
CHARAKTERYSTYKI STATYCZNE PRZETWORNIKÓW POMIAROWYCH
Transport informacji w postaci sygnału wykazuje wiele podobieństw do trans-
portu energii, stanowiącej jego nośnik. W szczególności transportowi energii zawsze
towarzyszy jej rozpraszanie (straty). Podobnie rozpraszaniu (bezpowrotnej stracie)
ulega część informacji zawartej w przekazywanym sygnale. Straty te, nazywane
inaczej zniekształceniami sygnału, w klasycznej teorii metrologii odpowiadają pojęcia
błędów pomiarowych. Minimalizacja błędów pomiarowych sprowadza się, więc do
zapobiegania zniekształceniom sygnału w aparaturze pomiarowej. Współczesna
aparatura pomiarowa najczęściej posługuje się sygnałem, w którym nośnikiem ener-
getycznym jest energia elektryczna. Zakładając, że zestaw aparatury (tor pomiaro-
wy) do danego zadania pomiarowego jest funkcjonalnie prawidłowy (nie popełniono
błędów przy opracowaniu zasady pomiaru, metody pomiarowej itp.) oraz, że
sprawne są poszczególne człony zestawu - na ogół odrębne przyrządy, we własnych
obudowach, tzw. „przyrządy uniwersalne” - ewentualnych zniekształceń sygnału
należy upatrywać w połączeniach pomiędzy członami.
Każdy pomiar realizuje się w pewien sposób przez porównanie wielkości mierzonej
względem określonego wzorca. Istnieje jednak wiele metod osiągnięcia tego celu,
1. Metodą bezpośrednia wykonywania pomiaru jest to metoda, za pomocą,
której uzyskuje się wartość wielkości mierzonej bezpośrednio, bez potrzeby
dodatkowych obliczeń opartych na zależności funkcjonalnej wielkości mie-
rzonej od innych wielkości bezpośrednio mierzonych. W tej metodzie wszyst-
kie obliczenia wykonywane są wewnątrz przyrządu.
2. Metoda pośrednia wykonywania pomiaru jest to taka metoda, w której ba-
dany parametr uzyskuje się przez wykorzystanie "pośrednich" wielkości o
różnych wymiarach, które są powiązane ze sobą funkcjonalnie w pewien
sposób. Przykładem metody pośredniej może być pomiar odległości przez
pomiar czasu przejścia impulsu promieniowania np. świetlnego.
3. Metoda porównawcza wykonywania pomiaru jest to taka metoda pomiaro-
wa, która opiera się na porównaniu wartości wielkości mierzonej z wartością
znaną tej samej wielkości lub ze znaną wartością innej wielkości, która wyka-
Strona 1

zuje zależność funkcyjną od wielkości mierzonej. W tej metoda można wy-
różnić następujące metody pomiarowe:
a. Metoda bezpośredniego porównania
b. Metoda wychyłowa
c. Metoda różnicowa
d. Metoda zerowa
e. Metoda komplementarna (uzupełnienia)
f.
Metoda rezonansowa
Własności wejściowe i wyjściowe przyrządów - członów aparatury
Przetwornik pomiarowy stanowi względnie wyodrębniony zespół elementów, które
służą do przetwarzania - z określoną dokładnością i według określonego prawa -
wartości wielkości mierzonej (albo wielkości już przetworzonej z wielkości mierzonej)
na wartość innej wielkości lub inną wartość tej samej wielkości.
Sygnały wnoszące informacje do przetworników pomiarowych nazywa się sygnała-
mi wejściowymi. Powodują one powstanie na wyjściu przetworników sygnałów
wyjściowych.
Elementy składowe przetworników. Przetworniki zbudowane są z trzech rodzajów
elementów podstawowych:
1. Elementy powodujące straty energii rozpraszanej na energię cieplną;
2. Elementy magazynujące energię w postaci kinetycznej;
3. Elementy magazynujące energię w postaci potencjalnej.
Układ pomiarowy. Przez połączenie przetworników współpracujących w procesie
pomiaru powstaje układ pomiarowy tworzący łańcuch odbioru i przetwarzania
informacji pomiarowych o wielkości mierzonej.
Przetworniki pomiarowe zostały zdefiniowane jako urządzenia przetwarzające
energię. Biorąc pod uwagę rodzaje energii na wejściach przetworników pomiaro-
wych, można wyróżnić kilka najważniejszych typów przetworników:
Mechaniczne
Chemiczne
Magnetyczne
Strona 2
Elektryczne
Optyczne
Termiczne
Akustyczne
Nuklearne
Biorąc pod uwagę postać przetwarzanego sygnału przetworniki dzielimy na:
Analogowe A/A.
Cyfrowe C/C.
Analogowo-cyfrowe A/C.
Cyfrowo-analogowe C/A.
Nie wnikając w tym miejscu, w sposób przetwarzania sygnału wewnątrz przyrządu
pomiarowego, prawidłowe połączenia przyrządów pomiarowych w zestawy, można
uzyskać jedynie w oparciu o znajomość parametrów wejściowych i wyjściowych
poszczególnych aparatów. Parametry te są zawarte w dokumentacji technicznej
przyrządów, czasem są umieszczane na ich obudowie a niektóre są objęte normali-
zacją.
