Część druga instrukcji
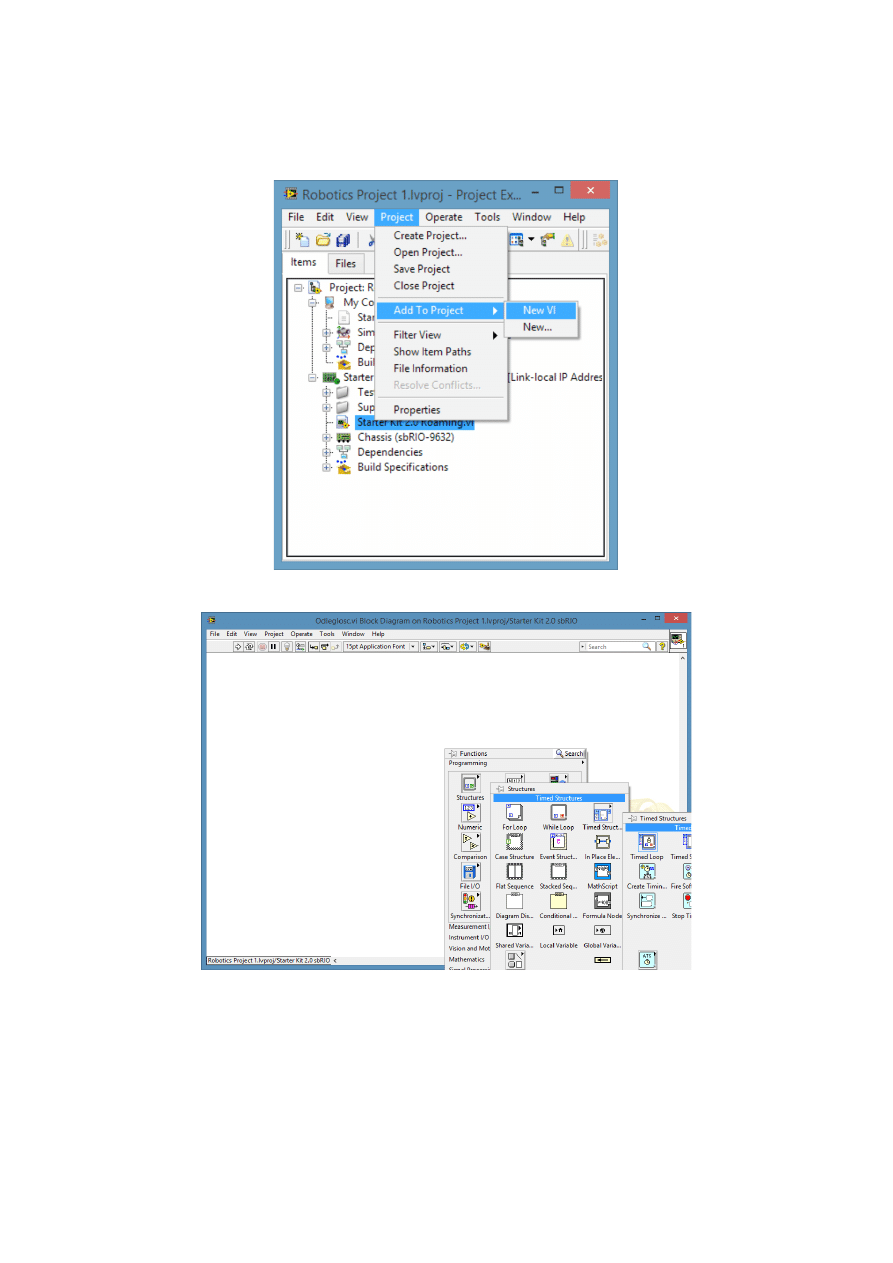
W
celu
stworzenia
własnego
programu
dodajemy
do
istniejącego
projektu
nowy
plik
.vi.
