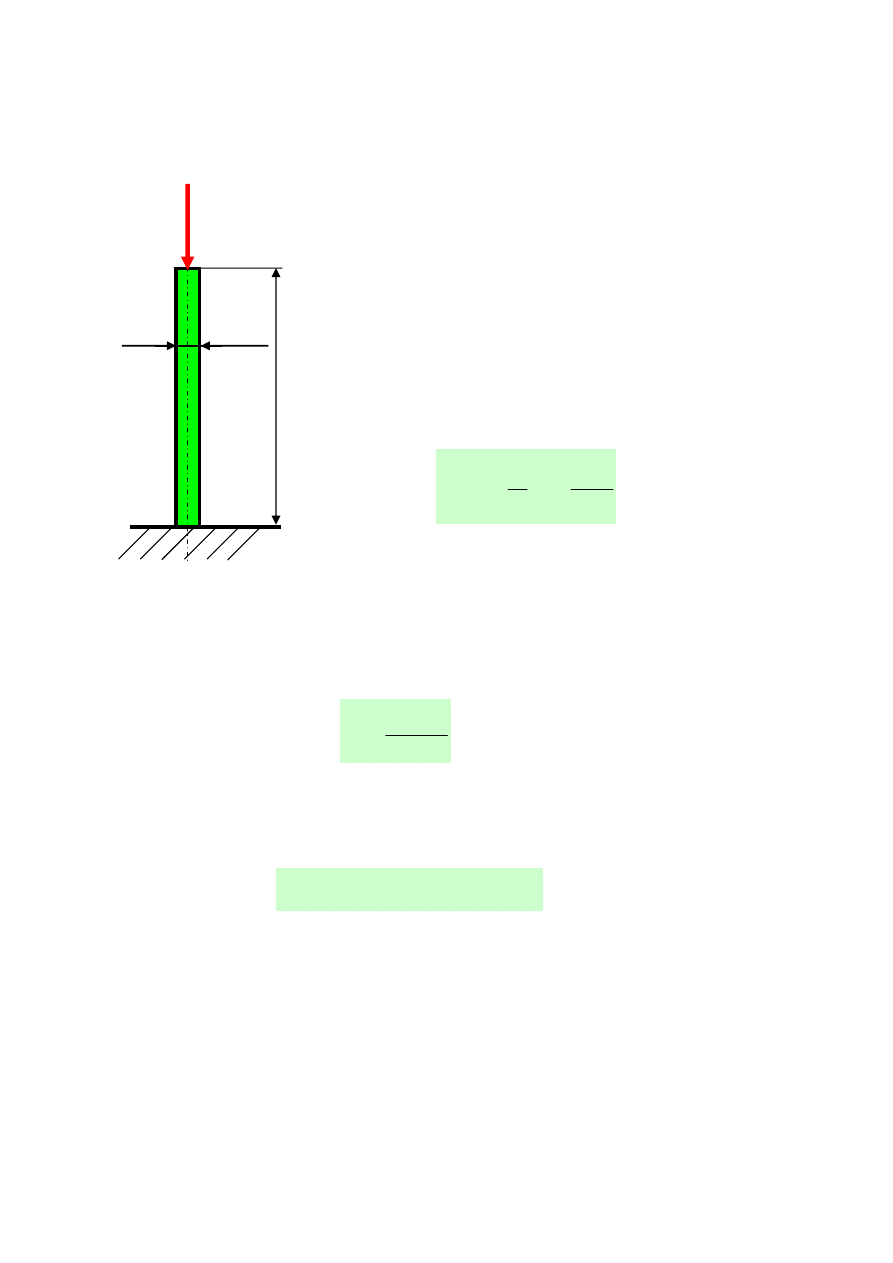
1. Dobór średnicy popychacza
a) Obliczenie śruby na wyboczenie
F
max
Musi być spełniony warunek:
F
max
≤
F
kr
(1)
d
r
F
kr
- siła krytyczna,
powodująca wyboczenie
L śruby - popychacza
2
2
kr
L
J
E
F
⋅
⋅
⎟
⎠
⎞
⎜
⎝
⎛
=
β
π
(2)
E - moduł sprężystości materiału śruby, dla stali, E = 2,1
⋅
10
5
MPa,
J - moment bezwładności przekroju poprzecznego śruby,
β
- współczynnik zależny od sposobu zamocowania pręta,
L – długość popychacza pracująca na wyboczenie
64
d
J
4
r
⋅
=
π
(3)
d
r
- średnica rdzenia śruby, (d
3
)
Całkowita długość popychacza to:
max
z
d
c
L
L
L
L
+
+
=
(4)
L
d
– długość popychacza, od jego wyjścia z nakrętki do czoła, w skrajnym