Parametry wejściowe
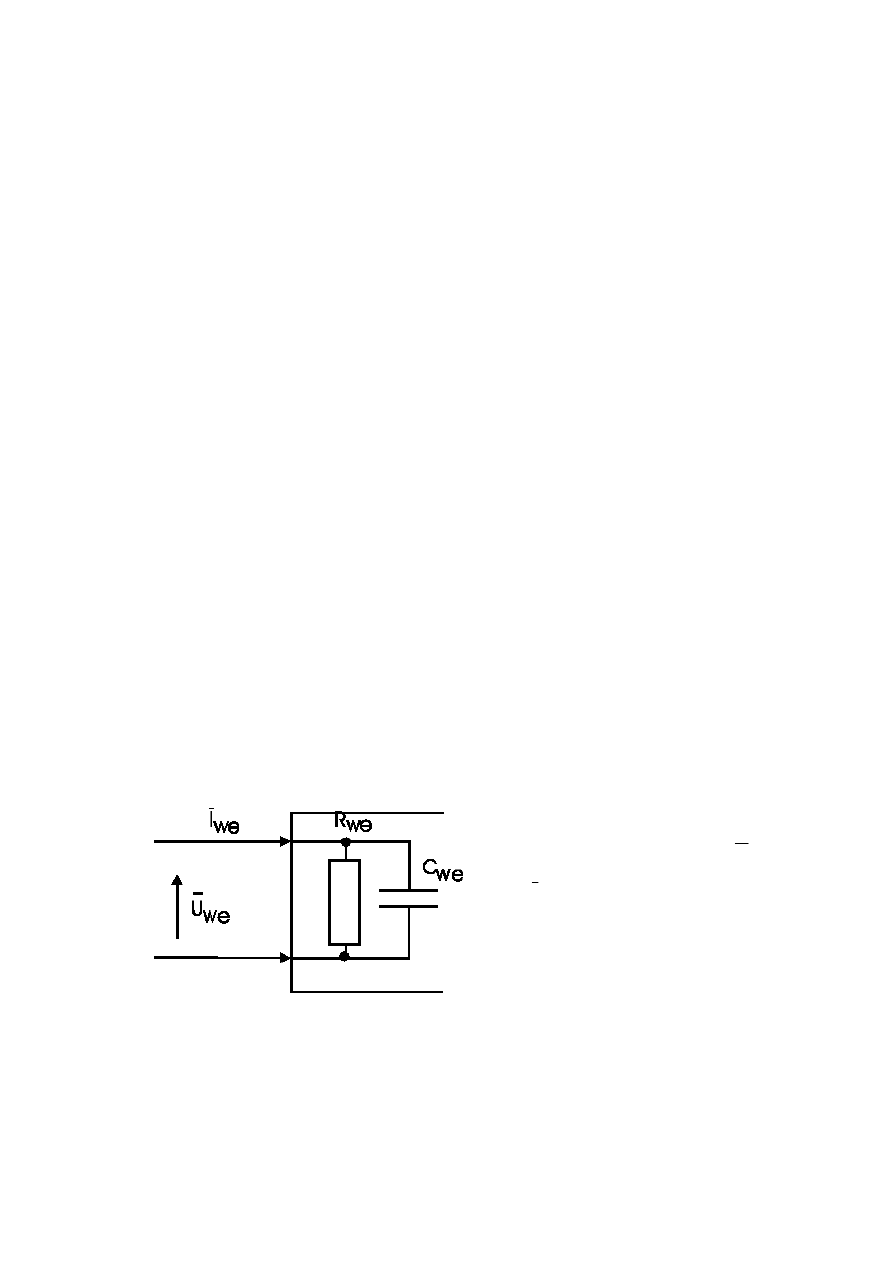
Rysunek 1 przedstawia układ
zastępczy wejścia, słuszny dla
większości przyrządów
pomiarowych. Wartość
we
U lub
we
I (są one związane uogólnio-
nym prawem Ohma) jest
parametrem sygnału wejścio-
wego zawierającym informacje.
Wartość ta podawana jest
zwykle jako skuteczna (RMS),
szczytowa lub amplituda
Rys.1 Schemat zastępczy układu wejścia
Strona 3
napięcia. R
we
jest rezystancją wejściową (opornością czynną przyrządu widzianego
od strony zacisków wejściowych), C
we
jest pojemnością wejściową.