Rys. 9. Dodanie nowego pliku do projektu
Rys. 10. Wstawianie pętli czasowej
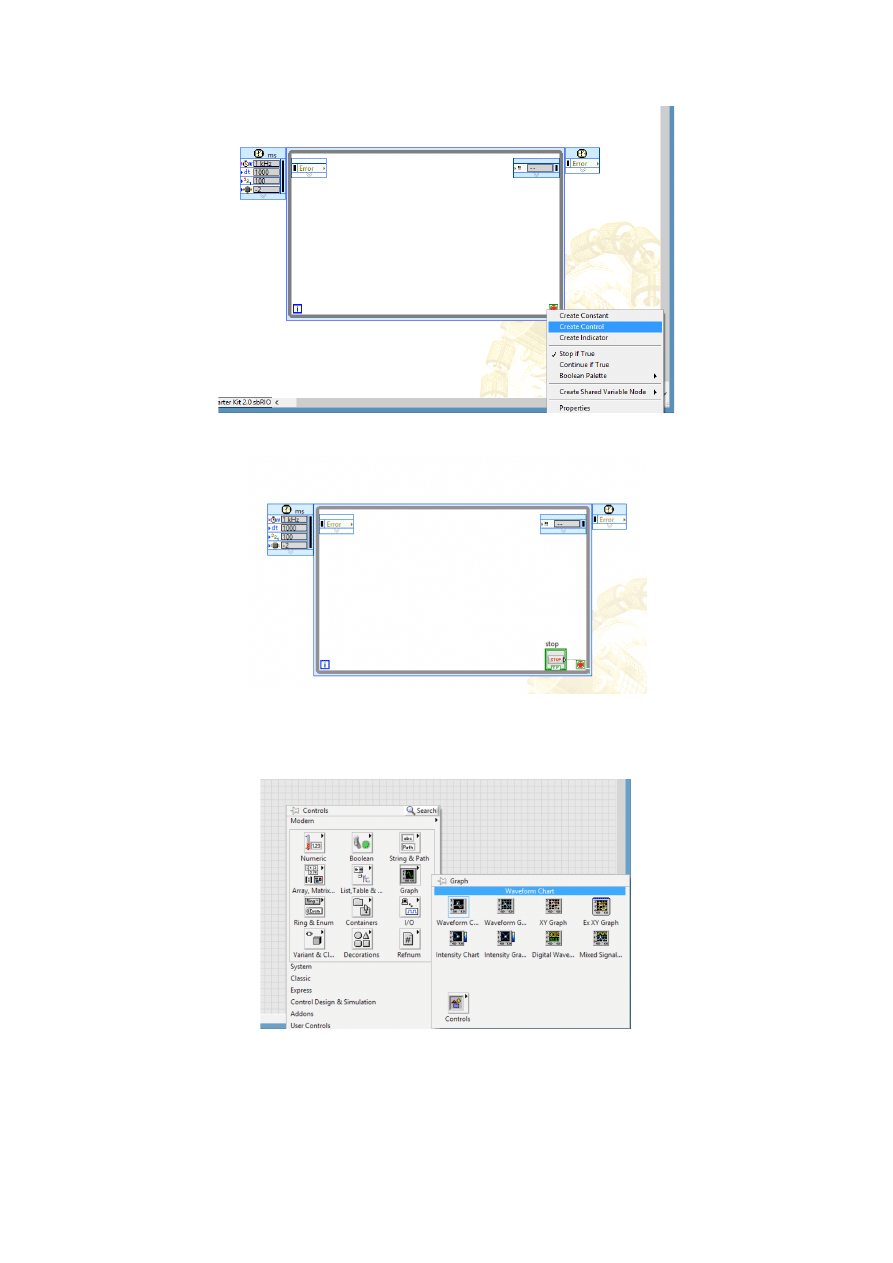
Rys. 11. Ustawienie warunków zakończenia
Rys. 12. Widok pętli czasowej w oknie Block Diagram
W
kolejnym
kroku
dodać
wykres
odległości:
Graph>>Waveform
chart.
Rys. 13. Wstawianie bloczku wykres
Dodać
blok
„Initialize
Starter
Kit”
i
ustawić
odpowiedni
adres
IP.