położeniu, gdy jest najmniej wysunięty, w projekcie przyjąć L
d
= 20
÷
40 mm,
L
max
– zakres ruchu wg tematu,
L
z
– długość ześrubowania, L
z
> min.(3
÷
4)d
r
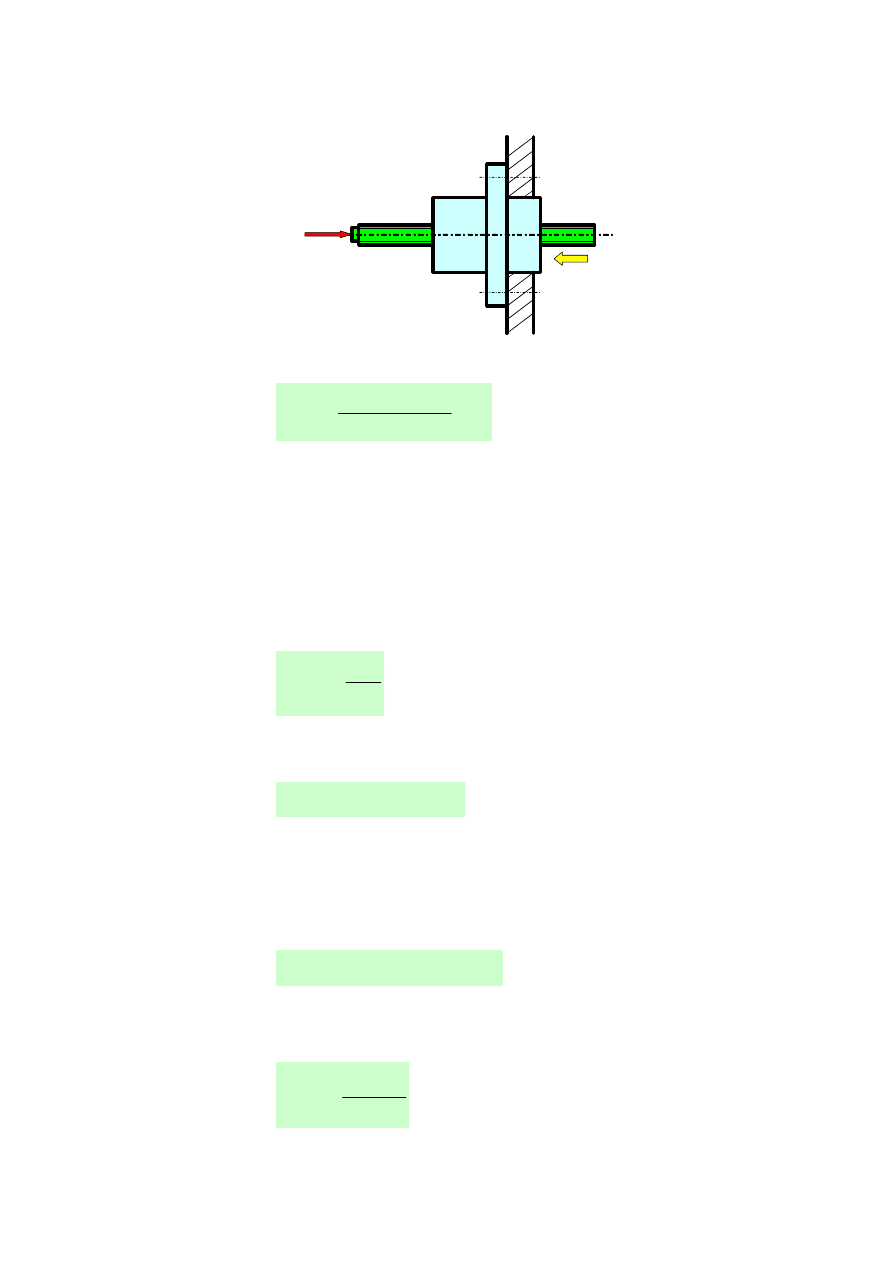
Popychacz może najłatwiej ulec wyboczeniu, gdy jest w skrajnym położe-
niu, maksymalnie wysunięty.
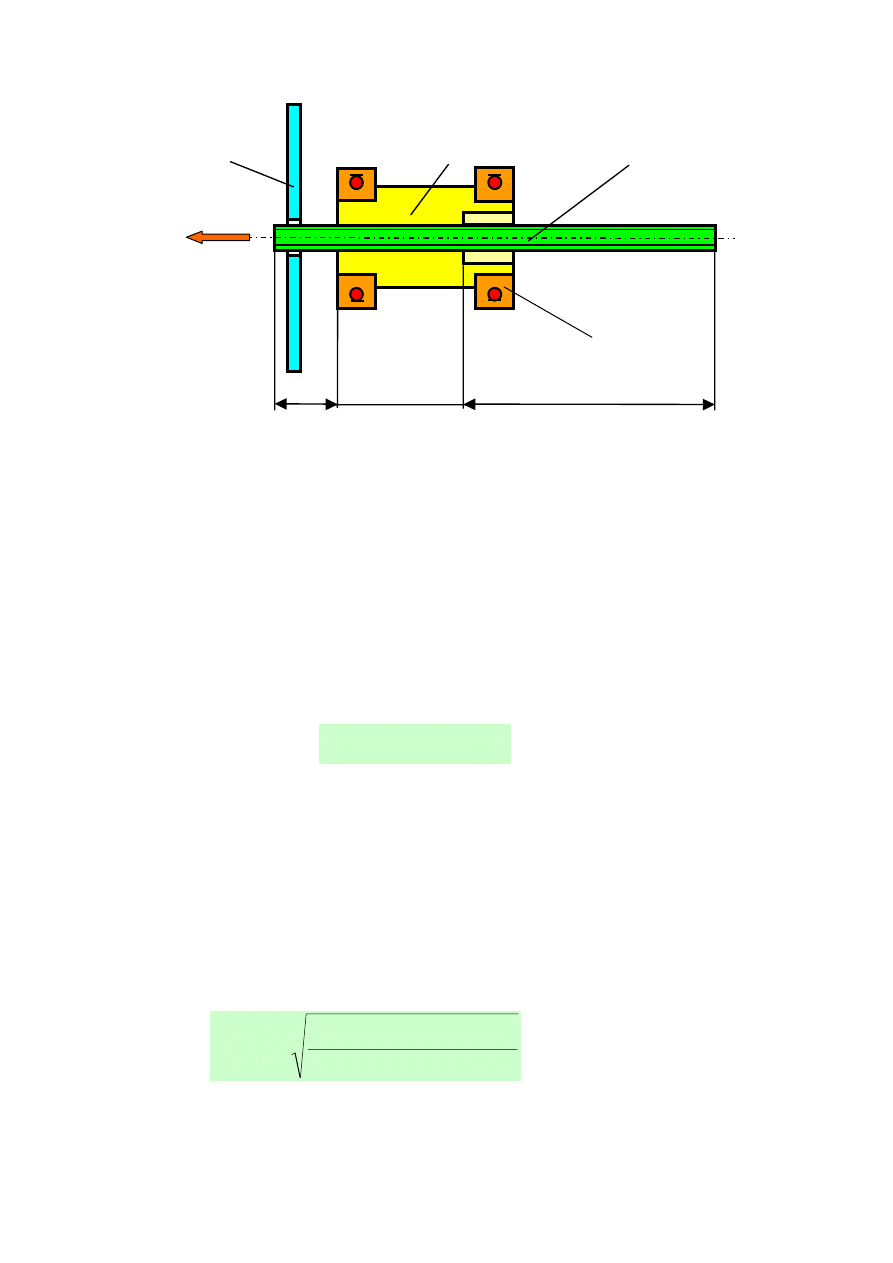
obudowa
nakrętka popychacz
kierunek
ruchu
łożysko toczne
L
d
L
z
L
max
Długość tej wysuniętej z nakrętki części popychacza wynosi:
L = L
max
+ L
d
(5)
Jest to ta część popychacza, która jest narażona na wyboczenie. Jako
miejsce utwierdzenia swobodnego popychacza przyjmujemy jego połącze-
nie z gwintem nakrętki. Dla tego schematu współczynnik
β
= 2 (wzór (2)).