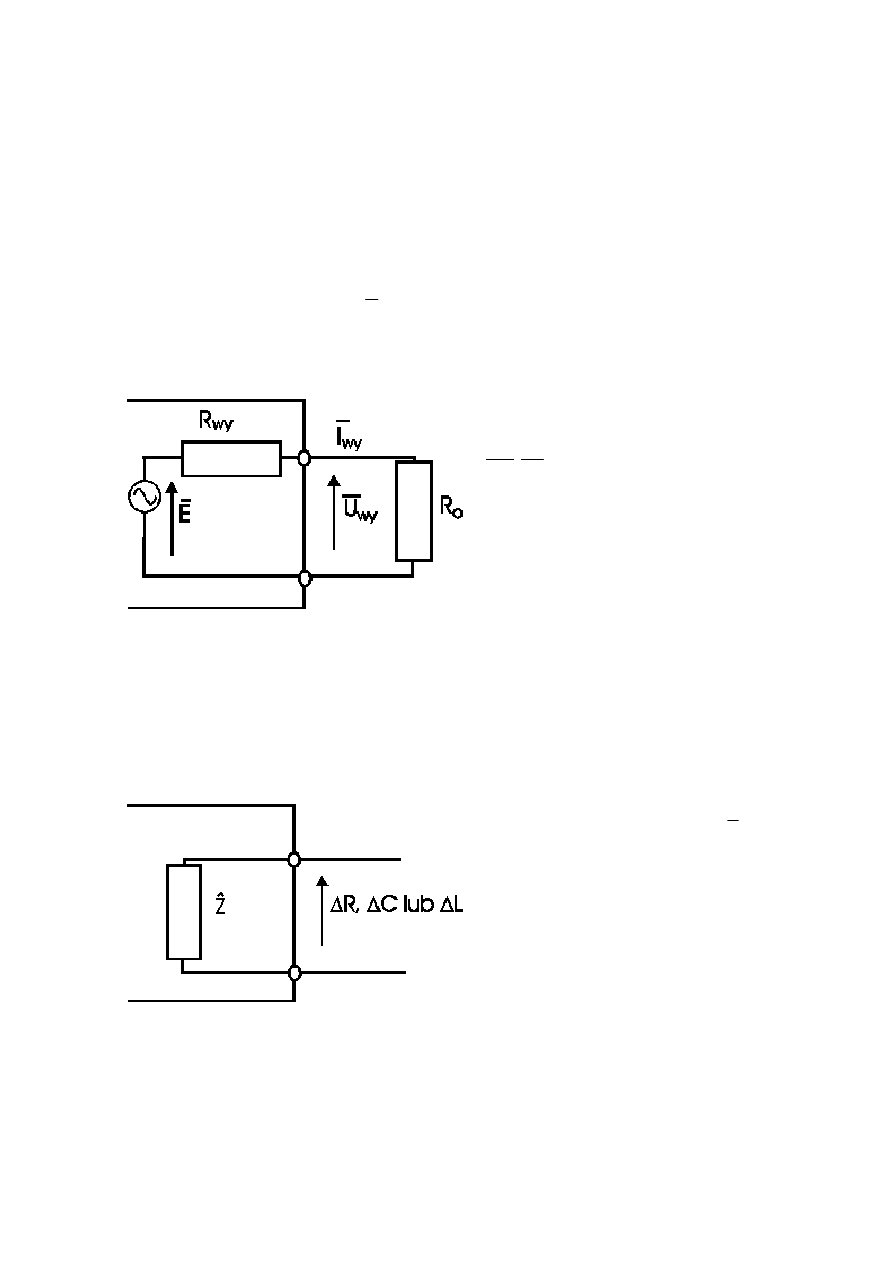
Parametry wyjściowe
Jeden z możliwych wariantów układu zastępczego „czynnego” wyjścia przyrządu
przedstawia rysunku 2 (wyjściem czynnym nazywamy wyjście, z którego może być
czerpana energia elektryczna). E jest siłą elektromotoryczną źródła napięciowego,
szeregowa rezystancja R
wy
- rezystancją wyjściową urządzenia. R
o
czyli oporność
obciążenia reprezentuje rezystancję
wejściową urządzenia współpracują-
cego z wyjściem przyrządu. Wartości
U
I
wy
wy
,
są parametrami sygnału
wyjściowego zawierające informacje.
Zasadniczo inny jest układ zastępczy
tzw. wyjścia biernego (parametrycz-
nego). Przyrządy posiadające takie
wyjście nie generują w swoim
wnętrzu energii elektrycznej a więc nie wytwarzają sygnału. Informacja pojawia się
na takim wyjściu w postaci zmiany któregoś z parametrów obwodu (rezystancji,
pojemności lub indukcyjności) i może być przekształcona w sygnał dopiero w
następnym członie aparatury, odpowiednio skonstruowanym. Schemat zastępczy
wyjścia parametrycznego przedsta-
wia ogólnie rys. 3, gdzie jest
uogólnioną zastępczą impedancją
wyjściową układu.
Rys.2. Schemat zastępczy czynnego układu wyjściowego
Rys.3. Schemat układu wyjściowego parametrycznego
Z
Strona 4
Własności przejściowe przyrządów
Prawidłowe przetwarzanie sygnałów wewnątrz przyrządu (między jego wej-
ściem a wyjściem) odbywa się zawsze tylko w pewnych granicach zmian sygnału
wejściowego. Najistotniejsze są dwa ograniczenia opisane niżej.