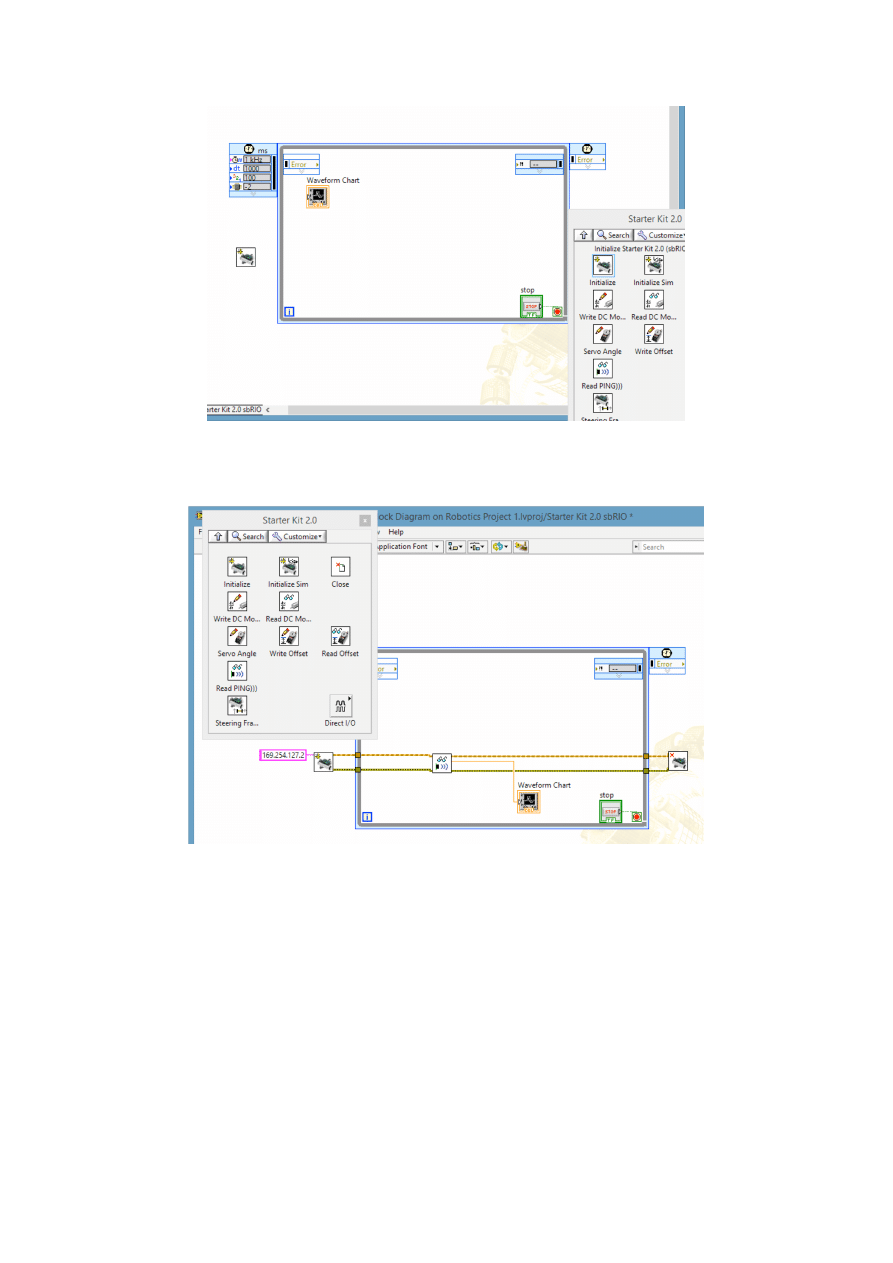
Rys. 14. Ustawienie parametrów połączenia z robotem
Następnie
dodajemy
odczyt
z
sensora
i
zakończenie
połączenia
z
robotem.
Widok
schematu
blokowego
powinien
być,
jak
poniżej:
Rys. 15. Widok schematu blokowego
Poniżej przedstawiono zrzuty ekranowe dotyczące wykorzystania serwomechanizmu
do
sterowania
kątem
obrotu
czujnika
zbliżeniowego.