Minimalna średnica rdzenia śruby d
rmin
ze względu na wyboczenie:
Jeśli w trakcie pracy nastąpi przeciążenie, to wtedy siła osiowa obcią-
żająca popychacz będzie równa:
max
max
Q
k
F
⋅
=
(6)
gdzie:
Q
max
- maksymalna siła obciążająca popychacz,
k - współczynnik przeciążenia przyjmowany zależnie od przewi-
dywanych warunków pracy (w projekcie przyjąć k = 3)
Minimalną średnicę rdzenia popychacza d
r min
, ze względu na wybo-
czenie, wylicza się przyjmując, że największa siła osiowa obciążająca po-
pychacz F
max
jest mniejsza lub co najwyżej równa sile krytycznej F
kr
.
Po podstawieniu zależności (2), (3), (5) i (6) do równania (1) oraz po
przekształceniach otrzymujemy:
4
3
2
2
max
min
r
E
L
Q
k
64
d
⋅
⋅
⋅
⋅
⋅
≥
π
β
(7)
Średnica rdzenia d
r
dobranej śruby powinna być większa od średnicy wyli-
czonej ze wzoru (7), czyli d
r
> d
r min
. Odpowiada jej średnica gwintu M(d).
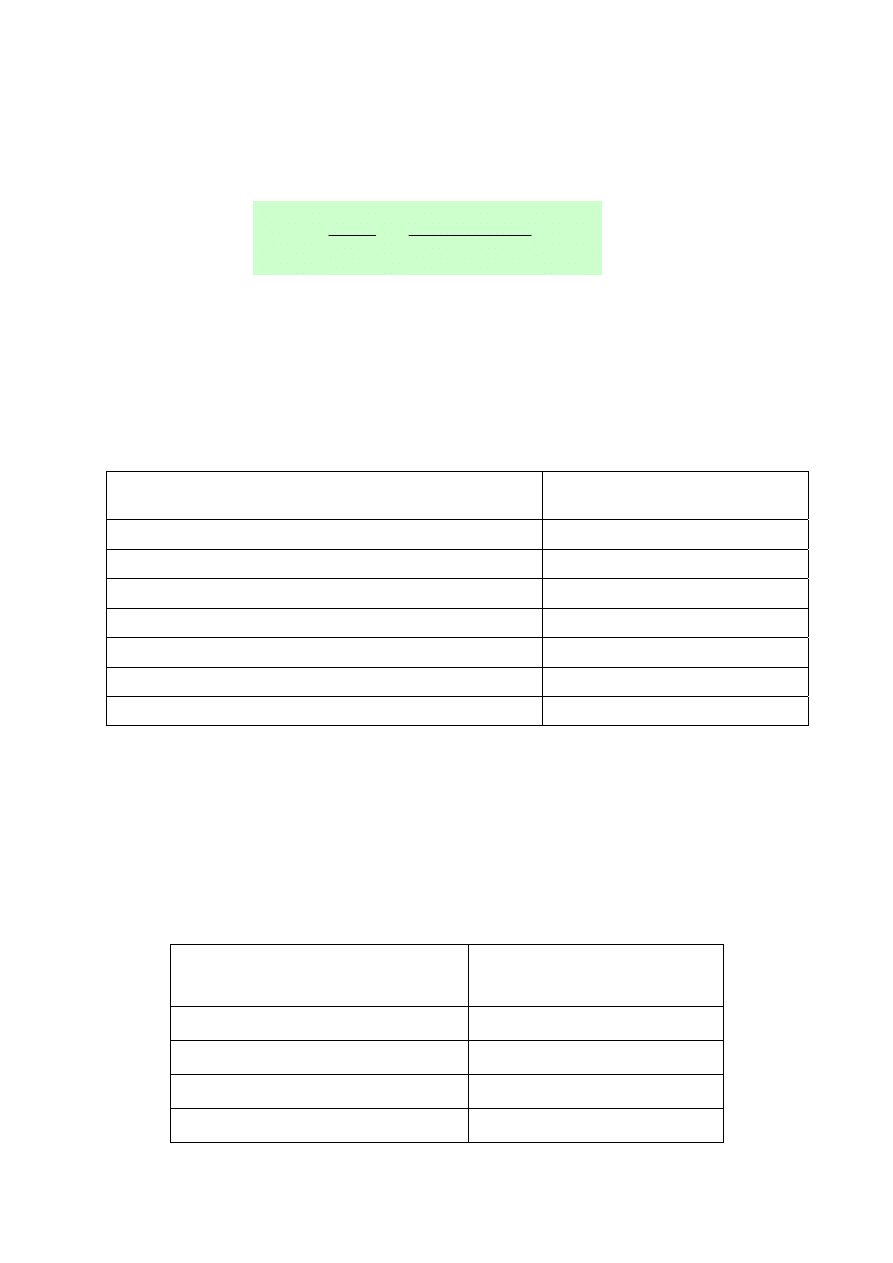
b) Obliczenie śruby na rozciąganie (ściskanie)
Osiowa siła Q
max
wywołuje również ściskanie lub rozciąganie popychacza,
a naprężenia
σ
c,r
wywołane maksymalną siłą osiową F
max
nie mogą prze-
kroczyć wartości dopuszczalnej k
c,r
.
r
,
c
2
r
max
max
r
,
c
k
d
Q
k
4
S
F
≤
⋅
⋅
⋅
=
=
π
σ
(8)
gdzie:
σ
c,r
-
naprężenia ściskające (rozciągające),
Q
max
- zadana robocza siła działająca w osi popychacza,
S
- powierzchnia przekroju rdzenia śruby,
d
r
- średnica rdzenia śruby, gwintu M(d) dobranego w pkt. a)
k
c,r
-
dopuszczalne
naprężenia ściskające lub rozciągające, przyjąć
k
c,r
= 0,5
⋅ R
e
.