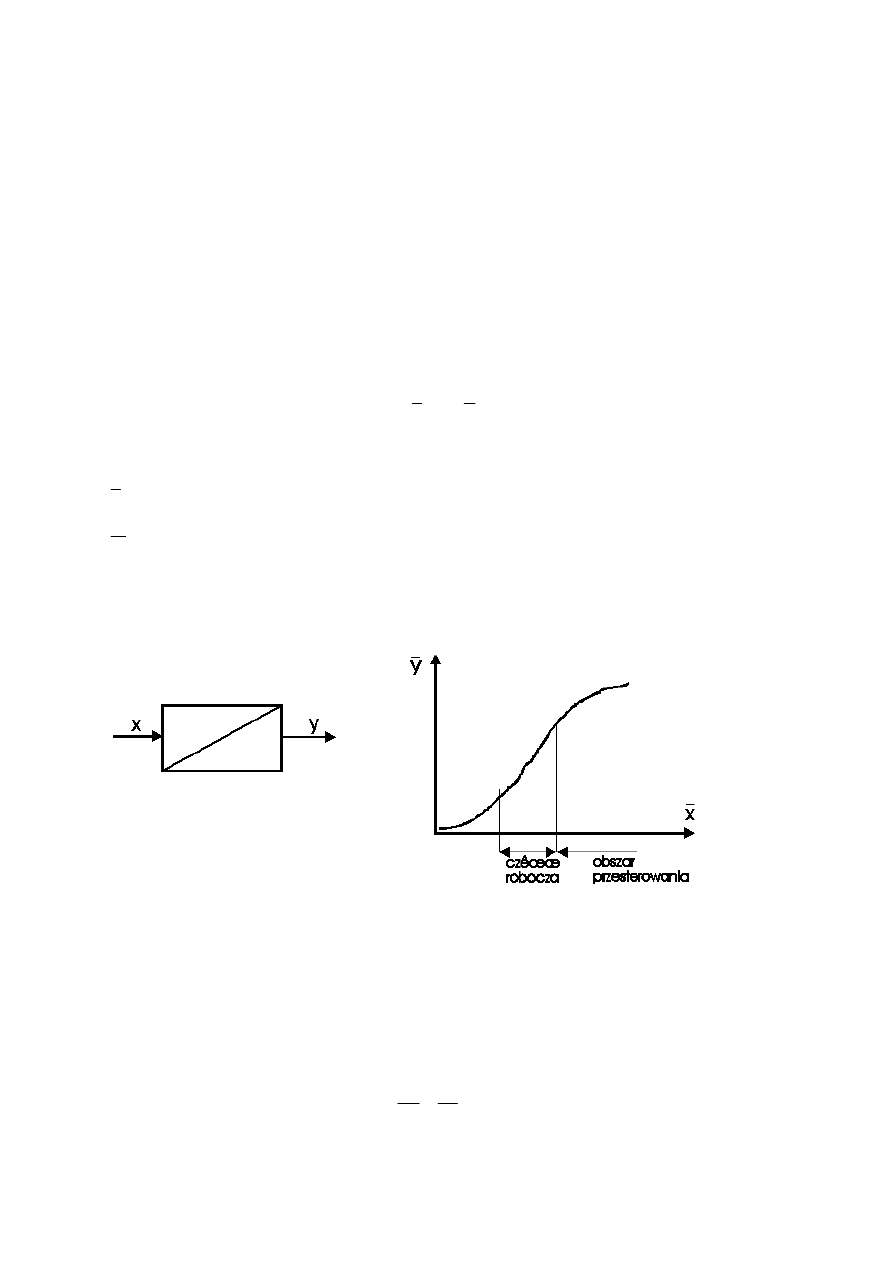
Ograniczenia wynikające z kształtu charakterystyki statycznej
Statyczną funkcją przetwarzania przyrządu nazywamy zależność przedstawioną
graficznie jako charakterystykę statyczną ( rys. 4)
)
(X
f
Y
=
gdzie:
Y - istotna z punktu widzenia zawartości informacji cecha sygnału wyjściowego,
X - istotna z punktu widzenia zawartości informacji cecha sygnału wejściowego.
Rys. 4 Charakterystyka statyczna przyrządu
Część robocza charakterystyki statycznej jest zwykle prostoliniowa.
Czułość statyczna - granica stosunku przyrostu wielkości wyjściowej do wywołują-
cego tę zmianę przyrostu wielkości wejściowej:
α
tg
dx
dy
x
y
S
x
=
=
∆
∆
=
→
∆
0
lim
Strona 5
W praktyce z wystarczającą dokładnością przyjmuje się jako czułość stosunek skoń-
czonych przyrostów odpowiednich wielkości:
x
y
S
∆
∆
≈
Czułość statyczna jest wielkością mianowaną. Wymiar czułości zależy od wielkości
wejściowej i wyjściowej przetwornika (np. termoelement: V/K;). Jest ona wielkością
stałą w całym zakresie pomiarowym jedynie dla przyrządów o liniowej charakterysty-
ce przetwarzania. Odwrotność czułości nazywana jest stałą przyrządu:
y
x
S
C
∆
∆
=
=
1
Y
X
S=tga
Rys.5 Geometryczna interpretacja czułości statycznej:
Jeżeli idealna funkcja przetwarzania jest prosta przechodząca przez początek
układu współrzędnych i „S” jest stałe w całym zakresie wielkości wejściowej „X” to
przetwornik nazywamy liniowym. Uchyby statyczne przetwornika (błędy przetwa-
rzania). Różnica między charakterystyką statyczną idealną a rzeczywistą jest miarą
dokładności przetwornika w stanie statycznym.
Strona 6
Uchyb bezwzględny odniesiony do wejścia:
e
rzeczywist
e
idea
x
x
x
−
=
∆
ln
.
Uchyb statyczny bez-
względny odniesiony do wyjścia:
Y
X
idealna
rzeczywista
X
rzeczywiste
X
idealne
DX
Rys. 6.
Charakterystyka statyczna
rzeczywista i idealnego przetwornika pomiarowego z
zaznaczeniem uchybu odniesionego do wejścia
e
idea
e
rzeczywisy
y
y
y
ln
−
=
∆
Y
X
idealna
rzeczywista
Y
rzeczywiste
Y
idealne
DY
Rys. 7.