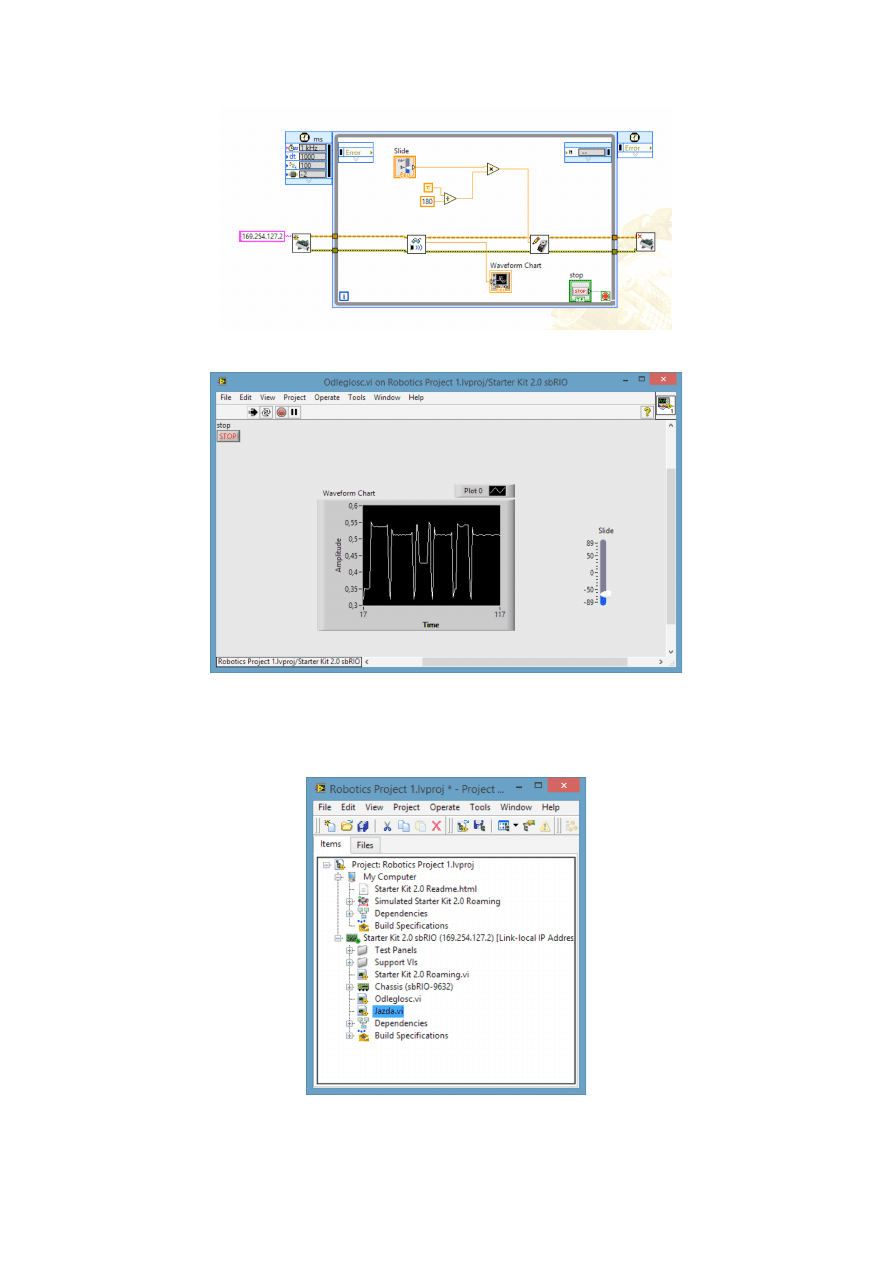
Rys. 16. Schemat blokowy aplikacji
Rys. 17. Panel frontowy aplikacji
Kolejne
rysunki
przedstawiają
aplikację
służącą
do
sterowania
prędkościami
kół
robota.
W
tym
celu
dodajemy
kolejny
plik
.vi
i
uzupełniamy
go
podobnie
jak
przedstawiono
na
rysunkach.