Gatunek stali
Granica plastyczności R
e
[MPa]
A11 – stal automatowa, po walcowaniu
345
A45 – stal automatowa, po walcowaniu
325
45 – stal wyższej jakości, bez obr. cieplnej
360
45 – stal wyższej jakości ulepszana cieplnie
430
50G – stal niskostopowa normalizowana
390
15H – stal stopowa, hartowana
490
NW1 – „srebrzanka”, ulepszona cieplnie
650
Jeśli długość ześrubowania jest odpowiednio duża, tzn. L
z
> (3
÷
4)d
r
, nie
ma potrzeby sprawdzania połączenia na ścinanie gwintu i na naciski.
c) Dobór średnicy śruby popychacza ze względów technologicznych
Należy wziąć pod uwagę możliwości wykonania popychacza o okre-
ślonej długości w odniesieniu do jego średnicy.
Całkowita długość
popychacza
Zalecana minimalna
średnica gwintu
L
c
< 75
M3
75 < L
c
< 100
M4
100 < L
c
< 150
M5
L
c
>150 mm
M6
d) Ostateczny dobór średnicy śruby popychacza
Doboru średnicy gwintu popychacza należy dokonać biorąc pod uwa-
gę wszystkie trzy wyżej omówione kryteria:
a) wyboczenie popychacza,
b) wytrzymałość na ściskanie (rozciąganie),
c) względy technologiczne.
Skok gwintu P śruby dobieramy w korelacji z żądaną rozdzielczością
∆
s
pomiaru położenia i liczbą impulsów tarczy kodowej.
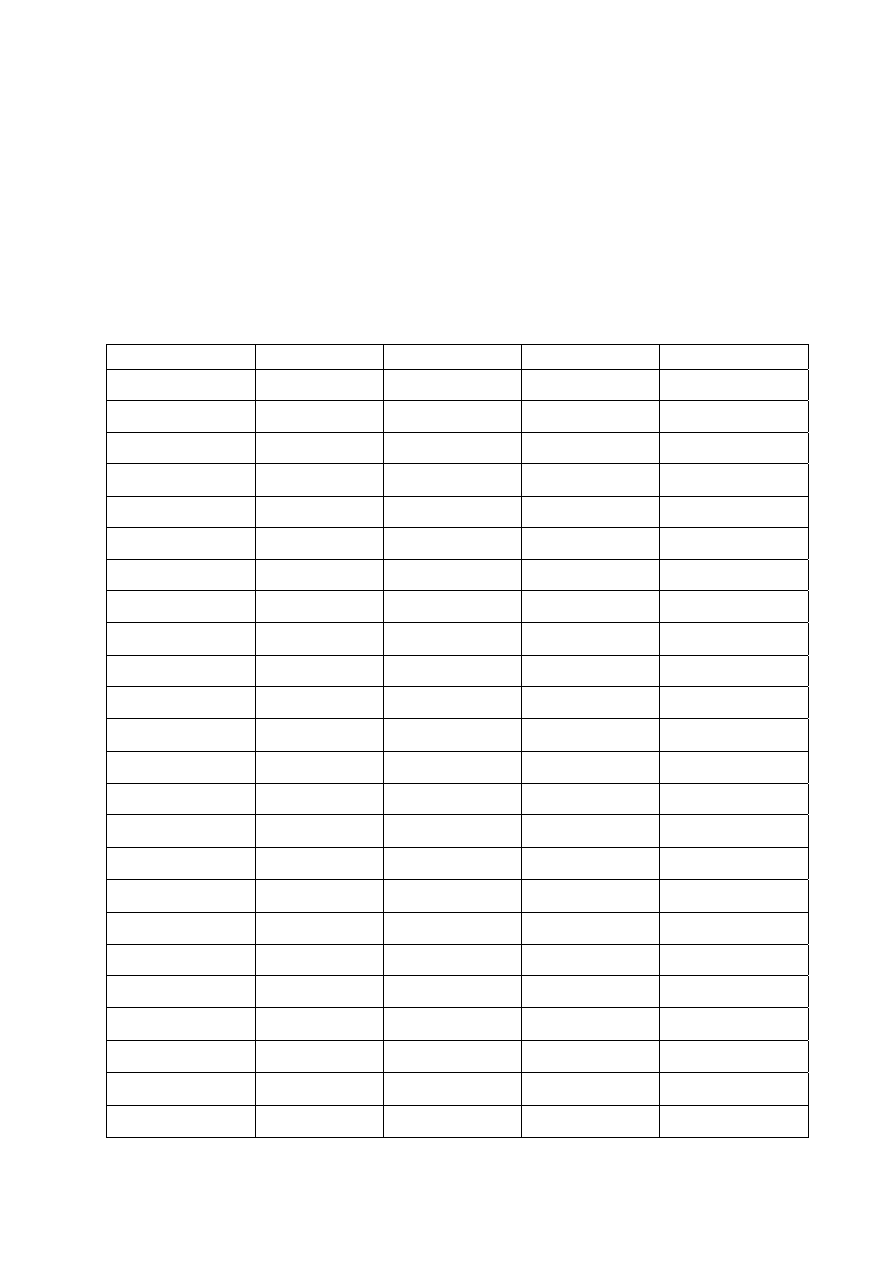
Wybrane wartości średnic gwintów metrycznych (wg PN-83/M-02013)
Oznaczenie
P [mm]
D
2
= d
2
d
r
= d
3
D
1
= d
1
M3 0,5
2,675
2,387
2,459
M3
×0,35
0,35 2,773
2,571 2,621
M4 0,7
3,545
3,141
3,242
M4
×0,5
0,5 3,675
3,387
3,459
M5 0,8
4,480
4,019
4,134
M5
×0,5
0,5 4,675
4,387
4,459
M6 1,0
5,351
4,773
4,917
M6
×0,75
0,75 5,513
5,080 5,188
M6
×0,5
0,5 5,675
5,387
5,459
M8 1,25
7,188
6,466
6,647
M8
×1
1,0 7,350
6,773
6,917
M8
×0,75
0,75 7,513
7,080 7,188
M8
×0,5
0,5 7,675
7,387
7,459
M10 1,5 9,026
8,160
8,376
M10
×1,25
1,25 9,188
8,466 8,647
M10
×1
1,0 9,35
8,773
8,917
M10
×0,75
0,75 9,513
9,080 9,188
M10
×0,5
0,5 9,675
9,387
9,459
M12 1,75
10,863
9,853
10,106
M12
×1,5
1,5 11,026
10,160
10,376
M12
×1,25
1,25 11,188
10,466
10,647
M12
×1,0
1,0 11,350
10,773
10,917
M12
×0,75
0,75 11,513
10,080
11,188
M12
×0,5
0,5 11,675
11,387
11,459
2. Wstępne obliczenie przełożenia - i
c
a) Obliczenie prędkości obrotowej nakrętki - n
nut
⎥⎦
⎤
⎢⎣
⎡
⋅
=
min
obr
P
v
60
n
max
nut
(9)
v
max
– maksymalna prędkość liniowa śruby (popychacza) w [mm/s],
P
– skok gwintu śruby, w [mm]
b) Wstępne obliczenie przełożenia całkowitego przekładni - i
c
Pierwszym elementem łańcucha kinematycznego wykonującym ruch
obrotowy jest wałek silnika, ostatnim zaś nakrętka.