Charakterystyka statyczna rzeczywista i
idealnego przetwornika pomiarowego z zaznaczeniem
uchybu odniesionego do wyjścia
Strona 7
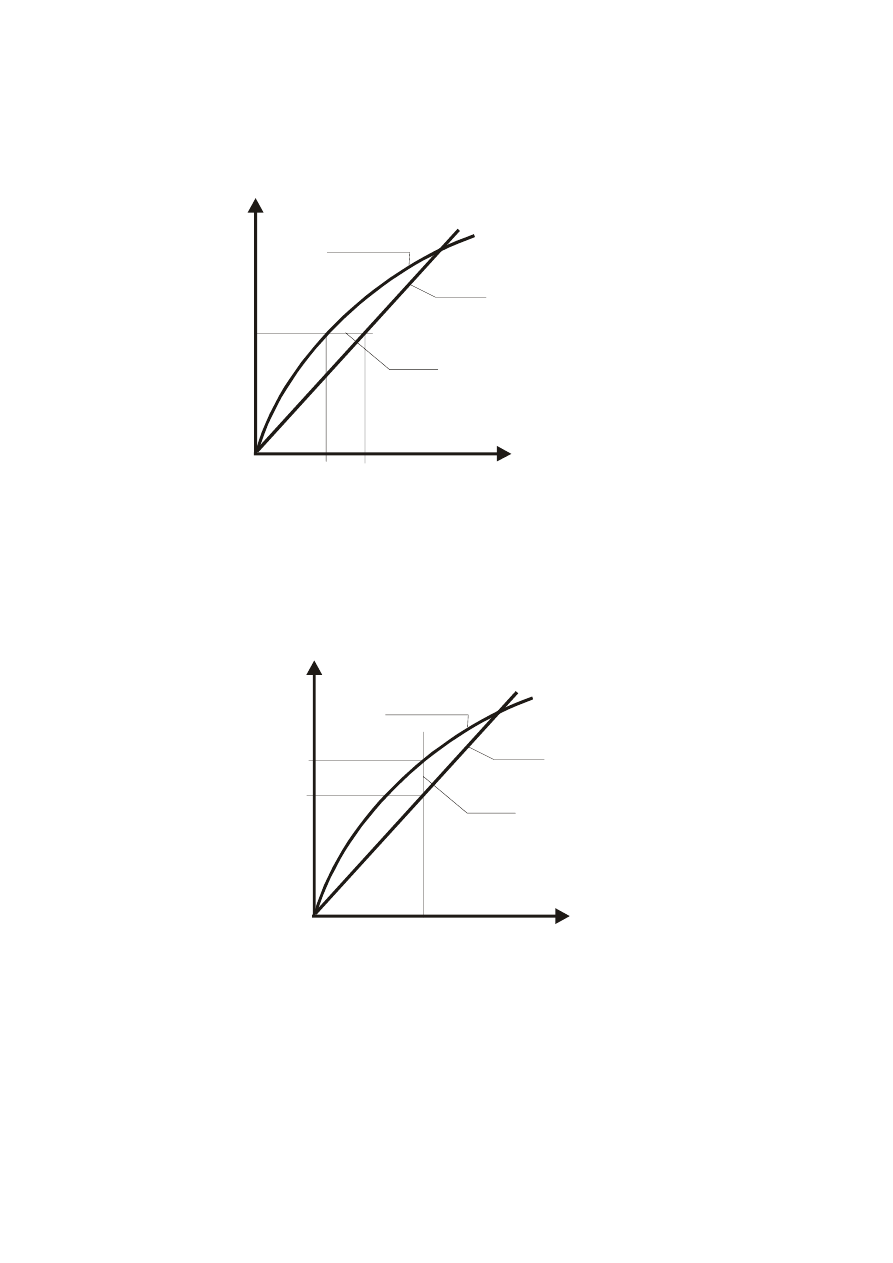
Jako miarę nieliniowości przyjmuje się często maksymalne odchylenie rzeczywistej
charakterystyki przetwarzania od charakterystyki idealnej w postaci linii prostej.
Używa się zwykle miary względnej:
min
max
max
y
y
y
sci
nieliniowo
blad
−
∆
=
Zakres pomiarowy - zakres zmian wartości wielkości wejściowej, dla których
odpowiednie wartości wielkości wyjściowej przetwornika, otrzymane w normalnych
warunkach użytkowania i z jednego tylko pomiaru, nie powinny być obarczone