Rys. 18. Nowy plik w projekcie
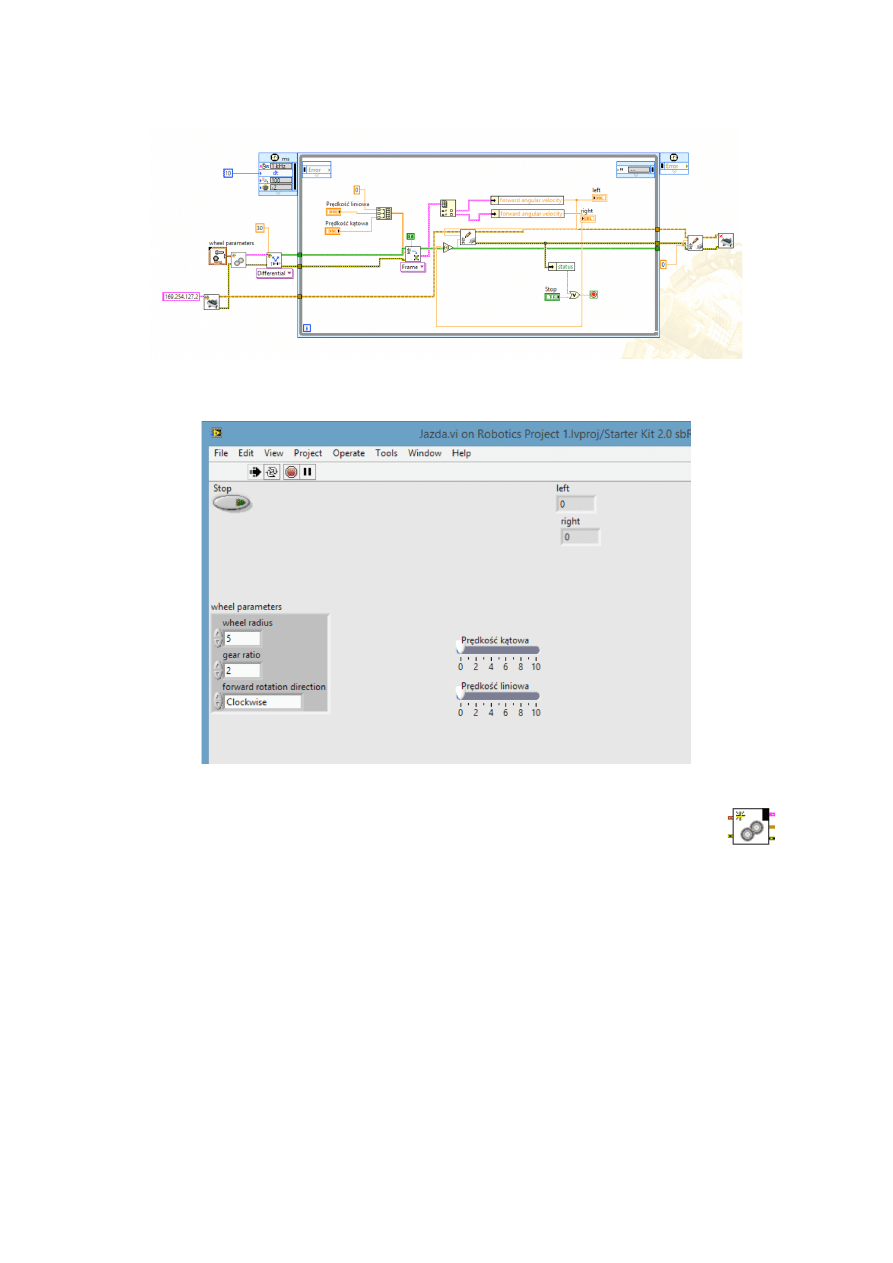
Rys. 19. Widok schematu blokowego
Rys. 20. Widok panelu frontowego
Do stworzenia powyższego programu niezbędny jest plik
Create2Wheels subVI
,
który znajduje się na pulpicie komputera.
RET210 Robotic Teaming
Lab 3: Locomotion
2
6. Close this VI and open loco0.vi. Immediately save it as loco1.vi replacing the version in memory as
well.
7. In your loco1.vi; you should notice a completed front panel with appropriate appearance, data entry,
scale and display format properties preset as shown in figure 2.
Fig. 2: MotorTest.vi front panel
8. Open the block diagram and complete this VI to resemble figure 2. A brief index of functions and
subVIs used is given in table 1.
Icon
Name
Initialize connection to NIRK 1.0 platform
Create2Wheels subVI
Create Differential Steering Frame
Build Array
Index Array
Write DC Motor Velocity Setpoints
Close NIRK FPGA Connection
Table 1: Functions and subVIs used in loco1.vi
Wyszukiwarka
Podobne podstrony:
Lab Robot Starter Kit 1
Lab Robot Starter Kit 3
Kodeks Ninjutsu Starter Kit
1 3 Getting started with Data Studio Lab
1 3 Getting started with Data Studio Lab
Robot Builders Bonanza Bot Kit
spis lab I sem 2010
III WWL DIAGN LAB CHORÓB NEREK i DRÓG MOCZ
Diagnostyka lab wod elektrolit
ZW LAB USTAWY, OCHRONA
LAB PROCEDURY I FUNKCJE
sprzet lab profilografy
sprzet lab mikromanometry
Mechanika Plynow Lab, Sitka Pro Nieznany
więcej podobnych podstron