Wymagana prędkość obrotowa nakrętki n
nut
jest znacznie mniejsza niż
robocza prędkość obrotowa wałka silnika. Dlatego między tymi elementami
musi być zastosowana przekładnia o przełożeniu redukcyjnym - i
p
.
nut
s
p
n
n
i
=
(10)
n
s
– wstępnie przyjęta prędkość robocza silnika, w [obr/min], zalecane
jest przyjęcie prędkości n
s
= (5000
÷ 6000) obr/min
c) Sposób realizacji przełożenia - i
p
Zadaniem przekładni jest redukcja prędkości oraz połączenie dwóch rów-
noległych do siebie osi: silnika i nakrętki.
C1) przełożenie małe, i
p
≤ 8
W takim przypadku stosujemy przekładnię własnej konstrukcji, jed-
nostopniową lub najwyżej dwustopniową. Graniczna wartość prze-
łożenia (i
p
= 8) podana jest orientacyjnie.
C2) przełożenie duże, i
p
> 8
Konstruktor ma w tym przypadku dwie możliwości:
- zastosować dwu lub trzystopniową przekładnię zębatą własnej
konstrukcji,
3
2
1
p
i
i
i
i
⋅
⋅
=
(11)
- zastosować motoreduktor handlowy, a więc połączenie silnika z
reduktorem oferowanym przez producenta silnika.
W tym przypadku, do połączenia równoległych osi motoredukto-
ra i nakrętki, konieczne jest jeszcze zastosowanie jednostop-
niowej przekładni sprzęgającej.
s
rh
p
i
i
i
⋅
=
(12)
Jest to rozwiązanie zalecane do realizacji.
3. Sprawność przekładni redukcyjnej -
η
p
a) reduktor wielostopniowy
Przyjmuje się, że sprawność jednostopniowej drobnomodułowej prze-
kładni zębatej jest równa
η
i
= 0,9. Ta wartość uwzględnia zarówno straty na
tarcie w zazębieniu jak i opory ruchu ułożyskowania ślizgowego.
Sprawność przekładni wielostopniowej jest iloczynem sprawności po-
szczególnych stopni:
...
3
2
1
p
⋅
⋅
⋅
=
η
η
η
η
(13)
b) reduktor handlowy i stopień sprzęgający
W tym przypadku sprawność przekładni redukcyjnej jest iloczynem
sprawności reduktora handlowego
η
rh
i sprawności stopnia sprzęgającego
η
s
:
s
rh
p
η
η
η
⋅
=
(14)
Sprawność
η
rh
reduktorów handlowych można odczytać z katalogów.
Wstępnie zaleca się przyjąć
η
rh
= 0,7
÷ 0,8 .
Sprawność stopnia sprzęgającego
η
s
= 0,9.
4. Sprawność zespołu śruba - nakrętka -
η
sr-n
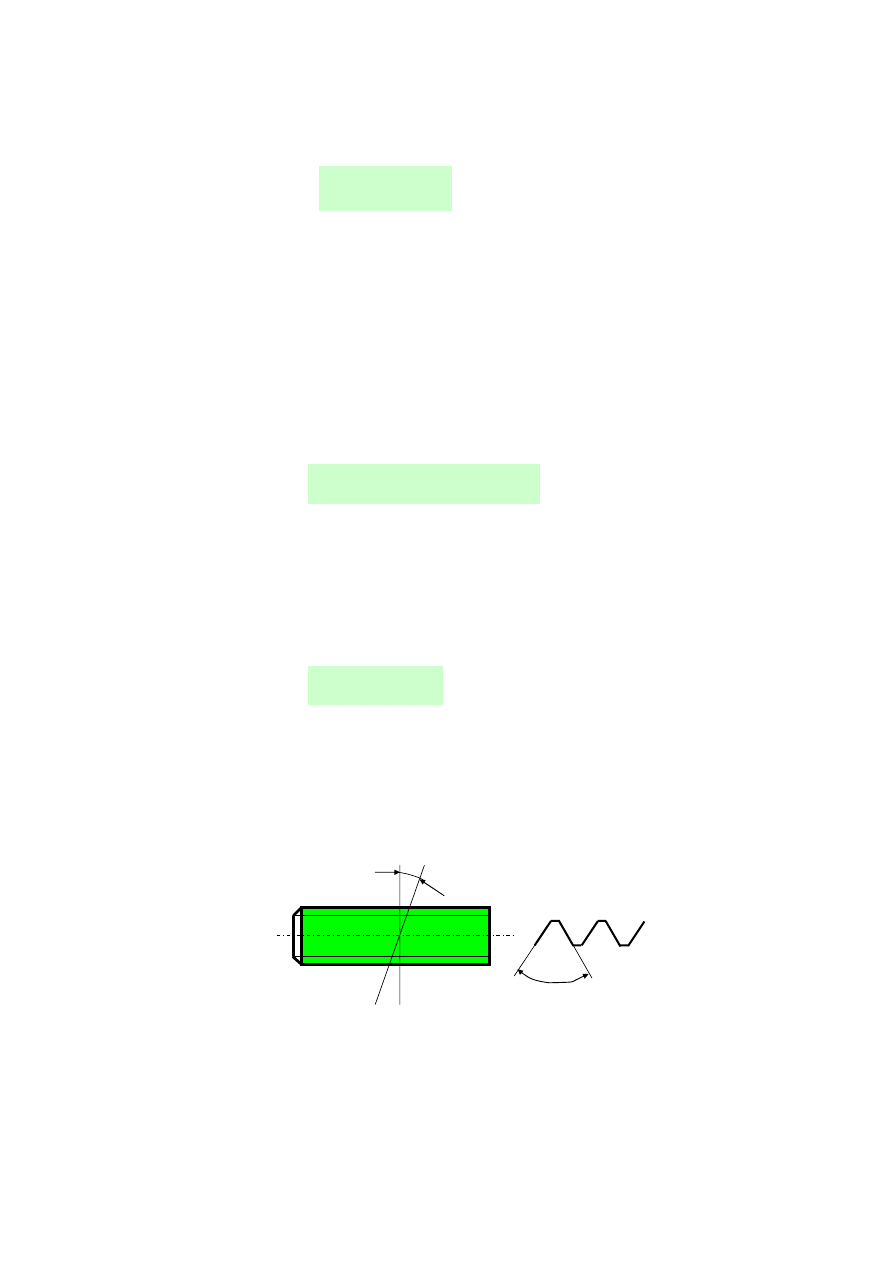
γ
α
γ
- kąt pochylenia linii śrubowej gwintu,
ρ
’ – pozorny kąt tarcia,
α
- kąt zarysu gwintu, dla gwintu metrycznego,
α = 60
o
P – skok gwintu w mm,
d
2
– średnia średnica gwintu w mm
)
'
(
tg
tg
n
sr
ρ
γ
γ
η
+
=
−
(15)
przy czym:
γ
= arctg
2
d
P
⋅
π
,
(16)
2
cos