błędem większym od granicznego błędu dopuszczalnego.
Y
X
idealna
rzeczywista
Y
max
Y
min
DY
max
Rys. 8.
Interpretacja graficzna błędu nieliniowości
8
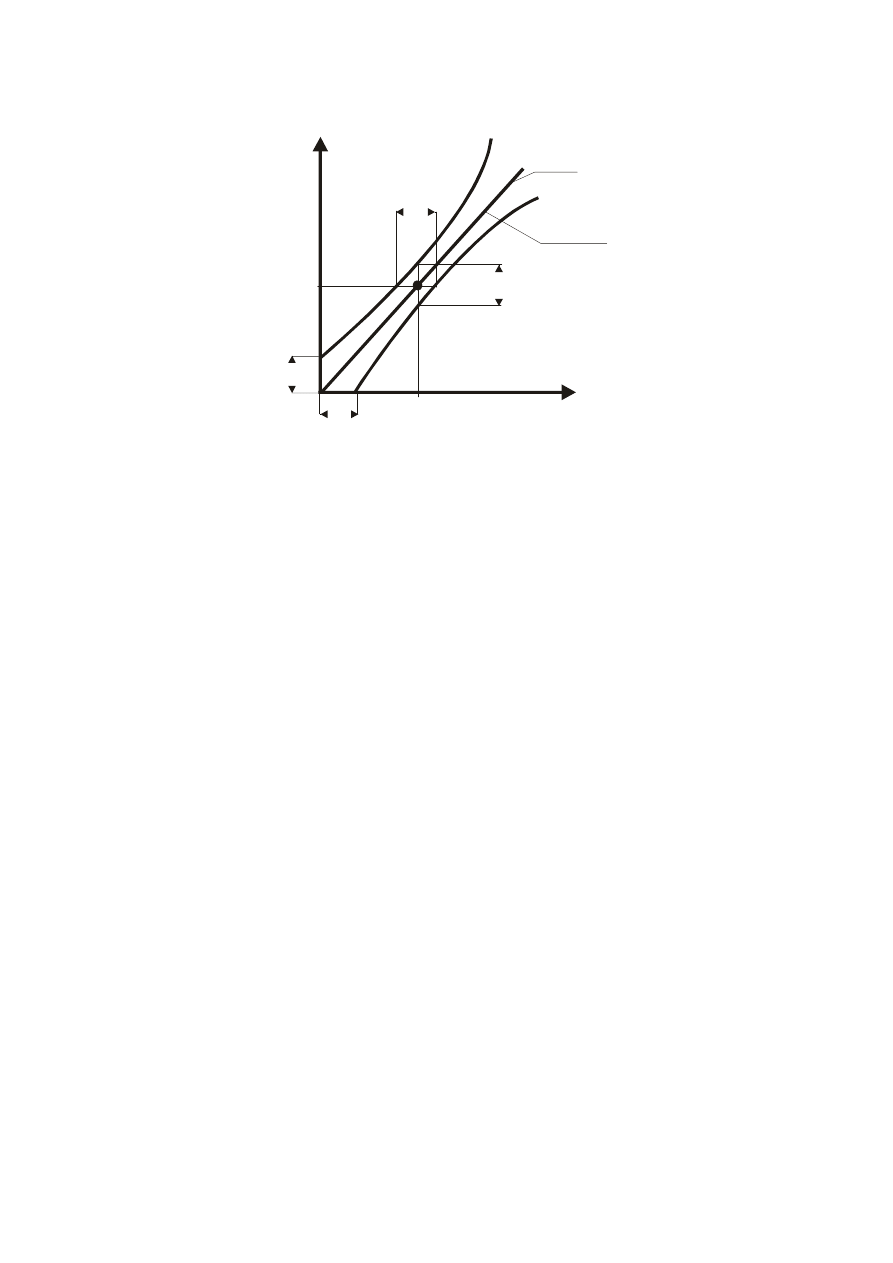
Y
X
Y
zn
Y=f(X)
Idealna
charakterystyka
statyczna
Niejednoznaczność
przetwarzania
odniesiona do
wyjścia
Próg czułości
odniesiony do
wejścia
Próg czułości
odniesiony do
wyjścia
Niejednoznaczność
przetwarzania
odniesiona do
wejścia
X
zn
Rys. 9.
Charakterystyka statyczna przetwornika z
zaznaczonymi jej charakterystycznymi parametrami.
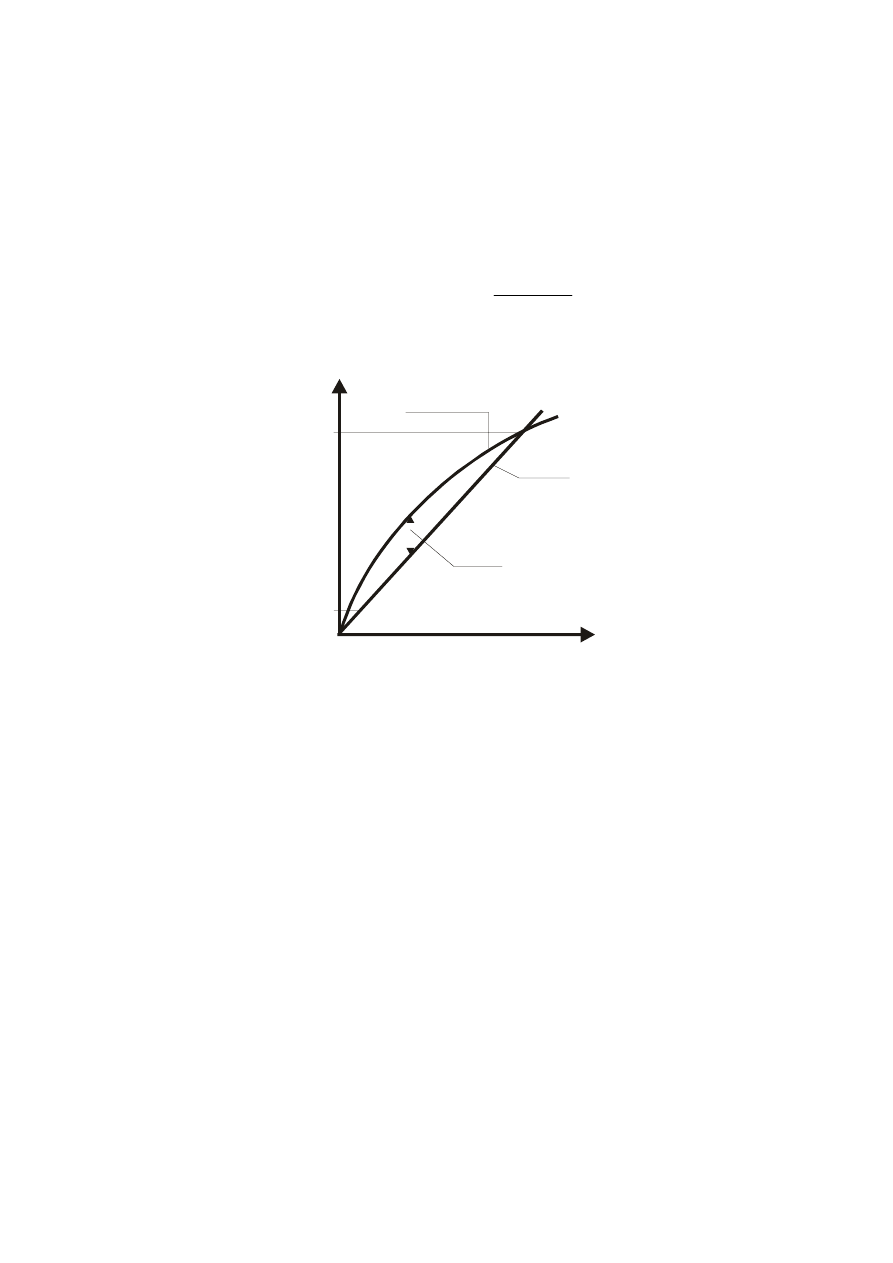
Aproksymacja charakterystyki statycznej przetwornika
Z
reguły do większości charakterystyk przetworników pomiarowych – liniowych
da się zastosować przeliczanie wyniku pomiaru x na wartość y według zależności
liniowej y=ax+b. Zastosowanie przyrządu, który można przeskalować zgodnie z
zależnością y=ax+b pozwala na poprawne przesunięcie punktu zerowego, ale wynik
pomiaru obarczony jest dodatkowo tzw. błędem aproksymacji wynikającym z
aproksymacji funkcji nieliniowej funkcją liniową. Często odstępstwo charakterystyki
przetwornika od funkcji liniowej nazywane jest błędem nieliniowości. (wartość błędu
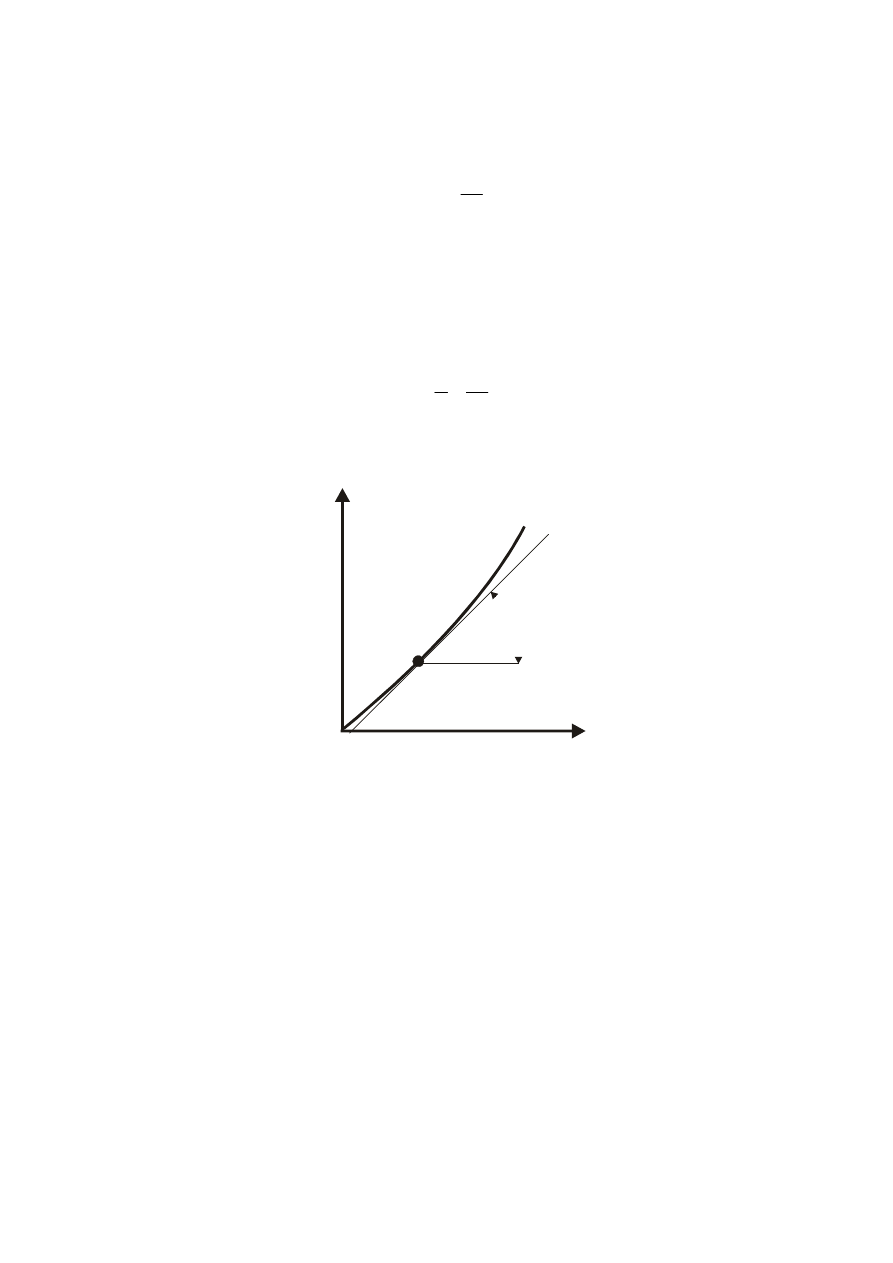
aproksymacji odpowiada wartości błędu nieliniowości). Ilustrację błędu aproksymacji
(nieliniowości) w czasie tej aproksymacji podano na rys. 10.