arctg
'
arctg
'
α
µ
µ
ρ
=
=
(17)
µ’ – pozorny współczynnik tarcia,
µ - współczynnik tarcia materiałów śruby i nakrętki
5. Sprawność zespołu napędu liniowego -
η
znl
Sprawność mechanizmu jest iloczynem sprawności zespołów tworzą-
cych łańcuch kinematyczny tego mechanizmu.
W zespole napędu liniowego ZNL łańcuch kinematyczny, między wał-
kiem silnika a popychaczem, tworzą:
- wielostopniowy reduktor zębaty o sprawności
η
p
,
- zespół śruba – nakrętka o sprawności -
η
sr-n
.
Zatem sprawność całego zespołu ZNL jest równa:
n
sr
p
znl
−
⋅
=
η
η
η
(18)
Przykład:
Sprawność trzystopniowej przekładni redukcyjnej, gdy sprawność poje-
dynczego stopnia
η = 0,9 jest równa:
η
p
= 0,9 • 0,9• 0,9 = 0,729
Sprawność zespołu śruba–nakrętka, obliczona dla gwintu M5x0,5 i dla
współczynnika tarcia materiałów śruby i nakrętki (stal-mosiądz) -
µ
= 0,3:
η
sr-n
= 0,088
Zatem sprawność całego mechanizmu ZNL jest równa:
η
znl
=
η
p
⋅
η
sr-n
= 0,729
⋅
0,088 = 0,064
6. Moc na popychaczu – N
sr
Q
max
v
max
Moc, która musi być dostarczona przez napęd do popychacza jest równa:
]
w
[
1000
v
Q
N
max
max
sr
⋅
=
(19)
gdzie: Q
max
– maksymalne robocze obciążenie popychacza (śruby) wyra-
żone w [N],
v
max
– maksymalna prędkość ruchu popychacza wyrażona w [mm/s]
7. Minimalna moc silnika napędowego – N
siln
Minimalna moc na popychaczu zredukowana do wałka silnika, czyli moc
obliczeniowa – N
obl
, jest równa:
znl
sr
obl
N
N
η
=
(20)
Dla zapewnienia poprawnej pracy dobieramy silnik o mocy – N
siln
, nieco
większej od mocy N
obl
:
obl
ln
si
ln
si
N
k
N
⋅
=
(21)
gdzie: k
siln
– współczynnik bezpieczeństwa, należy przyjąć k
siln
= (1,3
÷ 1,5)
Wyznaczony przedział wartości mocy, dla k = 1,3 oraz dla k = 1,5 po-
zwala wybrać z całego katalogu tylko kilka silników takich, których moc
maksymalna P
2max
mieści się w tym przedziale.
o
h
max
2
M
25
,
0
P
ω
⋅
=
(22)
gdzie: M
h
– moment rozruchowy (startowy) wybranego silnika,
ω
o
– prędkość kątowa biegu jałowego wybranego silnika,
30
n
o
o
⋅
=
π
ω
(23)
8. Moment – M
nut
niezbędny do zapewnienia ruchu obrotowe-
go nakrętki
Moment niezbędny do zapewnienia ruchu obrotowego nakrętki - M
nut
jest równy momentowi tarcia w połączeniu śruba-nakrętka.
Określa się go podczas pracy układu a więc wtedy, gdy śruba jest ob-
ciążona siłą osiową Q
max
. W obliczeniu pominięto moment oporów ruchu w
ułożyskowaniu nakrętki.
(
)
'
tg
d
Q
5
,
0
M
2
max
nut
ρ
γ
+
⋅
⋅
⋅
=
(24)
gdzie: d
2
– średnia średnica gwintu popychacza w mm,
γ
- kąt pochylenia linii śrubowej gwintu popychacza, wg (16)
ρ
’ – pozorny kąt tarcia pary materiałów śruby i nakrętki, wg (17)
Q
max
– siła osiowa obciążająca popychacz, w [N],
M
nut
– moment wyrażony w mNm
9. Moment obciążenia zredukowany do wałka silnika – M
zred
Moment M
nut
niezbędny do zapewnienia ruchu obrotowego nakrętki
jest momentem obciążającym. Jego wartość jest zmniejszona przez prze-
kładnię redukcyjną znajdującą się między wałkiem silnika a nakrętką. Bez-
pośrednim obciążeniem wałka silnika jest więc moment M
zred
, którego war-
tość jest równa:
p
p
nut
zred
i
M
M
η
⋅
=
(25)
gdzie: M
nut
– moment niezbędny do zapewnienia ruchu obrotowego na-
krętki, wyrażony w mNm
i
p
– przełożenie przekładni redukcyjnej znajdującej się między
wałkiem silnika a nakrętką, wg (12),
η
p
– sprawność przekładni redukcyjnej znajdującej się między
wałkiem silnika a nakrętką, wg (14),
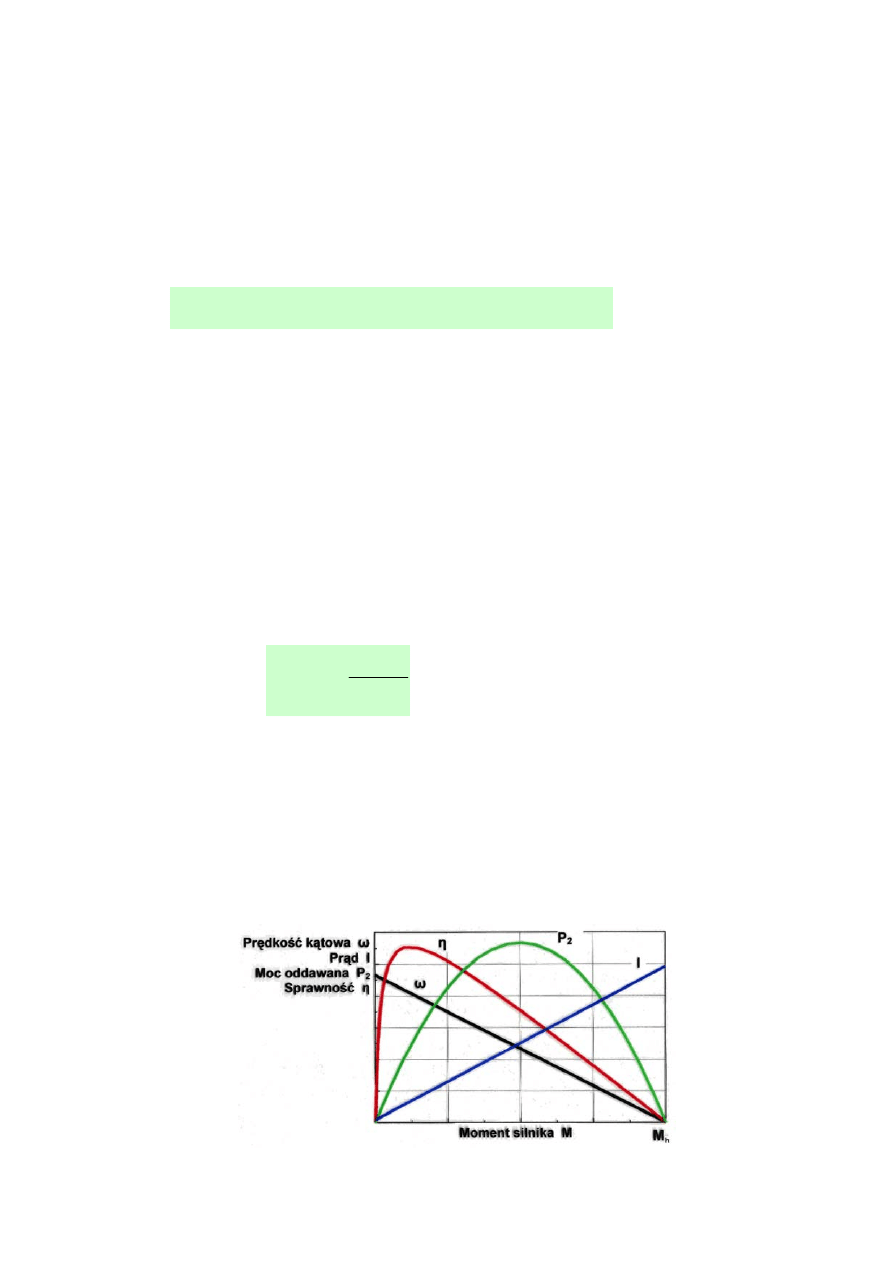
10. Charakterystyki obciążeniowe silnika prądu stałego
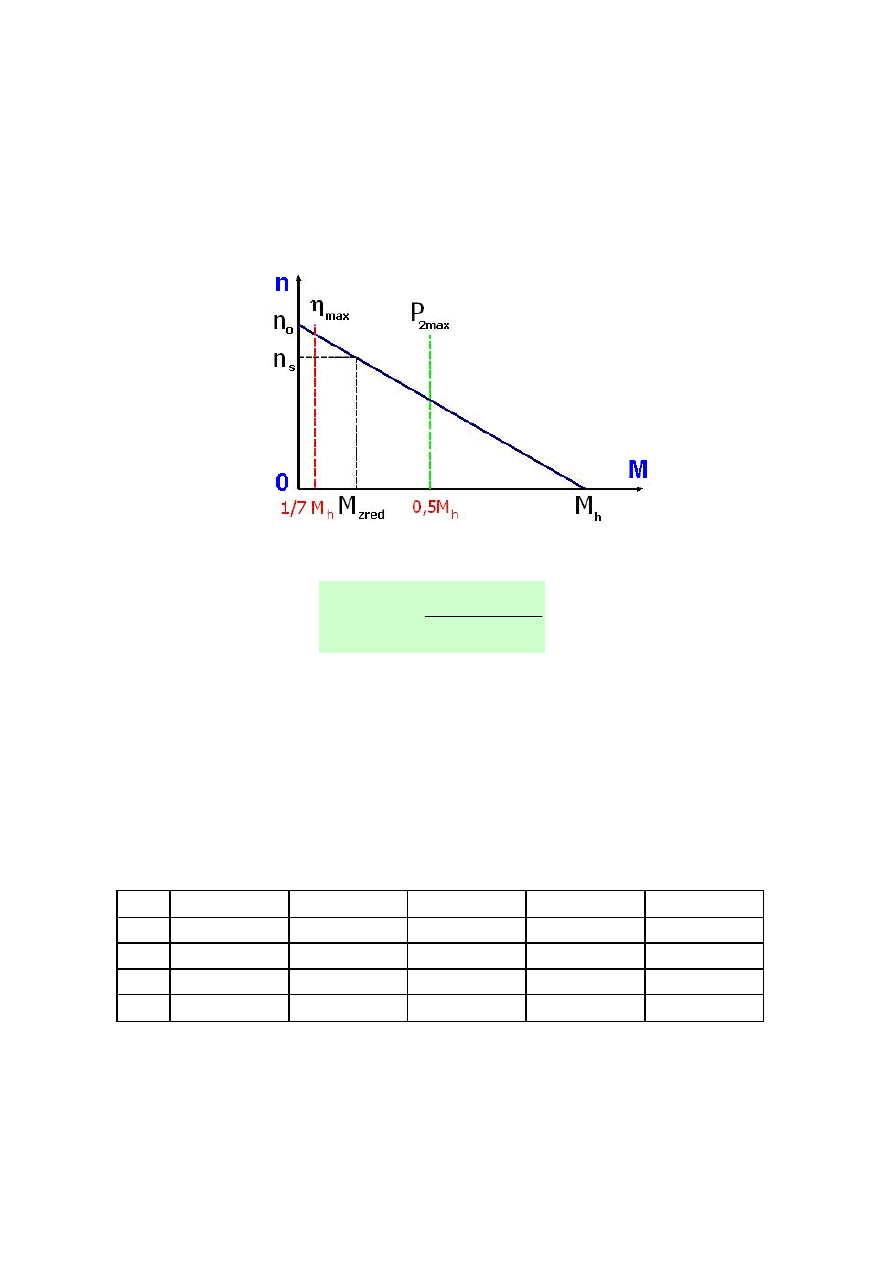
11. Dobór punktu pracy silnika prądu stałego
Dla wybranego silnika należy ustalić punkt jego pracy, czyli określić
prędkość roboczą n
siln
.