9
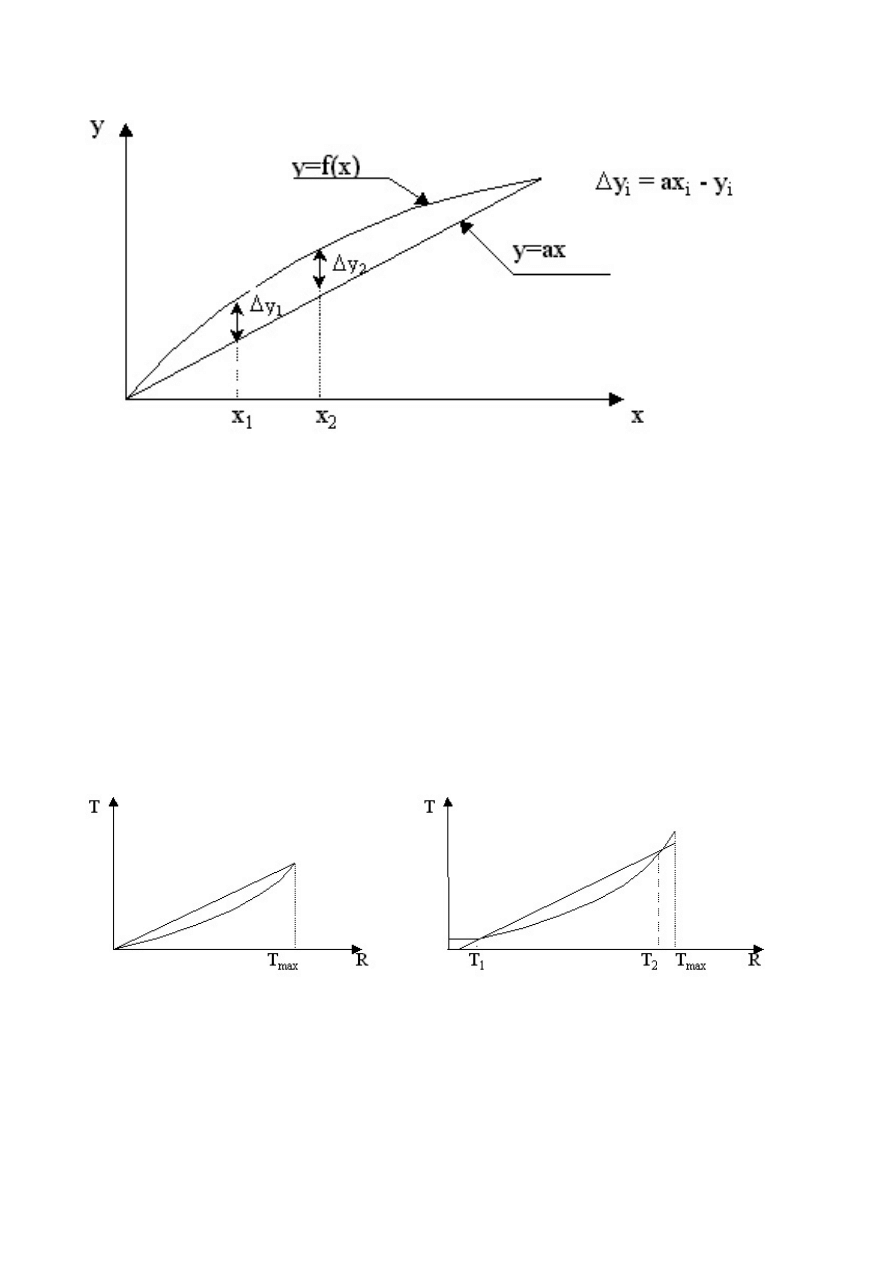
Rys. 10.
Nieliniowa charakterystyka y=f(x) przetwornika i aproksymująca ją prosta y=ax
Mając do dyspozycji np. programowany przyrząd który można przeskalować zgodnie
z funkcją T=A*R+C należy wyznaczyć współczynniki A i C tak, aby wynik cyfrowy
odpowiadał wartości mierzonej dla dwóch wybranych punktów np. T=0 i T=T
max
. Tak
przeskalowany przyrząd wskazywać będzie wartości T=0 i T=T
max
z błędem wynika-
jącym z niedokładności czujnika i z niedokładności przyrządu. Pozostałe wartości z
przedziału 0 do T
max
obarczone będą dodatkowo błędem wynikającym z ewentualnej
nieliniowości charakterystyki samego przetwornika T=f(R). Minimalizację błędu
pochodzącego z nieliniowości charakterystyki można uzyskać aproksymując funkcję
T = f(R) inną prostą (rys. 11b)
Rys. 11.
Aproksymacja charakterystyki nieliniowej prostą łączącą punkty wyznaczające zakres
pomiarowy – rys. po lewej stronie. Aproksymacja charakterystyki nieliniowej prostą minimalizującą
błąd nieliniowości – rys. po prawej stronie.
Do
określenia współczynników prostej T=A*R+C, która minimalizowałaby
błędy nieliniowości można zastosować tzw. metodę najmniejszych kwadratów.
10
Wyszukiwarka
Podobne podstrony:
03 OBLICZ STAT I ZEBR OBC DOC
stat 03
Statystyka, 03-stat
03 Sejsmika04 plytkieid 4624 ppt
03 Odświeżanie pamięci DRAMid 4244 ppt
podrecznik 2 18 03 05
od Elwiry, prawo gospodarcze 03
Probl inter i kard 06'03
TT Sem III 14 03
03 skąd Państwo ma pieniądze podatki zus nfzid 4477 ppt
03 PODSTAWY GENETYKI
Wyklad 2 TM 07 03 09
03 RYTMY BIOLOGICZNE CZŁOWIEKAid 4197 ppt
Rada Ministrow oficjalna 97 03 (2)
więcej podobnych podstron