Wykorzystuje się liniowy przebieg charakterystyki prędkości w funkcji ob-
ciążenia, n = f(M). Punkt pracy dobiera się tak, aby moment obciążenia
zredukowany do wałka silnika znajdował się między 0,5M
h
a 1/7 M
h
.
Z rysunku charakterystyki wynika następująca zależność:
h
zred
h
o
s
M
M
M
n
n
−
⋅
=
(26)
w której:
n
o
– prędkość biegu jałowego silnika [obr/min] ,
n
s
– prędkość robocza silnika,
M
h
– moment rozruchowy (startowy) silnika,
M
zred
– moment obciążenia zredukowany do wałka silnika.
Obliczenia należy przeprowadzić metodą kolejnych przybliżeń do momentu
aż nowa wyliczona prędkość obrotowa będzie mniejsza od poprzedniej o
mniej niż 50 obr/min. Wyniki obliczeń najlepiej przedstawić w tabeli.
n
k
i M
zred
n
k+1
∆n
1 6000 80 2,53 7500 1500
2
7500
3
4
n
s
i
p
≤50
Obliczona robocza prędkość obrotowa silnika n
s
oraz odpowiadające jej
przełożenie i
p
przekładni to wartości które przyjmujemy w projekcie.
12. Dobór reduktora handlowego oraz przełożenia stopnia
sprzęgającego
Reduktor handlowy należy dobrać spośród zalecanych przez produ-
centa do danego silnika. Reduktory jednego typu (o jednej średnicy ze-
wnętrznej) realizują wiele przełożeń.
Należy zabiegać aby stopień sprzęgający miał przełożenie i
sp
= 2
÷4.
Stwarza to szansę na to, że przy przyjętej, ze względów konstrukcyjnych,
odległości osi motoreduktora i popychacza, liczba zębów zębnika osadzo-
nego na wałku motoreduktora będzie niezbyt duża, mniejsza niż z
g
= 17.
Dobierając reduktor handlowy należy sprawdzić jaka jest zalecana
dla niego przez producenta prędkość wejściowa przy pracy ciągłej (zwykle
jest to n
we
= 5000
÷8000 obr/min).
Jeśli wybrany silnik pracuje przy prędkości roboczej n
s
większej niż
n
we
reduktora, tj. n
s
> n
we
, wtedy nie jest możliwa praca ciągła napędu.
W takiej sytuacji należy:
- przyjąć pracę nieciągłą dla zespołu, umieszczając na rysunku
złożeniowym uwagę: Dopuszcza się pracę np. 8-10 godzin na
dobę.
- dobrać nowy silnik dla którego prędkość robocza n
s
będzie
mniejsza niż prędkość n
we
reduktora.
13. Moment sprzęgła przeciążeniowego M
sp
Moment przenoszony przez sprzęgło przeciążeniowe M
sp
powinien
być 30÷50% większy od momentu roboczego jakim jest M
nut
.
nut
sp
M
)
5
,
1
3
,
1
(
M
⋅
÷
=
14. Minimalna liczba impulsów n
imp
tarczy na jeden obrót
Liczba impulsów tarczy na jeden obrót wynika z zadanej rozdzielczości
∆s oraz ze skoku p gwintu popychacza.
s
p
1000
n
imp
∆
⋅
=
gdzie: p – skok gwintu wyrażony w mm,
∆s – rozdzielczość wyrażona w µm
Niekiedy w katalogach podana jest liczba cykli CPR tarczy na jeden obrót.
Wtedy należy tarczę dobierać według liczby CPR korzystając z zależności:
imp
CPR
n
25
,
0
n
⋅
=
Wyszukiwarka
Podobne podstrony:
2 znl algorytm2010'11id 21184 Nieznany (2)
ALGORYTM id 57461 Nieznany
Algorytm obliczania parametrow Nieznany
Algorytmy Genetyczne A Logika R Nieznany (2)
algorytmika id 57568 Nieznany (2)
ALGORYTM SLEDZENIA TRAJEKTORII Nieznany (2)
4 Klient algorytmy id 37672 Nieznany (2)
Algorytm poszukiwania ukladow w Nieznany
algorytmy 5 id 57587 Nieznany (2)
Algorytmy immunologiczne S T Wi Nieznany (2)
algorytmy numeryczne w delphi Nieznany (2)
Algorytmy 2 id 57578 Nieznany
3 algorytmy id 33513 Nieznany (2)
Algorytmy I Struktury Danych (W Nieznany (2)
Algorytmy1 id 57858 Nieznany
Algorytm Genetyczny Sprawozdani Nieznany (2)
Algorytmy2 id 57859 Nieznany
1 Algorytm Euklidesaid 9036 Nieznany (2)
więcej podobnych podstron